3.HARDWARE E SOFTWARE UTILIZZATI
3.Hardware e software utilizzati
Il nostro scanner tridimensionale è un sistema costituito da un personal computer che gestisce due telecamere digitali (a seconda del metodo di ricostruzione se ne può usare anche una sola) e un videoproiettore multimediale; questi ultimi sono montati, mediante un’attrezzatura modulare tarata realizzata nelle officine del DIMNP, su un cavalletto con testa di attacco tarata a tre gradi di libertà.
figura 3.1 il nostro sistema di ricostruzione 3.1 Il personal computer
Il personal computer, utilizzato per gestire il sistema di visione ma anche per effettuare l’elaborazione dei dati, è costituito da un PC con processore Pentium®4 a 2.2 GHz e dotato di 1.5 GBytes di Ram e 40 GBytes di HardDisk.
Per pilotare le telecamere il computer è dotato di una scheda di acquisizioni video standard con collegamento firewire IEEE1394; per controllare il proiettore invece si è usata una scheda video Matrox G550 DualHead.
3.HARDWARE E SOFTWARE UTILIZZATI
3.2 Il proiettore
figura 3.2 videoproiettore Hitachi CP-X237
Il proiettore utilizzato è un videoproiettore Hitachi CP-X237 di tipo multimediale, pertanto dotato di una notevole potenza di illuminazione; è dotato di una ghiera di regolazione della messa a fuoco e di una della focale dell’ottica interna (da 36,8 mm a 47,8 mm) per variare l’ingrandimento dell’immagine proiettata; la risoluzione massima ottenibile è di 1024x768 pixel.
3.HARDWARE E SOFTWARE UTILIZZATI
3.3 Le telecamere
figura 3.4 Telecamera Sony XCD-SX900 senza lente montata
Le telecamere utilizzate sono due digital camera Sony XDC-SX900, molto compatte e leggere (quindi molto comode per essere montate in una struttura modulare) e ad alta risoluzione: riportiamo in figura 3.5 le specifiche.
figura 3.5 Specifiche tecniche della telecamera Sony XCD-SX900
La risoluzione delle telecamere è di 1280x960, grazie ad un CCD con pixel di dimensioni 4,65x4,65 micron
3.HARDWARE E SOFTWARE UTILIZZATI
3.4 Gli obiettivi
Nella nostra campagna sperimentale sono stati utilizzati due tipi di obiettivi: entrambi hanno la regolazione manuale della messa a fuoco e dell’apertura del diaframma.
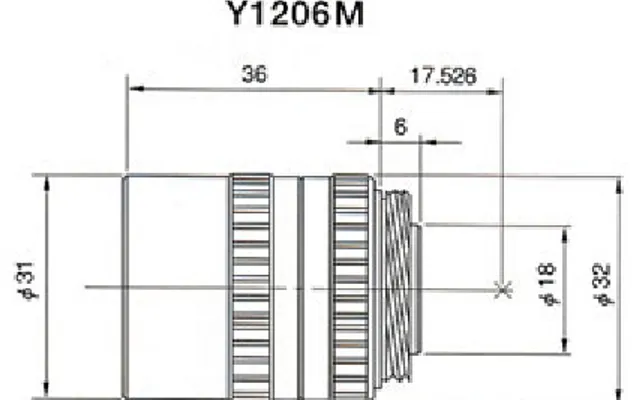
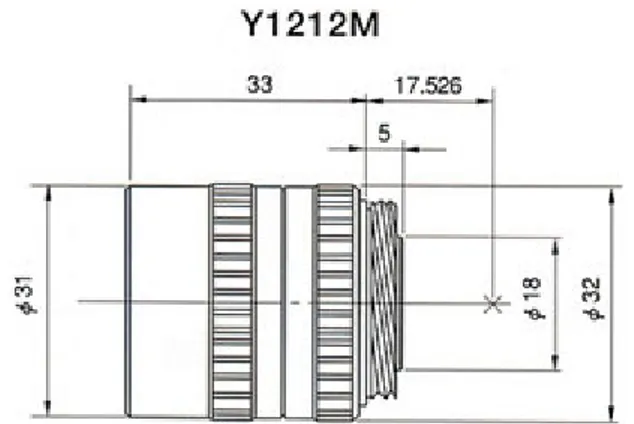
I modelli degli obiettivi utilizzati sono le lenti manuali Yamano Y1206M (con lunghezza della focale di 6 mm ) e Yamano Y1212M (focale da 12 mm); la qualità dei due tipi di lente è la stessa (cambia solo la lunghezza della focale); riportiamo nelle figure seguenti le caratteristiche geometriche e le specifiche tecniche.
figura 3.6 Caratteristiche geometriche dell’obiettivo da 6 mm
3.HARDWARE E SOFTWARE UTILIZZATI
figura 3.8 Caratteristiche geometriche dell’obiettivo da 12 mm
figura 3.9 Specifiche tecniche dell’obiettivo da 12 mm
3.HARDWARE E SOFTWARE UTILIZZATI
3.5 Attrezzatura di supporto
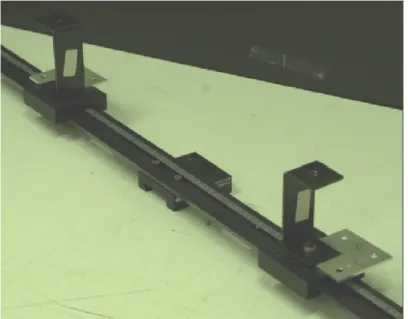
Il proiettore e le telecamere vengono posizionati mediante opportune strutture regolabili su una guida lineare tarata in modo che si possa controllare e bloccare, durante tutto il processo di acquisizione delle immagini, la posizione relativa delle parti del sistema di stereovisione.
figura 3.11 attrezzatura di supporto con proiettore e telecamere montate
3.HARDWARE E SOFTWARE UTILIZZATI
Queste strutture consentono di inclinare il proiettore in modo da poter proiettare ad un’altezza idonea per le telecamere, e di spostare lateralmente sia il proiettore che le telecamere per poter variare la configurazione geometrica del sistema di ricostruzione.
Il tutto è supportato da un cavalletto tarato con testa a tre gradi di libertà (vedi figure 3.13) che consente di effettuare ulteriori regolazioni senza che il sistema di acquisizione perda la posizione relativa tra le parti (in pratica agendo sulla testa non è necessario effettuare una nuova calibrazione).
Il modello del cavalletto è il 117-117X della ditta Manfrotto, capace di una portata di 18 Kg: esso è dotato di una colonna centrare a cremagliera autobloccante, con crociera inferiore per ottenere maggiore stabilità, e tiranti telescopici che consentono il bloccaggio indipendente per ogni gamba; la testa che collega il cavalletto con la struttura modulare è orientabile nelle tre direzioni ed è dotata di bolle di livellamento per ottenere il posizionamento voluto.
3.HARDWARE E SOFTWARE UTILIZZATI
3.6 Software utilizzati
Microsoft® Word Release 2002 - Microsoft Corporation
Microsoft® Excel Release 2002 - Microsoft Corporation
http://www.microsoft.com
Adobe® Acrobat® Release 5.0 - Adobe Systems, Inc.
http://www.adobe.com/acrobat
I-Deas® Imageware Surfacer® Release 2001 for Windows - Structural Dynamics
Research Corporation
http://www.sdrc.com
Matlab® Version 6.5 Release 13 - The MathWorks, Inc.
http://www.mathworks.com
RapidForm Release 1.5 Evaluation copy - Inus Technology, Inc.
http://www.rapidform.com
ACDSee Version 5.0.0.0025 – ACD System, Inc.