179
7
Procedura di riduzione dei dati
delle prove Rotodinamiche continue
Nonostante la sperimentazione oggetto di questa tesi non comprenda i risultati delle prove rotodinamiche continue, la procedura teorica è stata analizzata approfonditamente. Risulta di particolare interesse il confronto della procedura teorica di riduzione dei dati rispetto a quella discreta esposta nel capitolo precedente.Procedura Teorica Continua
7.1
La procedura di riduzione dei dati negli esperimenti continui è basata su un approccio completamente diverso rispetto a quello utilizzato nelle prove discrete, in particolare si analizzano le forze rotodinamiche in un sistema di riferimento rotante fissato con il dinamometro. In questo sistema, verrà mostrato che le forze misurate dal dinamometro sono lineari nelle componenti assolute della forza radiale e negli elementi della matrice rotodinamica. Verrà mostrato in seguito come questa particolare proprietà possa essere usata per determinare le forze radiali e la matrice rotodinamica mediante l’applicazione del metodo dei minimi quadrati ai dati sperimentali.
La relazione tra le forze nel sistema rotante e le forze nel sistema stazionario possono essere espresse come ( ) ( ) cos ( ) sin ( ) ( ) sin ( ) cos X x y Y x y F t F t F t F t F t F t (7.1)
Dove
rappresenta la posizione angolare dell’asse rotante x rispetto a quello assoluto X. La relazione tra le forze nel sistema rotante e le componenti della forza radiale e la matrice rotodinamica vengono riassunte nella seguente equazione:0 0
( ) cos ( ) sin cos sin
( ) sin ( ) cos cos sin
x y X XX XY x y Y YX YY F t F t F A A F t F t F A A
(7.2)Dove è l’anomalìa dell’eccentricità nel sistema stazionario.
180 0
0 0 0
( ) sin cos sin sin sin
cos cos cos sin cos
( ) cos cos cos sin cos
[ sin cos sin sin sin ]
x Y YX YY X XX XY y Y YX YY X XX XY F t F A A F A A F t F A A F A A
(7.3)Inoltre, c’è una relazione lineare tra le componenti delle forze laterali nel sistema rotante,Fx e
y
F
, e le componenti delle forze radiali nel sistema assoluto, F0 X eF0Y, e gli elementi della matrice rotodinamica,
A .Le ultime due equazioni possono essere messe in forma matriciale nel modo seguente:
0 0
cos
sin
cos
cos
sin
cos
cos
sin
sin
sin
sin
cos
cos
sin
sin
sin
cos
cos
sin
cos
X Y x XX y XY YX YY
F
F
F
A
F
A
A
A
o più sinteticamente DM R (7.4) Dove 0 0cos
sin
cos
cos
sin
cos
cos
sin
sin
sin
sin
cos
cos
sin
sin
sin
cos
cos
sin
cos
x y X Y XX XY YX YY
F
D
F
F
F
A
R
A
A
A
M
(7.5)Questo nuovo formalismo suggerisce la possibilità di considerare le forze misurate nel sistema rotante come dati sperimentali che possono essere predetti da un modello lineare che ha come parametri le componenti rk del vettore
R
. in questo caso, il problema di estrapolazione delle forze radiali e rotodinamiche diventa un problema di ricerca dei valori di questi parametri che meglio approssimano i dati sperimentali. I passaggi per risolvere questo problema sono la scelta di una figura di merito che misura il grado di accordo tra i dati sperimentali ed il modello e che in seguito sceglie il parametro che minimizza questa figura di merito.181
Il modello predice che le componenti delle forze nel sistema rotante,
D
, sono lineari nei parametri rk:
6
1, ,
, ,
j k kj kd
r m
con j=1,2 (7.6)Dove
d
j
, ,
è il j-esimo componente del vettoreD
em
kj sono funzioni fissate di, ,
. In ciascun campione di dati, possono essere determinati due punti sperimentali,
, , , j , ,
i d
dove
, ,
identifica la posizione del dinamometro del i-esimo campione e j
, ,
i
d
è il valore del j-esimo componente del vettoreD
durante l’i-esimo campione. Inoltre, se NS è il numero di campioni usati nella procedura di riduzione dei dati, i punti saranno N2Ns, mentre i parametri mobili sono M=6.Per questo modello lineare è possibile l’applicazione del metodo lineare dei minimi quadrati definendo la figura di merito
6
2 2 1 1 , , , , j i i i k j i i i N i k i ij d
r m
(7.7)Dove
ij è l’errore di misurazione ( o deviazione standard) dei punti dj i. Gli errori di misura non sono conosciuti a priori e sono impostati al valore costante
ij
1
.Il valore minimo della figura di merito
2può essere valutato con l’utilizzo delle normali equazioni del problema dei minimi quadrati. In forma matriciale, le equazioni normali possono essere scritte come:
( ),
,
,
,
ik i i i ik N M ij j i i i i j N ij k Mm
m
m
d
d
d
d
m r
r
r
(7.8)E possono essere risolte per il vettore dei parametri r con il metodo standard:
1 T M M T M
m
m
r
r
m
d
(7.9)Per dare un valore alle incertezze dei parametri misurati, è importante notare che gli elementi diagonali della matrice di covarianza normalizzata sono le varianze dei parametri corretti r. Inoltre il vettore errore dei campioni standard dei parametri può essere calcolato come
182
2 1 r Mdiag
N N
M
(7.10)In generale, entrambi i componenti della forza radiale e gli elementi della matrice rotodinamica dipendono dal rapporto di whirl,
. Tuttavia, questa procedura di riduzione dei dati può essere applicata correttamente solo se il campione usato nella procedura si riferisce ad un valore costante di
o se i parametri,F0 X ,F0Y,AXX,AXY,AYX e AYY possono essere considerati costanti nell’intervallo di
che corrisponde ai dati campioni.Questa innovativa procedura di riduzione dei dati viene applicata per ottenere uno spettro continuo delle forze radiali e rotodinamiche su una turbopompa a regime cavitante-non cavitante in condizioni di vibrazione forzata. In modo da semplificare la procedura sperimentale, la velocità del motore principale viene mantenuta costante. Inoltre, la posizione angolare dell’asse rotante (x) rispetto a quello assoluto (X) assume la seguente espressione:
0
t
(7.11)Dove la velocità di rotazione del motore principale,, e l’anomalia iniziale,
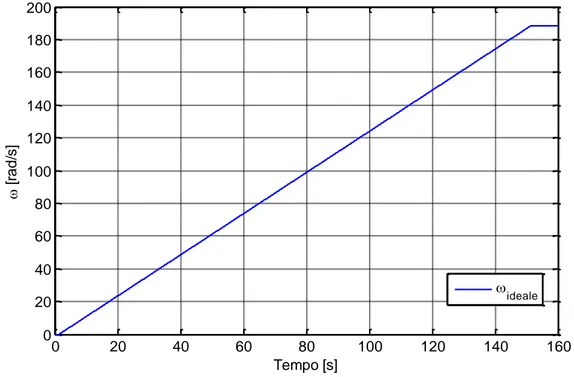
0, possono facilmente essere calcolati utilizzando i sensori ottici posti sull’albero principale (vedi paragrafo 6.3.1.).Il motore secondario invece è stato impostato in modo da ottenere un’accelerazione lineare della sua velocità.
Figura 7-1 Evoluzione temporale della velocità di rotazione del motore secondario in un tipico test continuo
Durante l’esperimento, la velocità del motore secondario seguirà tre fasi, che sono riportate schematicamente qui sotto:
0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 140 160 180 200 Tempo [s] [ ra d /s] ideale
183
1
0
fint t
0 1 1 2 2t
t
t
t
t
t
t
t
(7.12)Nell’intervallo
t t0,1 , la velocità è costante uguale a zero. L’intervallo ( , ]t t1 2 si riferisce ad una fase di accelerazione costante,
. Infine, per tt2 l’accelerazione diventa ancora nulla e la velocità diventa costante al valore raggiunto alla fine della fase di accelerazione,
fin. L’integrazione dell’evoluzione temporale della velocità fornisce le seguenti espressioni per l’anomalia dell’eccentricità: 0 2 2 2 2 2(
)
fin(
)
At
Bt
C
At
Bt
C
t t
0 1 1 2 2t
t
t
t
t
t
t
t
(7.13)Dove
0 è l’anomalia dell’eccentricità al tempo iniziale di acquisizione t0 e le costanti generiche della parabola ,A,B e C vengono specificate:2 2 2 0 1 1 0 1 1 2 0 1
1
1
1
(
)
2
2
2
1
2
1
2
t t
t
t t
t
A
B
t
C
t
(7.14)Infine, imponendo la stessa inclinazione per il profilo parabolico e la curva finale lineare, è possibile esplicitare il tempo t2 :
2
2
2
finB
At
B
t
A
o 2 1 fint
t
(7.15)184
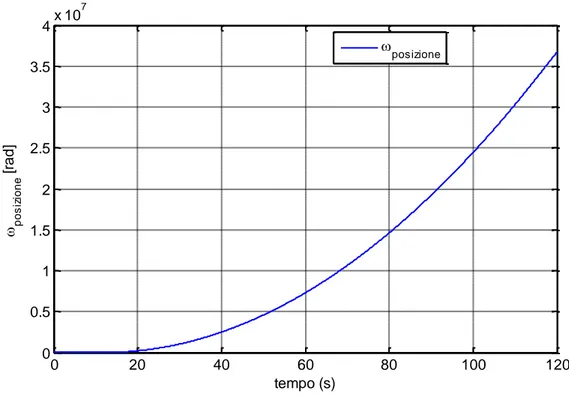
Figura 7-2 Evoluzione temporale dell'anomalia dell'eccentricità in un tipico test continuo
La Figura 7-2 rappresenta la curva che approssima i valori misurati ad ogni giro del motore secondario, utilizzando una generica funzione quadratica
2
At
Bt C
(7.16)Dove A, B e C sono valutate sperimentalmente. Usando le equazioni precedenti quindi è possibile definire univocamente l’anomalia dell’eccentricità per tutta la durata dell’esperimento. È importante notare che la procedura di riduzione dei dati è estremamente sensibile alla posizione assoluta del rotore rispetto al sistema stazionario. Pertanto, sia la posizione del motore primario che quella del secondario devono essere calcolate con estrema precisione. Nelle prove sperimentali, i dati vengono registrati con un samples ratio di 5000 campioni al secondo per una durata totale che può essere di 120 secondi o 160 secondi. Questa differenza sul tempo è dovuta al fatto che durante le prove sperimentali precedenti, il rapporto di whirl massimo raggiunto era di 0.7 con un’accelerazione del motore secondario di 0,2 giri/s2 , mentre nelle attività sperimentali più recenti si arriva a valori prossimi all’unità (per il DAPROT3
massimo era di 0.9). Tuttavia per mantenere la prova all’interno dei 120 secondi era necessario aumentare l’inclinazione e quindi l’accelerazione del motore secondario. Questa variazione di accelerazione avrebbe avuto ripercussioni su tutti gli intervalli di campionatura e facendo venire meno l’ipotesi di costanza dei 6 parametri (F0 X,F0Y,AXX,AXY,AYX e AYY) per quel dato intervallo del rapporto di whirl,
. Dal momento che l’accelerazione precedente aveva dato risultati soddisfacenti, è stato preferito mantenere lo stesso valore.Questa procedura di riduzione dei dati permette la determinazione dello spettro continuo delle forze. Come per i test discreti quindi, si estraggono le forze indotte dal fluido ad una data condizione operativa, si eseguono due prove identiche, una in aria ed una in acqua. Le forze del
0 20 40 60 80 100 120 0 0.5 1 1.5 2 2.5 3 3.5 4x 10 7 tempo (s) po s iz io n e [ ra d ] posizione
185
primo esperimento vengono in seguito rimosse dalle forze del secondo esperimento tenendo conto anche della spinta idrostatica.
Per il confronto dei dati sperimentali, le forze e i momenti vengono normalizzate con le stesse quantità utilizzate per le prove discrete (6.25).
Procedura Sperimentale Continua
7.2
La procedura sperimentale continua per la riduzione dei dati fondamentalmente consiste nello stesso schema logico utilizzato per quella discreta. Tuttavia l’attività sperimentale presenta una serie di semplificazioni che vanno dalla possibilità di svolgere un minor numero di prove sperimentali, con conseguente riduzione dei tempi e dei costi dell’intera campagna, alla maggior completezza dei risultati forniti. Qui di seguito si riporta la tabella delle prove necessarie per eseguire la procedura continua sull’induttore DAPROT3.
186
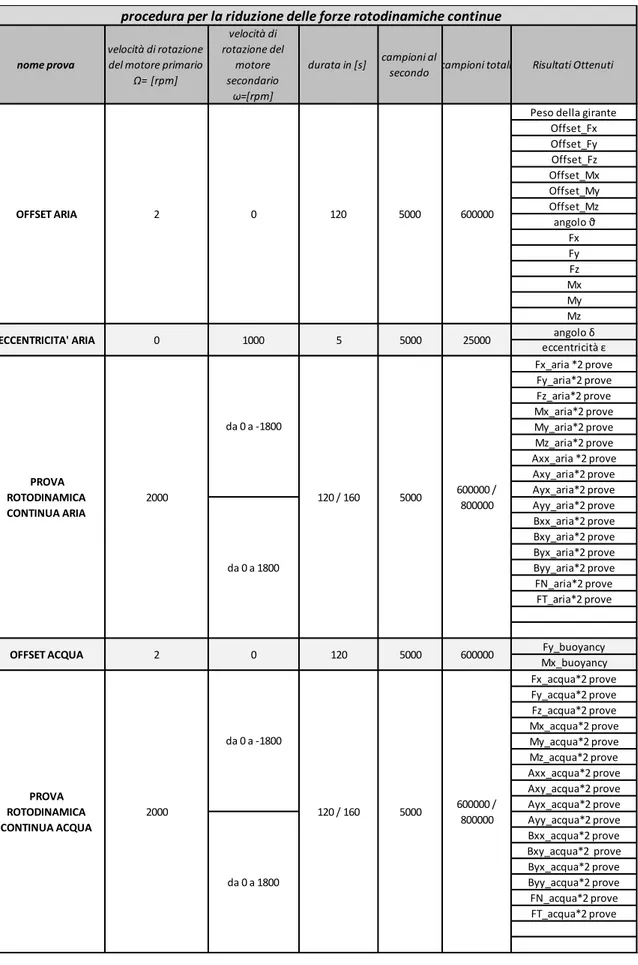
Tabella 7-1 Tabulazione schematica delle prove sperimentali continue per l’induttore DAPROT3
nome prova
velocità di rotazione del motore primario
Ω= [rpm] velocità di rotazione del motore secondario ω=[rpm] durata in [s] campioni al
secondo campioni totali Risultati Ottenuti
Peso della girante Offset_Fx Offset_Fy Offset_Fz Offset_Mx Offset_My Offset_Mz angolo ϑ Fx Fy Fz Mx My Mz angolo δ eccentricità ε Fx_aria *2 prove Fy_aria*2 prove Fz_aria*2 prove Mx_aria*2 prove My_aria*2 prove Mz_aria*2 prove Axx_aria *2 prove Axy_aria*2 prove Ayx_aria*2 prove Ayy_aria*2 prove Bxx_aria*2 prove Bxy_aria*2 prove Byx_aria*2 prove Byy_aria*2 prove FN_aria*2 prove FT_aria*2 prove Fy_buoyancy Mx_buoyancy Fx_acqua*2 prove Fy_acqua*2 prove Fz_acqua*2 prove Mx_acqua*2 prove My_acqua*2 prove Mz_acqua*2 prove Axx_acqua*2 prove Axy_acqua*2 prove Ayx_acqua*2 prove Ayy_acqua*2 prove Bxx_acqua*2 prove Bxy_acqua*2 prove Byx_acqua*2 prove Byy_acqua*2 prove FN_acqua*2 prove FT_acqua*2 prove da 0 a -1800 da 0 a 1800 da 0 a -1800 da 0 a 1800 600000 PROVA ROTODINAMICA CONTINUA ACQUA 2000 120 / 160 5000 600000 / 800000 PROVA ROTODINAMICA CONTINUA ARIA 2000 120 / 160 5000 600000 / 800000 OFFSET ACQUA 2 0 120 5000 ECCENTRICITA' ARIA 0 1000 5 5000 25000
procedura per la riduzione delle forze rotodinamiche continue
187
Come si può notare dalla tabella soprastante la differenza sostanziale sta solo nell’esecuzione delle prove rotodinamiche continue mentre le altre restano le stesse. Infatti, per la procedura continua sono necessarie solo quattro prove, due per i rapporti di whirl negativi (in aria ed in acqua) ed due per quelli positivi.
Come per le prove discrete, le prove rotodinamiche continue utilizzano le prove offset ed eccentricità (eseguite in precedenza) e tramite la procedura teorica illustrata al paragrafo precedente forniscono i valori puntuali di
0 0 0 0 a a X X a a Y Y a a XX XX a a XY XY a a YX YX a a YY YY a a N T F M F M A B A B A B A B F F (7.17) E di 0 0 0 0 w w X X w w Y Y w w XX XX w w XY XY w w YX YX w w YY YY w w N T
F
M
F
M
A
B
A
B
A
B
A
B
F
F
(7.18)Che vengono poi processati analogamente al caso discreto per fornire i valori puntuali delle variabili rotodinamiche 0 0 0 0 X X Y Y XX XX XY XY YX YX YY YY N T
F
M
F
M
A
B
A
B
A
B
A
B
F
F
(7.19).Le due procedure forniscono entrambe buoni risultati come dimostrano campagne sperimentali precedenti. Tuttavia, la semplificazione introdotta dalla procedura continua porterà sempre più le attività sperimentali a servirsi di tale metodo. La semplificazione infatti, come accennato in precedenza, permette di ridurre le prove sperimentali da 39 prove discrete (offset aria, eccentricità, offset acqua, 18 prove rotodinamiche discrete in aria e 18 in acqua) ad un massimo di 7 prove per il caso continuo. Inoltre i dati ottenuti dal metodo discreto sono dei valori medi posizionati su pochi rapporti di whirl, mentre il metodo discreto mostra il comportamento di tutte le variabili di interesse con continuità sull’intero intervallo di studio. La possibilità inoltre di
188
eseguire una sola prova anziché nove permette di mantenere sotto controllo con più facilità le condizioni ambientali durante l’esecuzione della prova stessa, problema che con la dilatazione dei tempi di svolgimento della prova discreta ricopre una certa importanza.
Bibliografia
7.3
[1] L. Torre, A. Pasini, A. Cervone e L. d’Agostino, Continous spectrum of the Rotordynamic Forces on a four bladed Inducer, ALTA S.p.A.
[2] A. Pasini, L. Torre, A. Cervone e L. d’Agostino, Characterization of the Rotordynamic Forces on
Tapered Axial Inducers by Means of a Rotating Dynamometer and High-Speed Movies, ALTA