13
13
SISTEMA DI CONTROLLO TERMICO
13.1 Introduzione
Lo scopo del sistema di controllo termico, spesso indicato con l’acronimo TCS, è di mantenere tutti i componenti all’interno dei limiti ammessi di temperatura durante tutte le fasi della missione, usando le minime risorse del satellite. In questo studio viene analizzata, come già fatto per ogni altro componente, una versione sem-plificata del satellite, adatta ad uno studio di prima approssimazione. I risultati otte-nuti sono abbastanza realistici, in special modo quelli relativi alle superfici radiative di protezione con cui rivestire parti del satellite e sui diversi materiali da frapporre tra i vari componenti per ridurre od aumentare la trasmissione di calore. Attraverso quest’analisi si iniziano a comprendere i problemi che governano la scelta dei dispo-sitivi e che dovranno essere affrontati in maniera più approfondita nelle fasi succes-sive di progetto.
13.2 Caratteristiche fisiche del sistema
13.2.1 Intervalli di temperatura
Una volta definita la posizione e la potenza assorbita da ogni componente, che è lo scopo di tutti i capitoli precedenti, è necessario passare a porre dei limiti di temperatura.
Limiti di temperatura che per vari componenti sono riportati in tabella 13.2-1. In aggiunta al requisito di temperatura, possono giocare un importante ruolo i requi-siti di stabilità e di uniformità di temperatura. La stabilità di temperatura specifica la massima variazione di temperatura ammissibile nel tempo per un dato componente,
mentre la uniformità di temperatura è il massimo gradiente di temperatura all’interno di tutto il corpo. Di seguito sono riportate le definizioni normalmente usate riguardo alle temperature delle apparecchiature.
• Intervallo di temperature operative: i limiti di temperatura all’interno dei quali soddisfano a tutti i requisiti di vita e di prestazioni operative. • Limite di temperatura di accensione: la temperatura minima per cui il
componente può essere attivato, per cui è assicurato che il componen-te non si rompa all’accensione e che raggiunga la componen-temperatura operati-va.
• Intervallo di temperature di non operatività: i limiti di temperatura tra i quali il componente, in stato di non operatività, può sopravvivere senza degradazione delle prestazioni una volta che è stato acceso ed ha raggiunto la temperatura operativa.
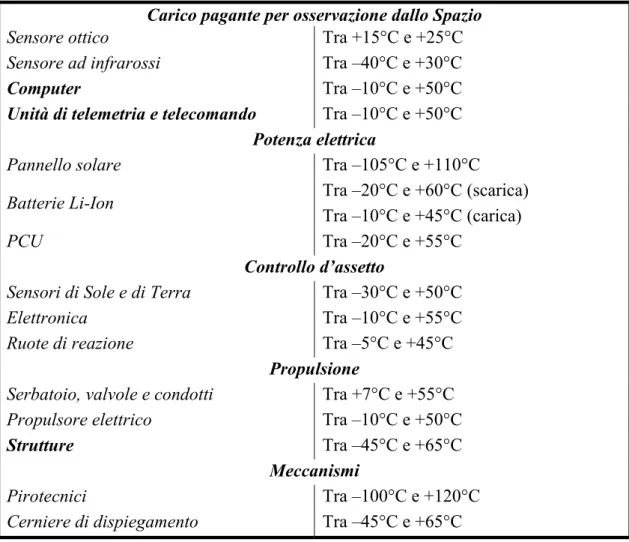
tabella 13.2-1 Temperature operative tipiche per alcuni componenti del satellite. Carico pagante per osservazione dallo Spazio
Sensore ottico Tra +15°C e +25°C
Sensore ad infrarossi Tra –40°C e +30°C
Computer Tra –10°C e +50°C
Unità di telemetria e telecomando Tra –10°C e +50°C
Potenza elettrica
Pannello solare Tra –105°C e +110°C
Tra –20°C e +60°C (scarica) Batterie Li-Ion
Tra –10°C e +45°C (carica)
PCU Tra –20°C e +55°C
Controllo d’assetto
Sensori di Sole e di Terra Tra –30°C e +50°C
Elettronica Tra –10°C e +55°C
Ruote di reazione Tra –5°C e +45°C
Propulsione
Serbatoio, valvole e condotti Tra +7°C e +55°C
Propulsore elettrico Tra –10°C e +50°C
Strutture Tra –45°C e +65°C
Meccanismi
Pirotecnici Tra –100°C e +120°C
Il modo più utilizzato di sviluppare il controllo termico è quello definito a preferenza fredda, o cold bias, che ha il significato di cercare di disegnare una parte, o l’interezza, del satellite in modo che il sistema operi a temperatura inferiore al limi-te superiore per tutlimi-te le apparecchiature presenti in quel compartimento. A seguito di questo può essere che un qualche componente, all’interno della sezione considerata, operi a temperatura al di sotto del suo limite più basso nel caso che non venga impo-sto nessun meccanismo che prevenga queimpo-sto fatto. Normalmente si predispongono dei riscaldatori elettrici controllati attraverso termostati, che operano come degli in-terruttori per accendere spegnere i riscaldatori, con intervallo di temperatura operati-va –50 +160°C, con la possibilità di effettuare più di 100000 cicli accensione spe-gnimento con una precisione ±2 o 3 °C, per mantenere questi apparecchi al di sopra del limite freddo.
13.2.2 Sorgenti di calore
Il satellite, sulla superficie esposta riceve potenza termica, come si può facil-mente osservare dalla figura 13.2.1, attraverso la radiazione solare, che, come ab-biamo già visto nel capitolo relativo al disegno del sistema di potenza, porta una po-tenza media di 1367 W/m2, attraverso la radiazione d’albedo, ovvero la radiazione solare riflessa dall’atmosfera e dalla superficie terrestre, che è il 30 ± 5 % della ra-diazione solare diretta, e dalla rara-diazione infrarossa terrestre, rara-diazione di intensità di potenza molto minore di quella prodotta da Sole, che porta circa 237 ± 21 W/m2. Il satellite viene altresì scaldato internamente attraverso la potenza dissipata da ogni singolo componente.
13.2.3 Trasferimenti di calore
Una breve definizione di calore afferma che questo è una forma di energia che fluisce da un corpo ad un altro a temperatura più bassa.
Questo trasferimento di energia tra diverse temperature può essere suddiviso in tre principali categorie:
• Radiazione: in cui il trasferimento avviene attraverso radiazioni elet-tromagnetiche, è il caso, che abbiamo appena osservato, del calore tra-smesso dal Sole e dalla Terra.
• Conduzione: trasferimento di energia termica attraverso la materia senza movimento di fluido.
• Convezione: trasferimento attraverso il moto di un fluido a contatto di una parete solida.
Come è facile congetturare il trasferimento di calore attraverso la convezione non è di particolare interesse per i satelliti, data l’assenza di atmosfera e quindi di un fluido che possa trasportare calore tra due pareti, o due componenti ad una certa di-stanza. Quanto affermato non è propriamente vero se si va a ragionare all’interno di componenti specifici quali possono essere i tubi di calore, il cui principio di funzio-namento si basa proprio sulla convezione per portare il calore via da un componente che rischia di riscaldarsi troppo. Altre volte in cui la convezione dev’essere analizza-ta è nel caso di satelliti, o componenti, sigillati, in cui all’interno è presente aria o gas, quali potevano essere agli albori dell’industria spaziale.
L’equazione fondamentale dello stato stazionario, della conduzione uni-dimensionale in coordinate rettangolari è
(
T1 T2)
x A k Q ⋅ − ∆ ⋅ = 13.2-1 dove Q è l’energia in W trasferita da 1 a 2, T è la temperatura in gradi Kelvin, k è la conduttività termica in W·m-1·K-1, ∆x è la lunghezza del cammino termico tra 1 e 2 in m ed infine A è l’area ortogonale alla direzione di trasferimento di calore.Ogni materiale a temperatura superiore allo zero termico emette una radiazio-ne elettromagradiazio-netica con potenza e lunghezza d’onde diverse. L’eradiazio-nergia emessa per unità di tempo per unità di area può essere indicata con un’equazione simile alla 5.5-3 e che viene utilizzata per la determinazione della 10.5-9
4 T q=ε⋅σ⋅
in cui ε è l’emettenza della superficie, σ è la costante di Stefen-Boltzmann definita al paragrafo 5.5-1 e T la temperatura, ancora una volta in K.
Si ipotizza di trascurare questo tipo di trasferimento di energia per i compo-nenti all’interno del satellite, dato che le temperature non dovrebbero essere troppo distanti, di modo da avere energia emessa attraverso radiazione elettromagnetica ed assorbita per irraggiamento in condizioni di parità, andando ad utilizzare adatte su-perfici e materiali per isolare efficacemente le apparecchiature che si discostano troppo, come temperatura, dalle altre, come ad esempio il propulsore o il pannello solare. A questo scopo esistono dei fogli chiamati MLI, MultiLayer Insulation o iso-lamento multi strato. Sono essi dei fogli in cui sono alternati strati di Mylar allumi-nizzato o Kapton ed una rete molto fine di materiale plastico, come il Nylon il Da-cron od il Nomex. Questa rete agisce come separatore tra i vari strati di Mylar impe-dendo a quelli adiacenti di toccarsi, in modo da causare una conduzione termica bre-ve attrabre-verso il foglio di isolamento. Normalmente gli strati esterni sono di Kapton, un materiale molto più resistente del Mylar.
L’equazione 13.2-2 viene utilizzata per la determinazione della temperatura dei pannelli di protezione del corpo del satellite e del pannello solare.
13.3 Analisi Termica
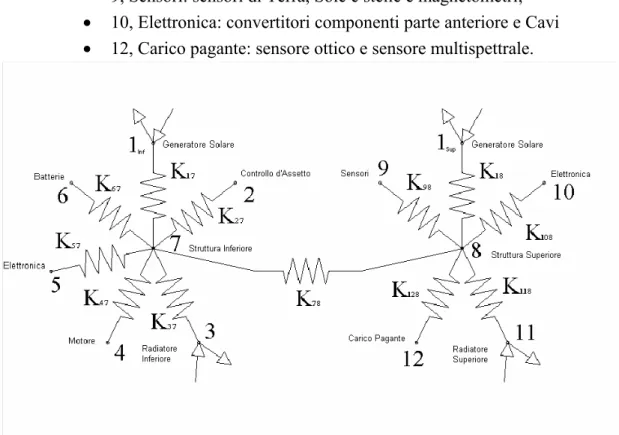
Trascurando, come detto, l’irraggiamento tra i vari sottosistemi, l’analisi ter-mica può essere impostata come l’analisi di un circuito elettrico, in cui la corrente è il flusso di calore, la resistenza è il primo termine dell’equazione 13.2-1 ed il voltag-gio è la temperatura. Uno schema termico del satellite quale è stato definito nei capi-toli precedenti è riportato in figura 13.3.1. In tale figura il sistema è stato diviso in due gruppi di nodi. Facendo riferimento alla tabella 13.3-1 si identificano due gruppi di nodi, quelli anteriori (nodi da 8 a 12) e quelli posteriori (nodi da 2 a 7) composti da:
• 2, Controllo d’Assetto: composto da Ruote di Reazione e torsori ma-gnetici;
• 4, Motore: propulsore, valvole, condotti e serbatoio;
• 5, Elettronica: transponder, PPU, C&DHS, Convertitori componenti parte posteriore e Cavi.;
• 6, Batterie: batteria e PDU; • 7, Struttura posteriore; • 8, Struttura anteriore;
• 9, Sensori: sensori di Terra, Sole e stelle e magnetometri; • 10, Elettronica: convertitori componenti parte anteriore e Cavi • 12, Carico pagante: sensore ottico e sensore multispettrale.
figura 13.3.1Schema termico del satellite utilizzando l’analogia elettrica.
Per ogni nodo è possibile scrivere le equazioni di bilancio energetico,
emessa prodotta
assorbita Q Q
Q + = ,
13.3-1 ricercando gli stati di equilibrio limite come punti in cui le temperature sono massi-me e minimassi-me, usando le equazioni riportate nel paragrafo precedente e le equazioni relative alla quantità di calore prodotta dalla radiazione solare,
θ α⋅cos ⋅ ⋅ =G A Qs s , 13.3-2 in cui Gs è la potenza per unità di superficie trasmessa dalla radiazione solare, A è l’area esposta, α è il coefficiente di assorbimento e θ l’angolo di tra la normale alla superficie ed la direzione della radiazione; l’equazione relativa alla quantità di calore trasmessa dall’Albedo θ α⋅ ⋅0.35⋅ ⋅cos ⋅ ⋅ =G A K F Qa s a 13.3-3
in cui si ha Ka parametro che tiene conto la riflessione effettuata da una superficie sferica della radiazione collimata prodotta dal Sole, equivalente a
2 203 . 0 521 . 0 664 .
0 + ⋅ρ− ⋅ρ in cui ρ è il raggio angolare terrestre definito dalla 5.5-5 ed F è il fattore di vista pari a sin2ρ; l’equazione relativa al calore trasmesso dalla radiazione infrarossa terrestre
θ ε⋅ ⋅cos ⋅ ⋅ =q A F QIR i 13.3-4 con qi la potenza trasmessa dalla radiazione infrarossa terrestre; l’equazione che de-finisce la potenza dissipata all’interno del pannello solare
s G Q1 =η⋅
13.3-5 con η il rendimento del pannello solare.
Queste equazioni possono essere scritte come
(
1 7)
0 17 1+Q +Q +Q −Q −K ⋅ T −T = Q s a IR em 13.3-6(
2 7)
0 27 2 −K ⋅ T −T = Q 13.3-7(
3 7)
0 37 3 +Q +Q −Q −K ⋅ T −T = Q a IR em 13.3-8(
4 7)
0 47 4 −K ⋅ T −T = Q 13.3-9(
5 7)
0 57 5 −K ⋅ T −T = Q 13.3-10(
6 7)
0 67 6 −K ⋅ T −T = Q 13.3-11(
1 8)
0 18⋅ − = − − +Q Q K T T Qa IR em 13.3-12(
9 8)
0 98 9 −K ⋅ T −T = Q 13.3-13(
10 8)
0 108 10−K ⋅ T −T = Q 13.3-14(
11 8)
0 118⋅ − = − − +Q Q K T T Qa IR em 13.3-15(
12 8)
0 128 12−K ⋅ T −T = Q 13.3-16(
)
78(
8 7)
0 6 1 7 7 ⋅ − + ⋅ − =∑
= T T K T T K i i i 13.3-17(
)
18(
1 8)
0 12 8 , 7 8 8⋅ − + ⋅ − =∑
≠ = T T K T T K i i i i 13.3-18tabella 13.3-1 Potenze dissipate all’interno dei vari componenti.
Componente Giorno Notte Componente Giorno Notte Parte Anteriore9 Sensore di Stelle 0 8.90 Carico Pa-gante 30 15 Sensore di Terra 7.50 7.50 Convertitori 7.8 6.4 Sensore di So-le 1 0 Cavi 2.3 1.9 Magnetometro 0.56 0.56 Totale 49.2 40.3 Parte Posteriore17 Trasponder 6 6 PDU 52 20
PPU 15 0 Ruote di
Re-azione 9 0 Propulsore 90 0 Torsore Magnetico 9 0 Stivaggio e Distribuzione 1 0 Convertitori 85.9 18.7 C&DHS 49.7 49.7 Cavi 39.2 13.1 Batteria 21.7 17.6 Totale 378.6 125.1
con Qi le potenza dissipate all’interno dell’i-esimo componente che sono riportate in tabella 13.3-1 , Ti la temperatura dell’i-esimo componente, Qem = q · A la potenza emessa per radiazione con q fornito dalla 13.2-2 e risolte come un sistema.
13.3.1 Ipotesi Semplificative
Poiché le variabili, le temperature e le resistenze termiche, Kij, presenti nel si-stema sono in numero maggiore alle equazioni che lo compongono, bisogna, gioco forza, imporre delle ipotesi semplificative che portino ad una risoluzione accettabile del sistema.
Si può pensare che durante il giorno, in condizioni di equilibrio, il passaggio di potenza tra il nodo 1 e le due strutture, indicate dai nodi 7 ed 8 nella figura 13.3.1, sia limitato a 5 W.
E’ possibile altresì ipotizzare che, sempre durante il periodo di illuminazione ed in condizioni di equilibrio, il passaggio di potenza tra le due strutture sia di nuovo 5 W.
Altre condizioni possono essere le temperature delle due strutture durante il giorno; infatti, progettando a preferenza fredda le temperature dei componenti devo-no essere limitate superiormente, segue che la struttura, su cui deve fluire il calore dissipato dalle varie apparecchiature, deve portarsi ad una temperatura inferiore alla più bassa temperatura massima. Ciò detto si osserva che le temperature meno eleva-te, per la struttura posteriore, sono quelle delle batterie durante la carica, durante il giorno appunto, e delle ruote di reazione, pari a 45°C. Imponendo che la temperatura del componente non arrivi mai alla temperatura massima, ma si fermi, in condizioni di equilibrio, un grado sotto, ai 44 °C, si ipotizza che la temperatura della struttura posteriore si fermi a 43 °C. Per quanto riguarda la temperatura della struttura anterio-re il limite è dato dal sensoanterio-re ottico che, durante il funzionamento in condizioni di il-luminazione, deve avere una temperatura non superiore ai 25 °C. Assumendo ancora una volta che la temperatura del componente sia un grado sotto il limite, 24°C, la struttura si deve fermare a 23°C.
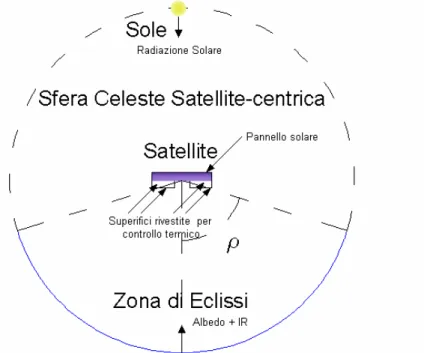
13.3.2 Condizioni geometriche
Sono state utilizzate in tabella 13.3-1, per indicare le potenze dissipate, le de-finizioni giorno e notte. Dato la progettazione in condizioni di equilibrio queste due condizioni rappresentano le condizioni estreme che il satellite può incontrare. Con giorno si indica il momento in cui il Sole si trova in una posizione per cui l’angolo tra la normale al pannello solare e la direzione di provenienza della radiazione solare sia minimo, ovvero allo zenit durante gli equinozi vernali, condizione riportata in figura 13.3.2; si sceglie questa condizione perché, oltre ad avere la massima tempera-tura, il pannello solare si troverà nelle condizioni di massima potenza prodotta e quindi è facile ipotizzare che siano accesi tutti i componenti, si pensi in particolar modo al propulsore. Per la ricerca delle temperature delle superfici esterne, si lavora ipotizzando che il movimento del satellite sia molto più lento della crescita di tempe-ratura in modo da potere approssimare gli stati del satellite come successione di stati
di equilibrio. Questa ipotesi è molto forzata, il satellite ha un periodo di rivoluzione attorno alla Terra di poco più di 90 min, è molto difficile che possa trovarsi sempre in stati di equilibrio. In questo caso, però, si è sicuri che la temperatura rimarrà, co-munque, sempre o un po’ più fredda della massima temperatura o un po’ più calda della minima temperatura determinata, dato che il satellite non avrà il tempo di arri-vare all’equilibrio.
Come notte si indica, invece, l’uscita dall’eclissi durante l’equinozio vernale, condizione per cui la temperatura dovrebbe aver raggiunto il minimo possibile; poi-ché durante questi periodi la durata delle eclissi è maggiore e quindi più bassa è la temperatura a cui il satellite può arrivare.
figura 13.3.2 Condizioni di illuminazione del satellite
13.3.3 Procedimento
Il procedimento inizia col calcolo della temperatura del pannello solare impo-nendo che l’angolo θ nelle equazioni 13.3-2, 13.3-3 e 13.3-4 sia nullo.
Una volta determinata questa temperatura si passa a calcolare le resistenze termiche K17 e K18 poiché sono note, per ipotesi, le temperature delle strutture e le potenze termiche trasmesse per conduzione tra il pannello solare e le due sotto-strutture. E’ possibile altresì individuare K78, dacché, sempre per ipotesi, è nota la po-tenza trasmessa per conduzione e le temperature dei due nodi.
(
)
7 5 5 3 ; 2 3 7 37⋅ − =∑
+ − ≠ = i i i Q T T K 13.3-19(
)
12 5 5 11 ; 9 11 8 118⋅ − =∑
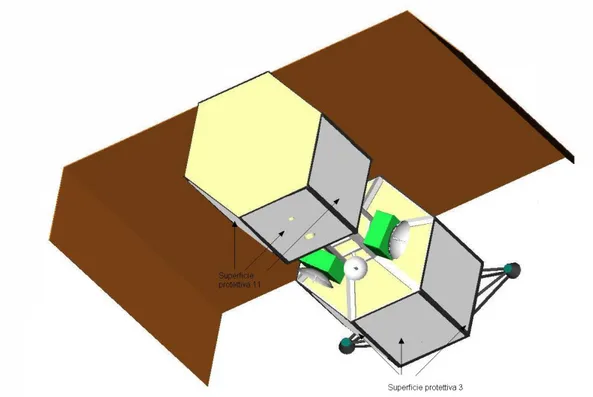
+ + ≠ = i i i Q T T K 13.3-20 con cui si entra nella 13.3-8 e nella 13.3-15 per calcolare la temperatura massima, ma anche minima dei pannelli di protezione, la cui posizione è vista in figura 13.3.3, ri-cercandone al contempo i materiali attraverso i parametri α ed ε affinché tali tempe-rature non siano superiori alla temperatura delle due strutture 7 ed 8, in maniera da far fluire il calore verso l’esterno. Nota la temperatura massima di 11 e 3 si determi-nano facilmente K37 e K118.figura 13.3.3 Disposizione dei pannelli di protezione termica
Note le potenze dissipate dai vari componenti si riescono a conoscere tutti i Kij rimasti.
Durante la fase notturna, non si conoscono i trasferimenti di calore tra 1 e 7, tra 7 ed 8 e tra 1 ed 8. Poiché la potenza termica trasmessa dall’IR terrestre è molto elevata si suppone che la temperatura del pannello si calcoli trascurando il contributo dato dalla conduzione.
(
)
(
)
(
)
(
)
(
T T)
Q Y Z K Y X Q T T K Z T T K Y T T K X T T K anteriore posteriore − + = − ⋅ − − = − ⋅ = − ⋅ − = − ⋅ = − ⋅ 11 8 118 3 7 37 1 8 18 7 8 78 1 7 17 13.3-21 in cui Qposteriore è la potenza totale dissipata nella parte posteriore e Qanteriore quella nella parte anteriore, con l’aggiunta delle equazioni 13.3-8 e 13.3-15 per il calcolo di T3 e di T11.Per la risoluzione di tale sistema bisogna utilizzare un procedimento iterativo in quanto per il calcolo delle temperature dei pannelli di protezione 3 ed 11 bisogna conoscere X, Y e Z, per la cui conoscenza bisogna sapere T3 e T11.
Noti i Kij dalla fase di giorno la soluzione del sistema può essere univocamen-te deunivocamen-terminata, in quanto composto da setunivocamen-te incogniunivocamen-te in setunivocamen-te equazioni, attraverso la scelta di opportuni α ed ε.
Una volta note T7 e T8 si possono determinare tutte le temperature della com-ponentistica.
Come verifica dei risultati prodotti si può analizzare lo spessore e l’area dei contatti tra i componenti attraverso la formula
t N A k Kij = ij ⋅ ⋅ 13.3-22 con kij la conduttività, t lo spessore, che ipotizziamo essere 1 mm, ed A l’area del contatto, supposto circolare di raggio A , ed N il numero dei contatti, che per ipo-π tesi, per ogni componente, è preso pari a 6.
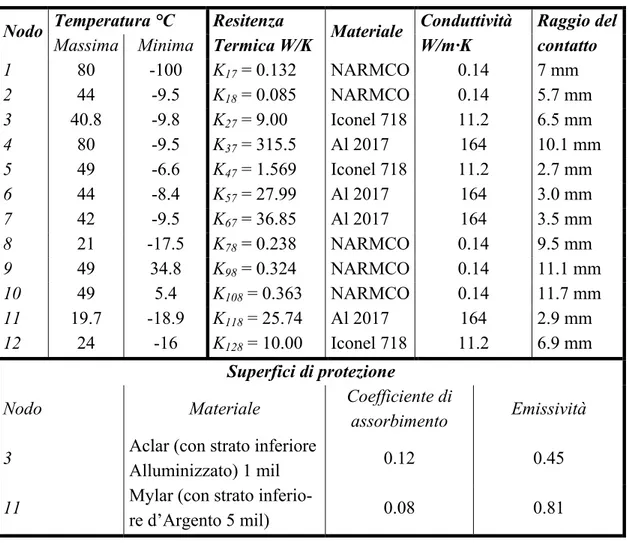
13.3.4 Risultati
I risultati sono riportati nella tabella 13.3-2 qui sotto riportata. Come si può vedere la temperatura più critica è quella delle ruote di reazione, nodo 2, per cui la temperatura di –7.8 °C è al di sotto del limite minimo di operatività. Nel calcolo ap-pena effettuato la ruota di reazione, per la ricerca della minima temperatura, è suppo-sta ferma, in realtà è una condizione molto difficile da avere, data la necessità di con-trollo. Dunque è ipotizzabile una potenza dissipata internamente che la riscaldi por-tandola all’interno dell’intervallo di operatività. Se ciò non fosse sufficiente vanno posizionati dei riscaldatori elettrici, di cui abbiamo già tenuto conto nel disegno del
sistema di potenza e per cui è stata allocata una potenza del 5% della potenza com-plessiva.
I materiali di cui devono essere ricoperte le superfici che si affacciano a Terra sono il Mylar, di cui abbiamo già parlato e l’Aclar, una materiale fluoro-polimerico, utilizzato anche nel settore farmaceutico per le confezioni delle pillole. Per quanto riguarda i contatti il NARMCO è un materiale composto a base polimerica, l’Iconel 718 è invece una super-lega a base di Nichel.
tabella 13.3-2 Risultati analisi termica Temperatura °C Nodo Massima Minima Resitenza Termica W/K Materiale Conduttività W/m·K Raggio del contatto 1 80 -100 K17 = 0.132 NARMCO 0.14 7 mm 2 44 -9.5 K18 = 0.085 NARMCO 0.14 5.7 mm 3 40.8 -9.8 K27 = 9.00 Iconel 718 11.2 6.5 mm 4 80 -9.5 K37 = 315.5 Al 2017 164 10.1 mm 5 49 -6.6 K47 = 1.569 Iconel 718 11.2 2.7 mm 6 44 -8.4 K57 = 27.99 Al 2017 164 3.0 mm 7 42 -9.5 K67 = 36.85 Al 2017 164 3.5 mm 8 21 -17.5 K78 = 0.238 NARMCO 0.14 9.5 mm 9 49 34.8 K98 = 0.324 NARMCO 0.14 11.1 mm 10 49 5.4 K108 = 0.363 NARMCO 0.14 11.7 mm 11 19.7 -18.9 K118 = 25.74 Al 2017 164 2.9 mm 12 24 -16 K128 = 10.00 Iconel 718 11.2 6.9 mm Superfici di protezione
Nodo Materiale Coefficiente di
assorbimento Emissività 3 Aclar (con strato inferiore
Alluminizzato) 1 mil 0.12 0.45
11 Mylar (con strato