1 Misura della velocità con sistemi contactless
In questo capitolo vengono brevemente descritti i principali sistemi per la misura della velocità di un veicolo con metodologia contactless, con riferimenti sia a prototipi sperimentali che a sistemi disponibili in ambito commerciale. Dopo una breve descrizione del principio fisico adottato da ogni particolare famiglia di sistemi, sono riportati riferimenti a realizzazioni specifiche, sia in termini di metodi implementativi che come caratteristiche di risoluzione, precisione ed efficienza in generale.
1.1 Misura con sistemi Doppler
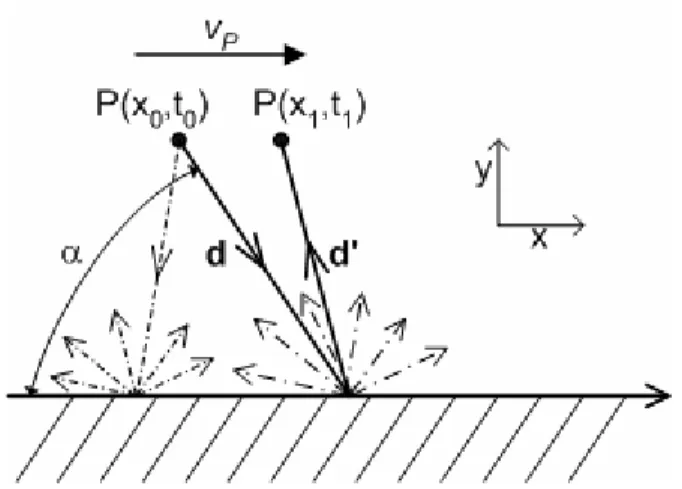
La misura della velocità tramite effetto Doppler si basa sul noto principio fisico. Si consideri un sistema di riferimento solidale al mezzo nel quale si propagano le onde e una sorgente/ricevitore puntiforme P che emette onde sferiche con frequenza f0 e che si muove con velocità vp lungo l’asse x (figura 1.1).
Il segnale trasmesso a t0 in x0 colpisce la superficie del terreno e una parte del segnale riflesso viene ricevuto a t1 in x1 da P.
figura 1.1: misura della velocità di P usando l'effetto Doppler Con la condizione 0 p V d f
>> (in tal caso
0
' Vp cos
d d
f α
− ≈ ⋅ ), se il terreno ha delle
rugosità di dimensioni confrontabili con la lunghezza d’onda (in modo che l’onda sia riflessa con scattering, ovvero il terreno non si deve comportare come uno specchio acustico o ottico, altrimenti a t1 in x1 non si riceverebbe alcun segnale), l’onda ricevuta in P avrà una frequenza fR legata a quella di partenza dalla relazione (1.1) (c è la velocità di fase dell’onda nel mezzo considerato), ovvero la velocità è legata alla frequenza del segnale ricevuto da una relazione di tipo lineare. La relazione (1.1) è valida sia per un’onda acustica che per un’onda elettromagnetica. 2 cos R d p d f f f f V f c α = + ∆ ⋅ ⋅ ⋅ ∆ = (1.1) 1
Le caratteristiche fisiche della superficie di scattering (asfalto o comunque un terreno che possa essere percorso da un’autovettura) impongono di usare dei sistemi a ultrasuoni nel caso di onde acustiche e sistemi a qualche decina di gigahertz nel caso di onde elettromagnetiche, per poter avere scattering.
Sistemi di questo tipo sono stati realizzati sia in forma di prototipi (si veda a tal proposto i riferimenti [2], [3], [4], [5] riportati in bibliografia), che per essere destinati alla commercializzazione.
Utilizzando un sistema misto a ultrasuoni (per velocità fino a 30 km/h per rendere trascurabile l’influenza del vento) e a microonde (per velocità maggiori di 30 km/h) per una distanza complessiva percorsa dall’onda di 1 m, sono stati ottenuti in [3] i risultati riportati in tabella 1.1; in particolare l’errore risulta principalmente dovuto alla distribuzione statistica dello scattering provocato dalla superficie del terreno e risulta grosso modo proporzionale al rapporto fra lunghezza d’onda e distanza percorsa dall’onda (l’errore dovuto alla variabilità dell’altezza da terra e di conseguenza dell’angolo di impatto è eliminato dal cosiddetto principio di Janus, ovvero si utilizza una configurazione con due sensori in cui un sensore è rivolto in avanti e l’altro indietro, in modo che l’effetto dell’angolo si faccia sentire in maniera opposta nei due sensori).
In un altro lavoro, si veda [4] per maggiori dettagli, sono stati usati sensori elettromagnetici a 61 GHz in configurazione di “Janus”, con un sistema di rilevazione della frequenza Doppler basato su una FFT eseguita sul segnale da un DSP (l’autore ha utilizzato un Motorola DSP 56000, 24 bit a virgola fissa), previa
demodulazione sincrona eseguita con il segnale trasmesso e conversione A/D (in questo caso la frequenza Doppler va da 0 kHz per velocità nulla, fino a 20 kHz per velocità di 250 km/h).
tabella 1.1: errore medio sperimentale riportato in [3]
Tipo di sensore Lunghezza d’onda Errore relativo medio
10 GHz microonde 3 cm 1,5 – 3%
24 GHz microonde 1,25 cm 1,0 – 2%
80 kHz ultrasuoni 4,13 mm 0,8 – 1,5%
200 kHz ultrasuoni 1,65 mm 0,5 – 1,2%
Secondo l’autore infatti i sistemi “classici” di rilevamento della frequenza (ad esempio valutando l’attraversamento per zero) per questo sistema tendono a dare scarsi risultati in presenza di asfalto bagnato o ghiacciato, mentre un sistema basato su FFT fornisce risultati migliori e può essere ulteriormente migliorato introducendo un filtraggio numerico sui campioni del segnale, per evidenziare la componente utile del segnale (ovvero la frequenza del segnale demodulato) sul rumore.
L’alta frequenza del segnale (61 GHz) viene scelta sia per avere una piccola dimensione dei componenti radianti che una elevata attenuazione da parte dell’ambiente circostante, in modo da minimizzare le mutue interferenze.
(questo in base al contenuto frequenziale del segnale velocità del veicolo), ne deriva un intervallo temporale sul quale eseguire la FFT di 40 ms: l’autore ha ottenuto un risultato, in termini di accuratezza, con errore medio dell’ordine dello 0,35% rispetto a un sistema di riferimento costituito da una ruota di Peiseler (con risoluzione di 1000 impulsi per giro, il raggio della ruota però non è citato), errore che diminuisce nel caso di utilizzo su strade asciutte; possibili miglioramenti consistono in un procedimento di media dei campioni oppure nell’utilizzo di un filtro di Kalman il quale ha permesso una diminuzione del rumore di un fattore 1,5.
Commercialmente esistono soluzioni che sfruttano l’effetto Doppler, ad esempio il “Delta speed sensor DRS 1000” prodotto dalla GMH Engineering (si veda [6], [7]). Si tratta di un dispositivo che integra in un contenitore (rappresentato in figura 1.2 e adatto a essere installato in ambienti sottoposti ad agenti atmosferici) l’antenna, la sezione a radiofrequenza e l’elettronica di controllo, che necessita di essere solamente alimentato e che fornisce in uscita un’onda quadra con frequenza fondamentale pari al doppio della frequenza Doppler ∆fd (quindi proporzionale alla differenza di velocità fra il luogo in cui è installato e l’oggetto che ha scatterato l’onda, in generale l’asfalto, come nel montaggio in [8]).
Il “Delta speed sensor DRS 1000” può essere anche montato fisso rispetto al terreno ed, in questo caso, misura la velocità di un oggetto in movimento, come in [9], dove è riportato un esempio a tal proposito.
figura 1.2: immagine del DRS 1000 prodotto dalla GMH Engineering [6]
tabella 1.2: specifiche DRS 1000 prodotto dalla GMH Engineering [6]
Intervallo di misura della velocità 0,5-215 m/s Frequenza di funzionamento 35,5 GHz Traslazione di frequenza dovuta
all’effetto Doppler (sensore montato con un angolo di 30° rispetto al terreno)
236 Hz
d p
f V
∆ = ⋅
Errore relativo in condizioni ideali
(
0.34 0.0023)
%p
V
± ⋅
Tensione di alimentazione in DC 10,5-16 V
Potenza assorbita 2,4 W
Frequenza segnale di uscita 2⋅∆fd Hz
Si noti che l’errore dipende dalla conoscenza dell’angolo fra il centro del fascio dell’onda e il piano della superficie sulla quale si muove l’autoveicolo (figura 1.3): infatti, a parità di velocità, la traslazione in frequenza dovuta all’effetto
Doppler (shift Doppler) dipende linearmente dal coseno dell’angolo suddetto, pertanto cambiamenti dell’angolo di offset (dovuto ad esempio a oscillazioni della scocca che è normalmente è collegata alle ruote con un sistema di sospensioni) producono un errore dovuto al fatto che, nel legame fra velocità e frequenza, si considera un angolo fisso (altrimenti, se fosse possibile conoscere la variazione dell’angolo in tempo reale, si potrebbe eliminare questo errore).
Per migliorare l’accuratezza della misura si può utilizzare (previa una conversione A/D) un filtraggio numerico adatto (cosa che sta divenendo sempre più comune anche in sistemi di basso costo).
figura 1.3: tipica installazione del DRS 1000
La disponibilità di sensori a radiofrequenza efficienti, economici e affidabili che lavorano a qualche decina di gigahertz, (ad esempio realizzati in forma sperimentale con antenne a microstricia e transistori HEMTs, si veda ad esempio [10] e [11]), è comunque un requisito per l’affermazione di un sistema commerciale da adottare su larga scala per sistemi automotive.
1.2 Misura con sistemi di radioposizionamento
I moderni sistemi di radioposizionamento (tipo GPS ecc) permettono di conoscere la posizione del ricevitore sulla superficie terrestre grazie ai segnali irradiati da una popolazione di satelliti orbitanti a bassa quota: dalla conoscenza dell’orario (contenuto nell’informazione trasmessa da ogni satellite che a sua volta lo ricava da un orologio atomico), dell’orbita di ogni satellite e dall’individuazione dell’istante di arrivo del segnale emesso da ogni satellite (in generale ne bastano tre, ma più sono e più l’accuratezza aumenta) il ricevitore è in grado di determinare la sua posizione: pertanto, utilizzando i dati sulla posizione al variare del tempo, è possibile ricavare la velocità.
La risoluzione sulla posizione di un tipico sistema GPS arriva a 1 cm con un’accuratezza (che dipende sostanzialmente dall’incertezza sull’istante di arrivo del segnale dal satellite i-esimo al ricevitore e dalla variabilità delle condizioni atmosferiche che influenzano la velocità di fase dell’onda elettromagnetica irradiata dai satelliti stessi) di 3 m al 95% CEP2 (1,8 m utilizzando DGPS, ovvero un sistema GPS che utilizza anche un segnale di riferimento emesso da un punto fisso sulla superficie terrestre, ovviamente di posizione nota): l’accuratezza sulla posizione, se sono usati direttamente i dati sulla posizione riferiti al tempo in cui sono stati calcolati, si ripercuote sulla misura della velocità che pertanto risulta
2
CEP sta per Circle Error Probabile, significa che al 95% la posizione vera è contenuta in un cerchio di raggio pari al valore indicato centrato nella posizione indicata dal GPS
affetta da un rumore di fondo elevato.
Tuttavia, dato che la densità spettrale di potenza dell’errore è concentrata a frequenze molto basse, ovvero l’errore che affligge due misure vicine nel tempo è statisticamente molto correlato, in una misura di velocità con intervalli di aggiornamento frazioni di secondo si fa sentire meno: detta X(t) la posizione, in una dimensione per semplicità, e V(t) la velocità, si ha la (1.2)
( )
1 0( )
1( )
0( )
1( )
0 1 1 0 1 0 1 0 ( ) ( ) GPS GPS GPS X t X t x t x t X t X t V t t t t t t t − ∆ − ∆ − = = + − − − (1.2)quindi in base alla correlazione statistica di ∆x t
( )
1 e ∆x t( )
0 , nell’intervallo di tempo indicato, la misura è più o meno accurata.Possono poi essere adottati sistemi di filtraggio numerico per limitare tale rumore, da semplici filtri che effettuano una media, fino a implementazioni più complesse. A livello commerciale la società Corrsys-Datron produce un sistema di misura di velocità completo di interfacce per la comunicazione basato sul rilevamento GPS ([12]), che è dichiarato avere le caratteristiche riportate in tabella 1.3.
tabella 1.3: specifiche MicroSat prodotto dalla Corrsys-Datron [12]
Intervallo di misura della velocità 0,1-1,850 km/h
Risoluzione 0.01 km/h
Accuratezza 0,1 km/h
Frequenza di aggiornamento della misura
Altri (si veda [13]) ricavano la misura della velocità dalla traslazione della frequenza del segnale ricevuto causata dall’effetto Doppler, con risultati simili a quelli di tabella 1.3, ma con una frequenza di aggiornamento della misura fino a 100 Hz.
Questi sistemi sono stati pensati però per utilizzo in condizioni particolari (ad esempio per test da parte di case costruttrici ecc), sono molto costosi e ingombranti.
Ci sono situazioni poi, in cui il segnale non può essere ricevuto o viene ricevuto male a causa di ostacoli frapposti fra l’antenna ricevente e i satelliti del sistema GPS, rendendone non visibili alcuni di quelli che dovrebbero esserlo in quel momento in quel punto (in ogni zona del mondo con il cielo libero è assicurata la visione di almeno 4 satelliti), situazione che si verifica, ma non solo, nelle gallerie: in tali condizioni, pertanto, non può essere conosciuta la velocità nemmeno con l’accuratezza di cui il sistema è capace, oppure le prestazioni del sistema decadono peggiorando ancora di più l’accuratezza.
Un nuovo sistema di radioposizionamento, che dovesse essere messo all’opera (vedi Galileo e altri) con eventualmente caratteristiche di accuratezza migliori, manterebbe il problema della necessità di una visibilità su una vasta porzione di cielo per poter funzionare correttamente, con le conseguenze che questo comporta.
1.3 Misura utilizzando il metodo del tempo di volo
effettuata sfruttando il fatto che un’onda meccanica viene trasportata dal flusso del fluido stesso (il cosiddetto “drift effect”).
Un’onda meccanica si propaga grazie alla vibrazione rispetto a una posizione di equilibrio delle particelle costituenti il mezzo di trasmissione: lo studio dell’onda avviene generalmente per motivi di semplicità utilizzando un sistema di riferimento solidale con il mezzo stesso (ad esempio quando si parla di velocità di un’onda acustica è sottointeso velocità rispetto a un sistema di riferimento solidale con il mezzo di trasmissione).
Se il mezzo si muove rispetto a un osservatore, questi misurerà una velocità di fase dell’onda diversa da quella vista da un osservatore solidale al mezzo di trasmissione: in questo consiste il drift effect.
Ne deriva che il tempo di percorrenza da parte dell’onda dello spazio che separa un emettitore di onde meccaniche dal ricevitore delle stesse onde (si veda la figura 1.4 e l’equazione (1.3), dove d è la distanza fra trasmettitore e ricevitore, c è la velocità dell’onda nel fluido in condizioni di quiete, v è la velocità del fluido e α è l’angolo fra v e d) dipende anche dalla velocità del fluido tra di essi, dall’angolo fra la velocità e la retta ideale che congiunge trasmettitore e ricevitore oltre che dai soliti altri parametri fisici (temperatura, pressione, densità ecc.).
Per essere valida l’equazione (1.3), la velocità deve avere certe caratteristiche (ad esempio avere la stessa direzione in ogni punto): in tal caso la velocità che risulta dalla (1.3) è una media del modulo della velocità del fluido incontrato dall’onda nel suo cammino fra trasmettitore e ricevitore.
figura 1.4: il tempo di volo tra T e R dipende anche da V cos T R d t c v α → = + ⋅ (1.3)
Utilizzando il principio del drift effect (con trasduttori ultrasonici) sono stati realizzati con successo sistemi per le misure di flusso di materia sia gassosa che liquida in generale: flussometri in ambito idraulico [14], per gas domestico [15], per l’aria in ingresso a motori a combustione interna [15], ecc.
Il principio del drift effect sarà utilizzato in questa tesi per ricavare la misura della velocità rispetto al terreno di un oggetto in generale.
Nelle condizioni in cui tutte le particelle dell’aria sono ferme rispetto al terreno, la misura della velocità dell’aria rispetto all’oggetto fornisce la stessa informazione della misura della velocità dell’oggetto rispetto al terreno; la misura della velocità dell’aria si cercherà di ottenerla con un sistema basato sul principio del drift effect.
Dovendo essere il sistema oggetto di questa tesi di basso costo, si è scelto di utilizzare come trasduttori sistemi che lavorano in banda acustica (in sostanza altoparlanti e microfoni) per poter sfruttare i vantaggi derivanti dalla produzione
di massa di questi dispositivi (in sostanza bassissimo costo a fronte di potenza, efficienza e robustezza meccanica).
![tabella 1.1: errore medio sperimentale riportato in [3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/5657786.70820/4.892.159.774.362.576/tabella-errore-medio-sperimentale-riportato-in.webp)
![figura 1.2: immagine del DRS 1000 prodotto dalla GMH Engineering [6]](https://thumb-eu.123doks.com/thumbv2/123dokorg/5657786.70820/6.892.303.632.168.408/figura-immagine-drs-prodotto-gmh-engineering.webp)

![tabella 1.3: specifiche MicroSat prodotto dalla Corrsys-Datron [12]](https://thumb-eu.123doks.com/thumbv2/123dokorg/5657786.70820/9.892.158.777.858.1073/tabella-specifiche-microsat-prodotto-corrsys-datron.webp)
