Capitolo 4: Sensori e misure sui sensori
Introduzione
Requisiti fondamentali di materiali atti a realizzare sensori integrabili in strutture tutt'altro che rigide, come la pelle sintetica, sono: la compatibiltà meccanica del sensore con il substrato dove è deposto, l’adattabilità a forme irregolari, l’attitudine a produrre un’alta densità di sensori.
Molti materiali (plastiche, gomme, fibre di carbonio, etc.) presentano caratteristiche adatte agli scopi suddetti: sono facilmente lavorabili ed hanno robustezza meccanica e proprietà elastiche adeguate.
Alcuni polimeri e materiali plastici compositi hanno capacità intrinseche di trasduzione, che li rendono idonei ad impieghi nel campo del sensing.
La costruzione di un sistema propriocettivo per FACE, oggetto di questa tesi, ha richiesto l’impiego di materiali con qualità appropriate, tali da permettere la conversione di eventi meccanici (il movimento dei muscoli) in segnali di tipo elettrico, quindi di facile acquisizione, memorizzazione ed elaborazione.
È stato, perciò, scelto un composto siliconico piezoresistivo facilmente modellabile e con buona elasticità (basso modulo di Young), che soddisfa i requisiti su menzionati.
Nel capitolo successivo sarà trattato in dettaglio il composto usato per la fabbricazione dei sensori.
4.1 Materiali
I sensori sono oggetti che mutano le loro caratteristiche fisiche in seguito ad uno stimolo ricevuto; questa variazione può essere osservata e misurata.
Diversamente i trasduttori effettuano una conversione, naturalmente con perdite, della forma di energia in ingresso.
Il fenomeno fisico permette di individuare varie tipologie di sensori e trasduttori: piezoresistivo, piezoelettrico, fotovoltaico, magnetoelettrico, piroelettrico, etc. In tabella 4.1 [1] sono riportani alcuni effetti, i parametri fisici accoppiati, esempi di materiali aventi tali effetti e i loro vantaggi e svantaggi:
Effect Coupled Parameters
Rapresentatives
Materials Pros Cons
Silicon Compatibility with VLSI Rigid and fragile Carbon fibres Simple and inexpensive reproducibility Noisy, scarce Piezoresistive Strain-Electrical resistance
Conducting composites Fabrics Intrinsic compliance, easy fabrication Hysteresis, low sensitivity Thermoresistive Temperature- Electrical resistance Sintered ceramic
thermistors High sensitivity
Non-linear response Piezo Strain (stress)-Polarization
High dynamic range, good mechanical properties Lack of DC response Ferroelectric
Pyro Temperature-Polarization
Ferroelectric polymers (PVDF, P(VDF-TrFE)) Stress components selectively sensed, broad frequency response Thermal and mechanical effects are difficult
to separate Thermoelectric
Temperature-Electric
potential Metal thermocouples Easy patterning
Relatively low sensitivity Electrokinetic Strain rate-Electric potential difference
Charged polymer gels
Easy to match compliance of body
tissues
Noisy, inerhently dynamic Magnetoelastic Strain-Magnetic moment
Amorphous ferromagnetic alloys,
metallic glasses
Stress component selectivity is possibile,
good linearity, low hysteresis
Construction of dense arrays is
difficult Photoelastic Stress-Optical birefringence
Photoelastic polymers (polyurethanes, epoxy resins, acrylic resins)
No electrical interferences Narrow dynamic range, construction of dense arrays is difficult Tabella 4.1
I tessuti sensorizzati (fabrics) meriterebbero una complessa trattazione particolare. Qui si possono commentare gli svataggi riportati in tabella 4.1: l’isteresi e la sensibilità si influenzano reciprocamente e non sempre nel modo che si vuole; molta importanza hanno anche i tipi di tessuto usato, che portano a risultati notevolmente diversi.
Altre classificazioni dei sensori sono possibili secondo la grandezza fisica che misurano (temperatura, pressione, concentrazione, etc.) o da un punto di vista energetico (dispositivi attivi o passivi).
4.2 Sensori piezoresistivi
I materiali piezoresistivi hanno la caratteristica di cambiare la propria resistenza elettrica se sottoposti a deformazione meccanica. In particolare i sensori usati rilevano un’estensione e sono perciò comunemente indicati col nome di
strain gauges (estensimetri).
Nell’uso degli estensimetri devono essere considerate due leggi fondamentali: la legge di Hook, per i limiti meccanici di utilizzo, e la funzione di trasduzione.
4.2.1 Legge di Hook
Supponendo il sensore sottoposto ad uno sforzo monodimensionale di trazione o compressione, per una tensione meccanica inferiore ad una soglia
denominata limite elastico, le variazioni di lunghezza possono essere considerate reversibili ed è possibile applicare la legge lineare di Hooke:
l l E T = ⋅∆ T = tensione applicata ⎢⎣⎡ 2⎥⎦⎤ m N l l ∆ = deformazione [µε (microstrain)] E = modulo di Young ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅µε 2 m N
Tensioni oltre la soglia causano una deformazione plastica irreversibile o la rottura meccanica, secondo il tipo di materiale, rendendo inutilizzabile l’estensimetro.
4.2.2 Funzione di trasduzione
La legge che relaziona le grandezze elettriche alle grandezze geometriche è di seguito ricavata alla seconda legge di Ohm:
A l
dove:
R = resistenza [Ω ]
ρ = resistività del materiale [Ω · m] l = lunghezza del materiale [m] A = superficie del materiale [m2]
Differenziando la (4.1) si ha: 2 dl d dA dR l l A A A ρ ρ ρ = + −
dividendo entrambi i membri per R e considerando variazioni piccole ma finite si ha: R l A R l A ρ ρ ∆ =∆ −∆ +∆
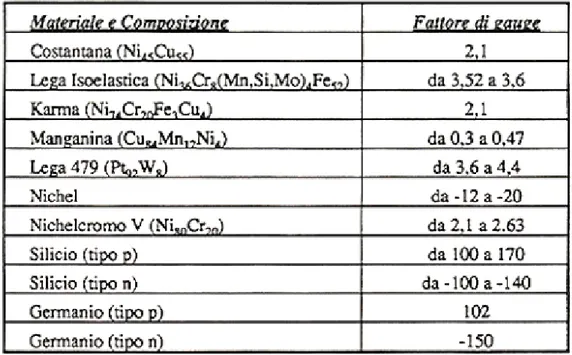
si quantifica così il legame tra le varie grandezze dell’estensimetro. Spesso per gli estensimetri è definito un parametro detto fattore di gauge:
l l R R Gf ∆ ⋅ ∆ = 0 0 [µε (microstrain)]
dove: 0 R R R = − ∆ 0 l l l = − ∆
Questa quantità indica quanto risponde l’estensimetro, in termini di variazione di resistenza, se sottoposto a variazioni di lunghezza.
Comuni strain gauges sono costruiti in metallo, a basso fattore di gauge (tipicamente 2) ed alti limiti di deformazione misurabile (45000µε), o semiconduttore, a fattore di gauge maggiore (100) ma che sopportano deformazioni molto piccole.
4.2.3 Considerazioni sulla deriva termica
Problema tipico nell’uso degli estensimetri è l’influenza della variazione termica del sensore. La resistività, la dimensione, il fattore di gauge sono tutti dipendenti, con diverso peso, dalla temperatura; questa dipendenza, se trascurata, potrebbe falsare le misure, considerando che in alcuni casi l’ordine di grandezza del coefficiente termico del fattore di gauge è lo stesso di quello di espansione cubica (lineare nel caso approssimato degli estensimetri) e, per un metallo tipico, 10 gradi centigradi di variazione termica producono lo stesso effetto di una deformazione di 20000µε.
Per ridurre le non idealità termiche è possibile ricorrere alla configurazione a ponte di Wheatstone con dummy gauge, alla scelta di materiali con basso TCR (coefficiente termico della resistenza), all’incremento del coefficiente convettivo tra sensore ed ambiente circostante, al pilotaggio del sensore tramite impulsi di corrente anziché corrente continua.
Il problema della deriva termica, come descritto nei capitoli successivi, è aggirato: l’informazione è ottenuta da misure differenziali nel tempo e le variazioni termiche dei sensori, date la bassissime correnti circolanti (decine di µA), dipendono in maniera pressochè esclusiva dall’ambiente, quindi sono molto lente e facilmente compensate con un opportuno algoritmo di calibrazione.
Tabella 2: Valori del TCR e del coefficiente di espansione lineare per alcuni materiali
4.3 Metodi di misura della resistenza
L’informazione ricavabile da sensori piezoresistivi risiede nella loro resistenza. È necessario perciò un circuito elettronico in grado di quantificare la resistenza di un bipolo.
Due vie sono percorribili: si alimenta il bipolo a tensione costante nota e si misura la corrente che lo attraversa, applicando la legge di Ohm si ricava la resistenza; l’altro metodo è il duale, si alimenta a corrente costante e si misura la tensione sul bipolo.
Tuttavia, considerando che, note la corrente e la tensione, la resistenza è facilmente ricavabile con la legge di Ohm, il dato fornito dal sistema ed utilizzato è limitato alla sola tensione, senza inutili conversioni per ricavare la resistenza.
4.3.1 Misura a tensione costante
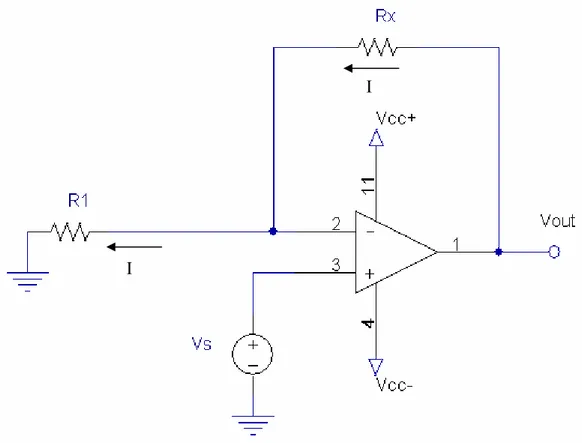
La figura 4.1 illustra un circuito per la misura a corrente costante. La relazione seguente è ricavabile applicando il metodo del corto circuito virtuale e Rx è la resistenza incognita: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⋅ = x s out R R V V 1 2
Figura 4.1: Schema per la misura a tensione costante
Tuttavia esso non è esente da problemi: la tensione Vout serve a stimare Rx,
ma esse sono legate da un’espressione non lineare. E’ necessario un algoritmo di conversione per ottenere Rx.
La configurazione descritta ha un valore massimo di resistenza misurabile inversamente proporzionale alla corrente di offset dell’amplificatore operazionale usato (TΩ), valore ricavabile usando il corto circuito virtuale e considerando che la tensione Vs non può superare quella d’alimentazione. Tuttavia l’amplificatore
transresistivo presenta il vantaggio di avere basse costanti di tempo, poiché la Rx
vede verso il nodo 2 una bassa impedenza e quindi le capacità parassite hanno scarso peso.
4.3.2 Misura a corrente costante
In figura 4.2 è riportato la schema di amplificatore transconduttivo:
I
I
Figura 4.2: Schema per la misura a corrente costante
Per il corto circuito virtuale, la corrente che attraversa Rx è costante e
vale:
0
R V I = s
La relazione tra la tensione in uscita e la Rx è: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⋅ = 1 1 R R V V x s out
la relazione è lineare, ma la resistenza sotto misura è flottante. Le capacità parassite in parallelo a Rx dovute ai cavi di connessione possono influire
sensibilmente sulla costante di tempo.
4.3.3 Soluzione proposta
Il circuito qui scelto è il convertitore tensione-corrente noto come di Howland (figura 4.3).
I
Figura 4.3: Amplificatore transconduttivo di Howland
Calcolando la relazione che lega Vs con I, risulta R1=R3 e R2=R4 affinchè
si abbia:
3
R V I = s
È facilmente calcolabile il massimo carico che il circuito può pilotare. Vale: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⋅ = + 1 2 1 R R V Vout e 3 R V I = s da cui: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = + 1 2 1 R R V V out
ma per non far saturare l’AO:
Vout < Vcc
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + < + 1 2 max 1 R R V V cc si trova così: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + < ⋅ 1 2 3 max 1 R R V R V R s cc s cc V R R R V R 3 1 2 max 1 ⋅ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + <
Il circuito di Howland è abbastanza semplice e con buone caratteristiche, accuratamente simulate e sperimentate durante il dimensionamento.
Soluzioni più semplici a BJT sono possibili, ma le prestazioni in termini di dinamica e deriva termica non sono abbastanza buone.
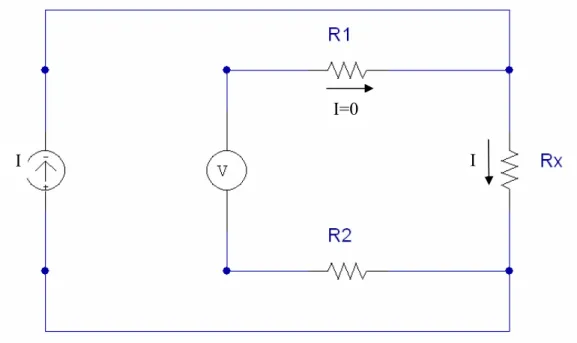
La figura 4.4 mostra il metodo di misura usato, il metodo delle quattro punte:
I=0
I I
Figura 4.4: Schema applicativo del metodo delle quattro punte
Il generatore di corrente indicato con I è l’amplificatore transconduttivo, V rappresenta un circuito con alta impedenza d’ingresso capace di quantificare la tensione presente su Rx senza perturbare sensibilmente la corrente che vi scorre,
R1 e R2 rappresentano le impedenze delle connessioni e dell’ingresso di V.
Nel prototipo realizzato (figura 4.5) la corrente scorre in una serie di sensori S1…Sn; su ognuno di essi è prelevata le tensione da cui è possibile calcolare la resistenza.
I
I=0 I
I