Cap.7 Realizzazione di un sistema per la
modulazione di forma
In questo capitolo si fornirà un esempio pratico di applicazione degli attuatori ad estroflessione, per la modulazione di forma di una superficie elastica appositamente creata. Il supporto e il tipo di materiale prescelti hanno consentito una modulazione ampia ed accurata della superficie, come sarà dimostrato. Inizialmente saranno descritte le configurazioni adottate per i singoli attuatori, in base alle conoscenze fin qui ottenute. In seguito si parlerà di come questi attuatori sono stati disposti per la modulazione e dei materiali utilizzati per simulare una superficie flessibile.
Lo scopo di questo esperimento, obiettivo finale di questa tesi, è dimostrare la validità dell’utilizzo degli attuatori polimerici ad estroflessione per la realizzazione di un sistema per la modulazione di forma.
7.1 Determinazione della configurazione attuativa
I diversi tipi di attuatori proposti, in grado di fornire una grande deformazione e sviluppare una forza adeguata, hanno numerose possibilità di applicazione nella modulazione di una superficie flessibile, come si è cercato di dimostrare.
La scelta dell’attuatore adatto si è dovuta effettuare tra i modelli che meglio rispondevano, relativamente a forza e deformazione, al campo elettrico. Le configurazioni di tali attuatori sono:
a) Polimero al 40%, spessore 1mm, emisfera S4 (altezza 3,1mm, diametro
10mm), vincolo 30mm, elettrodo 30mm;
b) Polimero al 40%, spessore 0,5mm, emisfera S4 (altezza 3,1mm, diametro
10mm), vincolo 30mm, elettrodo 30mm;
c) Polimero al 40%, spessore 1mm, emisfera S30 (altezza 3,1mm, diametro
d) Polimero al 40%, spessore 0,5mm, emisfera S30 (altezza 3,1mm, diametro
30mm), vincolo 30mm, elettrodo 30mm;
e) Polimero al 40%, spessore 1mm, emisfera “a rete”, vincolo 30mm, elettrodo
30mm;
f) Polimero al 40%, spessore 0,5mm, emisfera “a rete”, vincolo 30mm, elettrodo
30mm.
Abbiamo già detto che i dispositivi ai punti c e d sono stati, per il momento, esclusi per la non adeguatezza dei supporti fabbricati. Fra i tipi di attuatori rimanenti notiamo la reintroduzione di quelli a spessore 0,5mm (punto b) in sostituzione delle membrane di spessore 1mm (punto a), in modo da ottenere dispositivi attuabili con tensioni molto più basse (dell’ordine delle decine di kV), innalzabili ai valori opportuni per mezzo dell’amplificatore di tensione descritto nel sottoparagrafo 7.1.1. L’applicazione dei nuovi dispositivi con supporto emisferico “a rete” (punti e e f), la cui idea di base è descritta nel capitolo 8 in relazione agli sviluppi futuri, necessita di ulteriori sperimentazioni, nonostante un prototipo realizzato abbia consentito notevoli deformazioni per membrane sia di 0,5mm che di 1mm di spessore (ved. paragrafo 8.1, caratteristiche del supporto emisferico).
Gli attuatori definitivi per la modulazione della superficie flessibile sono stati scelti di composizione al 40% di plastificante, spessore 0,5mm, supporto emisferico normale, vincolo 30mm ed elettrodo 30mm.
7.1.1 Controllo degli attuatori per mezzo di un
amplificatore di tensione
La scelta dello spessore 0,5mm per i definitivi attuatori adibiti alla modulazione di forma è derivata dal bisogno di controllare l’attuazione con tensioni applicate relativamente basse.
In tal modo è stato possibile modulare una superficie flessibile attraverso l’utilizzo di un generatore di tensione continua, che manda in ingresso ad un amplificatore un voltaggio limitato e inferiore, convenientemente, a 10V.
L’amplificatore è caratterizzato da un guadagno massimo 1000 rispetto alla tensione fornita in ingresso. E’ stato osservato, parallelamente, che l’elettronica di questo dispositivo era di gran lunga migliore del generatore di tensione continua utilizzato precedentemente, tale da consentire una risposta più veloce in carica e scarica, quindi nell’attivazione e successiva disattivazione degli attuatori polimerici. I dispositivi sollecitati, poi, se scaricati correttamente e in modo continuo dimostrano un ritorno alla posizione iniziale nettamente maggiore rispetto ai casi osservati in precedenza. Gli esperimenti svolti in quest’ultima fase hanno dimostrato, quindi, che gli attuatori a polimeri elettroattivi nella configurazione ad estroflessione possono rispondere al campo elettrico applicato con una buona risposta dinamica (banda 8-10Hz), in accordo a quanto dimostrato precedentemente per la configurazione planare.
7.2 Modulazione di una superficie flessibile
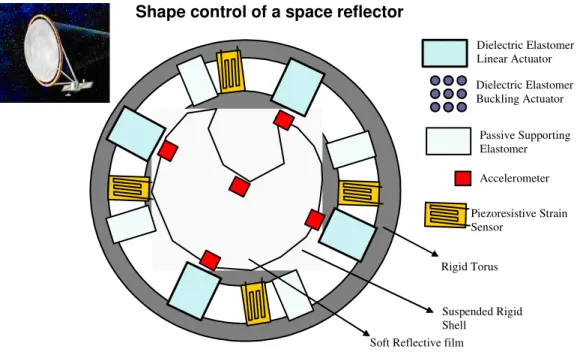
Lo scopo di questo esperimento è quello di dimostrare che una superficie elastica o costituita da numerose sub-unità rigide sia controllabile per mezzo di attuatori polimerici ad estroflessione, in modo da ottenere cambiamenti conformazionali utili ad uno scopo ben preciso, sia esso la locomozione di un oggetto con un assetto particolare, l’afferraggio di oggetti o l’orientazione di un dispositivo in modo da massimizzare la sua funzione in relazione ad un determinato ambiente. E’ in corso di studio il progetto di un riflettore parabolico a convessità variabile, per applicazioni spaziali. L’idea di utilizzare attuatori ad estroflessione deriva dalle esigenze di basso peso richieste per tale applicazione.
Il riflettore presuppone uno strato di materiale riflettente, flessibile, modulato da attuatori ad estroflessione, vincolato ad un anello rigido sospeso ad un sostegno toroidale per mezzo di tiranti. Tali tiranti sono in parte in materiali elastomerici passivi, e in parte in materiali elastomerici attivi, in particolare attuatori a polimeri elettroattivi lineari, il cui sviluppo è in corso di svolgimento presso il Centro Piaggio. Il grado di allungamento dei tiranti è controllato per mezzo di sensori piezoresisitivi. La modulazione di forma della superficie centrale flessibile e riflettente è conseguenza dell’estroflessione di un gran numero di attuatori posizionati al di sotto di essa in una configurazione conveniente per ottenere la più alta risoluzione di controllo possibile. La convessità dello specchio parabolico è governata, invece, da attuatori lineari che, agendo sull’anello di sostegno della superficie, influiscono
`` Dielectric Elastomer Linear Actuator Dielectric Elastomer Buckling Actuator
Rigid Torus
Soft Reflective film
Suspended Rigid Shell Passive Supporting Elastomer Accelerometer Piezoresistive Strain Sensor
Shape control of a space reflector
Per dimostrare le potenzialità degli attuatori polimerici, sfruttando le capacità che gli studi fin qui effettuati hanno confermato, si è pensato di simulare un sistema per la modulazione di una superficie che si basi su tali dispositivi. I risultati ottenuti da questi primi studi potranno essere la base per la realizzazione dello shape control del riflettore spaziale sopra descritto.
L’applicazione, al momento, è fornita in via generale utilizzando superfici di prova fabbricate per l’esperimento. Come è stato detto, la modulazione di altri tipi di superfici deve derivare da uno studio approfondito sulle caratteristiche del dispositivo a cui la modulazione viene applicata. Da tali studi si può determinare quale sia la configurazione ottimale da implementare per avere un’alta risoluzione di controllo. I dati ottenuti da questi esperimenti possono essere utilizzati per determinare il comportamento di più attuatori ad estroflessione soggetti ad un carico, con lo scopo di ottenere il maggior numero di modulazioni della superficie, come conseguenza dell’attuazione contemporanea o meno di uno più dispositivi interessati da campi elettrici opportunamente imposti per consentire i cambiamenti conformazionali prestabiliti.
Essendo questo il primo esperimento di modulazione di forma attraverso attuatori ad estroflessione, è stata privilegiata la semplicità realizzativa sia della superficie elastica che del dispositivo per la modulazione il quale presuppone, al momento, nove unità attuative.
7.2.1 Scelta della superficie per la simulazione
Una delle superfici elastiche da modulare è stata realizzata con lo stesso materiale utilizzato per la fabbricazione degli attuatori. A differenza del silicone delle membrane, però, nella composizione non è stato inserito il plastificante. Il motivo di questa scelta era ottenere un materiale, come detto, del tutto elastico e facilmente modulabile, ma assolutamente non appiccicoso, per evitare che la superficie stessa introducesse un ulteriore problema per l’attuazione.
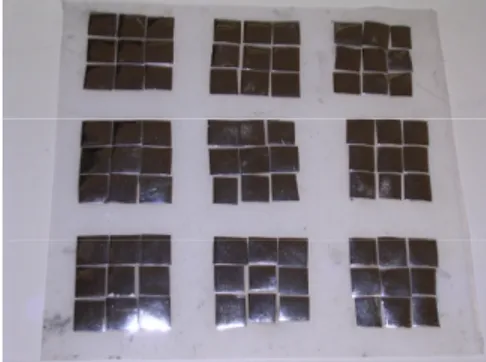
Per la fabbricazione della superficie è stato utilizzato un contenitore di plastica in cui è stata inserita una quantità di silicone sufficiente per realizzare uno strato di circa 1mm di spessore. Successivamente sono state applicate sul silicone un certo numero di superfici quadrate lucide di 10mm di lato, per realizzare una simulazione di una superficie riflettente utilizzabile per l’applicazione descritta (Fig. 7.2).
In seguito, per migliorare il rendimento della modulazione evitando di appesantire la struttura, è stata utilizzata una superficie in Mylar delle dovute dimensioni. Il materiale utilizzato garantiva basso peso e alta possibilità di orientazione. Il problema riscontrato in una prima fase era relativo all’attrazione elettrostatica tra gli elettrodi e il Mylar, che portava ad una modulazione errata. Una soluzione a questo problema e la successiva introduzione di un nuovo tipo di superficie verranno descritte nei paragrafi seguenti.
Parallelamente è stato utilizzato un tessuto di paillettes, leggero, deformabile e adatto alla simulazione da eseguire per la presenza di dischi riflettenti sopra di esso.
Fig. 7.2: Superficie di silicone flessibile con superfici riflettenti applicate
7.2.2 Configurazione del dispositivo per la modulazione
di forma
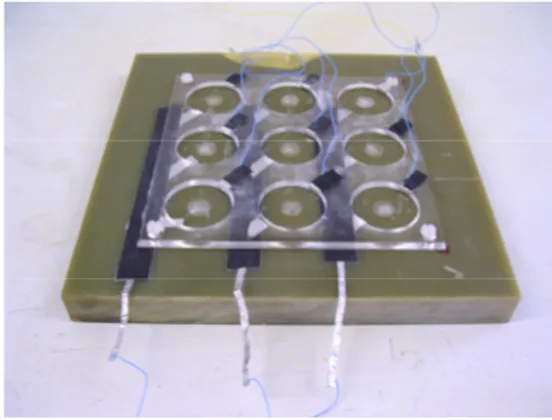
Il dispositivo per la modulazione di forma è costituito da nove attuatori singoli disposti su una matrice 3x3. Le membrane polimeriche sono state realizzate con silicone al 40%, e su di esse sono stati applicati elettrodi di 30mm. Il sostegno emisferico è quello previsto dalla configurazione con sfera, nonostante sia stato realizzato anche un dispositivo a rete. I vincoli sono dovuti alla presenza di una maschera in policarbonato con nove fori nelle opportune posizioni. Tale maschera è stata ridotta di spessore nella seconda fase degli esperimenti (da 3mm a 1mm), per sfruttare maggiormente l’estroflessione di ciascun attuatore per la modulazione di forma. Per il controllo degli attuatori, e quindi della superficie, sono stati realizzati sulla maschera dei contatti dedicati,
realizzati con fili di rame e un nastro di alluminio conduttivo, per ogni singolo dispositivo. I contatti con il terminale di terra del generatore sono stati realizzati, invece, esclusivamente per mezzo del nastro, collegando gli elettrodi inferiori di ciascun attuatore.
In questo modo è stato proposto un congegno che affianca nove attuatori su
un’area di lavoro di 140x140mm, con la possibilità di modulare la superficie delle dovute dimensioni con l’attivazione singola o contemporanea dei dispositivi di attuazione.
Per ottenere la modulazione, la superficie è stata posizionata al di sopra degli attuatori in modo da coprire tutta l’area interessata.
Non sono stati previsti, al momento, essendo questo meccanismo ancora un prototipo, vincoli che impediscano il distacco della superficie dal piano.
La matrice di attuazione con nove attuatori ad estroflessione è visibile in figura 7.3. Una nuova configurazione del sistema per la modulazione di forma è in corso di studio in laboratorio. Tale dispositivo prevede un assetto con un certo numero di attuatori posizionati su due circonferenze concentriche, ma che differiscono per l’altezza della base di appoggio degli attuatori. In particolare gli attuatori esterni sono
Fig. 7.3: Matrice di attuazione 3x3 con supporti emisferici e contatti dedicati
posizionati su uno spessore aggiuntivo, consentendo un guadagno iniziale in altezza rispetto agli attuatori centrali nella condizione di non attività. Questa configurazione permette di realizzare un sistema a simmetria centrale, con una convessità che all’occorrenza può essere variata, in grado di riprodurre maggiormente la particolare forma del riflettore spaziale.
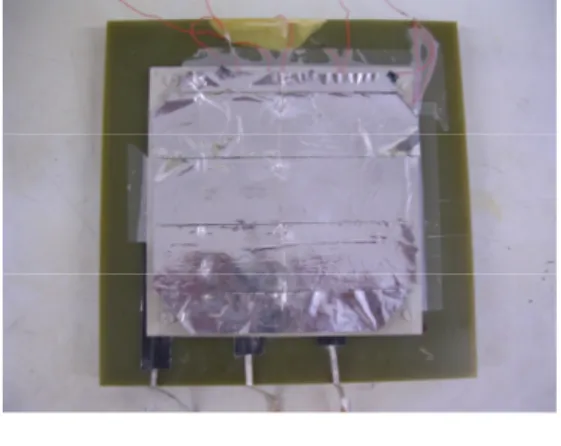
La configurazione descritta ha determinato l’introduzione di un nuovo tipo di superficie per la simulazione, costituito da un foglio di acetato di opportuno spessore, sul quale è stato incollato un foglio di Mylar riflettente. La superficie, più rigida fra quelle presentate finora, consente una modulazione più omogenea dell’area che compete a ciascun attuatore, accentuando la variazione di convessità richiesta per il riflettore.
7.3 Discussione
Le prove effettuate sulle diverse superfici hanno portato a risultati differenti. La superficie di silicone, sebbene rispondesse elasticamente in modo opportuno, si è rivelata troppo pesante per consentire una grande estroflessione degli attuatori e quindi una corretta modulazione della superficie stessa. Da ciò è derivato il bisogno di alleggerire la struttura fabbricando uno strato di silicone omogeneamente sottile in modo da favorire lo shape control. Parimenti le modulazioni che si sono ottenute lasciano spazio ad altre configurazioni attuative, ad esempio con più attuatori, per la modulazione di una superficie di pari peso (circa 26-27g).
L’utilizzo di un foglio di Mylar, perfettamente rispondente ai requisiti di bassissimo peso, non ha determinato risultati soddisfacenti in quanto erano numerosi i fattori di disturbo per la modulazione. Il materiale, infatti, costituito da uno strato superiore conduttivo e uno strato inferiore non conduttivo, presentava forti fenomeni di attrazione elettrostatica con gli elettrodi superiori e con il vincolo di policarbonato in fase attiva. In seguito a tale attrazione, una particolare modulazione poteva essere comunque osservata. I problemi relativi all’accumulo di cariche sul materiale sono stati in seguito risolti utilizzando come accorgimento la connessione a terra dello strato conduttivo, dopo aver abbinato, come detto, la superficie in Mylar ad foglio sottile di acetato.
L’utilizzo del tessuto di paillettes ha consentito uno shape control ottimale dal punto di vista della modulazione ottenuta. Tale superficie, non essendo rigida e non
fino all’introduzione del materiale composto dal doppio strato acetato-Mylar, più rispondente alle caratteristiche ricercate per il controllo di forma del riflettore spaziale. La scelta di questo tipo di questo tipo di materiale evita che le zone fra un attuatore e l’altro siano interessate da avvallamenti della superficie stessa, cosa che accadeva utilizzando il tessuto, che portano ad una disomogeneità del riflettore in quei punti.
Le prove di modulazione miravano ad osservare i modi in cui la superficie poteva essere modulata, in relazione all’attivazione di precise postazioni attuative sottostanti ad essa. Visto il basso numero di dispositivi per la modulazione (nove, come detto), le possibilità di attivazione erano alquanto ridotte: sono stati sottoposti a stimolo elettrico, contemporaneamente, gli attuatori della “corona” (otto attuatori, escluso il centrale), e le varie righe e colonne della matrice.
In questo modo è stato possibile osservare i movimenti della superficie resa attiva rispetto alla parte non modulata dai dispositivi sottostanti. La sollecitazione della corona, in particolare, è stata effettuata per evidenziare le affinità della posizione raggiunta con la forma parabolica del riflettore spaziale prima descritto, in modo da variare, nei casi previsti, la sua convessità in relazione alla fase attiva, passiva o intermedia degli attuatori presenti, a seconda della modulazione finale da ottenere. L’obiettivo di ottenere una superficie di forma parabolica adatta all’applicazione per il riflettore spaziale ha portato all’idea di realizzare la seconda configurazione del sistema di modulazione. L’utilizzo di due circonferenze concentriche realizza istantaneamente la simmetria radiale richiesta per l’applicazione descritta. La convessità iniziale è determinata, parallelamente, dall’esistenza di un differente piano di appoggio per gli attuatori della corona esterna rispetto a quelli centrali. In fase attiva, poi, tale convessità può essere accentuata attivando esclusivamente gli attuatori della corona, o diminuita, attivando gli attuatori centrali. L’attivazione di tutti i dispositivi, però, non porterebbe ad una modulazione ma ad una traslazione globale della superficie riflettente, inadatta per l’applicazione. E’ stato pensato di attivare gli attuatori della circonferenza esterna con tensioni maggiori, così da ottenere la forma
Fig. 7.4: Superficie flessibile in Mylar e acetato posizionata sul sistema per la modulazione di forma
parabolica richiesta. Le diverse tensioni di applicazione potrebbero essere ottenute utilizzando altrettanti generatori di d.d.p. oppure collegando gli attuatori in un circuito che sfrutti le loro impedenze per realizzare dei partitori di tensione opportuni.
Altri esperimenti dovranno essere eseguiti su questa seconda configurazione, per stabilire quali obiettivi di modulazione possano essere così raggiunti.