110
Conclusioni
8.1 Conclusioni generali
Lo scopo che ci è posto all’inizio di questa tesi (Capitolo1) è quello di sviluppare una tecnica per la classificazione automatica di bersagli radar. Per fare ciò si è utilizzata la tecnica SVM con diversi set di features, cercando di capire quali conducano a performance migliori e più stabili.
Questo tipo di scelta è nata da un intensa analisi bibliografica sia nel campo del Pattern Recognition [1-4], [30]-[33], che più in particolare nel campo dell’ATR [5-15], [19-29], [35] dove l’SVM è presentata come una tecnica innovativa di classificazione rispetto alle altre descritte per sommi capi nel capitolo 2.
Nel capitolo 3 sono stati descritti a livello teorico i fondamenti matematici dell’SVM lineare binaria e le possibili estensioni al caso multiclasse e all’utilizzo di kernel non lineari. Questo risulta essenziale per progettare un sistema ATR.
Nel capitolo 4 è stato sviluppato un metodo nuovo di estrazione delle features che consente il confronto tra sistemi polarimetrici e scalari. Questo metodo è stato poi messo a confronto con due altre tecniche già note.
Nei capitoli 5-6 sono stati riportati i risultati degli esperimenti di classificazione SVM binaria e multiclasse, effettuati su dati ottenuti utilizzando il simulatore EMviroment sviluppato all’interno del Dip. di Ing. Dell’Informazione; questo ci ha permesso di testare il funzionamento dell’SVM basata sui dati frequenziali e di metterle a confronto con altre tecniche di estrazione delle features. La tecnica si è mostrata efficace sia nel caso binario che nel caso multiclasse e anche robusta nei confronti di bersagli sconosciuti.
A questo punto, visto gli ottimi risultati ottenuti in condizioni ideali, si è provato ad estendere la tecnica a possibili variazioni in aspetto del bersaglio. Ciò è stato possibile grazie all’utilizzo di dati radar ottenuti in camera anecoica presso il centro CEPAMIR di Adelaide.
Nel capitolo 7 infine sono stati raccolti gli esperimenti svolti per testare la robustezza del classificatore; in particolare è stato descritto un esperimento di classificazione effettuato su dati radar reali multiaspect ed è stato effettuato un confronto tra il classificatore che utilizza le features spettrali e quello che utilizza invece i profili polarimetrici in range [8].
111 A seguito degli sudi e degli esperimenti effettuati si possono a questo punto trarre le seguenti conclusioni:
• L’SVM è una tecnica di classificazione adatta quando si ha disposizione un numero ridotto di dati di training per effettuare l’allenamento del classificatore.
• L’SVM è una tecnica di classificazione adatta per trattare problemi di classificazione in spazi ad elevata dimensione, in quanto la complessità computazionale dell’algoritmo non aumenta all’aumentare del numero di features utilizzate.
• L’SVM basata sulle features estratte dalla matrice di covarianza polarimetrica non offre buone performance nel momento in cui ci si allontana dalla condizioni di training; perciò sono state introdotte nuove tecniche di estrazione delle features con ridotta perdita di informazione, tenendo presente che, come abbiamo visto, la complessità non aumenta col numero delle features usate per la classificazione. Per questo motivo vale la pena lavorare in spazi di features ad elevata dimensione, senza comprimere troppo l’informazione originaria.
• Utilizzando le features di ampiezza spettrale di scattering si risolve il problema della tecnica precedente nel senso che allenando l’SVM con un certo SNR, quando poi si va a testare il classificatore con un SNR maggiore, la probabilità di errore non aumenta come succedeva in precedenza, ma tende asintoticamente ad un valore costante. Questa tecnica risulta inoltre robusta al fenomeno di shift circolare in quanto utilizza direttamente i dati frequenziali.
• L’estensione al caso multiclasse è stata implementata con la tecnica OAO; l’utilizzo di questa tecnica non ha mostrato per un numero di classi uguale a 9, sensibili inconvenienti sia per quanto riguarda il tempo di calcolo che per le performance di classificazione. Ciò nonostante utilizzando il training multiaspect non sono garantite buone performance rispetto all’identificazione di bersagli sconosciuti.
• L’SVM basata sui profili polarimetrici ad alta risoluzione offre performance migliori della tecnica basata sulle features di ampiezza spettrale di scattering, ma solo nel caso in cui non si è in presenza di shift circolare ovvero nel caso in cui la finestra centra perfettamente il profilo del bersaglio.
• L’SVM basata sulle features di ampiezza spettrale di scattering risulta inoltre più conveniente da un punto di vista economico in quanto, non avendo bisogno dell’informazione di fase, potrebbe essere impiegata, a differenza della tecnica basata
112 sui profili HRR, con un radar incoerente. Nella tecnica che utilizza i HRRP viene effettuata infatti la trasformata veloce di Fourier (IFFT) dei dati frequenziali e per fare ciò è necessario avere a disposizione un radar coerente che conserva l’informazione di fase dell’eco ricevuto.
8.2 Conclusioni particolari
Nell’implementazione dei classificatori, oltre all’impiego o meno di diversità di polarizzazione, sono possibili diverse varianti nella scelta del kernel e condizioni di training. In tutto le varianti risultano 48 (3 sistemi, 4 diversi valori di ρ, 2 kernel, e due condizioni di allenamento).
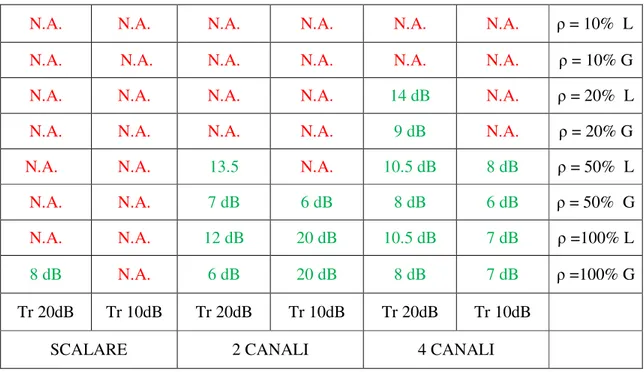
Abbiamo calcolato per tutti i casi, dalle performance dei nostri classificatori, l’intercetta tra il valore di probabilità di errore 10% e l’SNR di test (Fig. 8.1). I valori N.A. (non affidabile) rappresentano i classificatori che non raggiungono questa condizione. In questo modo è possibile valutare dei guadagni di processing tra diverse implementazione dell’SVM.
Nella tabella che segue sono confrontate per ogni sistema e valore di ρ, 4 condizioni diverse; risulta di interesse comprendere quali varianti conducono alle performance migliori nel caso in cui il classificatore risulti affidabile.
N.A. N.A. N.A. N.A. N.A. N.A. ρ = 10% L
N.A. N.A. N.A. N.A. N.A. N.A. ρ = 10% G
N.A. N.A. N.A. N.A. 14 dB N.A. ρ = 20% L
N.A. N.A. N.A. N.A. 9 dB N.A. ρ = 20% G
N.A. N.A. 13.5 N.A. 10.5 dB 8 dB ρ = 50% L
N.A. N.A. 7 dB 6 dB 8 dB 6 dB ρ = 50% G
N.A. N.A. 12 dB 20 dB 10.5 dB 7 dB ρ =100% L
8 dB N.A. 6 dB 20 dB 8 dB 7 dB ρ =100% G Tr 20dB Tr 10dB Tr 20dB Tr 10dB Tr 20dB Tr 10dB
SCALARE 2 CANALI 4 CANALI
113 Dalla tabella 8.1 si evince in primo luogo che più alto è il numero di canali utilizzato e più il sistema è affidabile. In altre parole la polarimetria risulta necessaria per sviluppare un sistema ATR-HRR con un numero elevato di classi, tra i sistemi polarimetrici il 4 canali risulta il più affidabile, a differenza di quanto si era visto con i dati simulati.
In secondo luogo si può valutare l’affidabilità del classificatore al variare della densità di dati di training ρ e del kernel utilizzato. In particolare risulta che:
• Con ρ di 10% non si ottengono risultati affidabili;
• Pretendere un ρ unitario risulta difficile da un punto di vista operativo;
• Con un ρ del 20% risulta affidabile il full polarimetrico allenato a 20 dB; l’utilizzo di un Kernel Gaussiano apporta un guadagno di 5 dB.
• Con un ρ del 50% i sistemi polarimetrici risultano affidabili e l’utilizzo del Kernel gaussiano è in grado di apportare un guadagno di processing di alcuni dB.
Per quanto riguarda il comportamento delle performance al variare delle condizioni di allenamento del classificatore possiamo trarre le considerazioni seguenti: in generale l’andamento delle prestazioni manifestano una curva ad S, in un primo tratto la probabilità di errore è 1 1
classi N
− , ovvero il risultato della classificazione è completamente casuale, poi si assiste ad una fase di transizione in cui le performance migliorano fino ad arrivare ad un punto critico in cui tendono a stabilizzarsi. Il punto critico per un classificatore affidabile esprime il possibile range di funzionamento.
Si sono testate 2 condizioni generali di allenamento, 20 dB e 10 dB di SNR:
• Allenando la rete in condizioni di elevato SNR (20 dB) si ottiene in generale un buon comportamento in termini di affidabilità e stabilità di tutti i classificatori.
• Allenando la rete invece in condizioni più avverse, vicino al punto critico di funzionamento, si può ottenere un guadagno di 2-3 dB. Ad esempio allenando il classificatore 4 canali a 10 dB, si ottiene un abbassamento del punto critico da 10.5 a 8 dB. In altre parole l’allenamento del classificatore a 10 dB ha mostrato dei vantaggi se e solo se il punto critico è minore o uguale a 10 dB.
114
8.3 Possibili sviluppi futuri
Visto i risultati interessanti ottenuti grazie all’impiego dell’SVM, si è pensato ai seguenti possibili sviluppi futuri:
• Analisi del funzionamento del classificatore in presenza di disturbo non ideale (Clutter, rumore colorato, Jammer, Chaff);
• Validazione della tecnica con l’utilizzo di dati reali con una variazione di aspect maggiore, bande differenti da quella X, larghezza di banda più ridotta e possibilmente relativi a bersagli man-made estesi (navi, aerei).
• Estensione della tecnica e verifica della robustezza nel caso di immagini bidimensionali (SAR, ISAR) e confronto con il caso 1-D.
• Analisi approfondita delle performance descritte nel capitolo 7.5 utilizzando kernel diversi e un numero di classi variabile.
• Confronto dell’SVM con la tecnica Nearest Neighbour.