Capitolo 4
Ottimizzazione di singole curve
Il primo processo di ottimizzazione sviluppato ha riguardato la ricerca del-la traiettoria ideale in una singodel-la curva. Sono stati sviluppati cinque tipi differenti di curve, che sono rappresentative di un ampio campo di tracciati possibili. Le curve oggetto dello studio sono le stesse portate come esempio nel paragrafo 1.4. Si tratta di una curva a 90 gradi con ampio raggio di curvatura, una chicane destra-sinistra, un tornante, una curva con raggio di curvatura crescente ed una con raggio di curvatura decrescente.
Prima dell’inserimento in curva è stato inserito un tratto in rettilineo lungo 120 metri. In questo modo è possibile imporre come velocità iniziale, all’inizio di tale rettilineo, quella massima consentita dal veicolo. Tale spazio è infatti sufficiente ad affrontare le curve con qualsiasi velocità in ingresso. Imponen-do tale condizione è possibile confrontare i tempi ottenuti per affrontare una curva con traiettorie differenti.
4.1
Curva a 90 gradi
4.1.1
Modellazione del problema
La prima curva analizzata è una curva a raggio costante pari a 180 metri. La larghezza della corsia, come già scritto in precedenza, è posta pari a tre metri.
4.1 Curva a 90 gradi
I punti di passaggio per il tracciamento della spline interpolante sono stati imposti nel modo seguente
• 4 punti posti sul rettilineo d’ingresso ad una distanza variabile tra i 50 ed i 30 metri dall’inizio della curva, ed assegnati in modo da generare un tracciato rettilineo, variabile all’interno della corsia. In tale modo è possibile riprodurre la condizione di partenza, ovvero con curvatura nulla su strada rettilinea.
• 5 punti posti su altrettante perpendicolari al tracciato stradale, ovvero uno ogni 22,5 gradi.
• 4 punti posti sul rettilineo in uscita, in modo analogo al rettilineo in ingresso.
La traiettoria risultante è quindi tracciata attraverso l’interpolazione di 13 punti, generando, come enunciato nel paragrafo 2.3, una spline del quarto ordine composta da 9 tratti.
La curvatura di tale tracciato, calcolata dal centro della corsia, risulta pari a
0.00556 m−1. Con tale valore, dalla figura 2.7, è possibile ricavare la
dimen-sione del passo d’integrazione necessario al calcolo del tempo di percorrenza con la precisione del centesimo di secondo. In questo caso è necessario una dimensione del ∆s pari a 0.55 m, a cui corrisponde un tempo di calcolo di circa 40 secondi per ogni traiettoria.
4.1.2
Ottimizzazione
Il numero di variabili da ottimizzare con l’algoritmo sviluppato è in questo caso pari a 7, ovvero la posizione radiale dei 5 punti posti all’interno della curva più altre 2, legate alla posizione nel tracciato dei quattro punti posti nel rettilineo d’ingresso e di quelli posti sul rettilineo d’uscita.
Come già accennato in precedenza, a causa dei lunghi tempi di calcolo legati alla limitata dimensione del passo d’integrazione, non è possibile procedere al
4.1 Curva a 90 gradi
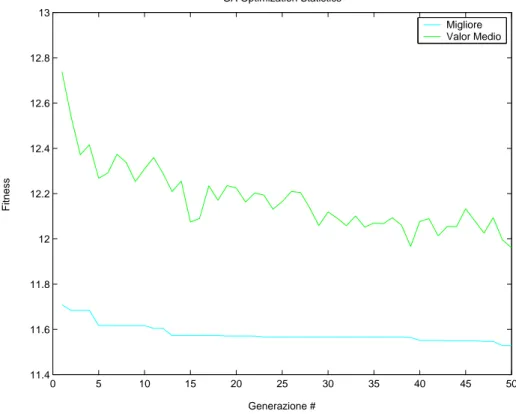
quindi ad un primo processo di ottimizzazione con un passo d’integrazione più ampio, circa 2 metri, operante su una popolazione di 100 individui e sviluppato per 50 generazioni. I restanti parametri caratteristici dell’algo-ritmo genetico sono quelli esposti nel paragrafo 3.8. Tale operazione pre-liminare, operante su un totale di 5000 traiettorie ha richiesto un tempo di calcolo di circa un ora. E’ mostrato in figura 4.1 l’andamento del processo di ottimizzazione, è possibile notare come al crescere del numero di genera-zioni la media della fitness della popolazione tenda al valore dell’individuo migliore, e la deviazione standard della stessa tenda a zero. Il risultato
ot-0 5 10 15 20 25 30 35 40 45 50 11.4 11.6 11.8 12 12.2 12.4 12.6 12.8 13 GA Optimization Statistics Fitness Generazione # Migliore Valor Medio
Figura 4.1: Andamento dell’algoritmo di ottimizzazione
tenuto da questo primo processo di ottimizzazione è stato utilizzato come base di partenza per un successivo processo di ottimizzazione, utilizzando la dimensione del passo d’integrazione che garantisca la convergenza. Infatti, in questa seguente ottimizzazione, il campo di variazione delle sette variabili
4.1 Curva a 90 gradi
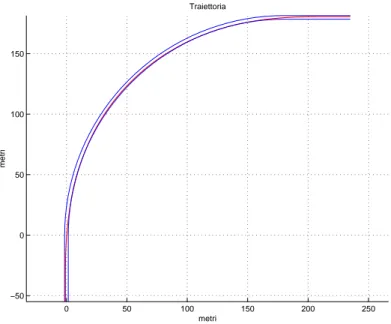
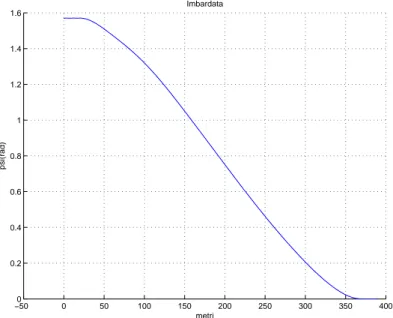
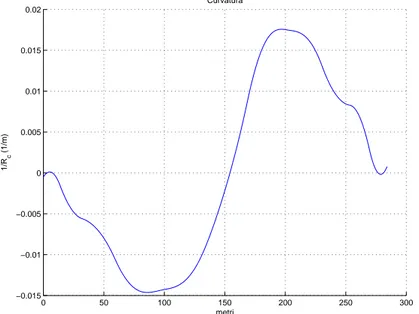
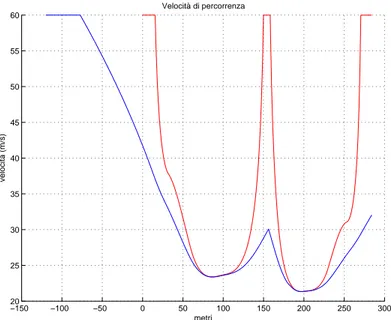
è stato posto pari a 0.2 a cavallo della soluzione ottenuta dalla prima ot-timizzazione. Ciò corrisponde ad limitare la possibile posizione dei punti di passaggio ad un quinto della corsia. In questo modo è stato possibile analiz-zare un numero sensibilmente inferiore di curve. In particolare si è analizzata una popolazione di 20 individui nel corso di 20 generazioni, con un tempo di calcolo pari a 3h 30min. I risultati ottenuti sono riportati nelle figure seguen-ti. Nelle figure 4.3 e 4.4 sono riportate la traiettoria e la curvatura risultanti dal secondo processo di ottimizzazione. Nella figura 4.5 è rappresentata la velocità effettiva del veicolo (curva blu), confrontata con la velocità massi-ma definita nel paragrafo 2.2. Infine in figura 4.6 è riportato l’andamento dell’angolo d’imbardata del veicolo definito come
ψ(s) = arctan y
′(s)
x′(s) (4.1)
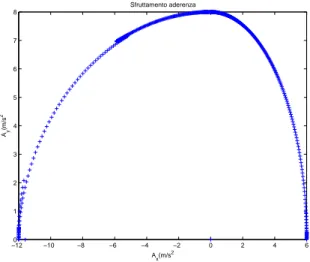
Il valore del tempo di percorrenza è pari a 11.49 secondi, che corrisponde ad una velocità media pari a 44.3 m/s. In figura 4.2 è mostrato l’andamento delle accelerazioni. Risulta evidente come tali accelerazioni rimangano sulla frontiera dell’ellisse d’aderenza mostrato in figura 2.2, ed utilizzato per il processo di ottimizzazione. −120 −10 −8 −6 −4 −2 0 2 4 6 1 2 3 4 5 6 7 8 Ax(m/s2 Ay (m/s 2 Sfruttamento aderenza
4.1 Curva a 90 gradi 0 50 100 150 200 250 −50 0 50 100 150 Traiettoria metri metri
Figura 4.3: Traiettoria ottima in una curva a raggio costante pari a 180 metri 0 50 100 150 200 250 300 350 400 −6 −5 −4 −3 −2 −1 0 1x 10 −3 Curvatura metri 1/R c (1/m)
4.1 Curva a 90 gradi −200 −100 0 100 200 300 400 35 40 45 50 55 60 Velocità di percorrenza metri velocità (m/s)
Figura 4.5: Velocità del veicolo nella percorrenza della traiettoria ottima
−500 0 50 100 150 200 250 300 350 400 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 Imbardata metri psi(rad)
Figura 4.6: Andamento dell’angolo d’imbardata nella percorrenza della
4.2 Chicane
4.2
Chicane
4.2.1
Modellazione del problema
La seconda curva analizzata è una chicane composta da una prima curva a destra, con uno sviluppo di 90 gradi, con raggio di curvatura pari ad 80 metri ed una seconda curva a sinistra, con analogo sviluppo, con raggio pari a 60 metri. Anche per questa curva la dimensione della corsia è posta pari a 3 metri.
L’imposizione dei punti di passaggio in questa curva è stata impostata nel modo seguente
• 4 punti sul rettilineo d’ingresso come nella curva precedente. • 7 punti posti lungo le due curve (uno ogni 30 gradi).
• 4 punti posti sul rettilineo d’uscita.
La generica traiettoria è quindi rappresentata con una spline del quarto or-dine composta da 11 tratti.
La curvatura massima calcolata nel centro corsia si realizza chiaramente nella
seconda curva, ed è pari a 0.01667 m−1. Con tale valore della curvatura, il
passo d’integrazione necessario alla convergenza, è pari a 0.31 m. Il tempo necessario al calcolo di una traiettoria con tale passo d’integrazione è pari a circa 2min 30sec.
4.2.2
Ottimizzazione
Con il tipo di rappresentazione descritto in precedenza il numero di variabili da ottimizzare risulta pari a 9.
Come nel caso precedente si è proceduto ad una prima ottimizzazione con un passo d’integrazione pari a circa 2 metri, operante con popolazione di 100 individui attraverso 50 generazioni ed a partire da tale risultato si è proceduto ad una successiva ottimizzazione, con passo d’integrazione che garantisca la convergenza, con un campo di variazione delle variabili pari ad un quinto
4.2 Chicane
della corsia disponibile. Per tale successiva operazione si è analizzata una popolazione di 15 individui per 15 generazioni, con un tempo di calcolo pari a 10h 45min. Nelle figure successive sono mostrati i risultati ottenuti al termine di questo processo di ottimizzazione. Il tempo di percorrenza della traiettoria ottima è pari a 13.16 secondi a cui corrisponde una velocità media di 30.71 m/s.
4.2 Chicane −50 0 50 100 150 200 −20 0 20 40 60 80 100 120 140 160 Traiettoria metri metri
Figura 4.7: Traiettoria ottima in una chicane destra-sinistra di raggi pari a 80 e 60 metri rispettivamente 0 50 100 150 200 250 300 −0.015 −0.01 −0.005 0 0.005 0.01 0.015 0.02 Curvatura metri 1/R c (1/m)
4.2 Chicane −150 −100 −50 0 50 100 150 200 250 300 20 25 30 35 40 45 50 55 60 Velocità di percorrenza metri velocità (m/s)
Figura 4.9: Velocità del veicolo nella percorrenza della traiettoria ottima
−500 0 50 100 150 200 250 300 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 Imbardata metri psi(rad)
Figura 4.10: Andamento dell’angolo d’imbardata nella percorrenza della traiettoria ottima
4.3 Tornante
4.3
Tornante
4.3.1
Modellazione del problema
Il tornante rappresentato ha un raggio di curvatura, calcolato a metà corsia, pari a 40 metri, la corsia è ampia 3 metri, mentre i punti interpolanti sono stati assegnati nel modo seguente
• 4 punti sul rettilineo d’ingresso.
• 7 punti nello sviluppo della curva (uno ogni 30 gradi). • 4 punti sul rettilineo d’uscita.
Come nel caso precedente, la spline risultante dall’interpolazione di tali punti è composta da 11 tratti.
La curvatura massima è pari a 0.025 m−1, che corrisponde ad una
dimen-sione del passo d’integrazione pari a 0.25 m. Con tale dimendimen-sione il tempo necessario al calcolo di una singola traiettoria è pari ad oltre 5 minuti.
4.3.2
Ottimizzazione
Analogamente al caso precedente sono 9 le variabili da ottimizzare e si è proceduto ugualmente ad un doppio processo di ottimizzazione con le stesse caratteristiche di quello effettuato nel caso precedente. La seconda ottimiz-zazione in questo caso è stata effettuata su una popolazione di 10 individui per 10 generazioni per limitare il tempo di calcolo a 9h 30min. Il tempo di percorrenza ottenuto è pari a 12.43 secondi che corrispondono ad una velo-cità media pari a 27.72 m/s. Nelle figure seguenti sono mostrati i risultati ottenuti al termine dell’ottimizzazione.
4.3 Tornante −10 0 10 20 30 40 50 60 70 80 90 −50 −40 −30 −20 −10 0 10 20 30 40 Traiettoria metri metri
Figura 4.11: Traiettoria ottima in un tornante di raggio 40 metri
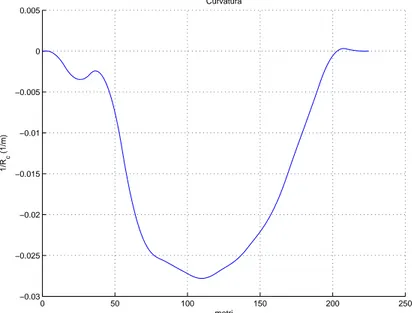
0 50 100 150 200 250 −0.03 −0.025 −0.02 −0.015 −0.01 −0.005 0 0.005 Curvatura metri 1/R c (1/m)
4.3 Tornante −150 −100 −50 0 50 100 150 200 250 15 20 25 30 35 40 45 50 55 60 Velocità di percorrenza metri velocità (m/s)
Figura 4.13: Velocità del veicolo nella percorrenza della traiettoria ottima
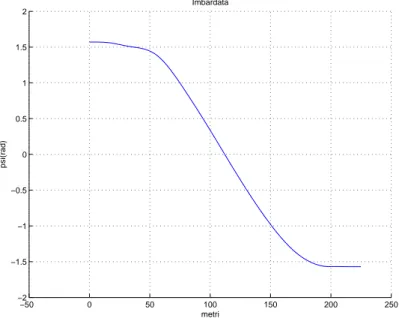
−50 0 50 100 150 200 250 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 Imbardata metri psi(rad)
Figura 4.14: Andamento dell’angolo d’imbardata nella percorrenza della traiettoria ottima
4.4 Curva con raggio crescente
4.4
Curva con raggio crescente
4.4.1
Modellazione del problema
La curva curva si compone di un primo tratto con raggio di curvatura di 40 metri, con uno sviluppo di 45 gradi, al quale seguono altri due tratti, sempre con uno sviluppo angolare di 45 gradi, di 60 ed 80 metri di raggio rispettivamente. La corsia è ampia 3 metri ed i punti di rappresentazione della traiettoria sono
• 4 punti sul rettilineo d’ingresso.
• 7 punti lungo lo sviluppo della curva (uno ogni 22.5 gradi). • 4 punti sul rettilineo d’uscita.
Come nelle curva precedenti, la spline risultante dall’interpolazione di questi 15 punti, è composta da 11 tratti.
La curvatura massima (localizzata nel primo tratto di curva) è pari a 0.025
m−1, a cui corrisponde un passo d’integrazione, ricavabile dalla figura 1.4, di
0.25 m. Come nel caso precedente il tempo di calcolo per ogni traiettoria è circa 5 minuti.
4.4.2
Ottimizzazione
Anche per questo tipo di curva si è operato come nei casi precedentemente esposti, attraverso un doppio processo di ottimizzazione delle 9 variabili che rappresentano una generica traiettoria. La seconda ottimizzazione è stata effettuata su una popolazione di 15 individui attraverso 15 generazioni, ed ha richiesto un tempo di calcolo pari a 12h 50min. Il tempo impiegato ad effettuare la traiettoria ottima è 11.60 secondi a cui corrisponde una velocità media di 31.4 m/s.
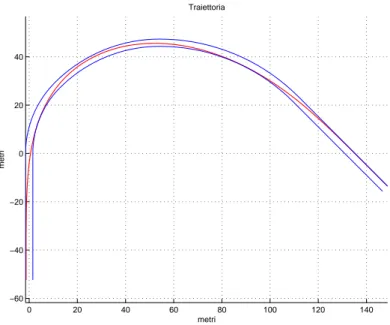
4.4 Curva con raggio crescente 0 20 40 60 80 100 120 140 −60 −40 −20 0 20 40 Traiettoria metri metri
Figura 4.15: Traiettoria ottima in una curva con raggio crescente da 40 ad 80 metri 0 50 100 150 200 250 −0.025 −0.02 −0.015 −0.01 −0.005 0 0.005 Curvatura metri 1/R c (1/m)
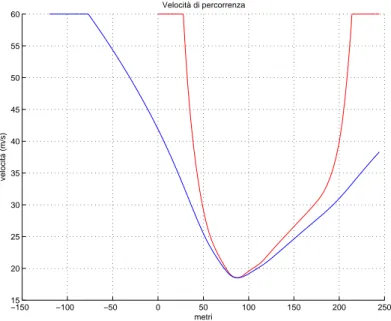
4.4 Curva con raggio crescente −150 −100 −50 0 50 100 150 200 250 15 20 25 30 35 40 45 50 55 60 Velocità di percorrenza metri velocità (m/s)
Figura 4.17: Velocità del veicolo nella percorrenza della traiettoria ottima
−50 0 50 100 150 200 250 −1 −0.5 0 0.5 1 1.5 2 Imbardata metri psi(rad)
Figura 4.18: Andamento dell’angolo d’imbardata nella percorrenza della traiettoria ottima
4.5 Curva con raggio decrescente
4.5
Curva con raggio decrescente
4.5.1
Modellazione del problema
Infine questa ultima tipologia di curva si compone di tre settori angolari come la curva precedente, ma con raggi 60, 40 e 20 metri rispettivamente. I punti per il tracciamento di un percorso sono imposti in modo analogo alla curva precedente, ovvero
• 4 punti sul rettilineo d’ingresso.
• 7 punti nello sviluppo della curva (uno ogni 22.5 gradi). • 4 punti sul rettilineo d’uscita.
La spline risultante è composta da 11 tratti, la corsia stradale è posta pari, come nei casi precedenti, a 3 metri.
La curvatura massima si realizza nel tratto finale della curva ed è pari a 0.05
m−1, a cui corrisponde un passo d’integrazione di 0.21 m. Con tale passo
d’integrazione il tempo di calcolo sale fino a 8min 30sec circa.
4.5.2
Ottimizzazione
Come nelle curva precedenti si è operato un processo d’integrazione a cascata, con una prima ottimizzazione con passo ∆s di circa 2 metri ed analizzando una popolazione di 100 individui per 50 generazioni; mentre la seconda ot-timizzazione, con il passo d’integrazione sopra indicato, ha riguardato una popolazione di soli 10 individui per 10 generazioni. Tale seconda ottimiz-zazione, nonostante sia stata effettuata su soli 100 individui ha richiesto un tempo di calcolo di 10h. Nelle figure successive sono mostrati i risultati ot-tenuti al termine di questa seconda ottimizzazione. Il tempo di percorrenza ottimo è risultato pari a 9.35 secondi, a cui corrisponde una velocità media di 28.37 m/s.
4.5 Curva con raggio decrescente −10 0 10 20 30 40 50 60 70 80 90 −20 −10 0 10 20 30 40 50 Traiettoria metri metri
Figura 4.19: Traiettoria ottima in una curva con raggio decrescente da 60 a 20 metri 0 50 100 150 −0.035 −0.03 −0.025 −0.02 −0.015 −0.01 −0.005 0 0.005 Curvatura metri 1/R c (1/m)
4.5 Curva con raggio decrescente −150 −100 −50 0 50 100 150 15 20 25 30 35 40 45 50 55 60 Velocità di percorrenza metri velocità (m/s)
Figura 4.21: Velocità del veicolo nella percorrenza della traiettoria ottima
−20 0 20 40 60 80 100 120 140 160 −1 −0.5 0 0.5 1 1.5 2 Imbardata metri psi(rad)
Figura 4.22: Andamento dell’angolo d’imbardata nella percorrenza della traiettoria ottima