CAPITOLO TRE:
SVILUPPO E REALIZZAZIONE DI UN
SISTEMA A BASSO COSTO PER SPETTROSCOPIA NEL VICINO
INFRAROSSO
3.1:
STRUMENTI COMMERCIALI PER LA SPETTROSCOPIA NEL VICINO
INFRAROSSO
3.1.1:
INTRODUZIONE
In questo paragrafo presenteremo alcuni strumenti commerciali che vengono utilizzati per analisi di spettroscopia nel vicino infrarosso
Fin dall’inizio del ventesimo secolo si è cercato di realizzare un dispositivo che potesse monitorare l’ossigenazione di un campione di tessuto di interesse.
Il più importante di questi dispositivi, da un punto di vista clinico, è stato descritto per la prima volta nel 1977 da F.F Jöbsis negli Stati Uniti.
Anche se i principi impiegati nel monitoraggio dell’ossigenazione cerebrale sono all’incirca gli stessi utilizzati per le altre parti del corpo, l’ossigenazione cerebrale non fu presa in considerazione per molti decenni in quanto, non si disponeva di una tecnologia abbastanza sensibile per lo studio di tessuti profondi, come appunto il cervello.
3.1.2:
NIRO MONITOR 300 HAMAMATSU
Questo strumento è stato introdotto nel 1998, ed è mostrato nella figura 3.1; la particolarità che lo contraddistingue rispetto ad altri precedenti, come il NIRO-1000 e il NIRO-500 che utilizzavano componenti di uso comune, è quella di utilizzare sorgenti e rivelatori della luce infrarossa sviluppati appositamente per l’applicazione, come ad esempio semiconduttori realizzati con materiale per applicazioni laser.
Oggi il NIRO 300 è utilizzato in molti campi tra i più importanti ricordiamo la chirurgia, anestesiologia e rianimazione e la pediatria.
Fig. 3.1-Strumento per la spettroscopia nel vicino infrarosso NIRO 300
Di seguito descriveremo brevemente la caratteristiche principali di questo dispositivo.
3.1.3:
GRANDEZZE MISURABILI CON IL NIRO 300
Il NIRO-300 può misurare le variazioni di concentrazione seguenti:• Variazioni di concentrazione dell’emoglobina ossigenata ∆O2Hb
• Variazioni di concentrazione dell’emoglobina non ossigenata ∆Hb • Variazioni di concentrazione dell’emoglobina totale ∆cHb
• Variazioni in termini di differenza tra il citocromo ossidato e ridotto ∆CtOx
Inoltre può misurare il coefficiente di ossigenazione del tessuto che è definito come il rapporto tra le concentrazioni dell’emoglobina ossigenata e dell’emoglobina totale:
TOI = HbO2 / cHb
Per la misura di questo coefficiente si sono utilizzate una sonda in emissione che raccoglie il fascio di luce laser della sorgente, che è costituita da diodi laser a quattro lunghezze d’onda, e una sonda in ricezione che, piazzata ad alcuni centimetri dalla prima, raccoglie la luce che ha attraversato il tessuto.
Nella figura seguente sono mostrati sia la struttura della sonda che il principio di misura che abbiamo descritto sopra:
Fig 3.2-Principio di misura e struttura della sonda del NIRO 300
Come mostrato nella figura 3.2 la sonda ricevente è dotata di un fotorivelatore che in questo caso è costituito da tre piccoli sensori.
3.1.4:
PRINCIPI DI PROGETTO
Il primo principio che dobbiamo tenere in considerazione è quello che il tessuto cerebrale è racchiuso dalla scatola cranica e dal cuoio capelluto; quindi per effettuare delle misure attendibili sul cervello è importante che la distanza tra il punto di emissione e quello di ricezione sia la maggiore possibile.
Il NIRO 300 è realizzato con sensori ad elevata sensibilità che permettono di effettuare misure con una distanza sorgente emettitore di 5 centimetri.
Un’ altra caratteristica importante del NIRO 300 è quella di essere realizzato in modo tale da possedere una intensità di irradiazione ridotta; le sorgenti rientrano nella classe uno dello standard internazionale per il laser IEC-825.
Le variabili principali che sono prese in considerazione per mantenere un livello di emissione di sicurezza per il corpo umano sono:
• Irradiazione accidentale negli occhi
• Utilizzo dell’apparecchiatura su bambini e neonati
• Misure che richiedono un tempo di esposizione prolungato
seguente derivata ∂A/∂ρ, dove A rappresenta l’attenuazione della radiazione luminosa emessa dalla sorgente e ρ è la distanza tra gli emettitori e il blocco di ricezione.
Da quanto abbiamo detto per avere una misura attendibile del TOI è indispensabile poter determinare con precisione la pendenza della curva di attenuazione; per far questo dobbiamo, innanzitutto, minimizzare gli effetti negativi sulla misura dovuti al fatto che la superficie della testa non è uniforme: l’inconveniente è superato considerando un’area di ricezione di 8x8 millimetri abbastanza piccola se confrontata con la distanza dalla zona di emissione che abbiamo visto essere dell’ordine dei 40-50 millimetri.
La ∂A/∂ρ può essere valutata utilizzando due soli dei sensori in ricezione, il NIRO 300 è realizzato con tre sensori per poter individuare la zona lineare, infatti una pendenza lineare è una condizione indispensabile per poter effettuare una misura il più possibile attendibile; se la linearità scende sotto un determinato livello viene visualizzato un messaggio sul monitor dello strumento.
Per non distorcere il fascio di luce proveniente dalla pelle e diretto verso il blocco di ricezione, ed ottenere una misura più accurata della ∂A/∂ρ viene posizionata una fibra ottica a piastre come mostrato nella figura 3.2.
3.1.5:
IL SISTEMA INVOS DELLA SOMANETICS
Descriviamo brevemente un altro strumento utilizzato per indagini cliniche tramite l’utilizzo della tecnica NIRS.
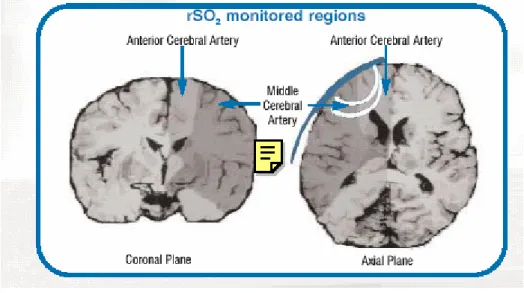
Questo strumento compatto e portatile visualizza, in maniera continua e ovviamente non invasiva, le variazioni nei livelli di saturazione dell’ossigeno nella regione posta sotto una fascia chiamata SomaSensor che è collegata al monitor sul quale è visualizzato l’andamento della grandezza misurata, che è appunto il livello di ossigenazione del sangue, che è indicata come rSO2.
Il principio della misura è del tutto analogo a quello che utilizza il NIRO 300: in questo caso la misura è eseguita facendo passare un fascio di luce infrarossa attraverso la fronte del paziente per arrivare al cervello, senza alcun rischio per il paziente e per il medico trattandosi di radiazioni non ionizzanti.
La profondità che può essere raggiunta dal fascio luminoso infrarosso dipende, come di consuetudine in indagini con la tecnica NIRS, dalla distanza a cui sono posti la sorgente, questa volta costituita da LED che emettono luce nel vicino infrarosso, e i fotoricevitori.
Poiché nella regione del cervello sotto indagine, mostrata in figura 3.3, si ha una maggioranza di sangue venoso, i cambiamenti nel valore dell’ rSO2, che possono essere visti sul monitor del
sistema INVOS, sono strettamente correlati all’equilibrio che deve esistere tra l’ossigeno arterioso liberato e il consumo cerebrale; variazioni nel valore di rSO2 indicano uno squilibrio.
Fig 3.3-Regioni del cervello su cui si opera con l’invos della somanetics
Il sistema INVOS compie la misura campionando ad una frequenza di 50Hz e aggiornando il valore visualizzato sul monitor ogni quattro secondi.
La coppia di ricevitori fornisce la risoluzione spaziale necessaria ad abbattere gli artefatti, causati dall’effetto che potrebbero avere altri tessuti, oltre a quello cerebrale, sulla misura.
Il fatto di avere a disposizione un segnale non influenzato, grazie agli accorgimenti sulla coppia di ricevitori, da pressione sanguigna, temperatura e battito cardiaco, i quali, nel caso di indagini con tecnica NIRS, possono portare anche grossi disturbi nella visualizzazione del segnale utile, è sicuramente un punto a favore del sistema INVOS.
Bisogna sottolineare che, storicamente, le disfunzioni neurologiche, così come la maggiore incidenza delle complicazioni di carattere neurologico, hanno provocato un incremento nei costi delle cure ospedaliere; studi clinici hanno dimostrato che variazioni del parametro rSO2, superiori al
20% rispetto ad un valore di riferimento ma che mantengono il valore assoluto della grandezza misurata al di sotto di 50, sono associate alle cause più diverse come ad esempio: l’abbassarsi delle capacità cognitive con il tempo, un prolungato periodo di degenza in ospedale, un danno al lobo frontale; si può comprendere come il dover indagare su una gamma di fenomeni così ampia implichi un aumento nei costi delle cure per le strutture ospedaliere. Con l’avvento della tecnica NIRS, e il relativo sviluppo di sistemi come INVOS, si può fornire un primo segnale di allarme che
Si può quindi capire che sistemi come quelli descritti siano molto importanti da un punto di vista diagnostico.
3.1.6:
IL SISTEMA OXIPLEX TS DELLA ISS
Questo strumento utilizza luce infrarossa per la misura, ovviamente in maniera non invasiva, in tempo reale della saturazione dell’ossigeno nel sangue e della concentrazione di emoglobina all’interno del tessuto sotto indagine.
L’OIPLEX TS per la sua capacità di determinare sia il livello assoluto di ossigeno nel tessuto, sia le variazione relative del livello di ossigenazione, è un sistema del tutto innovativo.
Come abbiamo già messo in evidenza nel primo capitolo la spettroscopia nel vicino infrarosso offre le caratteristiche ideali per la verifica e il monitoraggio dell’ossigenazione dei tessuti, dei muscoli e del cervello.
L’OIPLEX TS utilizza due diverse lunghezze d’onda, precisamente 690 e 830nm, scelte appositamente per massimizzare il contributo all’assorbimento della radiazione infrarossa dell’emoglobina nelle sue due forme ridotta e ossigenata; allo stesso tempo operando secondo queste specifiche si minimizza il contributo degli altri cromofori.
La radiazione luminosa è modulata in ampiezza ed è trasportata dalla sorgente al ricevitore tramite fibre ottiche, una fibra di raccolta riporta poi indietro allo strumento la radiazione luminosa che ha attraversato il tessuto sotto esame.
Le fibre utilizzate per trasportare la radiazione luminosa sul tessuto sono posizionate a distanze diverse, in generale multiple, dalla fibra di raccolta; tipicamente vengono utilizzate, per la sorgente, otto fibre, quattro per ciascuna lunghezza d’onda.
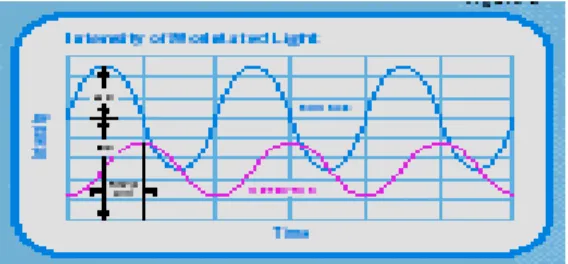
Fig 3.4-Parametri del fascio di luce modulato misurati dall’Oxiplex TS
Lo strumento rende disponibili anche i parametri del fascio laser modulato della sorgente; come mostrato in figura 3.4 viene fornita sia l’ampiezza della modulazione, indicata con AC, sia il valore
medio del segnale e anche mostrato lo sfasamento tra il segnale che entra nel tessuto e quello che lo ha attraversato.
Attraverso questi parametri, applicando la teoria della migrazione dei fotoni, lo strumento è in grado di determinare il valore assoluto, e non solo le variazioni, sia del coefficiente di scattering che di quello di assorbimento come mostrato in figura 3.5.
Fig 3.5-Coefficienti di scattering e assorbimento misurati con l’Oxiplex TS
Questa caratteristica rende L’OXIPLEX TS, tra gli strumenti che utilizzano la tecnica NIRS, uno dei più efficaci.
Come risultato infatti il sistema è in grado di fornire i valori assoluti, sia della concentrazione totale di emoglobina, presente nel tessuto sotto indagine, sia le singole concentrazioni dell’emoglobina ossigenata e di quella ridotta; inoltre è fornito il livello di saturazione dell’ossigeno nel tessuto indicato con sO2.
Dopo aver descritto il principio su cui si basa il sistema e aver indicato quali sono le grandezze che tramite esso possono essere misurate in figura 3.6 descriviamo brevemente il dispositivo; osservando l’interfaccia si può notare la presenza di due canali, che possono essere utilizzati nel caso sia necessario operare simultaneamente in due diverse aree di misura, ogni canale di trasmissione del segnale è equipaggiato con otto sorgenti di luce infrarossa quattro per ogni lunghezza d’onda impiegata, mentre il canale ricevente è provvisto di un tubo fotomoltiplicatore.
L’OXIPLEX TS può anche visualizzare, mediante un modulo che si interfaccia con il sistema, durante la misura, fino a quattro segnali analogici generati da apparecchiature esterne come ad esempio la velocità di respirazione e pressione sanguigna; in questo modo si possono controllare durante la misura altri parametri che possono essere correlati ad essa.
Il sistema dispone anche di diversi tipi di sensori a seconda delle diverse applicazioni:
• Sensore standard rigido • Sensore flessibile • Mini sensore flessibile
Il primo è realizzato con materiale plastico leggero che garantisce una buona durata e una facile manutenzione; il sensore è equipaggiato con otto emettitori e un ricevitore per la raccolta dei dati. Utilizzando questa classe di sensori è anche possibile per l’utilizzatore impostare la distanza fra sorgente e ricevitore.
Il sensore è dotato anche di un accessorio che può essergli attaccato nel caso in cui debbano essere compiute delle misure con il paziente in movimento; questo tipo di sensori sono molto utilizzati in applicazioni riguardanti l’ossigenazione dei muscoli.
Il secondo sensore è fatto con una gomma flessibile e proprio per questa sua caratteristica è destinato a misure su superfici curve come ad esempio la testa.
Anche in questo caso il sensore è equipaggiato con otto emettitori disposti a coppie in quatto posizioni, l’intervallo di distanze emettitore-ricevitore che può essere coperto va da 1.5 a 5 centimetri.
Di questo tipo di sensore si trova anche la versione per mancini oltre a quelle per i pazienti che usano la mano destra, usandoli entrambi si può simultaneamente monitorare due posizioni vicine ad esempio sui due emisferi opposti del cervello.
Le applicazioni in cui si può utilizzare questa classe di sensori sono: l’analisi dell’ossigenazione cerebrale, dell’apnea durante il sonno e di ematomi a livello cerebrale.
La versione mini del sensore flessibile è del tutto analoga a quella appena descritta, fatta eccezione per le dimensioni che sono state ridotte e ottimizzate per studi su bambini e neonati.
SVILUPPO E REALIZZAZIONE DI UN
SISTEMA A BASSO COSTO PER SPETTROSCOPIA NEL VICINO
INFRAROSSO
3.2:
SCELTA DEGLI EMETTITORI
Nel capitolo precedente abbiamo descritto le principali tipologie di emettitori che possono essere utilizzate nella spettroscopia nel vicino infrarosso disponibili oggi sul mercato; considerando gli obiettivi fondamentali, soprattutto un buon rapporto fra prestazioni e prezzo, la nostra attenzione si è rivolta verso i diodi emettitori di luce.
Questi dispositivi infatti sono reperibili abbastanza semplicemente e ad un prezzo molto contenuto. Come abbiamo visto parlando delle caratteristiche principali dei LED oltre al basso costo abbiamo anche una buona affidabilità.
Per la nostra applicazione, seguendo anche le indicazioni riportate in letteratura, si è deciso di utilizzare due coppie di LED, infatti volendo monitorare le variazioni di concentrazione dell’emoglobina ossigenata e non ossigenata utilizzeremo una coppia di emettitori per le due lunghezze d’onda di interesse.
Nella figura 3.7 riportiamo lo spettro di assorbimento dell’emoglobina nelle sue due forme, che abbiamo già visto nel capitolo uno, per mettere in evidenza quali sono le lunghezze d’onda con le quali dovremo operare.
Come sappiamo i cromofori che assorbono la luce infrarossa all’interno dei tessuti sono i più svariati, ad esempio l’acqua presente in concentrazioni elevate oppure i lipidi; volendo massimizzare la risposta del nostro sistema rispetto a quelle che sono, appunto, le variazioni di concentrazione delle due forme di emoglobina si andranno a considerare le due lunghezze d’onda alle quali i due spettri di assorbimento presentano il picco di assorbimento.
Da quanto detto si ricava quindi la prima specifica che i nostri LED dovranno soddisfare, cioè quella di emettere luce infrarossa alle lunghezza d’onda seguenti:
• λ1 = 780nm picco di assorbimento dell’emoglobina non ossigenata
• λ2 = 880nm picco di assorbimento dell’emoglobina ossigenata
avendo scelto le lunghezze d’onda di emissione delle nostre sorgenti, si sono analizzati alcuni degli svariati dispositivi emettitori che sono presenti nella letteratura, alla fine la scelta, per quanto riguarda la lunghezza d’onda λ2, è caduta sull’ SFH485 P, un LED realizzato con Arseniuro di
Gallio e Alluminio dalla Siemens, che riportiamo nella figura sottostante:
Fig 3.8 - Emettitore SFH 485 P
Questo dispositivo presenta il picco di emissione, λpicco, a 880nm come richiesto dalla nostra
applicazione, le dimensioni del chip sono 0.4 x 0.4 millimetri, l’area attiva del chip è pari a 0.16mm2, mentre la distanza tra il chip e la superficie dell’involucro che lo contiene, il case, va da 0.5 a 1 millimetro.
Altro parametro importante è l’angolo al di fuori del quale la potenza della radiazione emessa si dimezza del 50%, Half Angle; infatti considerando che per questo lavoro di tesi si è rinunciato all’accoppiamento della radiazione infrarossa in fibra ottica, che avrebbe garantito una dispersione minore nel trasporto della radiazione sul tessuto sotto esame, bisogna cercare un dispositivo che
presenti un Half Angle il più stretto possibile in modo da ridurre quanto più possibile la dispersione dovuta al fatto che la luce infrarossa emessa è trasportata in aria e non in fibra ottica.
L’ SFH 485 P presenta un angolo del fascio di ± 40° che permette di avere un buon compromesso tra la dispersione della radiazione emessa e una discreta direzionalità del fascio.
Naturalmente visto che la radiazione infrarossa viene inviata ad un tessuto bisogna anche considerare l’intensità radiante che non deve essere troppo elevata per non causare danni di tipo termico, come abbiamo descritto nel primo capitolo, visto che la radiazione infrarossa è non ionizzante, come abbiamo già più volte sottolineato; per quanto riguarda questa caratteristica non ci sono particolari restrizioni, il nostro dispositivo presenta un flusso radiante totale Φe di 25mW, in
letteratura, mentre si analizzavano i diversi LED utilizzabili per il nostro dispositivo, se ne sono trovati anche con Φe minore rispetto all’ SFH 485 P, ma un flusso radiante troppo basso avrebbe
creato problemi nella ricezione del segnale utile; si è quindi anche in questo caso scelta una soluzione di compromesso che soddisfi entrambi gli aspetti: sia quello della sicurezza per il tessuto, dal punto di vista termico, che quello della ricezione del segnale utile.
L’ SFH 485 P è un dispositivo a struttura superficiale, emette quindi la radiazione infrarossa utilizzando la superficie di base, come mostrato in figura 3.9:
Fig 3.9- Emissione della radiazione per un LED a struttura superficiale
Sono disponibili anche LED che utilizzano per l’emissione la superficie laterale come mostrato di seguito:
Fig 3.10-Dispositivo ad emissione laterale
Questi dispositivi ad emissione laterale sono abbastanza complessi e costosi ma offrono ottime prestazioni sia per quanto riguarda la potenza del fascio disponibile in uscita dal LED, che risulta elevata, che la velocità; inoltre lo spot in emissione e abbastanza piccolo, tipicamente dai 30 ai 50µm, questo favorisce l’eventuale accoppiamento in fibra ottica.
Si e scelto un dispositivo ad emissione superficiale in quanto anche se non presenta le stesse performance dal punto di vista della potenza in uscita e della velocità ha comunque prestazioni che, per quanto riguarda il nostro tipo di applicazione, sono più che accettabili; infatti nel nostro caso non è necessaria una sorgente ad elevata potenza ed anche il fenomeno che andremo ad analizzare, essenzialmente la variazione di concentrazione dell’emoglobina in seguito ad uno stimolo motorio, presenta una durata tale da non rappresentare una specifica stringente; inoltre i dispositivi ad emissione superficiale presentano una complessità e un costo decisamente inferiore. Per quanto riguarda invece i due LED che devono emettere a 780nm si è trovata qualche difficoltà in più, questa lunghezza d’onda non è infatti tra quelle commerciali, quindi non è stato possibile disporre di una serie di dispositivi su cui effettuare confronti; si è trovato un solo dispositivo che emette a 780nm facilmente reperibile, l’ OD-780W, prodotto dalla OPTO DIODE; come per l’ SFH 485 P ne illustriamo le caratteristiche principali.
Il flusso radiante per l’ OD-780W è circa 15mW, inferiore rispetto a quello dell’ SFH 485 P ma ancora accettabile per il nostro scopo; presenta un angolo di dimezzamento della potenza della radiazione emessa pari a ±40° come il dispositivo emettitore a 880nm.
Anche l’OD-780W è un dispositivo ad emissione superficiale, presenta tuttavia uno spettro di emissione piuttosto stretto il che naturalmente non può che essere una caratteristica positiva; inoltre presenta dimensioni ridotte, altra caratteristica importante per il nostro sistema.
3.2.1:
CIRCUITI DI PILOTAGGIO PER LE SORGENTI
L’intensità della radiazione emessa da un LED è approssimativamente proporzionale alla corrente di pilotaggio; altri fattori, come ad esempio la temperatura, possono influire sulla radiazione infrarossa.
I circuiti di pilotaggio per le sorgenti possono essere sia analogici che digitali: per la nostra applicazione abbiamo optato per una soluzione analogica più semplice ed economica.
Di seguito descriveremo alcune possibili soluzioni per il pilotaggio delle sorgenti del nostro sistema indicando naturalmente quella che si è scelto di adottare.
•
DRIVER ANALOGICI
Le configurazioni per il pilotaggio che prendiamo in considerazione sono mostrate nella figura 3.11:
FIg 3.11- Possibili circuiti di pilotaggio per la sorgente
Il circuito indicato in figura con la lettera a) è il più semplice: utilizza un transistor Q1 ed una coppia
di resistenze per convertire un tensione analogica in ingresso in una corrente proporzionale che scorre nel LED D1 che rappresenta la nostra sorgente.
Questa configurazione va anche sotto il nome di amplificatore transconduttivo e converte appunto una tensione di ingresso in una corrente.
Come abbiamo già sottolineato in precedenza l’intensità della radiazione emessa da un LED è proporzionale alla corrente di pilotaggio e non alla tensione.
Per quanto riguarda le nostre sorgenti, sia l’SFH 485 P che L’OD-780W, presentano un picco per la corrente di pilotaggio di 100mA, mentre la tensione ai capi del dispositivo è di 1,5V.
Descriviamo ora come opera l’amplificatore transconduttivo: la resistenza R1 è la resistenza che
collega l’ingresso con la base del transistore Q1 il suo valore è di solito abbastanza piccolo in
quanto lo scopo di questa resistenza è prevenire eventuali oscillazioni che possono presentarsi sul transistor Q1.
Poiché si è scelto per R1 un valore basso il segnale di ingresso si presenta sulla base del transistor
Q1, se indichiamo con VR2 la tensione di emettitore del transistor, pari alla tensione di base meno la
caduta di tensione tra base ed emettitore pari a 0.6V, allora la corrente che scorre nella resistenza R2, che collega l’emettitore di Q1 a massa, è data da VR2 / R2.
A causa della natura del transistor sappiamo che la corrente di collettore e di emettitore sono approssimativamente uguali; per essere precisi la corrente di collettore è pari a β/(β+1) la corrente di emettitore, dove β è il guadagno in corrente del transistor e tipicamente compreso nell’intervallo tra 10 e 100; a questo punto possiamo scrivere la relazione tra il segnale di ingresso e la corrente di pilotaggio della sorgente:
(3.1)
Dalla 3.1 si ricava facilmente che variando R2 è possibile imporre una corrente sul LED, in
particolare per quanto riguarda il nostro lavoro di tesi il valore della corrente di pilotaggio da imporre è quello di picco, 100mA, al quale corrisponde la massima emissione di radiazione infrarossa da parte delle nostre sorgenti.
Questa configurazione per il pilotaggio ha come punti di forza la semplicità e il basso costo, requisiti importanti per la nostra applicazione, tuttavia il maggiore inconveniente è dovuto alle non linearità che l’amplificatore transconduttivo può presentare.
Per eliminare la maggior parte delle non linearità associate al transistor Q1 si può utilizzare una
configurazione come quella di figura 3.11 b) nel quale è presente un anello di reazione negativa. Proprio per la presenza della reazione eventuali variazioni del segnale, ad esempio sulla base di Q1,
che porterebbero ad una variazione della tensione di emettitore e quindi ad una variazione della corrente di pilotaggio, vengono riportate sull’ingresso invertente dell’amplificatore operazionale e quindi sottratte al segnale di ingresso; quindi il circuito sfruttando la reazione negativa cerca di opporsi agli effetti di eventuali non linearità che inducono variazioni nella corrente di pilotaggio, in questo modo si riesce a pilotare la sorgente con una corrente costante.
La relazione che lega il segnale di ingresso alla corrente di pilotaggio in questo caso è data da:
(3.2)
Il circuito appena descritto ha una limitazione dovuta al ritardo introdotto dall’anello di reazione, infatti il segnale, come abbiamo visto, deve essere riportato all’ingresso dell’amplificatore, tuttavia per la nostra applicazione questa non è una limitazione importante.
Considerando quindi che questa configurazione pur mantenendo un buon livello di semplicità ed economicità elimina molti degli inconvenienti della precedente, è senza dubbio da preferirsi.
L’ ultimo circuito di pilotaggio che prendiamo in considerazione è quello che ha le migliori performance ed è riportato in figura 3.11 c).
Come si può osservare viene utilizzato un amplificatore a radio frequenza, al posto dell’amplificatore operazionale utilizzato per il driver visto sopra, che permette non solo di amplificare anche segnali di ingresso piccoli ma soprattutto isola il LED dal circuito di ingresso permettendo un buon adattamento di impedenza che riduce i fenomeni di riflessione.
A questo proposito, l’impedenza di uscita dell’amplificatore a RF è compresa nell’intervallo tra 50 e 75Ω, mentre l’impedenza di ingresso dei LED e compresa tra i 5 e i 10Ω, quindi per realizzare l’adattamento di impedenza è necessario l’utilizzo di un adattatore di impedenza.
Il condensatore C1 in uscita alla rete adattatrice serve per bloccare qualsiasi componente continua
associata all’uscita dalla rete di adattamento.
In questa configurazione per il circuito di pilotaggio la corrente è fornita al LED dalla resistenza R1.
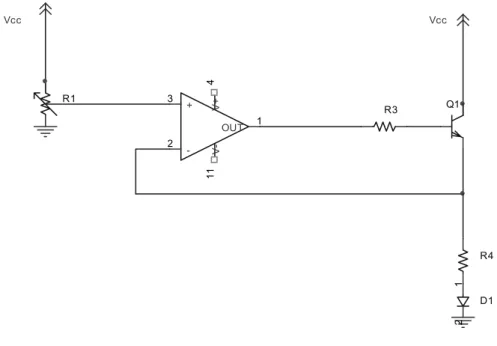
Questa configurazione è senza dubbio quella più complessa e costosa delle tre analizzate, inoltre per il nostro studio non è essenziale l’accoppiamento di impedenza, che il driver che abbiamo descritto permette di fare; per queste ragioni abbiamo scelto di adottare una soluzione come quella indicata in figura 3.11 b), il circuito di pilotaggio del nostro sistema è mostrato nella figura 3.12.
Come si può osservare il nostro circuito utilizza un potenziometro per poter variare il segnale in ingresso all’ amplificatore operazionale per il resto è del tutto simile a quello descritto sopra e riportato in figura 3.11 b), quindi, in definitiva, utilizzando un circuito semplice ed economico riusciamo ad ottenere un pilotaggio della nostra sorgente a corrente costante, che è appunto ciò che volevamo.
Vcc Vcc R1 3 2 4 11 1 + -V+ V-OUT R3 Q1 R4 D1 1 2
Fig 3.12- Circuito di pilotaggio a corrente costante per le sorgenti
3.2.2:
CIRCUITO TEMPORIZZATORE E LOGICA DI CONTROLLO PER LE
SORGENTI
• Timer per l’accensione dei LED
Poiché come abbiamo detto si hanno quattro emettitori, due per ogni lunghezza d’onda, dobbiamo poter avere la possibilità di accenderle in sequenza per un tempo determinato.
L’idea che vorremmo sfruttare per questo lavoro di tesi è quella di poter avere accese le sorgenti una alla volta per un tempo da noi fissato; il tempo di accensione sarà lo stesso per ogni sorgente, e naturalmente il tempo necessario ad accendere tutte le sorgenti deve essere inferiore alla durata del fenomeno che si deve osservare con il nostro sistema.
Da questo punto di vista non abbiamo vincoli molto stringenti, infatti il nostro sistema deve fornirci informazioni sulle variazioni di concentrazione dell’emoglobina sia ridotta che ossigenata nella corteccia cerebrale in seguito ad un task motorio;dalla letteratura abbiamo visto che il fenomeno in questione ha una durata di una decina di secondi, che come si può ben intuire non rappresenta una limitazione.
0 0 Vcc=5V U1A NE556 3 6 2 4 5 1 CON TRG THRES RST OUT DIS R3 500k R2 1200k R1 1k C2 120n C1 15n
Fig 3.13- Timer per l’accensione delle sorgenti
Montato in questa configurazione il timer, che è un NE 556 fornisce un’onda quadra con periodo dato dalla relazione seguente:
T = 0.693·[ R1+2(R2+R3) ]·C2 (3.3)
Se si sostituiscono i dati in figura si ottiene un periodo di accensione per ogni sorgente di 300ms circa, il che significa che per accendere in sequenza tutti e quattro i nostri LED è necessario un tempo pari a 1.2 secondi.
In questo modo è possibile poter effettuare più acquisizioni del segnale utile.
•
Logica connessa alle sorgenti
All’uscita del timer abbiamo posto un posto un contatore a 4 bit, quindi in grado di contare fino a 16, di cui però utilizzeremo soltanto due uscite.
La funzione di questo contatore è quella di contare da 0 a 3 in modo da indicarci quale delle sorgenti tra le quattro, in realtà quattro coppie, è in quel momento considerata; naturalmente si considereranno tutte le sorgenti a rotazione con la cadenza fornita dal timer.
Il contatore utilizzato è l’SN74LS93 della Texas Instruments che presenta la seguente tabella di verità:
Fig 3.13- Tabella di verità del contatore SN74LS93
Poiché dobbiamo soltanto contare come detto fino a quattro considereremo soltanto le uscite QA e
QB mentre l’uscita QC sarà utilizzata per resettare il contatore e farlo quindi ripartire da zero una
volta che si sia compiuto un ciclo completo di accensione dei LED.
Nella figura riportata nella pagina seguente è riportato il blocco comprendente il timer, che abbiamo già descritto sopra, il contatore e il successivo demultiplexer:
+Vcc NE556 3 6 2 4 5 1 CON TRG THRES RST OUT DIS SN74LS93 14 1 2 3 12 9 8 11 A B R0(1) R0(2) QA QB QC QD R10 1k R11 1200k R12 500K C12 120n C13 15n SN74LS138 1 2 3 6 4 5 15 14 13 12 11 10 9 7 A B C G1 G2A G2B Y0 Y1 Y2 Y3 Y4 Y5 Y6 Y7
•
Demultiplexer e Sistema di switch analogici
All’uscita del contatore abbiamo un demultiplexer che ha il compito di selezionare una delle quattro linee provenienti dalle sorgenti, infatti come vedremo solo quattro delle otto uscite del demultiplexer sono utilizzate.
Il demultiplexer utilizzato è l’SN74LS13, come riportato nella figura 3.14, del quale descriviamo brevemente le caratteristiche:
Questo demultiplexer presenta otto linee di uscita che sono attive basse, mentre in ingresso sono presenti tre ingressi di abilitazione e tre ingressi di selezione; lo schema logico del dispositivo e la relativa tabella di verità sono riportate nelle figure seguenti:
Fig 3.15- Simbolo logico del demultiplexer SN74LS13
Fig 3.17- Tabella di verità
Il sistema di switch successivo è stato realizzato per poter permettere la visualizzazione dei quattro segnali provenienti dalle sorgenti sui quattro canali forniti dal software, che analizzeremo in seguito.
Lo swicth che abbiamo adoperato è il MAX 391, che riportiamo nella figura 3.18, questo dispositivo comprende sull’integrato 4 switch normalmente chiusi; per poterne descrivere più chiaramente il funzionamento riportiamo anche l’equivalente elettrico e relative temporizzazioni:
Fig 3.19- Equivalente elettrico dello switch MAX391 e relative temporizzazioni
Come si può osservare in figura l’ingresso logico comanda l’apertura e la chiusura dello switch e quando lo switch è chiuso allora abbiamo in uscita, terminale NC, la tensione applicata sul terminale denominato “COM”.
Attraverso questo sistema di switch abbiamo la possibilità di visualizzare alternativamente su un canale di uscita uno dei segnali provenienti dalle nostre sorgenti, questo ci consente, in conseguenza ad esempio ad uno stimolo motorio, di individuare la zona in cui si è avuta l’attivazione con maggiore precisione; in ogni caso tramite questa soluzione circuitale possiamo avere un’informazione abbastanza dettagliata sull’effetto che ogni sorgente ha sul nostro ricevitore.
Naturalmente è anche possibile visualizzare tutti i canali in uscita contemporaneamente: ogni uscita è relativa a una delle 4 sorgenti, i canali vengono visualizzati con la temporizzazione imposta dall’elettronica di pre-elaborazione del segnale costituita in definitiva dal timer dal contatore e dal demultiplexer già analizzati sopra.
Di questo sistema di switch fa parte anche il gruppo di relè, comandati ognuno da un transistore bipolare: a seconda del canale selezionato il relè chiude l’interruttore e fa arrivare quindi il segnale della sorgente al ricevitore.
3.3:
SCELTA DEL RICEVITORE
3.3.1:
INTRODUZIONE
Come abbiamo visto nel secondo capitolo i possibili dispositivi che possono essere utilizzati come ricevitori in applicazioni di spettroscopia nel vicino infrarosso sono o tubi fotomoltiplicatori, che
senz’altro hanno le prestazioni migliori ma presentano un rapporto qualità prezzo non così competitivo, oppure più semplicemente fotodiodi.
Si è indirizzata fin da subito la nostra attenzione su questi ultimi in quanto sono facilmente reperibili a basso costo sul mercato.
Dopo alcune ricerche si è scelto di utilizzare un fotodiodo p-i-n al silicio della Siemens, l’SFH 203 P, che abbiamo riportato nella figura 3.20:
Fig 3.20- Il fotodiodo SFH 203 P
Di seguito descriveremo le caratteristiche principali del nostro sensore.
3.3.2:
CARATTERISTICHE PRINCIPALI DEL SENSORE SFH 203 P
• Risposta spettrale e Sensibilità
La prima grandezza sulla quale abbiamo concentrato la nostra attenzione è la cosiddetta risposta spettrale: un fotodiodo che viene raggiunto da una radiazione luminosa incidente con intensità data produce una fotocorrente e il valore di questa corrente varia con la lunghezza d’onda della luce incidente.
Questa relazione tra la lunghezza d’onda di funzionamento e la corrente in uscita dal rivelatore è appunto la risposta spettrale, la quale può essere espressa tramite l’efficienza quantica QE oppure tramite la sensibilità S.
La sensibilità che abbiamo scelto come parametro per caratterizzare la risposta del nostro sensore è data dal rapporto tra l’energia radiante che arriva al dispositivo espressa in Watts e la corrente in uscita dal dispositivo espressa in Ampere.
Ovviamente maggiore è il valore di S e maggiore sarà la foto-corrente in uscita dal dispositivo per un dato livello di radiazione incidente: è naturale quindi che maggiore sarà S migliore sarà la risposta del dispositivo.
L’ SFH 203 P presenta una sensibilità S il cui andamento è mostrato in figura 3.21, il valore di picco di S vale 0.62 A/W ad una lunghezza d’onda di 850nm che è un valore abbastanza buono, in figura si riporta la sensibilità espressa in percentuale rispetto al valore di picco.
Fig 3.21- Andamento della sensibilità S normalizzato rispetto al valore di picco dell’ SFH 203 P in funzione della lunghezza d’onda
Come si può osservare dalla figura la sensibilità S del nostro ricevitore alle lunghezze d’onda di interesse, che ricordiamo sono λ1= 780nm e λ2=880nm, è molto vicina al valore di picco,
discostandosi da esso per meno del 10%; il nostro fotorivelatore presenta quindi un ottima risposta spettrale alle lunghezze d’onda di interesse.
•
Efficienza quantica (QE)
Questo parametro ci indica appunto quanto è efficiente il nostro dispositivo, in un certo senso ne costituisce il rendimento, infatti l’efficienza quantica è data dal rapporto tra il numero di portatori,
elettroni o lacune, che possono essere rivelati come una foto-corrente e il numero dei fotoni incidenti.
In pratica quindi QE ci informa su quanti sono i fotoni che arrivati al dispositivo hanno contribuito alla generazione della foto-corrente ed è normalmente espressa in percentuale.
Tra efficienza quantica QE e sensibilità S esiste la seguente relazione naturalmente valida per una lunghezza d’onda fissata:
QE = S·1240·λ1/2·100 [%] (3.3)
nella 3.3 S è misurata, come sappiamo, ad una determinata lunghezza d’onda λ in A/W, mentre la lunghezza d’onda λ è espressa in nano metri.
Se proviamo ad applicare questa formula per λ=850nm ed S = 0.62 A/W si ricava una QE = 70.87%.
•
Potenza equivalente di Rumore (NEP)
Questo parametro ci informa su quale deve essere il livello di luce che deve arrivare al ricevitore per avere la possibilità di distinguere tra segnale utile e rumore del dispositivo, detto in altri termini il NEP rappresenta il livello di luce richiesto per ottenere un rapporto segnale rumore unitario. La potenza equivalente di rumore è data dal rapporto tra la corrente di rumore misurata in [A/Hz1/2], e la sensibilità S, di cui però si considera il valore di picco, misurata naturalmente in A/W; proprio a causa del fatto che il livello di rumore del dispositivo è proporzionale alla radice quadrata della larghezza di banda si è soliti misurare il NEP su una banda di 1Hz.
Per il nostro dispositivo la potenza equivalente di rumore è pari a:
NEP = 2.9·10-14 W/ Hz1/2
Nel nostro caso il NEP è un parametro molto importante, infatti, dovendo il sistema effettuare misure su un tessuto biologico, ci si dovrà aspettare di avere a che fare con un sistema già di per se intrinsecamente rumoroso ed è quindi abbastanza importante avere un ricevitore in grado di distinguere il segnale utile proveniente dal tessuto sotto esame anche se può essere piuttosto debole proprio a causa degli artefatti, introdotti dal sistema sotto indagine, che possono influenzarlo.
Per quanto detto minore è la potenza equivalente di rumore e migliori sono le prestazioni del ricevitore nel discriminare anche segnali deboli, visto che il suo livello di rumorosità interno è tanto più basso quanto minore è il NEP.
Per quanto detto si è cercato, tra i tanti, un dispositivo che presentasse anche buone caratteristiche sotto questo punto di vista; l’SFH 203 P con il suo basso valore del NEP ci fornisce ottime garanzie per quanto riguarda la sua rumorosità interna.
Generalmente con l’inverso del NEP si indica un altro parametro che è chiamato D ed indica la capacità di rivelazione.
•
Corrente di buio e Resistenza di Shunt
La corrente di buio è quella piccola corrente che fluisce quando al fotodiodo, mantenuto in stato di riposo e quindi al buio, è applicata una tensione inversa.
La corrente di buio rappresenta la principale sorgente di rumore in applicazioni in cui al fotodiodo è applicata una tensione inversa di polarizzazione.
Per il nostro dispositivo con una tensione inversa di polarizzazione VR pari a 20V si ha una
ID =1nA, valore molto basso.
Al contrario per applicazioni in cui non si applica una tensione inversa di polarizzazione, diventa predominante, come sorgente di rumore, la resistenza di shunt Rsh.
Questa resistenza è data dal rapporto tra tensione e corrente di buio nelle vicinanze dello zero:
Rsh = 10[mV]· ID1/2 [Ω]
Dove ID è la corrente di buio misurata naturalmente per una tensione inversa di polarizzazione pari
a 10mV.
3.3:
CIRCUITO DI RIVELAZIONE DEL SEGNALE
Dopo aver caratterizzato il nostro ricevitore avendone descritto le principali caratteristiche andiamo a descrivere e ad analizzare il circuito di rivelazione del segnale proveniente dal tessuto sotto indagine.
•
Blocco per la calibrazione del sistema
Come prima cosa descriviamo il blocco di calibrazione utilizzato nel nostro sistema, quest’ultimo è riportato in figura 3.22 +Vcc -Vcc +Vcc -Vcc +Vcc + -TL084 3 2 1 4 11 R1 120K + -TL084 3 2 1 4 11 C1 1n R2 10K R3 1k
Fig 3.22- Blocco per la calibrazione del sistema
Il blocco di calibrazione è stato inserito a valle di quello di amplificazione e di filtraggio, che descriveremo in seguito; vediamo come opera.
Tramite R2, si preleva una porzione della tensione di alimentazione che viene riportata tramite il
buffer al terminale invertente dell’amplificatore che riceve il segnale; si deve osservare che poiché R2 è un potenziometro multigiro è possibile selezionare in maniera fine il livello di tensione che si
intende sottrarre al segnale utile proveniente dalla catena di amplificazione.
In questo modo si elimina un offset continuo al segnale utile evitando quindi di poter avere problemi di saturazione del segnale e quindi di perdita di informazione.
Inoltre la differenza tra il segnale utile e il livello continuo da noi selezionato viene ulteriormente amplificata di un fattore 120.
Il condensatore C1 è stato inserito per evitare fenomeni di instabilità quando si preleva l’offset da
•
Blocco di amplificazione del segnale
Il blocco amplificatore è mostrato in figura 3.23
-12V +Vcc -Vcc + -U3 OPA111/TO 3 2 6 7 5 4 8 1 R4 R5 10M C3 22pF
Fig 3.23 Blocco di amplificazione del segnale
L’amplificatore utilizzato è l’OPA111AM della Burr-Brown che presenta ottime caratteristiche per quanto riguarda il rumore del dispositivo, il guadagno ad anello aperto, la tensione di offset, la deriva con la temperatura, la corrente di bias e la reiezione del segnale a modo comune.
Le caratteristiche principali del nostro amplificatore sono riportate in tabella 3.1:
CORRENTE DI BIAS MASSIMA 1pA
TENSIONE DI OFFSET MASSIMA 250µV
DERIVA CON LA TEMPERATURA MASSIMA 1µV/°C
GUADAGNO AD ANELLO APERTO MINIMO 120dB
REIEZIONE DEL SENALE A MODO COMUNE MINIMA 100 dB
TENSIONE DI RUMORE MASSIMA 8nV/√Hz
Tab 3.1- Caratteristiche principali dell’OPA111AM
Fig 3.24- L’amplificatore OPA111AM
Questo amplificatore presenta una configurazione cascode, che garantisce come abbiamo visto un basso rumore; questa è forse la caratteristica più importante, infatti come sappiamo il primo amplificatore della catena è anche quello che determina essenzialmente il rumore totale del sistema. La caratteristica di basso rumore è importante per la nostra applicazione in quanto il segnale proveniente dal ricevitore, come abbiamo già avuto modo di sottolineare, può presentare artefatti ed è quindi di fondamentale importanza per la sua ricezione e soprattutto per quella che è l’interpretazione dei risultati ottenuti.
Per ottenere una buona regolazione della tensione di offset si utilizza il potenziometro inserito tra i due terminali 1 e 5 come mostrato nella figura seguente:
L’OPA111AM presenta anche una elevata impedenza di ingresso, compresa nell’intervallo tra 1013 e 1014 Ω caratteristica senza dubbio positiva in quanto si minimizza l’effetto caricante sulla sorgente, che in questo caso è rappresentata dal nostro ricevitore.
L’OPA111AM inoltre ha la possibilità di utilizzare il piedino 8 per la realizzazione di un elettrodo di guardia che avrà la funzione di minimizzare le correnti di perdita e allo stesso tempo il rumore. Il case dell’amplificatore verrà connesso tramite il pin 8 allo schermo sull’ingresso, questo assicura che l’OPA111AM sarà completamente circondato dal potenziale di guardia; questa precauzione adottata nel nostro sistema permette di minimizzare le perdite come mostrato in figura:
Fig 3.26- Possibili connessioni dell’elettrodo di guardia
Questo accorgimento risulta molto importante in quanto avendo rinunciato all’accoppiamento in fibra ottica per il segnale, esso ha già subito inevitabili dispersioni prima di arrivare alla catena di amplificazione.
Inoltre il fatto che si utilizzi una elevatissima resistenza di reazione, se da un lato ci assicura una grande amplificazione del nostro segnale, dall’altro ci costringerebbe a inserire nel nostro sistema un circuito di protezione esterno, per evitare appunto fenomeni di caricamento della sorgente, cosa che possiamo evitare grazie alla possibilità offerta dall’anello di guardia.
•
Blocco di Filtraggio del segnale
Dopo essere passato attraverso il blocco di amplificazione il segnale incontra il blocco di filtraggio che è costituito da un filtro di Butterworth mostrato nella figura 3.22:
-Vcc +Vcc +Vcc -Vcc +Vcc -Vcc +Vcc -Vcc R1 1k C1 1n R2 100k R3 1k C3 150n + - TL084 3 2 1 4 11 C4 150n R4 100K R5 100K + -TL084 3 2 1 4 11 C5 150n + -TL084 3 2 1 4 11 C6 68n C8 150n R6 100K R7 100K + -TL084 3 2 1 4 11 R8 100K R9 100K C9 150n C10 47n C11 47n
Fig 3.22- Blocco di filtraggio con filtro di Butterworth a 9 poli
Per il filtraggio del segnale si è utilizzato un filtro a nove poli di Butterworth, il numero cosi elevato dei poli si spiega considerando che il nostro segnale utile è un segnale continuo, quindi più il filtro presenterà una risposta in frequenza con frequenza di taglio vicina alla continua e meno disturbi avremo sul nostro segnale.
Nella figura seguente è riportata la risposta in frequenza di un filtro di Butterworth fino al quarto ordine ed è confrontata con la risposta di un filtro passa basso ideale:
Fig 3.23- Risposta in frequenza in per filtri di Butterworth fino al quarto ordine
Naturalmente avendo considerato un numero di poli maggiore di quattro il nostro filtro avrà un andamento della risposta in frequenza ancora più ripido di quelle in figura; in particolare con i valori indicati in figura 3.21 il filtro presenta una frequenza di taglio di 30Hz.
Questa frequenza di taglio è stata scelta appositamente in quanto il sistema è connesso, naturalmente, all’alimentazione, che ha frequenza di 50 Hz, quindi una frequenza di taglio inferiore consente di evitare tutti i disturbi connessi all’alimentazione e quindi di poter visualizzare meglio il segnale.
Inoltre naturalmente avendo a che fare con un segnale continuo, minore sarà la frequenza di taglio del filtro e maggiore risulterà la reiezione dei disturbi in alta frequenza e di altri artefatti che possono essere associati al segnale utile.
3.3:
Visione del sistema nel suo insieme
Dopo aver descritto il nostro dispositivo a blocchi nella figura 3.24 si dà una visione di insieme del sistema che abbiamo realizzato.
Nella figura manca, per motivi di spazio sul foglio elettronico, il timer che abbiamo descritto che si trova a valle del contatore al quale deve fornire praticamente il clock.