Sommario
Questa tesi si inquadra nell’ambito delle attività, in corso presso il Dipartimento di Ingegneria Aerospaziale (DIA) dell’Università degli Studi di Pisa, per lo studio di sistemi di controllo Fly-By-Wire (FBW) dei comandi primari di volo con attuazione idraulica. Gli obiettivi del presente lavoro comprendono la caratterizzazione sperimentale della risposta in rigidezza di un attuatore servoidraulico e la verifica della corrispondenza delle stesse mediante un modello di simulazione sviluppato in attività di ricerca parallele.
A tal fine è stata realizzata un’apposita campagna di prove sperimentali presso i laboratori del DIA.
In una prima fase del lavoro è stata caratterizzata la risposta in posizione dell’attuatore e della relativa servovalvola DDV per definirne le prestazioni in ambiente isolato senza disturbi esterni e in diverse condizioni operative; successivamente sono stati eseguiti test di impedenza sul banco.
I risultati ottenuti sono stati poi confrontati con quelli rilevati presso altri laboratori per poter valutare l’attendibilità dei risultati ottenuti.
I test di rigidezza sono stati effettuati sia in presenza di carichi statici che in presenza di carichi dinamici in corrispondenza di diverse condizioni operative (avarie elettriche ed idrauliche) .
Infine sono state effettuate prove di simulazione con un modello Simulink di attuatore fornito dai tecnici di Alenia SIA e convalidato sulla base di test hardware di risposta in posizione il cui confronto con i test sperimentali è servito per verificare o meno la validità del modello.
INDICE
INTRODUZIONE………...………....……4
1 BANCO PROVA PER LA CARATTERIZZAZIONE DI RIGIDEZZA………....…5
1.1 Generalità………...…………...……5
1.2 Banco prova e unità di controllo………...….………7
1.3.1 Attuatore velivolo………...…………...…….……10
1.3.2 Montaggio dell’attuatore sul banco………..………15
1.3.3 Strumenti per il rilevamento degli spostamenti dell’attuatore………..………17
1.4 Centrali di potenza idraulica…………..………...………..19
1.5 Descrizione della postazione prova ………...…………...20
2 TEST PRELIMINARI DI CARATTERIZZAZIONE DELL’ATTUATORE VELIVOLO ISOLATO……….………...………...………..21
2.1 Modello Simulink per i test di risposta in frequenza sull’attuatore isolato..…..21
2.2 Risultati sperimentali……..………..25
3 TEST PRELIMINARI DI CARATTERIZZAZIONE DELL’ATTUATORE DI CARICO ISOLATO……….………...…………..30
3.1 Descrizione del funzionamento del banco……….…….30
3.2 Risultati dei test con barra rigida………...………...………..33
4 CARATTERIZZAZIONE DELLA RISPOSTA IN RIGIDEZZA DELL’ATTUATORE………..……….….37
4.1 Introduzione………...…………..……….…37
4.2 Importanza della rigidezza dinamica per un attuatore per comandi primari di volo………...………...……….38
4.3 Montaggio dell’attuatore sul banco………..……...………39
4.4 Modello Simulink di controllo Real-Time della posizione dell’attuatore…..…...41
4.5 Risultati sperimentali sulla prima configurazione di studio…………..…...……46
4.7 Test di rigidezza statica: prima configurazione di studio……….……...67
4.8 Risultati altre configurazioni di studio esaminate………..……...…………74
5 MODELLI DI SIMULAZIONE………..………..76
5.1 Interpretazione dei risultati ottenuti mediante modelli linearizzati ……….…..76
5.2 Modello Simulink dell’attuatore………...………..…84
5.3 Risultati dei test simulati………..………...….86
6 CONCLUSIONI………..………92
BIBLIOGRAFIA………...………...………..93
INTRODUZIONE
Il presente lavoro si inquadra all’interno delle attività del Dipartimento di Ingegneria Aerospaziale (DIA) dell’Università degli Studi di Pisa, nell’ambito del progetto di ricerca per lo sviluppo e la sperimentazione di comandi primari di volo con attuazione idraulica, stipulato con la società Alenia SIA.(ex Teleavio di Genova).
Gli obbiettivi del presente lavoro sono volti a definire la caratterizzazione sperimentale della risposta in rigidezza di un attuatore servoidraulico per comandi primari di volo e il confronto con i dati ottenuti mediante un modello precedentemente sviluppato.
Il sistema è composto da un attuatore velivolo servoidraulico tandem per una delle superfici di controllo di coda del velivolo Aermacchi M-346 (unico elemento
Hardware-In-The-Loop del sistema), un banco idraulico per la riproduzione dei carichi e da una
postazione di controllo costituita da due pc collegati tra loro. Il banco idraulico è alimentato da una centrale idraulica che invia il fluido idraulico ad una pressione massima di 210 bar mentre per l’attuatore velivolo si è utilizzato una pompa portatile fornita da
Alenia SIA. L’obiettivo della presente tesi è stato quello di permettere al banco idraulico di
riprodurre diverse condizioni di carico.
Nella prima parte del presente lavoro si sono effettuati test di risposta in frequenza sul pistone dell’attuatore e sulla sua servovalvola .
In seguito si sono eseguiti dei test di impedenza; poiché la dinamica del loop di controllo del carico è influenzata dal moto dell’attuatore velivolo, la caratterizzazione sperimentale è stata prima effettuata sul martinetto di carico “isolato” (sostituendo all’attuatore velivolo una barra d’acciaio di adeguata rigidezza), poi sul sistema completo.
I test sono stati eseguiti a frequenze comprese tra 1 e 80 hertz e in diverse condizioni operative (con failure idrauliche ed elettriche) e sono stati confrontati con i valori ottenuti da aziende collaboratrici. Nella seconda parte si sono ripetuti i test utilizzando un modello
Simulink dell’attuatore realizzato in precedenti ricerche sulla base di risultati ottenuti in
prove di risposta in posizione effettuate sull’attuatore stesso.
Infine con i risultati ottenuti si è tracciata la curva di rigidezza dinamica e si è valutata la validità del modello di simulazione.
1 BANCO PROVA PER LA
CARATTERIZZAZIONE DI RIGIDEZZA
1.1 Generalità
Lo studio della risposta in rigidezza dell’attuatore risulta importante per valutare il suo comportamento in presenza di disturbi statici e dinamici dovuti a fenomeni aerodinamici. Ciò è utile per verificare l’eventuale presenza di risonanze o cali di rigidezza che potrebbero pregiudicare la sicurezza del velivolo.
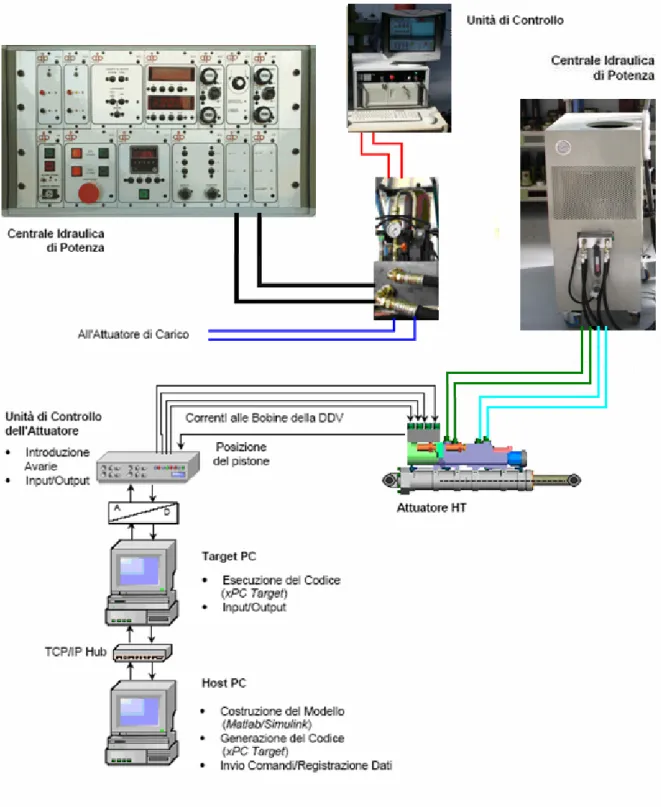
Il banco prova impiegato per l’effettuazione dei test (figura 1.1) è essenzialmente costituito dall’attuatore, dall’unità di controllo dell’attuatore e da due PC definiti rispettivamente
Host PC e Target PC connessi mediante rete TCP/IP, secondo un’architettura tipica di
sistemi di calcolo basati sull’uso del toolbox xPC Target in ambiente Matlab-Simulink. Nonostante il sistema di trasduttori adibito alla rilevazione della posizione del pistone dell’attuatore sia dotato di quattro LVDT a controllo induttivo, è riportato un unico segnale in uscita dall’attuatore. Questa rappresentazione rispecchia fedelmente quanto predisposto durante le prove sperimentali, per l’effettuazione delle quali è stato utilizzato uno solo dei quattro LVDT dell’attuatore.
1.2 Banco prova e unità di controllo
Il banco prova impiegato per i test di rigidezza e fornito dall’ industria A.I.P. Studio è costituito da una macchina servoidraulica per test di fatica su materiali. Essa comprende:
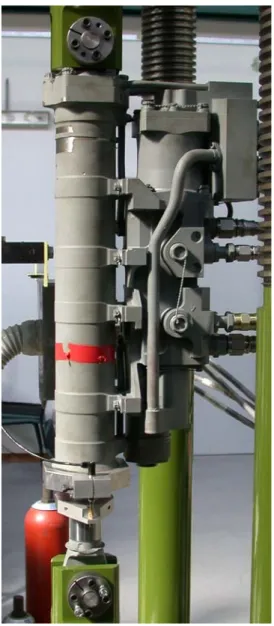
- un martinetto a singola unità idraulica (montato in linea all’attuatore velivolo) in grado di esercitare carichi fino a 10 tonnellate (figura 1.2);
- una cella di carico per rilevare la forza esercitata sull’attuatore velivolo (figura 1.3).
Figura 1.3 – Cella di carico
- un telaio in acciaio sul quale sono montati il martinetto di carico e l’oggetto di prova.
- un ’unità di controllo del banco provvista di connettori che consentono di inviare i segnali di comando al martinetto di carico e di raccogliere i segnali provenienti dai sensori: carico applicato, posizione del pistone dell’attuatore velivolo.
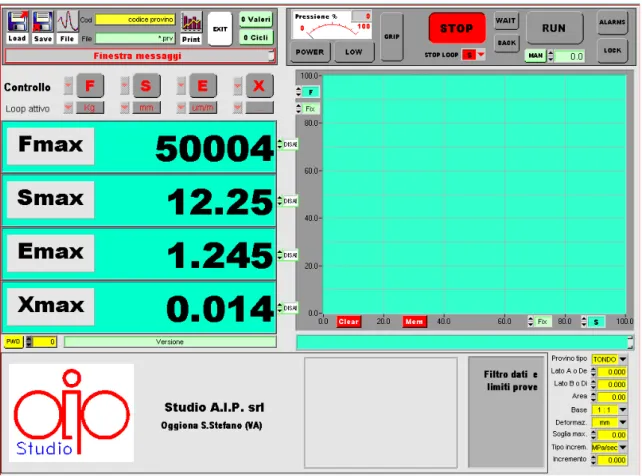
Per il controllo del martinetto si è usato un PC munito di software Workstation (figura 1.4) fornito dalla A.I.P. Studio. Questo tipo di programma permette di comandare carichi statici e dinamici e permette di lavorare sia in controllo forza che in spostamento.
Per evitare situazioni pericolose che potrebbero portare a sovraccarichi sull’attuatore sono stati messi dei controlli sul carico (gli allarmi) e sono stati settati in modo da bloccare la macchina qualora si superassero determinati valori critici.
1.3.1 Attuatore velivolo
L’attuatore, di cui sotto viene riportata un’immagine, è quello relativo allo stabilizzatore orizzontale di coda (Horizontal Tail, HT) del velivolo Aermacchi M-346 un caccia addestratore ad alte prestazioni.
L’attuatore, dotato di duplice ridondanza idraulica e quadruplice ridondanza elettrica, risulta essere un sistema 1-Fail-Operative rispetto ai guasti idraulici e 2-Fail-Operative rispetto ai guasti elettrici.
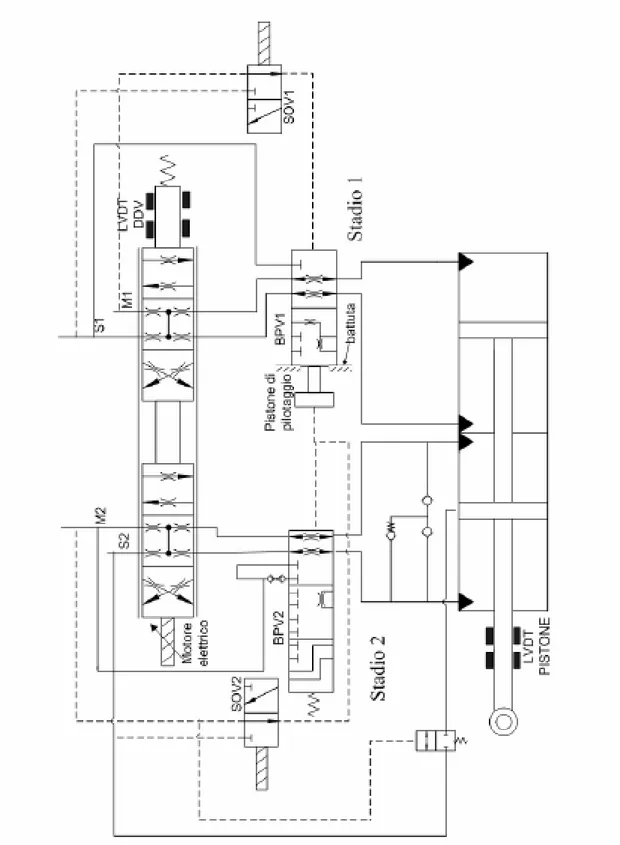
La sua struttura interna, schematicamente rappresentata in figura 1.6 in condizione operativa normale, comprende un modulo di potenza, costituito da un martinetto tandem e dall’insieme dei dispositivi di by-pass (necessari per l’isolamento degli stadi idraulici del martinetto), e da un modulo di controllo, costituito da una servovalvola proporzionale ad otto vie e da un motore elettrico lineare DDV. Per quanto concerne il funzionamento dei dispositivi di by-pass, se viene disattivata la valvola solenoide SOV1 (a seguito di un’avaria rilevata dai computer di controllo di volo), il cassetto della valvola BPV1 viene posto a contatto con la pressione di scarico dell’impianto 1, il cassetto si muove sotto l’azione del pistoncino di pilotaggio (a contatto con la pressione di mandata dell’impianto 2 ancora attivo), isola lo stadio 1 del martinetto dalla servovalvola e mette in comunicazione diretta le due camere dello stadio 1 dell’attuatore. Una cosa analoga accade se viene a disattivata la SOV2, ma in questo caso la forza necessaria a provocare il moto del cassetto viene fornita da una molla di precarico. In tal modo, anche in caso di avaria ad uno dei due impianti idraulici l’attuatore rimane operativo e le sue prestazioni rimangono sostanzialmente inalterate.
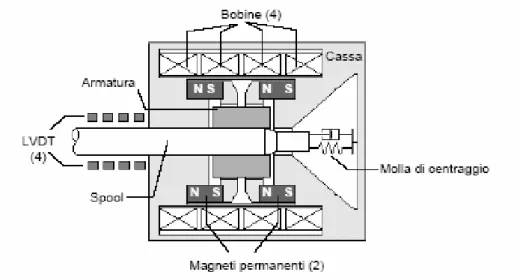
In figura 1.7 è riportato uno schema della sezione elettrica della servovalvola DDV. Essa è costituita di un motore elettrico lineare a magneti permanenti (Linear Force Motor, LFM) con quattro bobine di eccitazione e di quattro trasduttori induttivi LVDT per la rilevazione della posizione del cassetto di distribuzione (spool) della servovalvola.
Figura 1.7 - Schema semplificato dell'architettura interna del motore elettrico DDV (modulo di controllo)
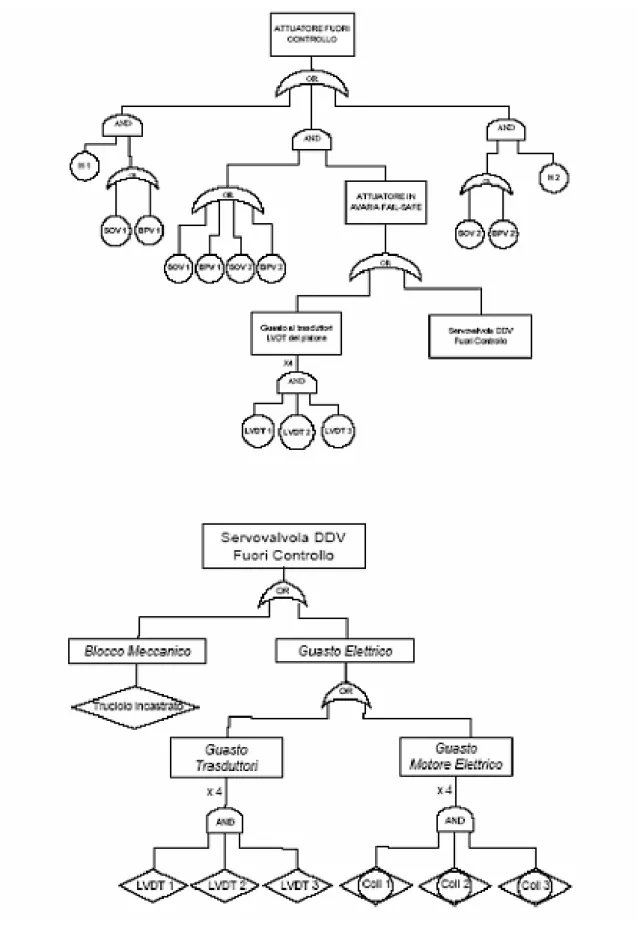
Come si può notare analizzando l’albero dei guasti (figura 1.8), la completa perdita di controllo è provocata dal malfunzionamento dei dispositivi di by-pass; mentre, se tali dispositivi funzionano correttamente, le avarie ai sottosistemi dell’attuatore possono al più determinare una condizione operativa di Fail- Safe in cui l’attuatore risulta bloccato in posizione neutra (coincidente cioè con una deflessione nulla della superficie di controllo) oppure nella posizione che possedeva immediatamente prima dell’avaria. L’avaria di servovalvola può essere causata da un blocco meccanico del cassetto oppure da un guasto elettrico.
Un guasto elettrico può invece essere determinato da un guasto dell’intero blocco dei trasduttori di posizione oppure da un guasto del motore elettrico.
I quattro computer di controllo del volo sottopongono le tensioni elettriche in uscita dal sistema dei quattro trasduttori e i quattro segnali di corrente in uscita dal LFM ad un monitoraggio per confronto (cross-lane monitoring), per cui la perdita di funzionalità del sistema di trasduttori o del LFM si verifica solo se si rompe una qualsiasi combinazione di tre elementi su quattro.
Il controllo dell’attuatore HT è realizzato mediante due cicli chiusi: uno sulla posizione dello spool della DDV ed uno sulla posizione del pistone dell’attuatore. I due loop di controllo sono operati (nella realtà) dalle schede AIM d’interfaccia dell’attuatore e sono elaborati con una diversa frequenza di campionamento (1200 Hz per il loop sulla DDV e 600 Hz per il loop sul pistone).
1.3.2 Montaggio dell’attuatore sul banco
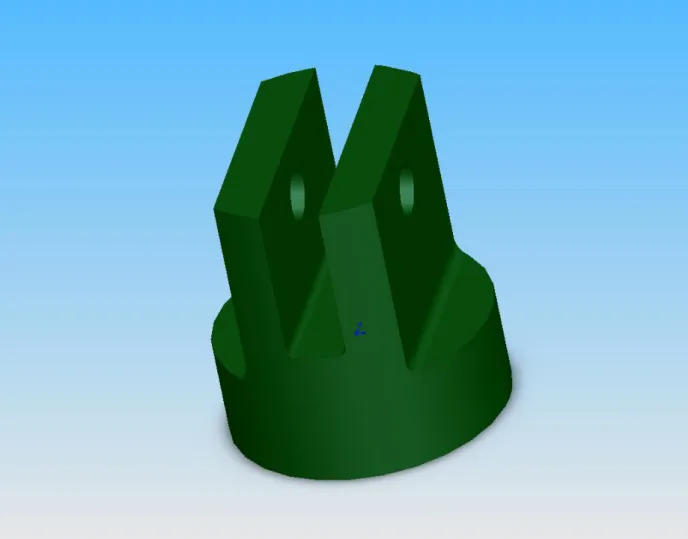
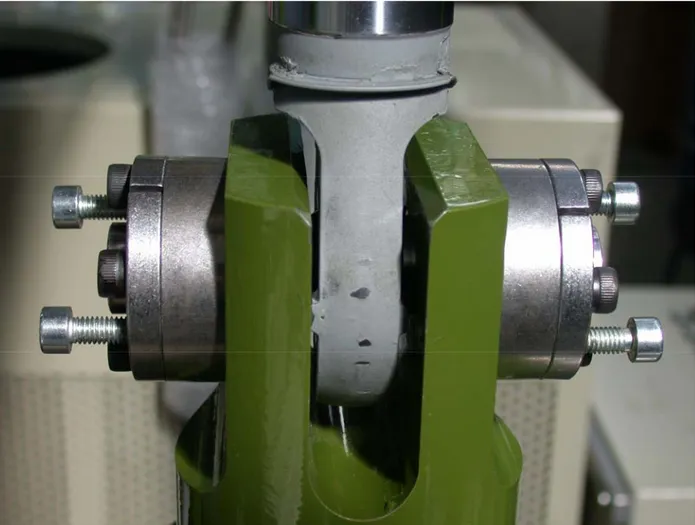
Per eseguire i test è stato innanzitutto necessario disegnare una forcella di afferraggio (figura 1.9) che si potesse interfacciare con la cella di carico del martinetto.
Poi si è studiato un sistema di fissaggio facilmente smontabile in grado di eliminare i possibili giochi tra perno, cerniera sferica dell’attuatore e forcella di afferraggio. La scelta migliore è stata quella di realizzare due boccole coniche autocentranti provviste di distanziale e viti di serraggio in grado di forzare il perno nel suo alloggiamento ed assicurare un perfetto collegamento con il resto della struttura (figura 1.10). Il perno, che si accoppia con interferenza alla cerniera dell’attuatore, viene montato con dei leggeri colpi di mazzuolo.
1.3.3 Strumenti per il rilevamento degli spostamenti dell’attuatore
Per rilevare le piccolissime oscillazioni dell’attuatore si è utilizzato un trasduttore di posizione LVDT esterno in grado di valutare spostamenti di in trazione e in compressione pari a 1 mm e si è collegato ad un rilevatore in grado di leggerne il segnale.
La calibrazione del trasduttore è stata effettuata con un calibratore (figura 1.11) ed ha evidenziato margini di errore molto piccoli (dell’ordine dello 0.1%).
Il trasduttore è stato poi collegato all’attuatore tramite due supporti realizzati presso l’officina di Strutture Aeronautiche del DIA (figura 1.12).
Trasduttore esterno
Supporti di collegamento
1.4 Centrali di potenza idraulica
Il banco e l’attuatore sono stati alimentati da due centrali idrauliche diverse.
L’attuatore è alimentato da una pompa portatile a due linee di alimentazione fornita dai tecnici di Alenia SIA in grado di erogare una portata massima di 7.5 litri al minuto ad una pressione compresa tra 0 e 210 bar.
1.5 Descrizione della postazione prova
Per potere comandare l’attuatore si fa uso di un opportuno modello Simulink che viene compilato ed inviato, tramite rete Ethernet , al computer dell’unità di controllo del banco, che funge da Target, mediante il toolbox di Matlab xPC Target. Il segnale digitale viene trasformato dal Target in un segnale analogico (una corrente elettrica) e viene passato all’attuatore (figura 1.14). Con lo stesso procedimento logico è possibile acquisire il segnale e visualizzarlo nell’Host PC.