Universit`
a di Pisa
Facolt`
a di Ingegneria
Laurea Specialistica in Ingegneria dell’Automazione
Tesi di Laurea Specialistica
Progetto e realizzazione dell’hardware
per un autopilota general purpose
Candidato:
Michele FRANCHI . . . .
Relatore:
Prof. Ing. Lorenzo POLLINI . . . . Prof. Ing. Mario INNOCENTI . . . .
Sessione di Laurea del 18/12/2008 Anno Accademico 2008/2009
Universit`
a di Pisa
Facolt`
a di Ingegneria
Laurea Specialistica in Ingegneria dell’Automazione
Tesi di Laurea Specialistica
Progetto e realizzazione dell’hardware
per un autopilota general purpose
Candidato:
Michele FRANCHI . . . .
Relatore:
Prof. Ing. Lorenzo POLLINI . . . . Prof. Ing. Mario INNOCENTI . . . .
Sessione di Laurea del 18/12/2008 Anno Accademico 2008/2009
Dedico questo lavoro a Dingo,
amico immaginario.
Indice
1 Introduzione 1 1.1 Le esigenze . . . 2 1.1.1 Periferiche e sensori . . . 3 1.2 Specifiche ed Obiettivi . . . 14 2 Progettazione e Realizzazione 17 2.1 Scelta dei processori . . . 172.2 Connessioni processori . . . 19
2.3 Scelta componenti. . . 23
2.4 Signal Integrity . . . 26
2.4.1 La riflessione del segnale . . . 27
2.4.2 La diafonia . . . 27
2.4.3 Collasso del PDS . . . 29
2.4.4 Le EMI . . . 29
2.5 Disegno del PCB . . . 31
3 Lo sviluppo del firmware 36 3.1 Firmware Pic . . . 36 3.2 Firmware dsPic . . . 37 3.3 Firmware phyCORE -MPC565R . . . 38 3.4 Confronto Filtri . . . 40 4 Conclusioni 42 A Schemi 43 A.1 Low Voltage Logic Threshold Levels. . . 43
A.2 Schema logico ICARO . . . 45
B Introduzione ai PCB 46 B.1 La scheda PCB . . . 46
B.2 La progettazione . . . 47 2
C Il pacchetto OrCAD 52
C.1 Il software utilizzato . . . 52
C.2 Orcad Capture . . . 54
C.3 Le librerie in Orcad . . . 57
C.4 Moduli Ausiliari. . . 58
C.5 Orcad Capture CIS . . . 59
C.6 DRC e netlist . . . 60
C.7 Orcad Layout e moduli ausiliari . . . 62
Bibliografia 64
Sommario
Il presente lavoro tratta la progettazione e lo sviluppo di un sistema hard-ware embedded necessario per l’implementazione di sistemi di controllo su velivoli/veicoli autonomi.
Sulla base di specifiche riguardanti il carico computazionale, le dimensioni fisiche, le periferiche da utilizzare e l’energia a disposizione `e stata progettata una scheda elettronica, denominata ICARO. Il dispositivo realizzato perme-tte di pilotare in modalit`a manuale, assistita o autonoma tipologie diverse di velivoli/veicoli, ed ha la capacit`a di interfacciarsi con sensori e periferiche di vario genere. La sua principale particolarit`a `e la presenza di due unit`a di calcolo indipendenti ideate per ottenere un maggior grado di sicurezza. Bench`e sia stata ideata per rispndere ai problemi di controllo specifici di veliv-oli e veicveliv-oli, la sheda realizzata rappresenta un prodotto quanto pi`u flessibile possibile e quindi si rivela utile in tutte quelle situazioni in cui si presenta la necessit`a di disporre di una unit`a di controlo relativamente performante.
Capitolo 1
Introduzione
Lo sviluppo di questa tesi nasce dall’esigenza di disporre di un dispositivo elettronico programmabile, facilmente interfacciabile con sensori e periferiche esterne di vario tipo predefinite, che permetta l’implementazione di algoritmi di controllo per la guida in autonomo di velivoli/veicoli.
Il lavoro ha portato alla realizzazione di una scheda elettronica, denomina-ta ICARO, che si caratterizza per flessibilit`a, sicurezza, compattezza e bassi consumi.
Partendo da un particolare caso di applicazione sono state fissate delle speci-fiche base per il progetto, in seguito affinate e generalizzate in funzione dello sviluppo dei lavori; questo processo di revisione ed adattamento continuo ha permesso di ottenere un prodotto particolarmente flessibile e quindi riutiliz-zabile in problemi di controllo del tutto generici.
La presenza di due unit`a di calcolo distinte, indipendenti ma in grado di sostituirsi l’una all’altra, garantisce maggiori standard di sicurezza.
Le dimensioni ridotte della scheda, 90mm x 70mm x 25mm (L x W x H), offrono la possibilit`a di installarla senza problemi in qualsiasi luogo.
Infine, la potenza richiesta, non considerando l’alimentazione di periferiche o sensori aggiuntivi, `e di circa 3,75W (5V @0.75mA) riducibili qualora non si necessiti della piena potenza di calcolo; ci`o consente l’utilizzo di batterie con potenze relativamente basse per applicazioni mobili.
Nelle successive sezioni di questo capitolo si illustreranno pi`u in dettagglio le esigenze che hanno spinto alla realizzazione di questo progetto, le specifiche iniziali e gli obiettivi prefissati.
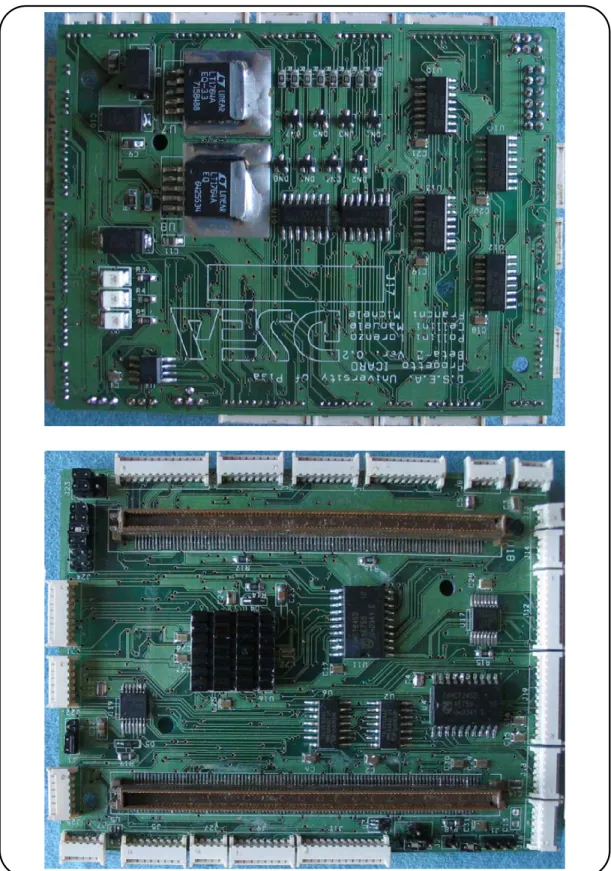
Figura 2.17: Risultato della fase di assemblaggio della scheda 35
Bibliografia
[1] Eric Bogatin. Signal Integrity - Simplified (Prentice Hall Modern Semi-conductor Design Series’ Sub Series: PH Signal Integrity Library). Prentice Hall PTR, 9 2003.
[2] Howard Johnson. High Speed Signal Propagation: Advanced Black Mag-ic (PrentMag-ice Hall Modern SemMag-iconductor Design Series’ Sub Series: PH Signal Integrity Library). Prentice Hall PTR, 3 2003.
[3] Clyde F. Coombs. Printed Circuits Handbook (McGraw Hill Handbooks). McGraw-Hill Professional, 6 edition, 8 2007.
[4] Charles L. Phillips and H. Troy Nagle. Digital Control System Analysis and Design (3rd Edition). Longman Higher Education, 3rd edition, 2000. [5] Technical notes.
[6] Technical notes.
[7] Mohinder S. Grewal, Lawrence R. Weill, and Angus P. Andrews. Global Positioning Systems, Inertial Navigation, and Integration. Wiley-Interscience, December 2000.
[8] Robert W. Erickson and Dragan Maksimovic. Fundamentals of Power Electronics (Second Edition). Springer, 2nd edition, 1 2001.