D
IPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALERELAZIONE PER IL CONSEGUIMENTO DELLA LAUREA MAGISTRALE IN INGEGNERIA MECCANICA
Modello per il Comportamento di Trasmissioni
Epicicloidali di Potenza in Presenza di Giochi
RELATORI IL CANDIDATO
Prof. Ing. Marco Beghini Dario Filippi
Dipartimento di Ingegneria Civile e Industriale [email protected]
Dott. Ing. Bernardo Disma Monelli
Dipartimento di Ingegneria Civile e Industriale
Dott. Michele Barsanti
Dipartimento di Ingegneria Civile ed Industriale
Sessione di Laurea del 09/07/2014 Anno Accademico 2013/2014 Consultazione NON consentita
1 Indice
1 Introduzione ... 5
1.1 Geared TurboFan ... 6
1.2 Banco prova GTFTR ... 8
1.2.1 Il ricircolo meccanico di potenza ... 9
1.2.2 Sistema di applicazione dei carichi ... 10
2 Introduzione ai rotismi epicicloidali ... 12
2.1 Riduttore epicicloidale ... 12
2.2 Il gioco negli ingranaggi a denti dritti ... 14
2.3 Importanza del gioco tra i denti degli ingranaggi ... 15
2.4 L’ingranamento ... 16
2.5 Caratteristiche di un rotismo epicicloidale ... 17
3 Generalità sui modelli a parametri concentrati ... 17
4 Modello a parametri concentrati per il riduttore esaminato ... 19
4.1 Nomenclatura ... 19
4.2 Definizioni, ipotesi del modello e giustificazione ... 21
4.2.1 Modello 2D ... 22
4.2.2 Portasatelliti rigido ... 23
4.2.3 Rigidezza di ingranamento ... 24
4.2.4 Angolo di pressione costante ... 24
4.2.5 Assenza effetti di attrito ... 24
2
4.3 Parti deformabili nel modello ... 24
4.4 Calcolo delle forze sulla dentatura ... 26
4.5 Calcolo degli spostamenti sulla linea dei contatti del fianco ozioso ... 29
4.6 Condizioni di equilibrio e carichi ... 30
4.7 Solutore utilizzato e la verifica delle condizioni ... 31
4.8 Stima dei parametri da inserire nel modello ... 33
5 Analisi dei risultati ... 36
5.1 Deformazioni e spostamenti ... 36
5.2 Carichi sui denti ... 39
5.2.1 Modalità di lettura dei grafici ... 39
5.2.2 Grafici ottenuti a bassa coppia ... 40
6 Software sviluppato ... 44
6.1 Struttura del programma ... 44
6.2 Manuale d’uso ... 45
7 Conclusioni ... 46
Bibliografia ... 47 Appendice A: Relazioni fra il gioco, l’interasse tra le ruote e gli spessori dei denti
Appendice B: Metodologia per la determinazione dei parametri di rigidezza
3
Sommario
Scopo di questa tesi è lo sviluppo di un modello a parametri concentrati di un riduttore planetario mirato alla stima delle forze agenti sulla dentatura e allo studio dei problemi della perdita di contatto e incuneamento dei denti delle ruote. Diversamente da altri lavori esistenti in letteratura, che analizzano il comportamento dei riduttori in presenza di carichi di coppia ed errori di montaggio, nel seguente lavoro è stata svolta un’ analisi statica che prende in considerazione il disassamento delle strutture di supporto dei componenti del riduttore. Il modello sviluppato è stato implementato in un programma in ambiente Matlab©. Tale programma è in grado di stimare il carico agente su ogni satellite, anche in presenza di fenomeni di separazione tra i denti. Il software valuta, inoltre, le condizioni di funzionamento per le quali si ha contatto su entrambi i fianchi del dente.
Abstract
Purpose of this work is the development of a lumped model of planetary gears, for the estimation of the forces on the gear teeth and for the investigation of the problem of contact losses and tooth wedging. Differently from previous works, which analyzed the behavior of gears with torque and assembly error, this model takes into consideration the effects of parallel offset between the input and outputs shafts on the load sharing factor. The mathematical model is implemented in Matlab© environment. The code estimates the mesh forces on each planet and it can determine the load on each planet. The operating conditions at which wedging is not present can be computed.
5
1 Introduzione
Scopo di questo lavoro è lo sviluppo di un modello a parametri concentrati di un riduttore epicicloidale che consenta di stimare le forze agenti sulla dentatura e di studiare i problemi della perdita di contatto fra i denti delle ruote e dell’incuneamento dei denti dei satelliti.
I carichi esaminati nel modello sono una coppia e una forza agente sul portasatelliti e sull’albero del solare causata dal disassamento tra gli alberi.
Tale studio è inserito all'interno del progetto GeTFuTuRe che ha per finalità quella di costruire un banco per eseguire prove di durata su riduttori.
Il modello sviluppato è quindi uno strumento utile per progettare il banco, poiché la cedevolezza del riduttore influenza i carichi su diversi componenti del banco quali, ad esempio cuscinetti, alberi e trasmissione nella zona di prova.
6
1.1 Geared TurboFan
Il turboreattore è nato come motore per impieghi aeronautici in conseguenza dell'elevato rapporto potenza/massa.
Nelle turbine a gas utilizzate come motori a reazione, la potenza è ottenuta come spinta impressa all'aeromobile.
Per la conversione di energia termica in lavoro meccanico, l'impianto di turbina a gas segue un ciclo termodinamico che è approssimabile con il ciclo ideale di Joule-Brayton.
La turbina serve unicamente a fornire la potenza necessaria al compressore. All'uscita della turbina il fluido possiede ancora una notevole sovrapressione rispetto all'ambiente e questa differenza di pressione è utilizzata per accelerare il fluido stesso. La spinta è quindi ottenuta per reazione.
Considerando che il fluido esca dall'ugello propulsivo dopo aver compiuto una espansione completa fino alla pressione ambiente, la spinta totale Fa sarà data da:
Spinta totale
F
a
m
(
v
u
v
a)
dove
m è la portata massica
v
u è la velocità del fluido operativo in uscita dall'ugello
v
a è la velocità del fluido operativo in ingresso al turboreattore7 e quindi una potenza persa pari a
2
)
(
u a 2 pv
v
m
P
.Il rendimento propulsivo è scrivibile come
p tot tot p P P P e quindi a u p v v 1 2 .
Di conseguenza, per aumentare la spinta, è più conveniente aumentare la portata massica piuttosto che aumentare la differenza di velocità tra fluido in ingresso e fluido in uscita.
Per tale motivo sono stati sviluppati i motori turbofan. Essi sono dotati in ingresso al turbo reattore di un compressore assiale a uno o due stadi che elabora una grande portata massica a velocità ridotta. Tale fluido non partecipa al ciclo termodinamico, ma viene inviata direttamente ad un ugello propulsivo.
Il trascinamento di tale compressore può avvenire con due soluzioni costruttive:
1. Connessione diretta all'albero del turboreattore, individuando un regime di rotazione di compromesso tra le esigenze del turboreattore e del fan (limitando così il rendimento di tipo energetico).
2. Connessione tramite un riduttore all’albero del turboreattore, in modo da poter mantenere i regimi di rotazione ottimali sia per il fan che per il turboreattore. In questo modo è possibile aumentare sia rendimento propulsivo che il rendimento energetico [1].
8
1.2 Banco prova GTFTR
Una fase importante post progettazione dei riduttori è il test di alcuni prototipi. Il test consiste nell’eseguire prove di endurance in varie condizioni di carico verificando la buona progettazione di tale componente.
Questo banco (vedi figura 1) rende possibile la simulazione della cedevolezza delle strutture aeronautiche, riproducendo il disassamento tra gli alberi del riduttore.
Il banco utilizzato è del tipo a ricircolo meccanico di potenza, ed è in grado quindi di sollecitare il rotismo sottoponendolo a una coppia e ad una forza, creando un disassamento tra corona e portasatelliti.
Il banco è composto da un motore per il reintegro della potenza persa per attrito, un moltiplicatore di giri e una sezione di prova.
Figura 1: Banco prova GTFTR
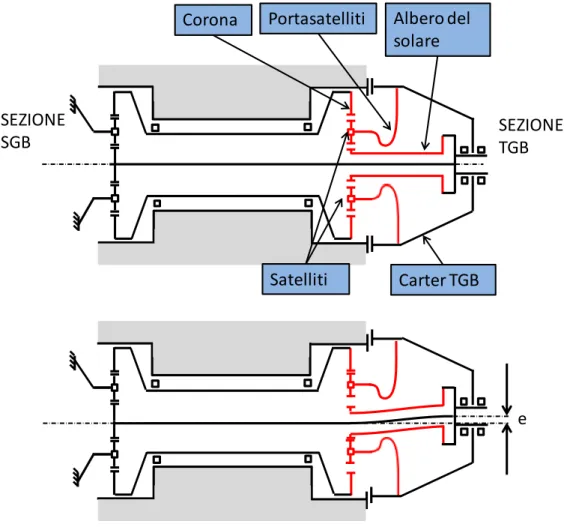
Più nel dettaglio (vedi figura 2) la sezione di prova è composta da una parte in cui è posizionato il riduttore di servizio necessario per il ricircolo meccanico di potenza, e da una parte dove avviene la prova vera e propria in cui è posizionato il riduttore sottoposto a disassamento. L’applicazione dei carichi, coppia e disassamento (vedi
9 figura 2) è resa possibile dalla presenza di apparati collegati al carter della sezione di prova.
Figura 2: Dettaglio e schema della sezione di prova del GTFTR.
1.2.1 Il ricircolo meccanico di potenza
La necessità di progettare un sistema per testare e trasmissioni a elevate potenze contenendo i costi di esercizio ha portato all'utilizzo di un sistema a ricircolo di potenza meccanica.
Tale tipo di ricircolo permette di implementare un collegamento a circuito chiuso tra una trasmissione di prova e una di servizio identiche, questo consente di poter dimensionare il motore semplicemente basandosi sulla potenza dissipata dai
Disassamento Riduttore di Servizio Carter Lato Prova Riduttore di Prova Sistema applicazione della coppia Ralle per applicazione della coppia e eccentricità Sistema applicazione dell’ eccentricità
10 cinematismi. Essendo i rendimenti di questi sistemi molto elevati, non si necessita di motori di potenza elevata [2].
1.2.2 Sistema di applicazione dei carichi
Dallo schema di figura 2, si nota che il banco utilizza due riduttori epicicloidali identici in configurazione ordinaria.
Figura 3 :Schema del banco con carter .
Le corone del riduttore sono collegate tra di loro tramite un albero, lo stesso avviene per i solari. Il portasatelliti del riduttore di servizio (vedi figura 3) è fissato al telaio SGB (Slave Gear Box) mentre il portasatelliti del riduttore in prova, e l’albero del solare sono collegati ad un carter denominato "TGB" (Test Gear Box) dotato di ralle e attuatori idonei alla messa in coppia dell’apparato e alla generazione del disassamento. Il carter TGB quindi, una volta azionato, trascinerà con se l'albero del
e SEZIONE SGB SEZIONE TGB Carter TGB Satelliti Albero del solare Portasatelliti Corona
11 solare e il portasatelliti (un maggior dettaglio del meccanismo di applicazione dei carichi è fornito dalla figura 4).
La potenza dissipata è reintegrata sull’albero dei solari.
12
2 Introduzione ai rotismi epicicloidali
I problemi da analizzare in questo contesto sono l’ingranamento e il gioco circonferenziale dei riduttori epicicloidali.
2.1 Riduttore epicicloidale
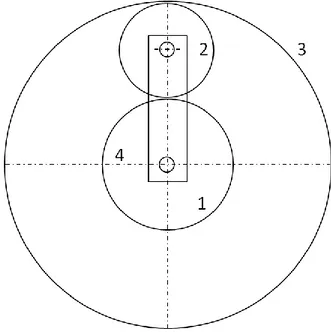
Lo schema di un rotismo epicicloidale è il seguente [3]:
Figura 5: Schema del rotismo epicicloidale.
Esso è composto da quattro membri principali: tre ruote ed un quarto membro accoppiato rotoidalmente alle ruote 1 e 2. La ruota 1 (solare) è vincolata rotoidalmente ai membri 3 (corona) e 4 (portasatelliti) e con coppia superiore alla ruota 2 (satellite); questa è vincolata rotoidalmente al membro 4 e con coppia superiore alle ruote 1 e 3; la ruota 3, infine, è vincolata con coppia superiore alla ruota 2 e con coppia rotoidale alla ruota 1.
Tale meccanismo così presentato ha 2 gradi di libertà. Quindi si possono identificare 3 condizioni di funzionamento:
13 Configurazione ordinaria: L'elemento portasatelliti è fisso e tutti gli altri
membri possono ruotare.
Configurazione epicicloidale: la corona è l'elemento fisso e tutti gli altri membri sono liberi.
Differenziale il rotismo rimane a 2 gradi di libertà
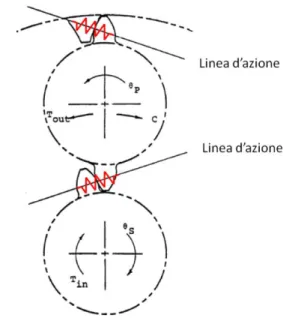
Per quanto riguarda le direzioni delle rette d'azione, cioè quel luogo geometrico su cui si sposta il punto di contatto durante l’ingranamento, nella configurazione ordinaria e epicicloidale si nota che nel primo caso queste sono incidenti, nel secondo invece sono parallele (vedi figura 6).
Figura 6: Rette d'azione nella configurazione ordinaria ed epicicloidale.
La configurazione utilizzata nelle prove che saranno effettuate è con il portasatelliti fisso.
Nella catena cinematica, quindi, il portasatelliti funge da telaio (il rotismo è ordinario). La ruota 1 sia il movente del rotismo di figura 5; essa, ruotando, pone in
14 movimento la ruota 2, la quale, in questa configurazione, ha l'asse fisso e trasmette il moto al membro 3, che funge da cedente.
Se indichiamo con τ0 il rapporto tra la velocità angolare dell'ultima ruota e la velocità
angolare della prima ruota otteniamo la formula di Willis:
Dove ωn è la velocità angolare dell'ultima ruota, ω1 è la velocità angolare della prima
ruota e ωp è la velocità angolare del portasatelliti.
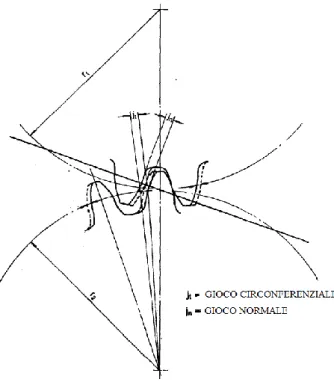
2.2 Il gioco negli ingranaggi a denti dritti
Il gioco circonferenziale può essere definito come la larghezza in eccesso tra due denti in contatto misurata sulla circonferenza primitiva; analogamente, il gioco normale è misurato lungo la linea dei contatti.
Tale gioco è necessario per un corretto funzionamento del riduttore.
15 Un'attenta valutazione del gioco è fondamentale per avere un corretto e più silenzioso funzionamento degli ingranaggi di potenza. Tale gioco evita, a causa di errori di montaggio lavorazione e deformazioni, che si abbiano inceppamenti o che il contatto avvenga su entrambi i fianchi del dente, condizione che provocherebbe perdite di rendimento.
2.3 Importanza del gioco tra i denti degli ingranaggi
Giochi troppo piccoli possono portare a sovraccarichi della struttura quindi al danneggiamento delle ruote e vibrazioni. Giochi eccessivi possono portare invece a trasmissione del moto non uniforme dovuta al fatto che il gioco varia da coppia di denti a coppia di denti per errori di costruzione ed è causa di eccessivi rumori specialmente nel caso di ingranaggi reversibili.
Nella scelta del gioco molti fattori devono essere tenuti in considerazione come le condizioni di funzionamento, lo spessore dei denti, il gioco tra diametro di testa e piede, il tipo di profilo e l'angolo d'elica. Comunque si deve far notare che questo non inficia il funzionamento dell'evolvente.
Il gioco è ottenuto affondando di più l'utensile dentatrice sulla ruota, ma si crea anche nel caso di allontanamento dei centri di rotazione delle ruote.
16
2.4 L’ingranamento
Figura 8: Condizione di ingranamento.
Durante l’ingranamento delle ruote, dentate il punto geometrico di contatto tra due generici denti si sposta su di un segmento appartenente a una retta, indicata con γ, e chiamata retta dei contatti, il segmento su tale retta è detto di arco di ingranamento ed è delimitato dai punti N1 e N2, intersezioni della retta γ con le circonferenze di testa delle due ruote. Durante il moto del punto di contatto dal punto N1 al punto N2, le due primitive σ1 e σ2 rotolano su di un arco s, denominato arco di azione. Esiste
una relazione tra il passo di una ruota e la lunghezza dell’arco di azione, tale relazione prende il nome di condizione di continuità del moto e si esprime analiticamente attraverso la relazione:
s ≥ p
Dove con p si è indicato il passo della ruota dentata. Se non si verificasse tale condizione (ad esempio risultasse che p > s), ciò significherebbe che in un arco di lunghezza p-s non si avrebbero denti in presa e quindi il moto della ruota dentata
17 risulterebbe discontinuo, cosa che non è accettabile.
2.5 Caratteristiche di un rotismo epicicloidale
I rotismi epicicloidali sono caratterizzati dalla possibilità di generare alti rapporti di riduzione in volumi molto piccoli.
Inoltre, nel caso di trasmissione di elevate potenze, tali riduttori sono utilizzati poiché la configurazione coassiale fa sì che le forze radiali o tangenziali siano autoequilibrate all’esterno diminuendo così i carichi sui cuscinetti.
I riduttori epicicloidali hanno infine il vantaggio che gli elementi centrali sono soggetti ad autocentramento, ciò permette di limitare l’effetto di errori di produzione o montaggio. Ma il fatto che la struttura sia comunque relativamente rigida fa sì che le deformazioni, gli errori di montaggio dei satelliti e del portasatelliti e i giochi presenti nel riduttore provochino una deviazione dei profili dei denti dalla posizione nominale comportando una diversa partecipazione dei vari pianeti a equilibrare la coppia in ingresso al sistema.[5]
3 Generalità sui modelli a parametri concentrati
In letteratura esistono numerosi modelli a parametri concentrati utilizzati per valutare il comportamento di riduttori epicicloidali.
L’approccio solitamente utilizzato consiste nel modellare il contatto tra i denti come una molla tangente alle circonferenze di base, quindi diretta lungo la retta di azione.
Tramite la legge di Hooke, è possibile calcolare la forza di contatto conoscendo la differenza degli spostamenti proiettati lungo la linea dei contatti [6].
18 Lo stesso tipo di approccio è utilizzato anche da Parker in [7].
Figura 9: Schematizzazione del modello di deformabilità dei denti.
In [8], Parker introduce la possibilità che durante il funzionamento si possa avere il contatto su entrambi i fianchi del dente, tale studio permette quindi di dimensionare correttamente il gioco tra i denti.
Tale condizione di doppio contatto viene controllata verificando che gli spostamenti proiettati lungo la linea d’azione sul fianco ozioso siano maggiori di Bp cos( dove
Bp è il gioco misurato lungo la circonferenza primitiva e l’angolo di pressione.
19
4 Modello a parametri concentrati per il riduttore esaminato
Il software sviluppato implementa un modello a parametri concentrati. Tale modello è in grado di calcolare il carico che agisce su ogni satellite, anche in presenza di separazione tra i denti, quali satelliti sono in contatto, e di determinare le condizioni per le quali si ha il doppio contatto.Le variabili in ingresso a tale sistema sono il verso, la direzione di applicazione e l’ampiezza del disassamento e la coppia. I parametri che caratterizzano la trasmissione le rigidezze dei vari componenti, la geometria del rotismo, l’errore di montaggio circonferenziale dei perni dei satelliti e le deformabilità dei componenti considerati, che sono state rappresentate tramite molle opportunamente collegate ai corpi rigidi.
4.1 Nomenclatura
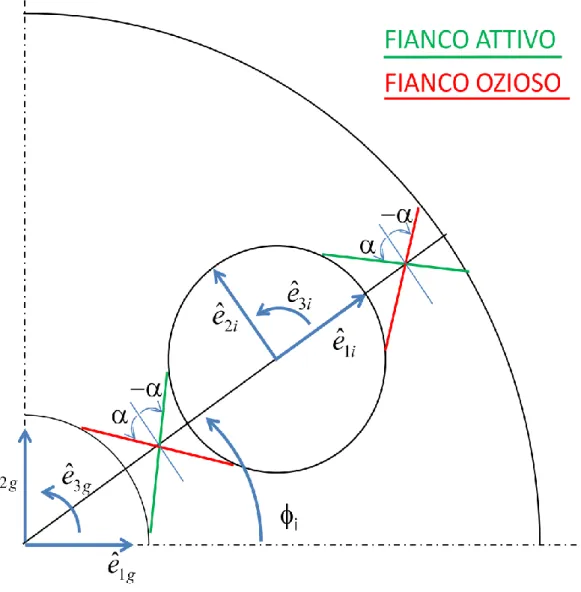
In questa analisi la nomenclatura utilizzata sarà la seguente (vedi figura 11).
Alle posizioni dei centri e alle rotazioni dei vari componenti saranno assegnati i simboli
x
(j),
y
(j),
(j) dove jc,r,s per il portasatelliti (carrier), alla corona (ring) e il solare (sun); queste coordinate sono riferite al sistema di riferimento principaleeˆ
g solidale al telaio con origine sull’asse del riduttore indeformato.Alle posizioni dei centri e alle rotazioni dei satelliti saranno assegnati i simboli
) ( ) ( ) (
,
,
ip ip p iy
x
dove p sta per satellite (planet) e i è il numero identificativo del satellite in questione quindii
1
,...,
n
p doven
p è il numero di satelliti del riduttore. Le coordinate in questo caso sono riferite ai sistemi di riferimentoe
ˆ
1ie
ˆ
2ie
ˆ
3i che20 sono mobili rispetto al sistema di riferimento principale, fissati sui satelliti, con origini nel centro di ciascun staellite.
Tali sistemi di riferimento sono individuati dall’angolo i tra i versori
e
ˆ
1g ee
ˆ
1i.L’angolo di pressione fra i denti in contatto è indicato con .
Figura 11: Sistemi di riferimento.
Inoltre sono stati utilizzati i seguenti simboli per identificare tali parametri visibile in Tabella 1.
21
Parametro Simbolo
Rigidezza a taglio della campana
k
b
Rigidezza a torsione della campana b Rigidezza a taglio dell’albero del solare ki
Rigidezza a torsione dell’albero del solare i
Rigidezza di ingranamento kt
Numero dei satelliti n
p
Angolo di pressione
Raggio di base del solare
r
s
Raggio di base della corona rr
Raggio di base dei satelliti rp
Raggio del portasatelliti rc
Gioco circonferenziale bp
Tabella 1: Definizione dei parametri
4.2 Definizioni, ipotesi del modello e giustificazione
Il rotismo epicicloidale oggetto dello studio è composto da un solare, una corona e 5 satelliti i cui perni sono calettati su un portasatelliti rigido (vedi figura 12).
22
Figura 12: Geometria rotismo epicicloidale.
Le ipotesi su questo modello sono: Modello 2D
Portasatelliti rigido
Rigidezza di ingranamento costante Angolo di pressione costante Assenza degli effetti di attrito Giochi assenti e cuscinetti rigidi 4.2.1 Modello 2D
23 Desiderando una ripartizione uniforme del carico sulla dentatura, si cerca di sviluppare delle soluzioni costruttive, relative alla scelta dei cuscinetti e al montaggio delle ruote, che seguano questa direzione.
4.2.2 Portasatelliti rigido
L’ipotesi di rigidità del portasatelliti è molto forte, ma è stata introdotta per motivi di semplicità. Futuri sviluppi di questo lavoro rimuoveranno questa ipotesi inserendo la matrice di rigidezza di tale elemento.
Analizzando i disegni del banco di prova (vedi figura 2), come già discusso in 1.2.2, si nota che tramite il carter TGB viene applicata la coppia al portasatelliti. Sempre tramite il carter TGB viene inserito nel sistema un disassamento (parallel offset P.O.) che agisce sul portasatelliti e sull'albero del solare.
24 4.2.3 Rigidezza di ingranamento
La variazione della rigidezza di ingranamento è dipendente dal numero di denti in contatto, quindi delle rotazioni delle ruote. Essendo le rotazioni dell’ordine dei primi di grado, si può considerare la rigidezza di ingranamento costante.
4.2.4 Angolo di pressione costante
La variazione dell’angolo di pressione dipende dalle variazioni dell’interasse tra due ruote. Poiché gli spostamenti degli assi sono dell’ordine del 1/10 mm è stata valutata una variazione dell’angolo di pressione di pochi decimi di grado, del tutto ininfluente al fine del calcolo delle forze sulle dentature. Di conseguenza l’ipotesi di angolo di pressione costante è ragionevole.
4.2.5 Assenza effetti di attrito
Grazie alla realizzazione di sofisticati sistemi di lubrificazione, l’efficienza di questi riduttori è elevatissima. Si considera quindi nullo il coefficiente di attrito.
4.2.6 Giochi e rigidezze dei cuscinetti
La rigidezza di tali componenti non sono state considerate poiché sono decisamente più elevate della rigidezza del portasatelliti, che è stato considerato perfettamente rigido.
4.3 Parti deformabili nel modello
Le deformabilità inserite nel modello sono: deformabilità dei denti
deformabilità degli alberi
Le deformabilità dei denti sono state modellate con delle molle unidirezionali inclinate lungo la retta di azione con rigidezza pari a quella dell’ingranamento.
25 Considerando una coppia con verso negativo e funzionamento ordinario, possiamo collocare le molle come mostrato in figura 14.
Figura 14: Deformabilità dei denti.
Per quanto riguarda le deformabilità degli alberi sono state inserite due molle (bidirezionali) dirette lungo gli assi x e y, con rigidezza pari a quella del rispettivo albero. Le molle della campana sono state collegate al telaio. La molla dell’albero del solare diretta lungo la direzione dell’offset è collegata allo spostamento del carter TGB quindi al portasatelliti, l’altra molla è invece collegata direttamente al telaio (vedi figura 15).
Per rendere possibile l’equilibrio dei momenti, sono state inserite le rigidezze torsionali dei due alberi.
26
Figura 15.: Modello a parametri concentrati del riduttore.
4.4 Calcolo delle forze sulla dentatura
Per modellare la deformabilità della dentatura è stato utilizzato il modello di molla unidirezionale (la molla può solo agire a compressione), quindi per la legge di Hooke si ha che:
Figura 16:Spostamenti della molla
1 20
x
x
x
x
k
F
Se Δx ha lo stesso verso del versore Se Δx ha verso opposto al versore
27 Dove k è la rigidezza dell’ingranamento e x è la variazione di spostamento dei capi della molla più precisamente.
Conoscendo gli spostamenti dei vari elementi è possibile conoscere le forze che siano applicate ad essi.
Poiché i perni dei satelliti sono calettati sul portasatelliti, tramite la conoscenza della posizione di quest’ultimo è possibile conoscere la posizione di tutti i satelliti.
Definiamo la matrice M di rotazione che proietta le coordinate dal sistema di riferimento ‘i’ al sistema di riferimento ‘g’:
i i i i M cos sin sin cos .
È possibile calcolare le posizioni dei centri dei satelliti se sono noti la posizione del portasatelliti e la sua rotazione:
c c c c i T p i p i r y x M y x ) ( ) ( ) ( ) ( ) ( 0 Si proietta no poi la posizione del solare e di ciascun satellite lungo la retta inclinata di i- (nota la matrice di rotazione del satellite ha solo l’angolo di pressione perché il sistema di riferimento nasce già ruotato di i).
p p i p i p i T s s s s i T s i s i r y x M r y x M y x ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 0 0 Dove ) ( ) ( s i s i y xsono gli spostamenti del centro del solare rispetto al pianeta i proiettati
28 Estraendo la variazione di spostamento lungo y si può calcolare la forza di contatto che il pianeta esercita sul solare. Conoscendo la rigidezza di ingranamento è possibile esplicitare la forza che l’i-esimo satellite esercita sul solare:
α- x
α- - y α ) y ) y - ( k F i c i s i s i c c s p i d s i sin sin sin cos cos ( cos ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( Proiettando invece lo spostamento del satellite e della corona lungo la retta inclinata di i+si ottiene lo spostamento:
p p i p i p i T r r r r i T r i r i r y x M r y x M y x ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 0 0 Dove ) ( ) ( r i r i y xsono gli spostamenti del centro della corona rispetto al pianeta i
proiettati sulla retta d’azione del fianco attivo.
Estraendo la variazione di spostamento lungo y, si può calcolare la forza di contatto tra corona e ciascun satellite. Conoscendo la rigidezza di ingranamento è possibile esplicitare la forza che l’i-esimo satellite esercita sulla corona:
) y ) y α ( - α - x α y - ( k F i c i c c i r i r p i r d r i
sin sin cos cos sin cos ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 29
Figura 17: Versi delle forze di contatto.
4.5 Calcolo degli spostamenti sulla linea dei contatti del fianco ozioso
Per la verifica della presenza del doppio contatto è necessario proiettare gli spostamenti sulla linea dei contatti del fianco ozioso rappresentata in figura 11.
Quindi, per quanto riguarda l’incuneamento tra solare e satellite, è possibile scrivere che:
p p i p i p i T s s s s i T s i s i r y x M r y x M y x ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 0 0 ' ' Dove ) ( ) ( ' ' s i s i y xsono gli spostamenti del centro del solare rispetto al pianeta i proiettati
sulla retta d’azione del fianco ozioso.
Estraendo lo spostamento lungo y si può calcolare lo spostamento in direzione sulla linea dei contatti del fianco ozioso che è pari a:
i c i s i s i c c s p i s i y ) y α x α - y αy'()( ) ( ) cos(( ) () cos () cos ( ) sin ( )sin sin
30 Lo stesso procedimento è utilizzato per determinare lo spostamento in direzione back tra corona e satellite.
p p i p i p i T r r r r i T r r r y x M r y x M y x ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 0 0 Dove ) ( ) ( r i r i y xsono gli spostamenti del centro della corona rispetto al pianeta i
proiettati sulla retta d’azione del fianco ozioso che è pari a
i r i r i r i c c r p i r i y ) y α x α y αy'()( ) ( ) cos(( ) () cos () cos ( ) sin ()sin sin
Indicando con ‘b(c)’ il gioco circonferenziale, il gioco ’b(p)’ nella direzione di contatto è approssimativamente valutabile come:
) sin( 2 ) ( ) (p c
b b(vedi appendice A per la formula esatta) Per la verifica dell’avvenuto contatto sul fianco ozioso si confronta lo spostamento proiettato lungo la linea dei contatti con
’b(p)
. Se lo spostamento è maggiore del gioco si considera avvenuto il contatto sul fianco ozioso.
4.6 Condizioni di equilibrio e carichi
Le condizioni di equilibrio portano a ottenere 12 equazioni scalari. Le equazioni sono le due cardinali per il solare e per la corona.
È stata scritta la seconda cardinale per il portasatelliti e i 5 satelliti.
Le incognite sono 5( ) ) ( 4 ) ( 3 ) ( 2 ) ( 1 ) ( ) ( ) ( ) ( ) ( ) ( ) (
,
,
,
,
,
,
,
,
,
,
,
s s r r r c p p p p p sy
x
y
x
.31
p s i r i n i c s i r i n i r b r r i r b n i i r i r b n i i r i n i s t s s i c s t n i i s i s t n i i s i n i F F M r F F r -F y k α) ( -F x k α) ( F r -F ) y (y k ) ( -F x k ) ( F p p p p p p p ,..., 1 0 cos 0 0 cos 0 sin 0 0 cos 0 sin ) ( ) ( 1 ) ( ) ( 1 ) ( ) ( ) ( ) ( 1 ) ( ) ( 1 ) ( 1 ) ( ) ( ) ( ) ( ) ( 1 ) ( ) ( 1 ) (
Le condizioni di ingresso sono quindi il carico applicato come coppia di ingresso sul portasatelliti e lo spostamento imposto sulla posizione dei perni dei satelliti (parallel offset P.O.).
4.7 Solutore utilizzato e la verifica delle condizioni
Il metodo di risoluzione utilizzato permette di identificare le condizioni di perdita di contatto o di incuneamento (doppio contatto).
32
Figura 18: Diagramma di flusso del software.
X0 è la soluzione di partenza nota, che è stata valutata considerando il funzionamento
con offset nullo e coppia crescente (necessaria per determinare il termine noto T').
Tramite la conoscenza del carico che viene variato incrementando il disassamento, è possibile determinare il termine noto (T'') del sistema lineare. Quindi è possibile calcolare la nuova soluzione sommando alla vecchia soluzione l’incremento di soluzione dovuto all'incremento di disassamento (P.O.).
33 Note le posizioni e le orientazioni angolari è possibile determinare le forze di contatto (Fn) ed è possibile verificare se in tale configurazione è presente il doppio
contatto (Wedg).
In caso di individuazione di perdita di contatto, la matrice di rigidezza del riduttore viene modificata eliminando l’influenza dei satelliti che non sono in contatto con corona e solare (da notare che la perdita di contatto avviene su entrambe le parti del satellite).
Se viene identificato un doppio contatto, poiché il riduttore si trova in una condizione di funzionamento inaccettabile (per i motivi definiti in 2.3), il programma interrompe i calcoli.
Durante i vari cicli è eseguito un costante controllo per verificare che i satelliti che perdono il contatto non rientrino in funzione, in caso affermativo si modifica la matrice di rigidezza.
4.8 Stima dei parametri da inserire nel modello
Per il calcolo dei parametri di rigidezza degli alberi sono stati sviluppati dei modelli agli elementi finiti dell’albero del solare e dell’albero della corona utilizzando il codice ANSYS.
I modelli costruiti utilizzano una maglia mappata per rendere più veloce la fase di soluzione.
Le analisi eseguite sono necessarie per determinare la rigidezza a taglio e torsionale degli alberi.
34 Per rigidezza a taglio si intende quindi lo spostamento relativo di una faccia rispetto all’altra nella direzione del taglio stesso, in modo analogo allo scorrimento delle carte in un mazzo.
I modelli costruiti riguardano:
Rigidezza a taglio della campana della corona Rigidezza torsionale del campana della corona Rigidezza a taglio dell’albero del solare Rigidezza torsionale dell’albero del solare
La rigidezza è stata ricavata imponendo uno spostamento e una rotazione unitaria, quindi: M F k
I parametri ricavati riguardanti la geometria e le rigidezze sono tipicamente dell'ordine di:
35
Parametro Valore Tipico Unità Simbolo
Rigidezza a taglio della campana 500 kN/mm kb
Rigidezza a torsione della campana 500 MNm/rad mb
Rigidezza taglio dell’albero d’ingresso 1 kN/mm ki
Rigidezza a torsione dell’albero d’ingresso 1 MNm/rad mi
Rigidezza ingranamento 1 104 MN/mm kt
Angolo di pressione 20 °
Raggio di base del solare 70 mm rs
Raggio di base della corona 210 mm rr
Raggio di base dei satelliti 70 mm rp
Raggio del portasatelliti 140 mm rc
Gioco circonferenziale 0.1 mm bp
Tabella 2: Rigidezze degli alberi e geometria.
Per la metodologia utilizzata nel determinare le rigidezze si faccia riferimento all'Appendice B.
36
5 Analisi dei risultati
I risultati ottenuti dal modello a parametri concentrati sono gli spostamenti e i carichi sui denti e l’individuazione dei satelliti che perdono il contatto.
5.1 Deformazioni e spostamenti
È possibile rappresentare gli spostamenti indicati con (Parallel Offset PO) e le rotazioni dei vari componenti durante l'incremento del disassamento.
Il disassamento è stato applicato con verso e direzione come in figura 19, in un intervallo tra 0 e 0.5mm.
Figura 19: Direzione di applicazione del disassamento
In figura 20 è stato indicato:
A tratto nero continuo la configurazione deformata e con linee tratteggiate blu la configurazione iniziale (riduttore scarico e assenza disassamento);
con un pallino la rotazione delle ruote, rosso per i satelliti e viola e per la corona/solare;
con una circonferenza rosso e viola la rotazione di partenza rispettivamente per i satelliti e per la corona/solare (Il disassamento è misurato in m).
37 Per motivi di rappresentazione grafica, gli spostamenti sono stati rappresentati con fattori di scala differenti, (vedi tabella 3 dove sono riportati i massimi valori di spostamento).
Tabella 3: Fattore di amplificazione e valori di spostamento.
Dalla figura 20, si nota che le rotazioni del solare, della corona e del porta satelliti sono costanti poiché dipendono esclusivamente dalla coppia in ingresso al sistema che è costante.
Le rotazioni di assestamento dei satelliti variano al variare del disassamento, poiché questo grado di libertà permette di ripartire i carichi tra i satelliti.
Si osserva inoltre che il solare e la corona hanno degli spostamenti diretti non solo lungo la direzione del disassamento, ma anche perpendicolarmente a tale direzione, ciò è dovuto al comportamento non isotropo del sistema. Causato a sua volta dall’applicazione di un momento.
38
39
5.2 Carichi sui denti
Il software sviluppato nel presente lavoro fornisce in uscita i grafici dei carichi ottenuti su tutti i satelliti. Dalla lettura dei grafici è possibile capire i carichi su ogni satellite, le condizioni per le quali si ha perdita di contatto, le regioni di funzionamento a 5, 4 e 3 satelliti, le regioni con incuneamento.
5.2.1 Modalità di lettura dei grafici
I grafici in funzione del disassamento e della coppia forniscono in ordinata il carico sui denti in funzione di coppia T e del PO.
Ad ogni discontinuità di carico è associata la perdita di contatto su un satellite, tale linea è stata proiettata sul piano disassamento coppia.
Figura 21: Esempio di grafico fornito dal software.
Visualizzando i grafici dall’alto, si notano 5 regioni: quella relativa a funzionamento con 5,4,3 satelliti, quella relativa al funzionamento con meno di 3 satelliti e quella
40 relativa al doppio contatto. In figura 22, è stato indicato con Sat-n il numero di satelliti attivi e con incuneamento la zona con il doppio contatto.
Figura 22: Regioni di funzionamento del satellite.
5.2.2 Grafici ottenuti a bassa coppia
I risultati ottenuti a bassa coppia per alcuni dei 5 satelliti sono i seguenti:
Dove si nota che il satellite numero 5 (la numerazione fa riferimento a figura 15) è il primo a perdere il contatto e ha la zona di funzionamento a 4 e 3 satelliti con carico nullo.
41 Di seguito si nota che il satellite numero 4 è il secondo a perdere il contatto e ha la zona di funzionamento con 3 satelliti con carico nullo.
Il satellite numero 2 invece è quello che tende a caricarsi all’aumentare del disassamento.
42
Figura 24: Carichi sul satellite numero 4.
43 Analizzando i grafici a coppie di ingresso elevate, e con disassamento ortogonale al precedente, il risultato è il seguente,
Figura 26: Effetto coppia elevata sui carichi dei denti.
In questo caso si nota per tutti i satelliti un appiattimento dei piani dovuto ai rapporti rigidezze/coppia in ingresso.
A titolo esemplificativo in figura 27 è rappresentato il fattore di ripartizione del carico, cioè il rapporto tra il carico raggiunto da ogni satellite in condizione di massimo disassamento rispetto alla condizione di funzionamento in cui tutti i satelliti sono ugualmente caricati (20% della coppia massima disassamento di 0,3mm). Come si può osservare, il disassamento introduce una diversa ripartizione del carico sui satelliti rispetto alla condizione di funzionamento ideale. Nel caso presentato questa ripartizione si traduce in un sovraccarico del 9% e 7% nei satelliti due e tre, mentre una riduzione del carico del 1%, 5% e 10% nei satelliti uno quattro e cinque.
44
Figura 27: Fattore di ripartizione del carico tra i satelliti.
6 Software sviluppato
Il software è stato sviluppato in ambiente MATLAB e i listati sono riportati in appendice C.
6.1 Struttura del programma
È costituito da 7 script:
script_EQUAZIONI genera una volata per tutte le matrici simboliche per la determinazioni delle forze di contatto, degli spostamenti nella direzione di doppio contatto della matrice di rigidezza e del termine noto. Tale script viene utilizzato solo per la prima volta non serve per effettuare le analisi. MAIN_FILE è il file principale, avviato il quale sono richiamati nell’ordine
gli script COSTANTI, F_d_Wedg, K_T_T_N ,SOLUT , Figure_3D.
COSTANTI contiene tutte le costanti geometriche e di rigidezza, i carichi e il numero di incrementi di coppia e disassamento.
F_d_wedg contiene una copia numerica delle matrici utilizzate per determinare la forza di contatto e il wedging scritte da script_EQUAZIONI
1 2 3 4 5 0 20 40 60 80 100 120 Satellite F a tt o re d i ri p a rt izi o n e d e l ca ri co
45 K_T_T_N contiene una copia delle matrici di rigidezza e del termine noto
scritte da script_EQUAZIONI
SOLUT è una function che assegna i corretti valori numerici alle matrici per ciascuna condizione di carico che viene simulata.
Figure_3D genera i grafici 3D
6.2 Manuale d’uso
1. Per la generazione delle equazioni utilizzare script_EQUAZIONI.
2. Dallo schermo di risultato dello script_EQUAZIONI copiare le matrici K_T, T_N, F_d e Wedg rispettivamente in K_T_T_N e F_d_Wedg
3. Inserire dentro COSTANTI la geometria dell’ingranaggio e le varie rigidezze e i parametri di risoluzione
46
7 Conclusioni
È possibile affermare che il modello a parametri concentrati sviluppato, pur nella sua semplicità, permette di studiare l’influenza dei fattori più importanti sul comportamento del riduttore e di prevedere vari regimi di funzionamento, distinguendo potenziali scenari di guasto.
In particolare, è possibile stimare come il fattore di carico si ripartisce sui vari satelliti, e si è evidenziato in quali condizioni si verifica la perdita di contatto, oppure il doppio contatto.
In questo modo, è possibile determinare il massimo disassamento ammissibile.
Il software sviluppato nel seguente lavoro permette di conseguenza di stimare i carichi sugli alberi e di poter dimensionare i cuscinetti del banco prova.
Il presente modello può essere migliorato per tener conto di altri fattori, ad esempio è possibile inserire la deformabilità di ulteriori componenti.
Inoltre è sensato introdurre nel modello gli effetti dovuti al moto delle ruote (analisi di tipo dinamico), per verificare il comportamento del riduttore.
47
8 Bibliografia
[1] L. Martorano, A. Antonelli, Appunti delle lezioni di macchine termiche, 2010.
[2] A. Cavallacci, Tesi di Laurea Magistrale in Ingegneria Meccanica Progettazione di un banco a ricircolo meccanico di potenza, 2012.
[3] E. Funaioli, A. Maggiore, U. Meneghetti, Lezioni di meccanica applicata alle macchine, Bologna: Patron Editore, 2005.
[4] Gitin M. Maitra, Handbook of Gear Design, McGraw-Hill, 1994.
[5] B. Boguski, A. Kahraman, T. Nishino, A new method to measure planet load sharing and sun gear radial orbit of planetary gear sets, Journal of Mechanical Design, 2012.
[6] R. August, R. Kasuba, J. L. Frater, and A. Pintz, Dynamics of Planetary Gear Trains, NASA Contractor Report 3793, 1984.
[7] R. G. Parker, Yi Guo, Dynamic analysis of planetary gears with bearing clearance, Journal of computational and nonlinear dynamics, 2012.
[8] R. G. Parker, Yi Guo, Dynamic modeling and analysis of a spur planetary gear involving tooth wedging and bearing clearance nonlinearity, European Journal of Mechanics A/Solids, 2010.
48
Appendice A Relazioni fra il gioco, l’interasse tra le ruote
e gli spessori dei denti
Riferendosi alla figura 28, si ha
Figura 28: Determinazione del gioco.
Definiamo l’iterasse di partenza
Dove sono i raggi delle primitive Definendo il nuovo interasse:
Dove sono i nuovi raggi di lavoro Il nuovo angolo di pressione è :
49 poichè dove si ottiene che come dimostrato in [4].
50
Appendice B Metodologia per la determinazione dei
parametri di rigidezza
Il modello dell’albero della corona è stato costruito in ANSYS utilizzando elementi strutturali a 8 nodi e nessuna simmetria per poter riutilizzare il solito modello per altre analisi.
Figura 29: Maglia dell’albero della corona.
Le condizioni al contorno utilizzate sono un incastro alla flangia che lo collega all’altro albero. Il vincolo di deformazione a taglio è stato realizzato tramite vincolamento lungo l’asse dell’albero. La deformazione imposta dell’albero è stata imposta tramite equazioni di vincolo che riproducono le condizioni di carico.
51
Figura 30: Schematizzazione condizioni al contorno.
Figura 31: Condizioni al contorno dell’albero della corona.
52 Figura 32: Deformata dell’albero della corona.
Con la seguente analisi di convergenza.
53
Appendice C Script MATLAB
In questa appendice sono riportati i sette script del software sviluppato in ambiente MATLAB.