Politecnico di Milano
Scuola di Ingegneria Industriale e dell’Informazione
Laurea Magistrale in Ingegneria Energetica
Analisi dei consumi e delle emissioni di
CO2 di veicoli utilizzando il software
VECTO
Relatore: Professor Angelo OnoratiCo-Relatore: Professor Tarcisio Cerri
Tesi di Laurea Magistrale di: Giuseppe Ghilotti Matricola: 898178
iii
Sommario
Il lavoro svolto in questa tesi vuole studiare il funzionamento e le potenzialità del software europeo VECTO (Vehicle Energy Consumption Calculation Tool) attraverso la simulazione dei consumi e delle emissioni di CO2 di differenti veicoli in varie configurazioni di carico.
La prima parte dell’elaborato si concentra su un’introduzione al software VECTO e alla sua contestualizzazione nel quadro normativo europeo. Successivamente viene descritta l’architettura del software e la logica di funzionamento. Una parte importante è dedicata all’analisi dei vari componenti che vanno a formare il modello del veicolo, sia dal punto di vista di come l’utente si deve interfacciare con essi, sia dal punto di vista tecnico delle formule delle logiche che ne guidano il funzionamento durante le simulazioni.
Nel terzo capitolo sono stati introdotti i modelli di veicolo simulati attraverso VECTO. I modelli presi in considerazione sono: due modelli di Iveco Daily alimentati uno a diesel e l’altro a metano; un modello generico di veicolo pesante; un modello di bus interurbano. I diversi modelli di veicolo definiti sono stati simulati su tre tipi di cicli guida. I primi due cicli utilizzati sono i profili urbani e regionali del ciclo WHTC. Questi cicli sono utilizzati per il processo di certificazione dei veicoli pesanti, quindi è stato utilizzato nella simulazione anche il ciclo WLTP, adatto ai veicoli leggeri come l’Iveco considerato. I risultati delle simulazioni sono stati valutati, grazie all’ausilio di Matlab, dal punto di vista grafico, sottoforma di punti di funzionamento sulle mappe dei consumi dei rispettivi motori. Per quanto riguarda i valori di emissioni di CO2 la simulazione non fornisce valori specifici ad ogni intervallo di simulazione, ma solo dei valori medi su tutto il ciclo.
Nell’ultimo paragrafo del quarto capitolo sono stati analizzati i risultati ottenuti dalle simulazioni, dal punto di vista dei consumi di carburante, del costo specifico di percorrenza e delle emissioni di CO2.
iv
Abstract
The aim of this thesis is to study the potentiality and how works the European software VECTO (Vehicle Energy Consumption Calculation Tool), using the simulation of energy consumption and CO2 emission of different kind of vehicle in different type of configurations.
The first part of the work is an introduction at the software VECTO and a contextualization of him in the European regulatory framework. Subsequently is described the software’s architecture and the working logic. An important part is dedicated to the analysis if each component of the vehicle model, both from the point of view of the user that have to work with it, and from a technical point of view of the equation and logics that control the model during simulations.
In the third chapter are introduced the vehicle models simulated with VECTO. The considered models are: two Iveco Daily fuelled one with diesel and the other with compressed natural gas; one model of a generic heavy-duty vehicle; one model of an interurban bus. The different vehicle models considered has been simulated over three different driving cycles. The first two cycles are the urban and regional mission profiles from the WHTC. Those two cycles are used for the certification process of heavy-duty vehicles, that is why it has been used in the simulation even the WLTP cycle, used for light duty vehicles as the Iveco we are considering.
The simulations results have been evaluated, using Matlab, from a graphical point of view, as working conditions points plotted over the fuel consumption maps of the corresponding engine. Concerning the CO2 emission values, the simulation doesn’t return values at every time step, but it gives only a value averaged over the entire cycle.
In the last paragraph of the fourth chapter have been analysed the results gained from the simulations, from the point of view of energy consumption, specific cost of travelling and CO2 emissions.
v
Indice
Sommario ... iii
Abstract ... iv
Indice ... v
Lista delle figure ... viii
Lista delle tabelle ... x
Capitolo 1 Introduzione ... 1 Capitolo 2 VECTO ... 3 2.1. Inquadramento normativo ... 3 2.2. Architettura di VECTO ... 3 2.3. Interfaccia utente... 6 2.4. Modalità di calcolo ... 9 2.4.1. Engineering mode ... 9 2.4.2. Declaration mode ... 11
2.4.3. Verification test mode ... 11
2.4.4. Engine-only mode ... 11 2.5. Modelli di simulazione ... 12 2.5.1. Gruppo propulsore ... 12 2.5.2. Driver ... 13 Decelerazione predittiva... 13 Overspeed ... 14 2.5.3. Veicolo ... 15
Correzione per il vento trasversale ... 15
Sistemi di assistenza alla guida avanzata ... 16
Coefficiente di resistenza al rotolamento... 17
2.5.4. Motore... 17
Calcolo del consumo di combustibile ... 17
Fattori correttivi ... 18
Limitazioni alla coppia e ai giri motore ... 19
Proprietà dei combustibili ... 19
vi
Perdite di coppia ... 19
Trasmissione automatica ... 20
Modello per il cambio di marcia ... 20
Regole di cambiata per trasmissione manuale ... 23
Modellazione del convertitore di coppia ... 25
2.5.6. Ausiliari ... 26
2.5.7. Presa di forza ... 26
2.6. Limitazioni di VECTO ... 27
Capitolo 3 Creazione dei modelli di veicolo ... 28
3.1. Iveco Daily diesel ... 28
3.1.1. Veicolo ... 28
3.1.2. Motore... 30
3.1.3. Trasmissione ... 32
3.2. Iveco Daily a gas naturale ... 32
3.2.1. Veicolo ... 32
3.2.2. Motore... 32
3.2.3. Trasmissione ... 34
3.3. Veicolo pesante del gruppo 9 ... 35
3.3.1. Veicolo ... 35 3.3.2. Motore... 35 3.3.3. Trasmissione ... 37 3.4. Bus interurbano ... 37 3.4.1. Veicolo ... 37 3.4.2. Motore... 38 3.4.3. Trasmissione ... 39
Capitolo 4 Simulazione dei veicoli su cicli di guida ... 40
4.1. Cicli di guida ... 40
4.2. Risultati delle simulazioni ... 42
4.2.1. Iveco Daily diesel ... 43
4.2.2. Iveco Daily gas naturale ... 45
4.2.3. Veicolo pesante del gruppo 9 ... 47
4.2.4. Bus interurbano ... 48
vii
Capitolo 5 Conclusioni ... 52
Lista degli acronimi ... 54
Bibliografia ... 55
viii
Lista delle figure
Figura 1: prova a banco del motore. ... 1
Figura 2: prova su banco dinamometrico. ... 1
Figura 3 test su strada. ... 2
Figura 4: logo VECTO ... 2
Figura 5: architettura di VECTO. ... 5
Figura 6: finestra principale. ... 6
Figura 7: Job File ... 7
Figura8: finestra Vehicle 8
Figura 9: finestra Engine ... 8
Figura 10: finestra Gearbox ... 9
Figura 11: esempio posizionamento retarder... 12
Figura 12: schema decelerazione predittiva ... 13
Figura 13: overspeed. ... 14
Figura 14: foglio Excel per il calcolo di Cd*A(v_veicolo) ... 15
Figura 15: esempio andamento fattore di scala F-Cd ... 16
Figura 16: triangolazione di Delaunay. ... 18
Figura 17: curve di cambio marcia. ... 21
Figura 18: esempio del salto di marcia ... 22
Figura 19: cambio marcia anticipato. ... 22
Figura 20: punti caratteristici poligoni di cambiata. ... 23
Figura 21: limite superiore alla curva di scalo marcia ... 24
Figura 22: distanza minima fra i poligoni di cambiata. ... 25
Figura 23: schema presa di forza. ... 26
Figura 24: esempio ciclo di guida con fase di fermata e presa di forza. ... 27
Figura 25: scheda tecnica Iveco Daily. ... 29
Figura 26: dati generali motore Daily 3l diesel. ... 30
Figura 27: curva di carico massimo e minimo Daily 3l diesel. ... 31
Figura 28: mappa consumi (g/h) Daily 3l diesel. ... 31
Figura 29: curve di carico massimo e minimo Daily 3l CNG ... 33
Figura 30: mappa dei consumi (g/h) Daily 3l CNG ... 34
Figura 31: veicolo pesante gruppo 9. ... 35
Figura 32: curve di coppia veicolo pesante gruppo 9. ... 36
Figura 33: mappa consumi (g/h) veicolo classe 9. ... 37
Figura 34: curva di coppia bus interurbano. ... 38
Figura 35: mappa consumi (g/h) bus interurbano. ... 39
Figura 36: WHTC, profilo regionale, in funzione della distanza. ... 41
Figura 37: WHTC, profilo urbano, in funzione della distanza. ... 41
Figura 38: WLTP in funzione del tempo. ... 42
ix
Figura 40: WHTC regionale, Iveco Daily diesel. Consumi g/h. ... 44
Figura 41: WLTP, Iveco Daily diesel. Consumi g/h. ... 45
Figura 42: WHTC urbano, Iveco Daily gas naturale. Consumi g/h. ... 45
Figura 43: WHTC regionale, Iveco Daily gas naturale. Consumi g/h. ... 46
Figura 44: WLTP, Iveco Daily gas naturale. Consumi g/h. ... 46
Figura 45:WHTC urbano, veicolo pesante classe 9. Consumi g/h. ... 47
Figura 46: WHTC regionale, veicolo pesante classe 9. Consumi g/h. ... 47
Figura 47: WHTC regionale, bus interurbano. Consumi g/h. ... 48
x
Lista delle tabelle
Tabella 1: ciclo di guida in funzione della velocità ... 10
Tabella 2: ciclo di guida con velocità effettiva misurata. ... 10
Tabella 3: ciclo di guida con potenza alle ruote. ... 11
Tabella 4: ciclo di guida in modalità Engine-only ... 12
Tabella 5: punti che definiscono i poligoni di cambiata ... 24
Tabella 6: punti che definiscono la curva di distanza minima tra i poligoni ... 25
Tabella 7: rapporti al cambio Daily 3l diesel. ... 32
Tabella 8: rapporti al ponte e marcie Daily 3l CNG... 34
Capitolo 1
Introduzione
I veicoli pesanti sono responsabili di circa un quarto delle emissioni di CO2 da trasporto stradale e di circa il 6% delle emissioni totali nell’Unione Europea. Come misura mitigante ai cambiamenti climatici, la commissione europea ha impostato l’obbiettivo di ridurre, entro il 2050, del 60% le emissioni stradali rispetto ai livelli di riferimento del 1990. Per questo motivo sono state attuate delle misure volte alla riduzione delle emissioni di CO2 dei veicoli stradali. A differenza dei veicoli leggeri, quantificare le emissioni e i consumi di carburante dei veicoli pesanti presenta una forte variabilità in funzione dell’uso specifico del veicolo. Esistono infatti innumerevoli differenze nelle configurazioni, quali il carico, il consumo degli ausiliari, le mappe di perdita dei vari componenti e un numero sempre crescente di tecnologie volte alla riduzione di CO2 e dei consumi.
Esistono diverse opzioni possibili per procedere alla certificazione delle emissioni di CO2. La prima è la prova su banco del motore, Figura 1. Questa presenta i punti favorevoli di essere una modalità di test già definita e di ottenere valori di emissioni molto precise, ma ha lo svantaggio di non tener conto in alcun modo dell’efficienza del veicolo in generale.
Figura 1: prova a banco del motore.
La seconda modalità è la prova su banco dinamometrico, Figura 2. La prova garantisce di ottenere valori dei consumi dell’intero veicolo, ma con il bisogno di test separati per misurare la resistenza aerodinamica. Come contro presenta un aumento dei costi rispetto al caso precedente e ha anche il problema che i veicoli potrebbero essere stati ottimizzati in funzione della prova su banco dinamometrica.
2 Il terzo metodo è quello del test su strada, Figura 3. Questo metodo garantisce la più accurata valutazione di consumi ed emissioni del veicolo, misurando le effettive condizioni del veicolo durante un ciclo di guida reale. Oltre al costo, questo metodo presenta lo svantaggio di essere difficilmente riproducibile per le varie configurazioni dei veicoli pesanti.
Figura 3 test su strada.
L’ultimo metodo è la simulazione tramite il software VECTO (Vehicle Energy Consumption Calculation Tool), Figura 4. Questa simulazione permette una stima dei consumi e delle emissioni del veicolo per intero, mantenendo un costo ridotto, dato che i dati misurati per i vari componenti del veicolo (mappe di rendimento, ecc.) possono essere applicati a tutti i veicoli con gli stessi componenti. VECTO garantisce inoltre un’elevata riproducibilità e flessibilità, permettendo di valutare qualsiasi tipo di configurazione. Uno dei possibili limiti di questo metodo è la necessità di un regolare aggiornamento dello strumento di simulazione, in modo tale da poter coprire le nuove tecnologie che raggiungono il mercato.
3
Capitolo 2
VECTO
2.1.
Inquadramento normativo
L’utilizzo del software VECTO viene introdotto dalla commissione europea con il regolamento (UE) 2017/2400 del 12 dicembre 2017 nell’ambito del quadro giuridico riguardante le omologazioni dei veicoli a motore. Questo regolamento stabilisce le norme per l’utilizzo del software, al fine di determinare le emissioni di CO2 e il consumo di carburante dei veicoli da immatricolare.
Il regolamento si applica ai veicoli progettati per il trasporto merci con massa a pieno carico superiore a 7500 kg (categorie N2 ed N3 definite nell’allegato II della direttiva 2007/46/CE). Il costruttore del veicolo deve ottenere la licenza per poter utilizzare lo strumento di simulazione al fine di determinare i consumi e le emissioni per l’immatricolazione. Il costruttore registra i risultati della simulazione eseguita in conformità con la normativa, cosicché ciascun veicolo da immatricolare sia accompagnato da un file di informazioni per il cliente. Il costruttore crea anche un hash crittografico del file usando lo strumento di hashing del software. Questi strumenti sono usati per stabilire un’associazione univoca tra le proprietà correlate alle emissioni di CO2 e al consumo di carburante certificate di un componente, un'entità tecnica indipendente o un sistema e il relativo documento di certificazione, così come per stabilire un'associazione univoca tra un veicolo e il file dei registri del costruttore, così facendo si garantisce che ogni veicolo sia accompagnato anche da un certificato di conformità contenente l’impronta generata.
2.2.
Architettura di VECTO
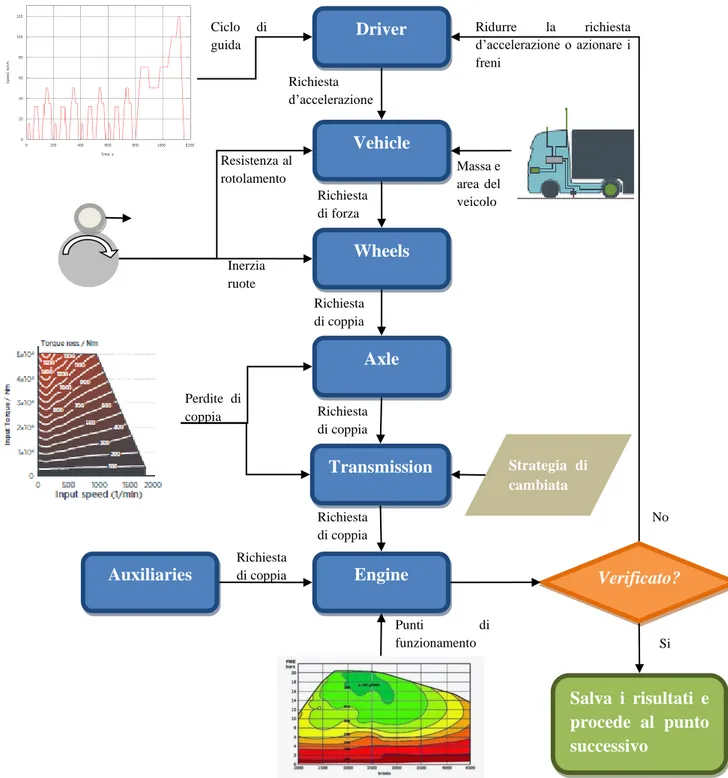
Per poter calcolare i consumi di un veicolo è necessario convertire le informazioni contenute nel ciclo di guida in punti operativi nella mappa del motore (coppia-giri motore) sotto i vincoli del carico considerato e die vari componenti del veicolo. Questo è ottenuto grazie a VECTO attraverso un approccio di simulazione ‘’all’indietro’’. Nella struttura di VECTO il flusso della simulazione prende, appunto, la direzione opposta rispetto a quella che si ha effettivamente nel veicolo. Nella realtà l’autista, attraverso il pedale dell’acceleratore, da un comando al motore per fornire al veicolo sufficiente potenza per portare il veicolo alla velocità desiderata. Il flusso d’energia parte dalla conversione dell’energia del carburante in lavoro grazie al motore. Da lì continua attraverso la frizione, il cambio, l’albero, per essere in fine convertita in lavoro di trazione nelle ruote.
Nell’architettura all’indietro di VECTO, il modulo Driver converte le informazioni del ciclo di guida (cioè la velocità obbiettivo del veicolo data una pendenza) in una richiesta di
4 accelerazione. Questa informazione viene passata al modulo Vehicle, che, considerando la massa totale del veicolo, il coefficiente d’attrito aerodinamico e la resistenza al rotolamento, converte la richiesta d’accelerazione in una richiesta di forza. Il modulo Wheel converte la richiesta di forza in una richiesta di coppia e aggiunge la coppia relativa all’inerzia delle ruote. La richiesta di coppia passa anche attraverso ai moduli Brakes e Axle. Quest’ultimo considera le perdite di torsione e manda la richiesta di coppia al modulo Transmission.
Il modulo Transmission contiene due sotto modelli, uno contenente la mappa di perdita per torsione per tutti i rapporti del cambio, l’altro contiene la strategia di cambiata. In base alla marcia selezionata, il modulo valuta le rispettive perdite di coppia e definisce la velocità operativa del motore. A questo punto il modulo Engine riceve la richiesta di coppia dalla trasmissione e dal modulo Auxiliaries e definisce il punto operativo sulla mappa coppia-giri motore.
Se il punto operativo così trovato rispetta i vincoli della curva a pieno carico e di quella di motoring del motore, il modulo Engine restituisce un messaggio positivo e la simulazione avanza al successivo intervallo temporale. Se non rispetta i vincoli, il modulo Engine restituisce un messaggio d’errore al modulo Driver, il quale riduce l’accelerazione richiesta se questa era al di sopra della curva a carico massimo. Questo processo è ripetuto fino a che il modulo Engine non restituisce un messaggio positivo. In Figura 5 è mostrato un modello del flusso della simulazione.
Una volta trovato un valido punto di funzionamento per il motore, il consumo di combustibile letto dalla mappa stazionaria viene corretto considerando fattori come i transitori, le operazioni a freddo, i sistemi di post trattamento e fattore di riscaldamento del combustibile. Il fattore di correzione per i transitori è determinato comparando il consumo del motore durante il ciclo WHTC (World Harmonized Transient Cycle), come simulato dai test sul motore, con i valori di consumi sullo stesso ciclo ottenuti dall’interpolazione dei punti sulla mappa stazionaria. La correzione per la partenza a freddo tiene conto dei consumi sul WHTC in condizioni a freddo.
5 La correzione riguardante il post trattamento considera il periodico aumento dei consumi durante le operazioni di pulizia dei filtri anti particolato nei diesel. In fine, il fattore di correzione del riscaldamento del carburante considera le possibili differenze fra il contenuto energetico del carburante usato durante la mappatura del motore rispetto al carburante usato standard usato nei calcoli da VECTO. Le emissioni di CO2 sono calcolate dai valori corretti di consumo di carburante e dal valore di carbonio contenuto nel combustibile standard usato da VECTO.
Figura 5: architettura di VECTO.
Massa e area del veicolo Si Resistenza al rotolamento Inerzia ruote No Punti di funzionamento Richiesta di coppia Richiesta di coppia Perdite di coppia Richiesta di coppia Richiesta di coppia Richiesta di forza Richiesta d’accelerazione Ridurre la richiesta d’accelerazione o azionare i freni Ciclo di guida Driver Vehicle Wheels Axle Transmission Engine Auxiliaries Verificato? Salva i risultati e procede al punto successivo Strategia di cambiata
6
2.3.
Interfaccia utente
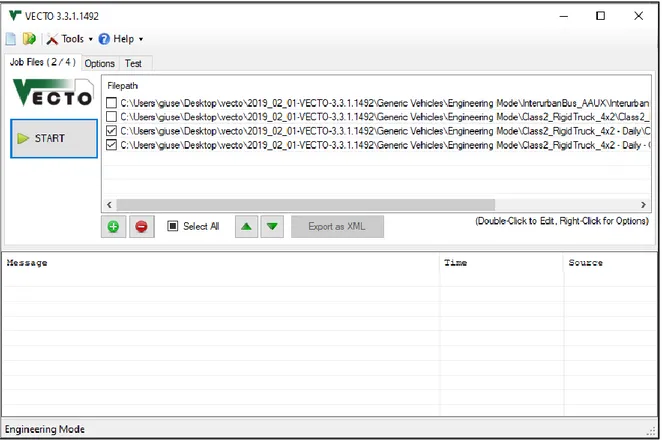
Avviando VECTO si apre la Finestra principale Figura 6. Da questa è possibile controllare tutti i settaggi principali ed aprire le finestre di dialogo successive. Per iniziare una simulazione è necessario scegliere una delle modalità di calcolo (si veda paragrafo 2.5) e va aggiunto almeno un file di lavoro (.vecto) nella Job List. Cliccando START verranno calcolati tutti i file selezionati dalla Job List.
Figura 6: finestra principale.
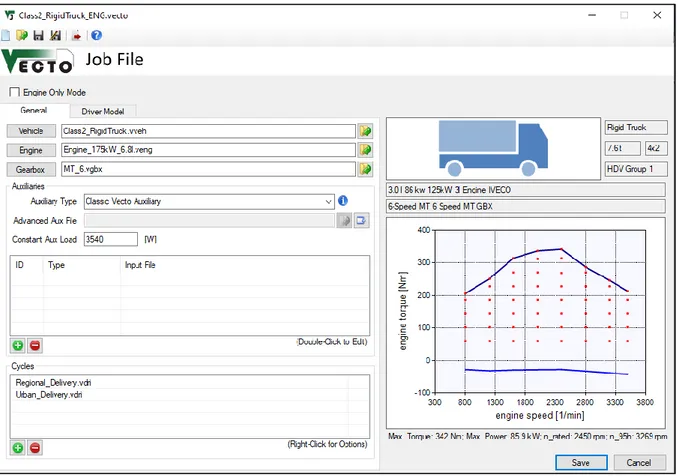
Selezionando uno dei lavori presenti, si aprirà la finestra Job File, Figura 7, relativa al progetto selezionato. Da questa finestra è possibile impostare i parametri relativi agli ausiliari, al ciclo di guida e aprire le finestre relative a tutti le caratteristiche del file di lavoro, quali Vehicle, Engine e Gearbox.
7
Figura 7: Job File
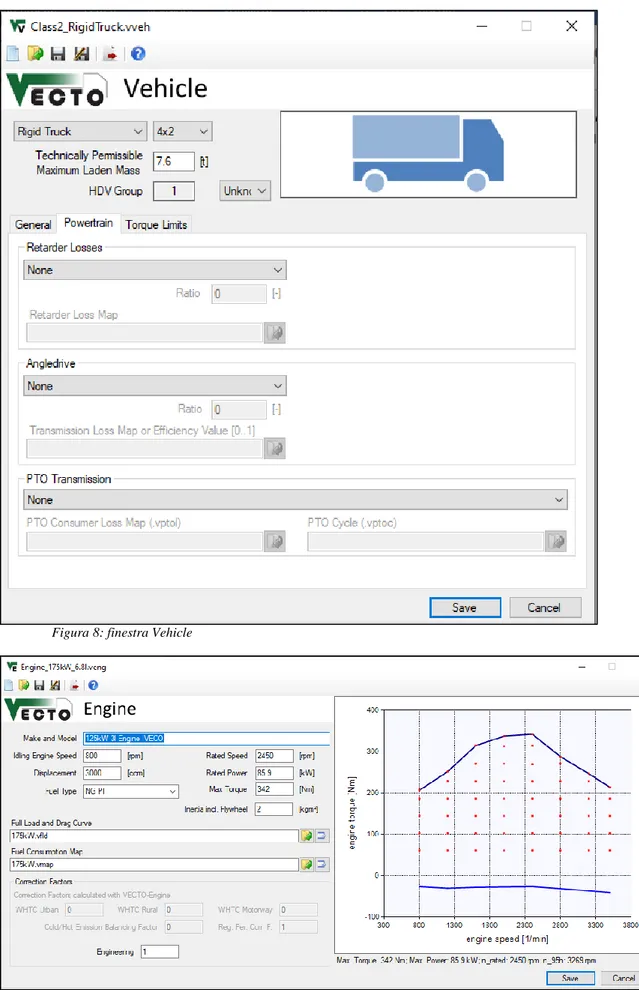
Schiacciando il tasto Vehicle si aprirà la rispettiva finestra, Figura 8, dalla quale è possibile definire i principali parametri del veicolo, quali il numero di assi, le masse, la resistenza al rotolamento e la resistenza aerodinamica. Nelle altre schede è possibile regolare i parametri relativi al retarder, alla presa di forza e, eventualmente, limitare il valore massimo di copia motore per ciascun rapporto.
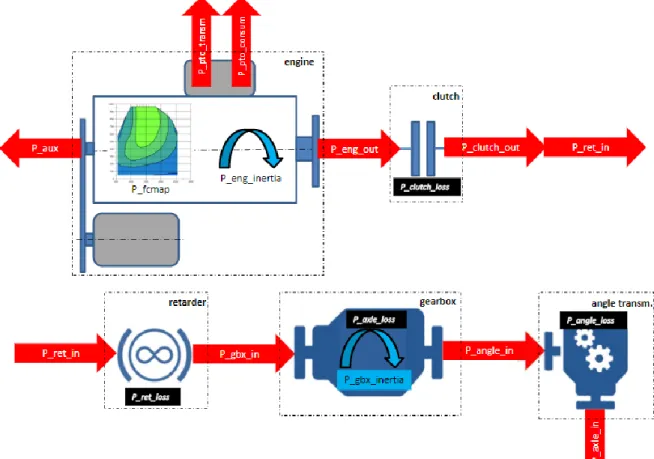
La finestra Engine, Figura 9, definisce tutti i parametri relativi al motore e i file di input quali la mappa dei consumi e la curva a pieno carico.
Dalla finestra Gearbox, Figura 10, è possibile definire i rapporti del cambio, inserire la mappa delle perdite e definire la strategia di cambiata. È in oltre possibile definire il tipo di trasmissione (automatica, manuale), l’inerzia delle ruote dentate e l’interruzione di trazione durante i cambi marcia.
È infine presente una finestra grafica che permette di visualizzare rapidamente i diversi parametri, risultanti dalla simulazione, in funzione del tempo o dello spazio percorso.
8
Figura 8: finestra Vehicle
9
Figura 10: finestra Gearbox
2.4.
Modalità di calcolo
VECTO supporta diverse modalità di calcolo per dichiarare un veicolo, validare i risultati del test, o sperimentare con diversi parametri e componenti.
2.4.1.
Engineering mode
La modalità Engineering è usata per la sperimentazione e la validazione di un veicolo. L’utente è libero di definire ogni aspetto nella modellazione dei componenti del veicolo e del ciclo di guida. In questa modalità il ciclo di guida definisce il metodo di simulazione, che non può essere imposto esplicitamente, ma dipende appunto dal ciclo inserito.
Una prima opzione prevede l’inserimento di un ciclo con una velocità obbiettivo in funzione dello spazio (esempio di input in Tabella 1). In questa modalità VECTO prova a raggiungere e a mantenere la velocità obbiettivo. Nell’esempio di input sottostante sono riportati i valori di distanza percorsa, velocità obbiettivo, tempo di fermata, pendenza della strada e la potenza addizionale relativa al consumo degli ausiliari.
10
<s> [m]
<v>
[km/h]
<stop> [s] <grad> [%] <Paux> [kW]
0
10
10
2.95
1.5
1
20
0
2.97
1.3
2
35
0
3.03
1.3
3
50
0
2.99
1.3
Tabella 1: ciclo di guida in funzione della velocità
In una seconda opzione il ciclo di guida definisce la velocità effettiva misurata in funzione del tempo. VECTO prova a simulare il modello del veicolo usando questa velocità come la velocità effettiva del veicolo. A causa di differenze nella strategia di cambiata reale rispetto a quella simulata possono verificarsi delle piccole differenze di velocità, ma VECTO cerca di compensarle non appena la marcia è ingranata di nuovo. Il ciclo di guida in input viene definito come da esempio riportato in Tabella 2.
<t> [s] <v> [km/h] <grad> [%] <Paux> [kW]
0
0
2.95
1.5
1
0.6
2.97
1.3
2
1.2
3.03
1.3
3
2.4
2.99
1.3
Tabella 2: ciclo di guida con velocità effettiva misurata.
Nella terza modalità il ciclo di guida definisce la velocità effettiva misurata, come nella seconda opzione, in più definisce il rapporto e i giri del motore, il tutto in funzione del tempo. Con tale input, VECTO trascura la strategia di cambiata che usa abitualmente e fissa direttamente i giri del motore.
L’ultima modalità prevede come input (Tabella 3) la potenza effettiva misurata alle ruote e il rapporto usato, in funzione del tempo. VECTO procede con la simulazione considerando questa richiesta di potenza.
<t> [s] <Pwheel> [kW] <gear> [-] <n> [rpm] <Padd> [kW]
0
0
0
600
1.5
11
<t> [s] <Pwheel> [kW] <gear> [-] <n> [rpm] <Padd> [kW]
2
15.333
3
1200
1.3
3
50.56
3
1400
1.3
Tabella 3: ciclo di guida con potenza alle ruote.
2.4.2.
Declaration mode
Questa modalità è utilizzata per la certificazione ufficiale di un veicolo. Molti parametri della simulazione sono predefiniti, in modo tale di garantire un metodo più generico per comparare le emissioni. A differenza del caso precedente non bisogna inserire il ciclo di guida, questi sono infatti assegnati automaticamente. I calcoli saranno effettuati in base al ciclo di guida, definito dalla classe del veicolo pesante, con tre tipi di carico per ogni ciclo, pieno, vuoto e carico di riferimento.
2.4.3.
Verification test mode
Lo scopo del test di verifica è quello di simulare un veicolo, definito con la Declaration Mode, su un ciclo di guida reale misurato. Questa modalità di simulazione usa il proprio tipo di formato per il ciclo, richiedendo principalmente la velocità del veicolo, la velocità di rotazione delle ruote, la coppia alle ruote, la velocità della ventola del motore e la velocità di rotazione del motore. A questo punto VECTO calcola il rapporto appropriato e simula il ciclo. La potenza degli ausiliari è definita in base alle tecnologie del veicolo e dipendono dalla velocità del veicolo. La potenza della ventola motore è invece calcolata in base alla sua velocità di rotazione. Il consumo di carburante è calcolato usando i giri motore presi dal ciclo di guida a la richiesta di coppia data dal ciclo, con l’aggiunta delle perdite di tutti i componenti del gruppo propulsore.
2.4.4.
Engine-only mode
Quando si utilizza questa modalità VECTO calcola i consumi di carburante in base al ciclo di carico, che deve contenere i valori di coppia o potenza motore e velocità motore. VECTO aggiunge l’inerzia motore alla richiesta di potenza data e simula il motore. In Tabella 4 è riportato un esempio di input per questa modalità, in cui è specificata la potenza al motore.
<t> [s] <n> [rpm] <Pe> [kW] <Padd> [kW]
0
600
0
1.5
1
950
25.3
1.3
12
<t> [s] <n> [rpm] <Pe> [kW] <Padd> [kW]
3
1400
110.1
1.3
Tabella 4: ciclo di guida in modalità Engine-only
2.5.
Modelli di simulazione
In questo paragrafo vengono presentati i metodi in cui vengono modellizzati i vari componenti supportati da VECTO.
2.5.1.
Gruppo propulsore
Il gruppo propulsore viene configurato secondo l’ordine presentato nella Figura 5 del paragrafo 2.1. Tuttavia possono esserci delle variabili in base al tipo di trasmissione e di retarder utilizzati. Il retarder può essere posizionato prima o dopo la scatola del cambio e la trasmissione può essere manuale o automatica. In Figura 11 è rappresentato lo schema di una delle possibili configurazioni, in questo caso cambio manuale con retarder in ingresso alla scatola del cambio.
13
2.5.2.
Driver
Decelerazione predittiva
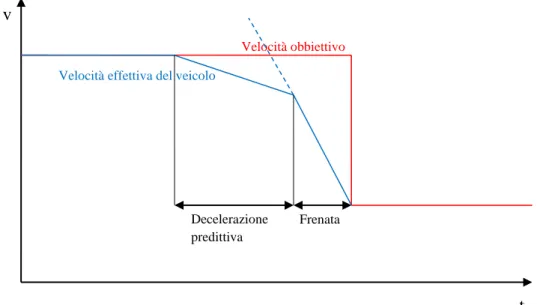
Questa caratteristica permette di simulare il comportamento dell’autista ‘’intelligente’’ che molla l’acceleratore e comincia a perdere velocità prima di iniziare una fase di frenata per raggiungere la velocità obbiettivo successiva. Così facendo la fase di decelerazione incomincia prima rispetto al caso senza la decelerazione predittiva (Figura 12).
Figura 12: schema decelerazione predittiva
La decisione di rilasciare il pedale dell’acceleratore è basata su una stima dell’energia cinetica e potenziale posseduta dal veicolo rispetto a quella che presumibilmente dissiperà a causa della resistenza del veicolo. In previsione di una variazione di velocità si compara il livello energetico prima e dopo il cambio di velocità. La differenza fra i due livelli è usata per stimare la forza decelerante media. La decelerazione predittiva incomincia se la forza resistente media del veicolo durante questa fase, moltiplicata per un ‘Fattore Decisionale’, (1), diventa minore della forza decelerante media (ACEA White Book 2016, Sezione 8).
Il ‘Fattore Decisionale’ dipende dalla velocità obbiettivo e dalla variazione di velocità:
𝐹𝐷
𝑝𝑟𝑒𝑑𝑖𝑡𝑡𝑖𝑣𝑜= 2.5 − 1.5 ∗ 𝐹𝐷
𝑣𝑒𝑙∗ 𝐹𝐷
𝑑𝑒𝑙𝑡𝑎𝑣(1)
Decelerazione predittiva
Frenata
Velocità effettiva del veicolo
Velocità obbiettivo
t v
14 dove
𝐹𝐷
𝑣𝑒𝑙e 𝐹𝐷
𝑑𝑒𝑙𝑡𝑎𝑣 sono valori tra 0 e 1.Overspeed
L’overspeed, Figura 13, si attiva quando si ha una richiesta totale di potenza alle ruote negativa, cioè quando il veicolo accelera su una pendenza negativa. Durante questa posizione la frizione resta chiusa, il motore agisce da freno e il veicolo accelera fino a raggiungere una velocità pari alla somma tra la velocità obbiettivo e la overspeed. A questo punto vengono azionati i freni meccanici per evitare che il veicolo acceleri ulteriormente.
15
2.5.3.
Veicolo
Correzione per il vento trasversale
VECTO presenta diversi metodi per tener conto dell’influenza che il vento trasversale ha sul coefficiente di drag. La forza aerodinamica viene calcolata secondo (2):
𝐹𝑎𝑒𝑟𝑜 = 0.5 ∗ 𝜌𝑎𝑖𝑟∗ (𝐶𝑑,𝑣∗ 𝐴 ∗ (𝑣𝑣𝑒𝑖𝑐𝑜𝑙𝑜)) ∗ 𝑣𝑣𝑒𝑖𝑐𝑜𝑙𝑜2 (2)
La dipendenza dalla velocità del valore 𝐶𝑑,𝑣∗ 𝐴 permette di valutare l’effetto del vento trasversale.
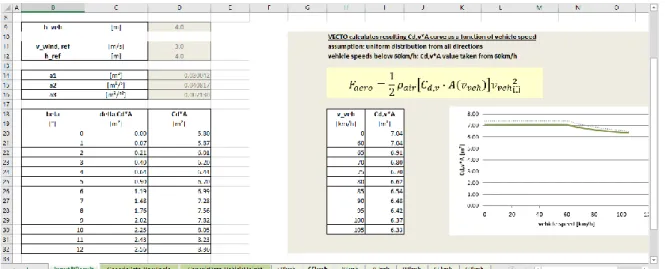
Il primo metodo di correzione è quello usato nella Declaration mode, basato sulle seguenti condizioni al contorno: le condizioni medie del vento sono definite come 3 m/s ad una altezza da terra di 4 m e soffiando in modo uniforme da tutte le direzioni; la dipendenza del fattore 𝐶𝑑,𝑣 ∗ 𝐴 dall’angolo d’imbardata 𝛽 viene descritta da un polinomio di terzo ordine (3) della forma:
𝐶𝑑 ∗ 𝐴(𝛽) − 𝐶𝑑 ∗ 𝐴(0) = 𝑎1 ∗ 𝛽 + 𝑎2 ∗ 𝛽2+ 𝑎3 ∗ 𝛽3 (3)
dove a1 a2 e a3 dipendono dal tipo di veicolo (si rimanda al manuale di VECTO per i valori).
VECTO calcola poi la funzione 𝐶𝑑,𝑣∗ 𝐴 in funzione della velocità del veicolo, integrando
su tutte le possibili direzioni del vento e su tutte le altezze da zero all’altezza del veicolo. Dal manuale utente di VECTO è possibile scaricare un foglio Excel, Figura 14, che mostra la generazione del fattore 𝐶𝑑,𝑣∗ 𝐴 in funzione della velocità.
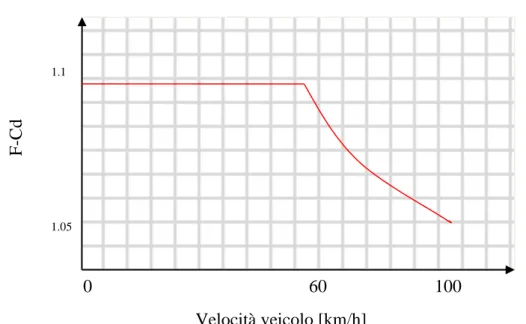
16 Un secondo metodo di correzione prevede che il valore di base 𝐶𝑑∗ 𝐴 sia corretto da una
funzione dipendente dalla velocità definita dall’utente. Il valore di 𝐶𝑑∗ 𝐴 viene corretto in base al fattore di scala (Figura 15) fornito secondo la formula (4):
𝐶𝑑 ∗ 𝐴(𝑣𝑣𝑒𝑖𝑐𝑜𝑙𝑜) = 𝐶𝑑∗ 𝐴 ∗ 𝐹𝐶𝑑(𝑣𝑣𝑒𝑖𝑐𝑜𝑙𝑜) (4)
Figura 15: esempio andamento fattore di scala F-Cd
Un ultimo metodo di correzione prevede l’utilizzo dell’effettiva velocità e direzione del vento, nel caso in cui siano state misurate, che quindi dovranno essere inserite nel file relative al ciclo di guida.
Il fattore 𝐶𝑑∗ 𝐴 inserito nella fase di definizione del veicolo, viene corretto in base alla velocità e all’angolazione del vento fornite, secondo la formula (5):
𝐶𝑑 ∗ 𝐴(𝑣𝑣𝑒𝑖𝑐𝑜𝑙𝑜) = 𝐶𝑑∗ 𝐴 + 𝛥𝐶𝑑(𝛽) (5).
Sistemi di assistenza alla guida avanzata
VECTO, nella sua Declaration mode, considera alcuni sistemi di assistenza alla guida avanzati applicando dei fattori correttivi. Fra le tecnologie considerate ci sono: lo star and stop del motore, l’EcoRoll (i.e. veicolo che percorre una strada in discesa per inerzia) con e senza lo stop del motore e il cruise control predittivo.
Per quanto riguarda il cruise control predittivo vengono considerate tre diverse situazioni. La prima fa in modo che quando il veicolo si trova in prossimità di una discesa, inizia a ridurre la velocità prima della variazione di pendenza, in modo tale da ridurre la fase di frenata successiva. Una seconda situazione è quando il veicolo si trova in discesa con una
60 100 0 F -Cd 1.05 1.1 Velocità veicolo [km/h]
17 bassa velocità ma con una pendenza elevata, in questo caso il veicolo evita di accelerare usando il motore, ma sfrutta l’accelerazione gravitazionale. La terza situazione si ha quando il un veicolo sta percorrendo una discesa ed è in vista della fine di essa. In questo caso viene permesso al veicolo di raggiungere una velocità superiore alla overspeed per un breve periodo alla fine della discesa, in modo tale da accumulare ulteriore energia per la fase di successiva pianura
Coefficiente di resistenza al rotolamento
La resistenza al rotolamento viene calcolata attraverso un parametro indpendente dalla velocità, il Coefficiente di Resistenza al Rotolamento (CRR). Il CRR viene modellato in funzione della massa totale del veicolo utilizzando la seguente formula (6):
𝐶𝑅𝑅 = ∑ 𝑠(𝑖)∗ 𝐶𝑅𝑅𝐼𝑆𝑂(𝑖)∗ ( 𝑠(𝑖)∗𝑚∗𝑔 𝑤(𝑖)∗𝐹𝑧𝐼𝑆𝑂(𝑖)) 𝛽−1 𝑛 𝑖=1 (6)
dove le i si riferiscono al numero di assi, s(i) è il carico su asse, 𝐶𝑅𝑅𝐼𝑆𝑂(𝑖) il coefficiente di resistenza secondo la ISO 28580, w(i) il numero di pneumatici, 𝛽 un parametro costante pari a 0.9 e 𝐹𝑧𝐼𝑆𝑂(𝑖) il carico di test dello pneumatico secondo la ISO 28580.
2.5.4.
Motore
Calcolo del consumo di combustibile
Il consumo base di carburante viene interpolato dalla mappa dei consumi inserita come input. Se necessario questo valore viene corretto per compensare il consumo extra degli ausiliari nel caso sia presente un sistema di start and stop. L’emissione di CO2 per il ciclo considerato viene direttamente ricavato dai consumi di combustibile utilizzando un fattore gravimetrico CO2/consumo_combustibile.
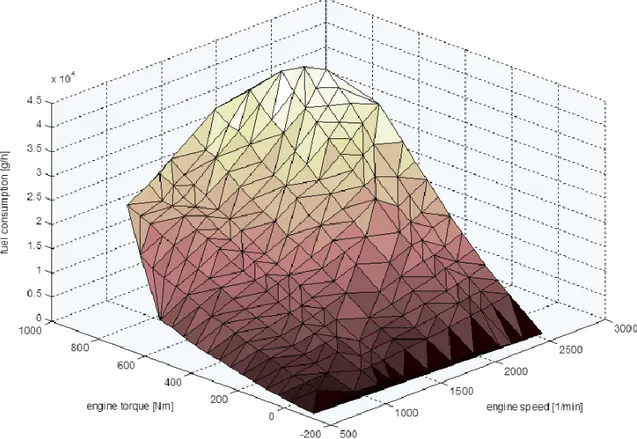
Per quanto riguarda l’interpolazione della mappa dei consumi, questa si basa sulla triangolazione di Delaunay (esempio in Figura 16). Il metodo prevede che tutti i punti della mappa in funzione dei giri, della coppia e dei consumi (x,y,z) vadano a creare una griglia di triangoli, dove tutti i punti della mappa devono essere compresi in almeno un triangolo. A questo punto si considerano i punti operativi (x,y) che devono essere interpolati e si cerca la proiezione del triangolo, sul piano giri-coppia, entro il quale giace il punto. Se non appartiene a nessun triangolo la simulazione fallisce. In fine viene calcolato il valore del
18 consumo di carburante valutando il valore del punto x-y sul piano formato dal triangolo considerato.
Figura 16: triangolazione di Delaunay.
Fattori correttivi
Quando si opera nella Declaration Mode vengono applicate ulteriori correzioni al modulo motore.
Per evitare inconsistenze tra le e missioni e i consumi dei cicli WHTC a caldo e la mappa dei consumi stazionaria viene utilizzato un fattore di correzione.
Considerando il punto di funzionamento obbiettivo dello specifico motore nel ciclo WHTC, il consumo di combustibile viene interpolato dalla mappa dei consumi stazionaria (si veda il sotto paragrafo precedente), considerando separatamente i valori per le tre parti del ciclo (urbano, rurale, autostrada). Dai valori di consumi, ottenuti per ciascuna delle tre parti, si ricavano i fattori di correzione 𝐹𝐶𝑢𝑟𝑏, 𝐹𝐶𝑟𝑢𝑟, 𝐹𝐶𝑎𝑢𝑡 .
Il fattore di correzione totale (7) dipende da dei parametri (weighting factors WF) che sono caratteristici del rispettivo profilo di missione (urbano, regionale o a lungo raggio).
19 Viene poi utilizzato un altro fattore di correzione relativo al problema di bilanciare i risultati relative alle partenze a caldo piuttosto che a freddo.
Limitazioni alla coppia e ai giri motore
Nel modello del veicolo possono essere introdotte delle limitazioni alla coppia o ai giri motore, imposti dai limiti della trasmissione o da limitazioni al veicolo.
Per limitare la coppia motore si agisce sulla curva a pieno carico e la si taglia al valore limite di coppia, per un determinato rapporto al cambio. I giri motore vengono invece limitati, tagliando la curva di upshift (si veda paragrafo 2.5.5) in modo tale di imporre il cambio marcia ad un numero di giri inferiore rispetto a quello classico. Per l’ultimo rapporto, dove non è possibile un cambio marcia verso l’alto, si applica come limite la velocità massima in ingresso alla scatola del cambio.
Proprietà dei combustibili
VECTO utilizza come proprietà relative ai vari combustibili quelle relative ad uno studio del 2018 effettuato da CONCAWE/EUCAR, che descrive i combustibili tipici nel mercato europeo.
2.5.5.
Scatola del cambio
Perdite di coppia
Tutte le perdite di coppia, non solo nel cambio, ma anche negli altri componenti della trasmissione, vengono considerati con la seguente formula (8) che calcola la coppia in uscita di ciascun componente:
𝑇𝑜𝑢𝑡 = (𝑇𝑖𝑛− 𝑇𝑙𝑜𝑠𝑠) ∗ 𝑟𝑔𝑒𝑎𝑟 (8)
20
Trasmissione automatica
Nei dati di input vanno definiti solo i parametri relativi alla trasmissione meccanica, non è necessario definire il convertitore di coppia. Questo viene considerato automaticamente da VECTO che, in base a che sia in serie (convertitore di coppia) o in parallelo (power split) con la trasmissione, applica la correzione.
Nel caso di cambio automatico con convertitore di coppia in serie, questo usa lo stesso rapporto di trasmissione della prima marcia. Nel caso invece di cambio automatico con power split, le perdite meccaniche e il rapporto di conversione sono già implicite, VECTO non considera ulteriori perdite.
Modello per il cambio di marcia
Il modello per il cambio marcia prevede la presenza, nel piano coppia giri motore, di due curve di cambiata che delimitano una zona nel grafico (Figura 17). Quando un punto operativo finisce al di fuori di questa zona, il software procede con il cambio marcia. Per la prima e l’ultima marcia sono ovviamente presenti solo una curva ciascuno, rispettivamente quella del cambio verso l’alto e quella verso il basso.
Mentre per scalare la marcia si ha lo stesso comportamento sia per il cambio automatico che manuale, per aumentare la marcia si hanno due comportamenti diversi. Per un cambio manuale si ha un aumento di marcia quando il punto operativo supera la curva di cambiata. Nel caso di cambio automatico, invece, l’aumento di marcia si ha quando i giri motore alla marcia successiva sono sopra alla curva di cambiata.
Le curve di cambiata devono essere inserite in VECTO come input, a meno che non si lavori in Declaration mode. Qui, infatti, le curve vengono ricavate direttamente dalla curva a carico massimo del motore. La generica curva di cambiata viene definita considerando la coppia minima per la data marcia e la coppia massima del motore.
21
Figura 17: curve di cambio marcia.
La modalità di saltare una marcia è attiva sia per il cambio manuale che automatico. Ogni volta che si è nelle condizioni di cambio marcia VECTO può saltare una o più marcie e passare direttamente alla successiva se ha accumulato una riserva di coppia sufficiente (Figura 18).
22
Figura 18: esempio del salto di marcia
Il cambio marcia anticipato, Figura 19, è attivo solo per la modalità a cambio manuale. Viene attuato nel caso in cui il punto di funzionamento alla marcia successiva (punto B) si trova in condizioni di avere una riserva di coppia adeguata e un numero di giri motore superiore alla curva di scalata per quel rapporto.
Figura 19: cambio marcia anticipato.
A B
C
A: punto funz. Marcia1 B: punto funz. Marcia2 C: punto funz. Marcia3
A B
A: punto funz. Marcia1 B: punto funz. Marcia2
23
Regole di cambiata per trasmissione manuale
In questo paragrafo verranno descritte alcune caratteristiche riguardo alla definizione dei poligoni di cambiata nella Declaration mode di VECTO, secondo quanto riportato nell’ACEA Whitebook 2016.
Nella Declaration mode VECTO crea automaticamente i poligoni di cambiata, senza la necessita che vengano inseriti dall’utente. Il problema riguarda, quindi, come creare queste curve partendo dalle caratteristiche del motore e per ogni specifica marcia.
Il primo passo è quello di definire i punti caratteristici dei poligoni (Figura 20).
Figura 20: punti caratteristici poligoni di cambiata.
Nello specifico l’ACEA Whitebook definisce cinque punti secondo le caratteristiche di coppia e numero di giri. Le coordinate dei punti sono riassunte nella Tabella 5.
Punti N giri Coppia p1 𝑁𝑚𝑖𝑛𝑖𝑚𝑜/2 0 p2 𝑁𝑚𝑖𝑛𝑖𝑚𝑜∗ 1,1 0 p3 𝑁𝑣𝑚𝑎𝑥∗ 0,9 Coppia max @ (𝑁𝑣𝑚𝑎𝑥∗ 0,9) p4 𝑁 𝑣𝑚𝑎𝑥∗ (1 + 𝑑𝑖𝑓𝑓_𝑟𝑎𝑝𝑝𝑜𝑟𝑡𝑜 3 ) 0 p4 p2 p3 p1 p5 L1 L2 L3 L4
24
p5 𝑁95𝑚𝑎𝑥 Coppia max Tabella 5: punti che definiscono i poligoni di cambiata
dove 𝑁95𝑚𝑎𝑥 rappresenta il numero di giri massimo che garantisce di generare il 95% della potenza massima.
Questi cinque punti vanno a definire le linee che compongono i poligoni di cambiata secondo le intersezioni riportate in figura 20.
Un ulteriore limite è imposto alla linea L1 (definita in Figura 20 e 21), che prevede che si trovi al disotto di almeno il 2% dalla curva di coppia massima, nell’intervallo fra i giri minimi e il 95% dei giri del punto p3. se questa condizione non dovesse essere verificata, la linea verrebbe traslata fino a combaciare con la linea limite al 2% dalla coppia massima.
Figura 21: limite superiore alla curva di scalo marcia
Viene poi considerato il limite di distanza fra i poligoni di scalo marcia e di aumento marcia, (Figura 22), e questa distanza dipende dal valore dell’aumento del rapporto fra una marcia e l’altra nella scatola del cambio, secondo quanto riportato in Tabella 6.
2 %
25
Figura 22: distanza minima fra i poligoni di cambiata.
Punto N giri Coppia
p3’ rpm(p3)*(rapporto_i/rapporto_i+1)*1,07 coppia(p3)*(rapporto_i/rapporto_i+1) p2’ rpm(p2)*(rapporto_i/rapporto_i+1)*1,07 coppia(p2)*(rapporto_i/rapporto_i+1)
Tabella 6: punti che definiscono la curva di distanza minima tra i poligoni
Modellazione del convertitore di coppia
Il convertitore di coppia viene considerato come una marcia separata. Indipendentemente dal fatto che il convertitore sia in serie o in parallelo, VECTO usa una configurazione in serie. La coppia in ingresso al convertitore viene calcolata secondo la Formula 9, considerando una coppia in ingrasso al motore ad una velocità di riferimento del veicolo.
𝑇𝑖𝑛 = 𝑇𝑟𝑒𝑓(𝑣) ∗ ( 𝑛𝑖𝑛 𝑛𝑟𝑒𝑓) 2 (9) p3’ p2’
26
2.5.6.
Ausiliari
Nella modalità Declaration tutti glia ausiliari sono già definiti e hanno delle potenze specifiche in base al tipo di veicolo. L’utente può scegliere per ciascun ausiliario una tecnologia da una data lista.
Nella modalità Engineering va definita la richiesta di potenza da ogni singolo ausiliario. Per ogni ausiliario si procede calcolando la relativa velocità di rotazione, considerando un rapporto di trasmissione, poi si ricava la potenza consumata dall’ausiliario e la si aggiunge alla richiesta al motore.
2.5.7.
Presa di forza
In VECTO è possibile considerare anche una presa di forza nel modello del veicolo. Il modello considera due componenti, una trasmissione e un utilizzatore, e tre tipi di perdite, di trasmissione, sul ciclo e di minimo.
Figura 23: schema presa di forza.
Le perdite nella trasmissione sono considerate come dei consumi costanti di potenza, variabili in base al tipo di presa di forza.
Un ciclo di simulazione dell’a presa di forza, può essere attivato in momenti specifici del ciclo di guida quando il veicolo è fermo. Durante l’attivazione della presa di forza VECTO lo posiziona in mezzo alla fase di stop, facendone metà prima e metà dopo il ciclo di presa di forza, come rappresentato in Figura 24. I momenti 1 e 5 sono le fasi prima e dopo la fase di stop, nell’intervallo 2 il veicolo completa la fermata fino ad arrivare al minimo dei giri, nell’intervallo tre si ha il ciclo di presa di forza dove i giri motore si attestano al valore richiesto e infine il veicolo attua la seconda metà della fase di stop e poi prosegue il resto della missione. TRASMISSIONE PF trasm. ssioe n PF utilizzatore
27
Figura 24: esempio ciclo di guida con fase di fermata e presa di forza.
2.6.
Limitazioni di VECTO
Trai i limiti di VECTO vi è quello che il software deve essere costantemente aggiornato per poter seguire lo sviluppo delle tecnologie utilizzate per l’abbattimento dei consumi e delle emissioni di CO2.
Uno studio di Felipe Rodriguez (FUEL CONSUMPTION SIMULATION OF HDVS IN THE EU: COMPARISONS AND LIMITATIONS) e una presentazione dell’unione europea su VECTO riportano una serie di tecnologie non ancora pienamente coperte dal software. Dalla lista di queste tecnologie le principali sono: i turbocompressori elettrici; i sistemi di recupero del calore di scarto; i sistemi dual fuel; i sistemi ibridi elettrici; l’incorporazione automatica di specifici design aerodinamici dei rimorchi; declaration mode per veicoli inferiori alle 7.5 tonnellate.
Riguardo a questi limiti bisogna considerare che VECTO è pensato soprattutto per essere un software per la certificazione di veicoli già disponibili a livello commerciale, non è pensato per un utilizzo nel settore della ricerca, questo ne comporta un ritardo rispetto alle tecnologie più avanzate e la tendenza a coprire le tecnologie più utilizzate dai veicoli attualmente in commercio.
28
Capitolo 3
Creazione dei modelli di veicolo
In questo capitolo verranno descritte le assunzioni e i dati utilizzati per creare in VECTO differenti modelli di veicoli, per poi studiare e comparare nel capitolo successivo i risultati delle simulazioni.
Il lavoro prevede la creazione di quattro modelli di veicolo. I primi due saranno degli Iveco Daily in due differenti configurazioni motoristiche, il primo con motore diesel mentre il secondo con un motore alimentato a gas naturale. Gli ultimi due modelli saranno dei veicoli pesanti generici, un camion da 12 tonnellate e un bus interurbano.
Tutte le simulazioni sono state effettuate utilizzando la modalità Engineering di VECTO, in quanto solo in questa modalità è possibile uscire dai vincoli dei veicoli pesanti ed è possibile analizzare anche veicoli come l’Iveco Daily.
3.1.
Iveco Daily diesel
Il primo veicolo considerato è il modello con motore diesel dell’Iveco Daily, nello specifico il modello 70C21 a 3 litri di cilindrata.
3.1.1.
Veicolo
La definizione del modello parte dalle caratteristiche generali del veicolo, la maggior parte delle quali sono facilmente reperibili direttamente dal sito del produttore.
Nello specifico VECTO richiede l’inserimento delle masse del veicolo e dell’eventuale carico, del numero degli assi e delle dimensioni. Queste informazioni sono state ricavate dalla scheda tecnica del veicolo, Figura 25.
29
Figura 25: scheda tecnica Iveco Daily.
Per quanto riguarda il coefficiente di resistenza aerodinamica, questo è stato trovato per un modello simile di veicolo e utilizzato nel calcolo approssimando l’area frontale del veicolo ad una sezione rettangolare di altezza e larghezza pari a quelle del veicolo. Viene richiesto in oltre il valore del diametro dinamico della ruota (i.e. il diametro che la ruota ha quando il veicolo è in movimento), che è stato calcolato grazie ad un software online, che lo calcola in base al tipo di pneumatico, deciso dal listino del veicolo, e al modello del veicolo. Per quanto riguarda gli assi, va specificato, oltre al numero e a quali sono di
30 trazione, il coefficiente di resistenza al rotolamento, l’inerzia delle ruote e il tipo di pneumatico.
3.1.2.
Motore
La definizione del modello del motore può essere più complicata, in quanto non tutte le informazioni necessarie sono sempre di pubblico accesso. Infatti, mentre le caratteristiche principali del motore, come la cilindrata o la potenza massima, sono reperibili dalla scheda tecnica, le informazioni più dettagliate come le curva di coppia massima o la mappa dei consumi non sono disponibili ad un utente comune. Nella Figura 26 sono raccolti i parametri richiesti dal modulo motore, tra i quali è presente l’inerzia del motore. Per questo parametro va precisato che, essendo un valore difficile da trovare per chi non è il costruttore, è stata fatta un’assunzione prendendo come riferimento l’inerzia di un motore da 6,8 litri e considerando per il motore del Daily da 3 litri un’inerzia pari a poco più della metà di quella di riferimento.
Figura 26: dati generali motore Daily 3l diesel.
Per quanto riguarda le curve di carico massimo e minimo e la mappa dei consumi queste sono state fornite dal dipartimento come dati relativi a prove su banco del motore e sono riportate in forma grafica rispettivamente nelle Figure 27 e 28. Nella mappa dei consumi questi sono espressi in grammi all’ora.
Dal punto di vista pratico le curve di coppia e la mappa dei consumi vanno inserite nell’apposita cartella di lavoro di VECTO in formato CSV (Comma-Separated Values). Devono includere, per le curve di coppia, i valori di giri motore e la rispettiva coppia quantomeno nell’intervallo d’interesse della simulazione, per la mappa dei consumi, ogni valore di giri e coppia deve essere accompagnato dal relativo valore di consumo specifico.
31
Figura 27: curva di carico massimo e minimo Daily 3l diesel.
32
3.1.3.
Trasmissione
Nel modello del veicolo in VECTO è stato scelto una trasmissione a cambio manuale con rapporti definiti come quanto riportato in Tabella 7.
Marcia Rapporto ponte 4.56 1° 4.655 2° 3.173 3° 2.163 4° 1.474 5° 1.005 6° 0.7
Tabella 7: rapporti al cambio Daily 3l diesel.
Il rapporto al ponte e la prima ed ultima marcia sono presenti nella scheda tecnica. Per ottenere i rapporti intermedi si è proceduto calcolandoli secondo una progressione geometrica (10).
𝑟𝑛−1 = 𝑟𝑛∗ (𝑟1
𝑟𝑁)
1/(𝑁−1) (10)
dove 𝑟𝑛 rappresenta il rapporto della marcia ennesima e 𝑟1 e 𝑟𝑁 i rapporti della prima ed ultima marcia, entrambi noti e forniti nella scheda tecnica.
Come strategia di cambiata vengono utilizzati i poligoni definiti da VECTO secondo la procedura riportata nel paragrafo 2.4.5 di questa tesi.
3.2.
Iveco Daily a gas naturale
Questo modello di veicolo rappresenta l’Iveco Daily 50C14NV alimentato a gas naturale compresso. Il veicolo differisce leggermente da quello precedente in termini di caratteristiche del motore, che tuttavia mantiene la stessa cilindrata, di masse e soprattutto di rapporti di trasmissione.
3.2.1.
Veicolo
Le informazioni riguardanti la modellazione generale del veicolo sono state prese dalla scheda tecnica del veicolo disponibile dal sito del produttore. Sono state fatte le medesime assunzioni, come per il caso del Daily diesel, riguardo al coefficiente di resistenza aerodinamica e al raggio dinamico degli pneumatici.
3.2.2.
Motore
Come per il caso precedente le caratteristiche generali del motore sono reperibili dalla scheda tecnica, mentre la curva di coppia massima e la mappa dei consumi sono state
33 fornite dal dipartimento come dati sperimentali. Nelle Figure 29 e 30 sono riportati rispettivamente le curve di carico massimo e minimo e la mappa dei consumi.
34
Figura 30: mappa dei consumi (g/h) Daily 3l CNG
3.2.3.
Trasmissione
Per quanto riguarda la trasmissione questo veicolo presenta dei rapporti diversi dal precedente, avendo differenti caratteristiche del motore. Come nel caso precedente sono disponibili dalla scheda tecnica i valori del rapporto al ponte e dei rapporti della prima e dell’ultima marcia, mentre per i rapporti intermedi si è proceduto secondo progressione geometrica (Tabella 8). Marcia Rapporto ponte 3.615 1° 5.375 2° 3.664 3° 2.498 4° 1.702 5° 1.160 6° 0.791
Tabella 8: rapporti al ponte e marcie Daily 3l CNG
La strategia di cambiata viene definita, come nel caso precedente, in maniera automatica da VECTO secondo il procedimento descritto al paragrafo 2.4.5.
35
3.3.
Veicolo pesante del gruppo 9
Viene ora introdotto un veicolo di categoria diversa dall’Iveco Daily, con lo scopo di avere un termine di paragone con un veicolo pesante, in modo da inquadrare meglio i dati che verranno successivamente ricavati dalle prime due simulazioni in comparazione con un veicolo pesante.
3.3.1.
Veicolo
Il terzo veicolo considerato nella simulazione è un camion appartenente al gruppo 9, secondo la classificazione adoperata dalla commissione europea per la certificazione delle emissioni di CO2 dei veicoli pesanti. Il gruppo 9, Figura 31, definisce veicoli di tutte le masse dotati di tre assi, di cui una motrice.
Figura 31: veicolo pesante gruppo 9.
Per quanto riguarda le caratteristiche generali del veicolo, queste sono state considerate uguali a un modello di veicolo di questo tipo già presente nel database di VECTO. La massa complessiva risulta di 18600 kg considerando il cassone e un carico da 7100 kg.
3.3.2.
Motore
Il motore di questo veicolo è un 7 litri diesel da 324 kW di potenza. Le curve di carico massimo e minimo, Figura 32, sono già presenti nel modello del veicolo.
36
Figura 32: curve di coppia veicolo pesante gruppo 9.
La mappa dei consumi, Figura 33, è anch’essa presente nel modello del veicolo. I dati della sono stati elaborati con Matlab per ottenerne una rappresentazione grafica con curve di livello indicanti i consumi in grammi all’ora.
37
Figura 33: mappa consumi (g/h) veicolo classe 9.
3.3.3.
Trasmissione
La trasmissione di questo veicolo presenta un cambio manuale automatizzato a 12 rapporti, tutti definiti nel modello esistente in VECTO, con anche le rispettive mappe di perdita coppia. Anche la strategia di cambiata è definita da VECTO secondo il metodo dei poligoni di cambiata.
3.4.
Bus interurbano
L’ultimo modello di veicolo considerato è quello di un bus interurbano, che verrà simulato su un ciclo diverso dagli altri modelli considerati. Questo modello è stato introdotto per avere un ulteriore temine di paragone di veicolo con caratteristiche diverse, oltre al veicolo pesante di classe 9, da affiancare ai risultati dei due modelli di Iveco Daily.
3.4.1.
Veicolo
Questo bus è un veicolo a tre assi di cui una motrice, ha una massa comprensiva di carico di circa 20000 kg. Gli altri parametri quali la resistenza aerodinamica e la resistenza al rotolamento sono definiti da VECTO, mentre il fattore di correzione per il vento
38 trasversale è definito secondo il procedimento utilizzato nella Declaration mode e descritto nel paragrafo 2.4.3 di questa tesi.
3.4.2.
Motore
Questo veicolo ha un motore diesel da 7,7 litri e 250kW le cui caratteristiche sono già presenti nel modello nel database. Nelle figure 34 e 35 sono rappresentate le curve di coppia massima e di carico minimo e la mappa dei consumi.
39
Figura 35: mappa consumi (g/h) bus interurbano.
3.4.3.
Trasmissione
Questo veicolo presenta un cambio manuale a 6 rapporti definiti nel modello, così come le mappe di efficienza di ciascun rapporto. La strategia di cambiata è sempre definita dai poligoni definiti in funzione della curva di coppia.
40
Capitolo 4
Simulazione dei veicoli su cicli di guida
In questo capitolo verranno descritti dapprima i cicli di guida utilizzati nelle simulazioni, per poi proseguire con la presentazione dei risultati ottenuti. I risultati delle simulazioni saranno in termini di punti di funzionamento del veicolo durante il ciclo, da rappresentare nella mappa dei consumi, e in termini di risultati complessivi per ogni ciclo.
4.1.
Cicli di guida
VECTO è un software di simulazione pensato per il processo di certificazione delle emissioni di CO2 e dei consumi dei veicoli pesanti. Per questo motivo i cicli di guida implementati direttamente nel software sono quelli relativi al WHTC (Worldwide Harmonised Transient Cycle, Figura 36 e 37) nei tre diversi profili di missione, che sono urbano, rurale e autostrada. Il ciclo WHTC è il ciclo di certificazione dei veicoli pesanti, quindi adatto agli ultimi due modelli considerati, tuttavia si è deciso di simulare anche i due modelli di Iveco Daily sullo stesso tipo di ciclo per mantenere un termine di paragone tra i risultati ottenuti.
Per una maggior completezza del lavoro, si è deciso poi di implementare in VECTO anche il ciclo di certificazione dei veicoli leggeri, il WLTP (Worldwide harmonised Light vehicles Test Procedures, Figura 38), che verrà utilizzato per creare due nuove simulazioni per i modelli di Iveco Daily considerati. Il WLTP è stato creato con lo scopo di essere usato come test globale per differenti regioni, cosi che le emissioni e i consumi possano essere paragonabili su vasta scala. Nello specifico il ciclo WLTP prevede tre varianti in base alla classe del veicolo leggero considerato. L’Iveco Daily diesel con la sua potenza specifica di circa 53 W/kg finisce nella classe 3, cioè veicoli con potenza specifica superiore a 34 W/kg, così come il modello a gas naturale con 37 W/kg.
Solo per il modello del veicolo pesante si è considerato, oltre ai cicli WHTC urbano e regionale, anche un ciclo di guida che prevede l’utilizzo all’interno di esso della presa di forza PTO (Power Take-off). Questa sarà azionata, come descritto nel paragrafo 2.4.7, solo durante le fasi di sosta del veicolo.
41
Figura 36: ciclo di guida con presa di forza (PTO).
Figura 37: WHTC, profilo regionale, in funzione della distanza.
Figura 38: WHTC, profilo urbano, in funzione della distanza.
0 20 40 60 80 100 1 32 63 94 125 156 187 218 249 280 311 342 373 404 435 466 497 528 559 590 621 652 683 714 745 776 ve locità [ km/h ] spazio [m]
ciclo con PTO
ciclo guida PTO [on/off] 0 10 20 30 40 50 60 70 80 90 0 5000 10000 15000 20000 25000 30000 ve locità [ km/h ] distanza [m]
regional WHTC
0 10 20 30 40 50 60 70 80 90 0 5000 10000 15000 20000 25000 30000 ve locità [ km/h ] distanza [m]urban WHTC
42
Figura 39: WLTP in funzione del tempo.
Bisogna poi specificare che i file relativi ai differenti cicli di guida presentano dei formati diversi. I due cicli WHTC sono forniti da VECTO in funzione della distanza percorsa dal veicolo. Nel file vengono fornite in funzione della distanza percorsa, la velocità obbiettivo, la pendenza della strada e l’eventuale tempo di sosta. In ciclo WLTP è stato inserito in un formato, anch’esso supportato da VECTO, che fornisce la velocità del veicolo in funzione del tempo trascorso, fornendo così esplicitamente i momenti di sosta nel grafico velocità tempo.
4.2.
Risultati delle simulazioni
Una volta completati i modelli è possibile avviare la simulazione in VECTO. Come risultati si otterranno per ogni passo del ciclo di guida una serie di parametri relativi al flusso energetico nel veicolo. Per ogni componente interessato dal flusso di potenza, è presente nei risultati la potenza all’albero in ingresso e le perdite di potenza del componente. Per il motore vengono dati i valori di coppia, giri e potenza usati per il calcolo dei punti di funzionamento sulla mappa dei consumi. Nell’Allegato 1 sono riportati i risultati completi di una simulazione. In questo paragrafo verranno rappresentati questi risultati, per tutti le simulazioni svolte, sottoforma di punti di funzionamento (giri, coppia, consumi) del motore e inseriti nella mappa dei consumi, utilizzando Matlab per ordinare e rappresentare tutti i dati in una forma grafica di più facile lettura (da Figura 40 a Figura 48).
VECTO raccoglie poi in un altro file una serie di risultati complessivi dell’intero ciclo, come ad esempio il valore di CO2 emessa durante il ciclo, i consumi totali e i valori di
0.0 20.0 40.0 60.0 80.0 100.0 120.0 140.0 0 57 114 171 228 285 342 399 456 513 570 627 684 741 798 855 912 969 1026 1083 1140 1197 1254 1311 1368 1425 1482 1539 1596 1653 1710 1767 Ve locità [ km/h ] Tempo [s]
WLTP class 3
43 potenza media o energia totale persa a causa dei vari componenti. In questo paragrafo saranno rappresentati solo alcuni dei risultati complessivi (Tabella 9), i consumi di carburante e le emissioni di CO2.
VEICOLO CICLO Consumo carburante [g/h] Consumo carburante [g/km] Consumo carburante [l/100km] CO2 [g/km] Iveco Daily diesel WHTC regionale 5238.1016 88.1642 10.546 275.9539 WHTC urbano 3936.6824 126.7042 15.156 396.5841 WLTP 5834.2591 127.0655 15.1992 397.715 Iveco Daily gas naturale WHTC regionale 5466.9407 92.6357 / 249.19 WHTC urbano 4321.3162 139.7085 / 375.8158 WLTP 5883.8588 130.9728 / 352.3169 veicolo pesante classe 9 presa di forza 5820.2556 2423.2178 289.8586 7584.6716 WHTC regionale 13408.3833 224.6856 26.8763 703.2659 WHTC urbano 8960.4974 287.6533 34.4083 900.3548 bus WHTC regionale 14738.747 250.1218 29.9189 782.8811 WHTC urbano 9721.9038 314.4047 37.6082 984.0868
Tabella 9: consumi ed emissioni di CO2, per i differenti cicli e veicoli.
4.2.1.
Iveco Daily diesel
Va precisato che nei due modelli di veicoli Iveco, le mappe dei consumi sono state fornite ‘tagliate’ al valore minimo di 14 Nm anziché continuare fino alla curva di carico minimo del motore. Per questo motivo si è assunto un consumo costante al valore relativo a 14 Nm, per il rispettivo intervallo di giri motore, al di sotto della mappa e fino agli 0 Nm, approssimazione considerata lecita per via del grande valore di coppia massima. Per i valori negativi di coppia è stato considerato un valore di consumo nullo dovuto al cut off del combustibile. Per questi motivi le mappe dei primi due modelli di veicolo, cioè quelle relative agli Iveco Daily, presenteranno dei punti di funzionamento al di fuori di esse, mentre nel caso degli ultimi due modelli tutti i punti ricadranno nelle mappe dei consumi, dato che le mappe presenti nei modelli di veicolo su VECTO sono state definite fino alla curva di carico minimo.
44
Figura 40: WHTC urbano, Iveco Daily diesel. Consumi g/h.
45
Figura 42: WLTP, Iveco Daily diesel. Consumi g/h.
4.2.2.
Iveco Daily gas naturale
46
Figura 44: WHTC regionale, Iveco Daily gas naturale. Consumi g/h.
47
4.2.3.
Veicolo pesante del gruppo 9
Figura 46:WHTC urbano, veicolo pesante classe 9. Consumi g/h.
48
4.2.4.
Bus interurbano
Figura 48: WHTC urbano, bus interurbano. Consumi g/h.