CAPITOLO 8
Conclusioni
Nel campo del Reverse Enginnering, l’utilizzo di sistemi ottici è abbastanza recente, questo ha comportato una notevole difficoltà nel reperire norme riguardanti la loro validazione. Difatti l’unica norma rintracciata, che poi in realtà è un regolamento interno dell’ordine degli ingegneri tedeschi, è la VDI/VDE 2634 Part 2.
Nel lavoro appena concluso è stato definito un procedimento di validazione di un sistema di visione stereo, per rilievo di forme tridimensionali in una singola scansione. Tale procedimento è stato ottenuto elaborando la norma VDI/VDE 2634 Part 2, che è risultata essere l’unica norma, a livello internazionale, che riguarda i sistemi ottici. L’integrazione di questa norma è stata fatta osservando la carenza, della stessa, riguardo i provini da utilizzare nel processo di validazione. Infatti vengono utilizzati elementi di forma sferica, un manubrio, forma di facile acquisizione che si presta bene a manipolazioni di post-processing. Questa considerazione ha spinto a definire dei provini con spigoli di varie alzate, per poter determinare una più accurata descrizione sulle prestazioni del sistema. Questo ha comportato l’introduzione di due nuovi parametri, come la precisione lungo Z e la risoluzione lungo Z, asse del digitalizzatore (Figura 6.3). Inoltre è stata definita una procedura di confronto, tra due sistemi, per verificarne la precisione, attraversa la sostituzione dei provini in ceramica, prescritti dalla VDI/VDE, con provini in comune acciaio, più economici. Questo è stato fatto sostituendo i parametri R ed RE , prescritti dalla norma, con R* ed RE*, definiti dai nuovi provini.
Lo studio è proseguito con un’applicazione pratica dei sistemi ottici, attraverso un controllo dimensionale di un segmento statorico appartenete ad una turbina del motore GE90.
Prima è stato acquisito il pezzo al fine di generare una nuvola di punti, attraverso più acquisizioni, necessarie per coprire l’intero segmento statorico, per poi eseguire il confronto con il modello, di riferimento, CAD. Le nuvole ottenute sono state allineate attraverso opportuni software, dove non è stato possibile l’unione, delle stesse, in modo automatico, grazie alla tavola rotante utilizzata durante le acquisizioni.
Il controllo dimensionale con sistemi ottici, di un elemento abbastanza complesso, ha permesso di verificare la bontà di questi sistemi, rispetto alle tradizionali macchine a contatto. Difatti i tempi, gli ingombri e i costi sono decisamente minori utilizzando un sistema ottico. Per contro l’accuratezza e la precisione dipendono fortemente dal sistema e dal pezzo da
Capitolo 8 – Conclusioni 101
verificare. Infatti ogni volta che uniamo due nuvole, si aggiunge un errore a quello intrinseco nel sistema stesso, pertanto, più il pezzo è complesso e maggiori sono le acquisizioni necessarie, che poi vanno unite, aumentando l’errore finale.
Quest’ultima riguarda una singola acquisizione, mentre in realtà per controlli dimensionali di pezzi anche semplici, c’è bisogno di farne molte. Possibile sviluppo sarà, pertanto, la definizione di norme incentrate sul processo multiscansione, così da avere un valore certo dell’errore del sistema. Si capisce che la conoscenza dell’errore del sistema è di fondamentale importanza per operare in campo di verifica dimensionale, anche per scartare quegli elementi la cui tolleranza è inferiore all’errore stesso del sistema ottico.
APPENDICE A
Grafici completi relativi allo studio preliminare di integrazione della norma
VDI/VDE 2634 Part. 2
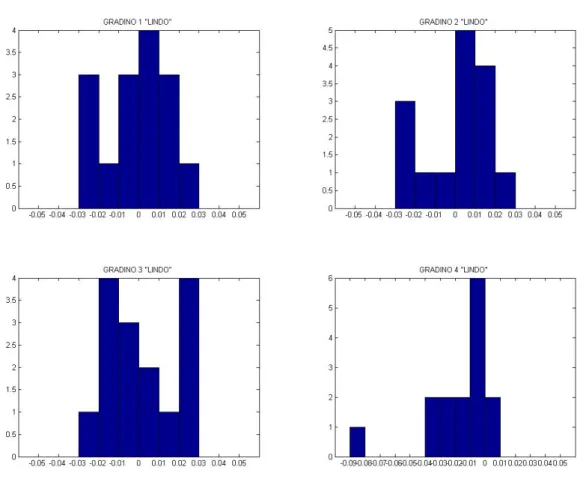
Nella presente appendice verranno illustrati, tutti i grafici che sono stati ottenuti durante lo studio descritto nel capitolo 6. Le figure da A.1 ad A.4 rigurdano il Provino 1 nelle sue quattro configurazioni, mentre la A.5 è riferita al Provino 2.
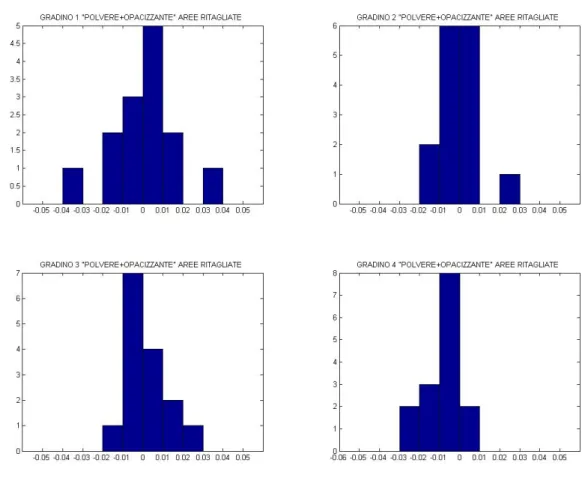
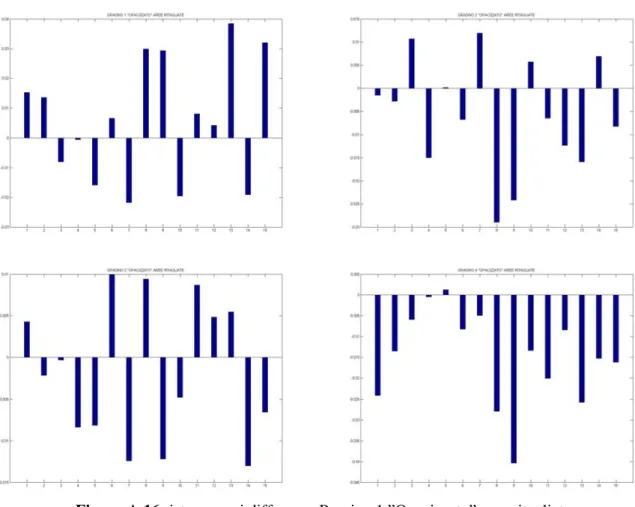
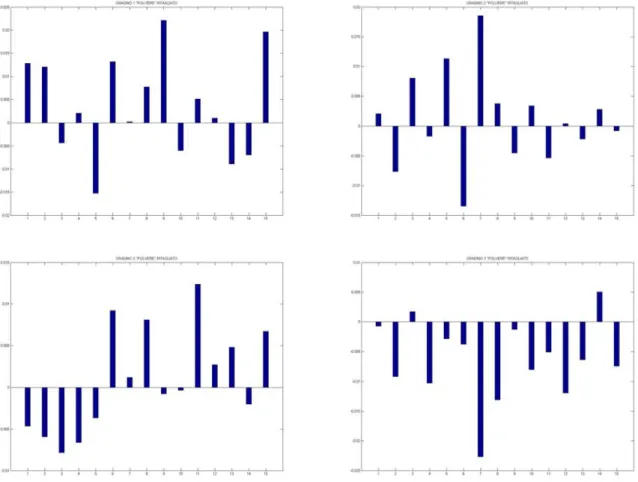
Le figure da A.6 a A.9 rigurdano il Provino 1, mentre la A.10 il Provino 2, tutte con aree ritagliate. Tutte queste figure riguardano le aree complete e sono gli istogrammi classici. Le figure da A.11 a A.14, sono gli istogrammi differenza del Provino 1, con aree complete. Le figure da A.15 a A.18 sono invece riferite alle aree ritagliate, sempre del Provino 1.
Appendice A 103
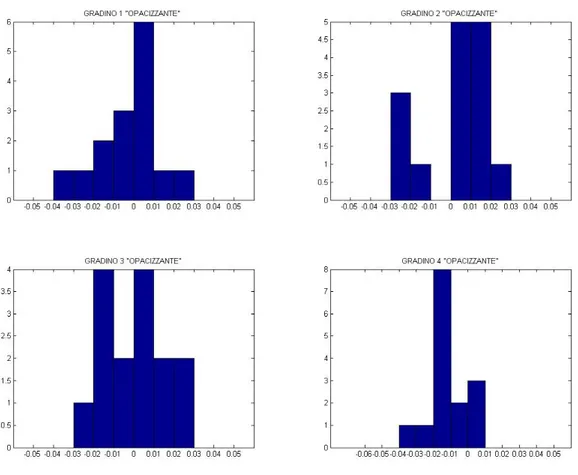
Figura A.2: istogrammi Provino 1 “Opacizzato” aree complete.
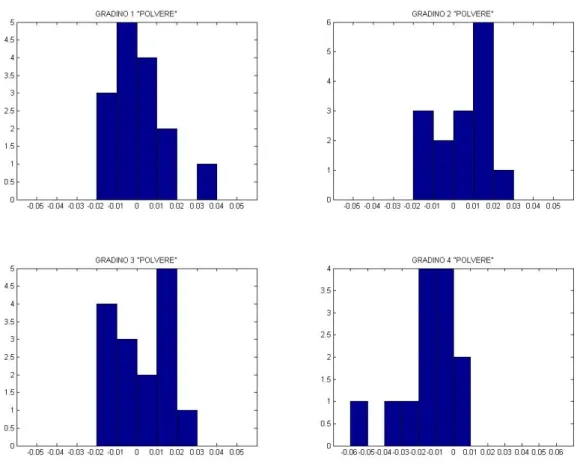
Figura A.4:istogrammi Provino 1 “Polvere” aree complete.
Appendice A 105
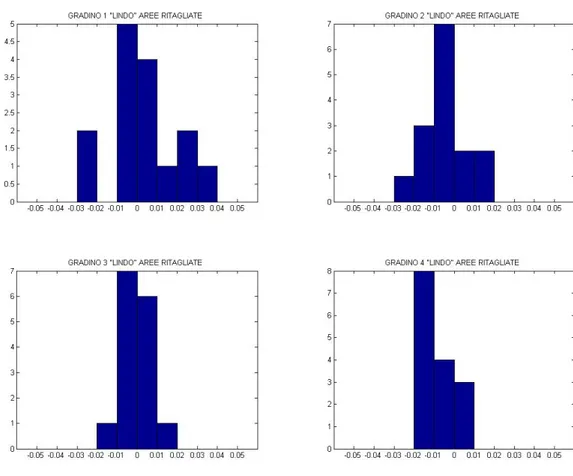
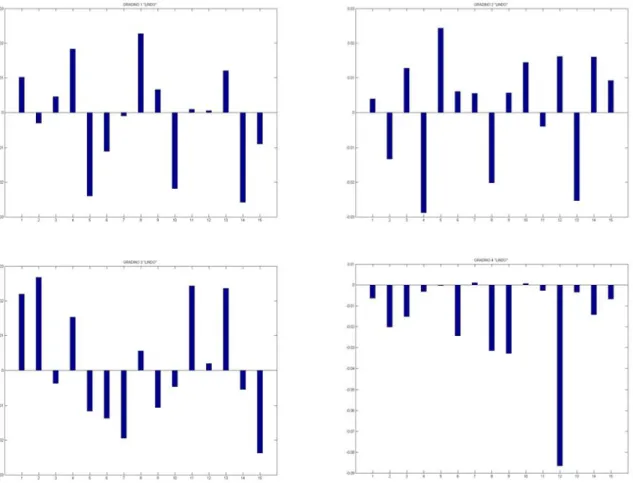
Figura A.6: istogrammi Provino 1 “Lindo” aree ritagliate.
Figura A.8: istogrammi Provino 1 “Opacizzato+Polvere” aree ritagliate.
Appendice A 107
Figura A.10: istogrammi Provino 2 “Polvere” aree ritagliate.
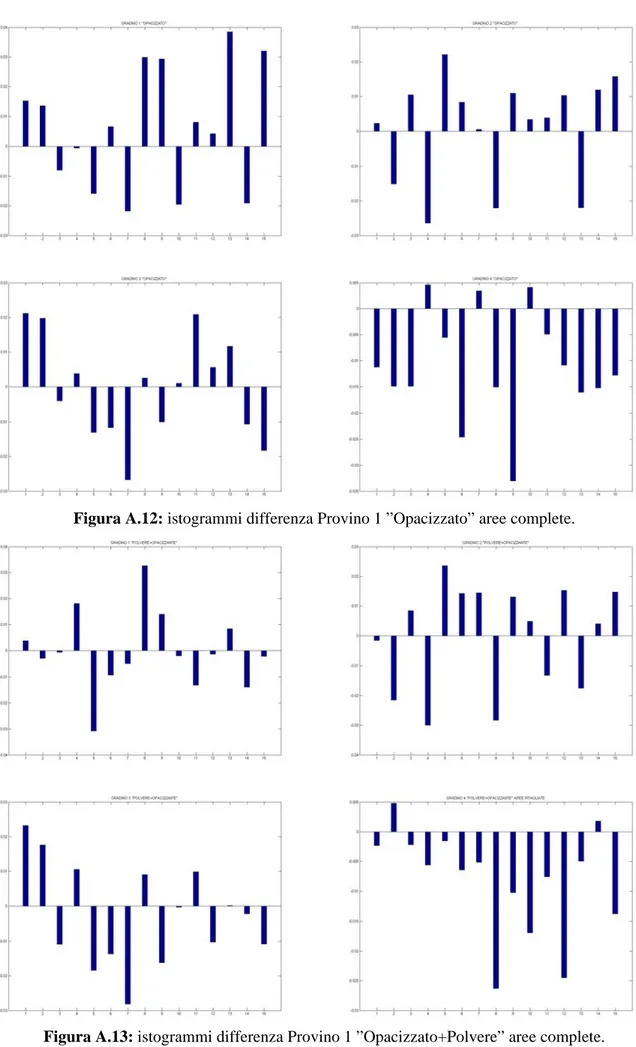
Figura A.12: istogrammi differenza Provino 1 ”Opacizzato” aree complete.
Appendice A 109
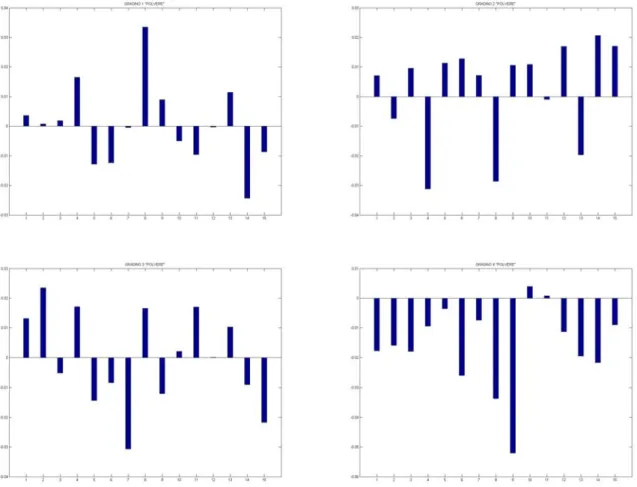
Figura A.14: istogrammi differenza Provino 1 ”Polvere” aree complete.
Figura A.16: istogrammi differenza Provino 1 ”Opacizzato” aree ritagliate.
Appendice A 111
Bibliografia
[1] RAZIONALE A. V. , Metodologie ottiche per il rilievo di forme tridimensionali, Tesi di Dottorato in Ingegneria Meccanica presso il DIMNP dell’Università di Pisa, 2004.
[2] SALVI J., J. PAGÉS, J. BATLLE. Pattern Codification Strategies in Structured
LightSystems, Pattern Recognition 37(4), pp. 827-849, April 2004
[3] KRATTENTHALER W., MAYER K.J., DUWE H.P., 3D surface measurement with
coded light approach, Fourth International Workshop for Digital Image Processing and
Computer Graphics, 12, Graz, 1993, 103-114.
[4] POSDAMER J.L., ALTSCHULER M.D, Surface Measurement by Space Projected
Encoded Beam Systems, Computer Graphics and Image Processing”, 18(1), 1987, 1-17.
[5] BARONE S., A fast reverse engineering method based on stereo vision and grid
projection, Atti del Dipartimento di Ingegneria Meccanica Nucleare e della Produzione,
Università di Pisa, DIMNP 011(2003).
[6] BARONE S., BRUNO A., Stereo vision and laser stripers for three-dimensional surface
measurements, Proceedings of the XVI Congreso Internacional de Ingeniería Gráfica,
Saragoza, 2004.
[7] BARONE S., CURCIO A., RAZIONALE A.V., A structured light stereo system for
reverse engineering applications, XIII ADM - XV INGEGRAF International Conference on
Tools and Methods Evolution in Engineering Design e Atti del IV Seminario Italo-Español, Reverse Engineering Techniques and Applications, Naples 2003, pp.65-74.
[8] BARONE S., CURCIO A., RAZIONALE A.V., Acquisizione e ricostruzione delle forme
aerodinamiche di una vettura sportiva, Atti del Convegno “Reverse Engineering: potenzialità
e applicazioni”, Modena, 2004, pp.85-100.
[9] BARONE S., PICCININI L., RAZIONALE A. V., Application of a reverse engineering
methodology to model aerodynamic shapes of sport cars, Proceedings of the 3D Modelling
2004, Paris, 2004.
[10] BARONE S., PICCININI L., RAZIONALE A. V., Verifica sperimentale di un sistema a
luce strutturata per il rilievo di forma, Atti del Convegno Nazionale XIV ADM – XXXIII
AIAS “Innovazione nella Progettazione Industriale”, Bari, 2004.
[11] UNI EN ISO 10360, Prove di accettazione e prove di verifica periodica per macchine di
Bibliografia 113
[12] UNI CEI EN ISO/IEC 17025, Requisiti generali per la competenza dei laboratori di
prova e di taratura, Novembre 2000.
[13] VDI/VDE 2634 Part 2, Optical 3-D measuring systems, Optical systems based on area
scanning, Agosto 2002.
[15] LOMBARDO M. , Ricostruzione 3d di uno scafo per imbarcazioni da regata mediante
tecniche di Reverse Engineering, Tesi di Laurea in Ingegneria Aerospaziale presso
l’Università di Pisa, 13 Febbraio 2005.
[16] ROSSI A. , A form of deviation-based method for coordinate measuring machine
sampling optimization in an assessment of roundness, ITM dell’Università di Pisa.
[17] ROSSI A. , A minimal inspection sampling technique for roundness evaluation, ITM dell’Università di Pisa.
[18] LAZZARI A. , IUCULANO G. , Evaluation of the uncertainty of an optical machine
with a vision system for contact-less three-dimensional measurement, Science@Direct, 30
Ottobre 2004.