6.1 Modelli macroscopici
Introduzione
In questa sezione vengono descritti dei modelli tridimensionali che permettono di studiare il comportamento macroscopico del muscolo nella fase di apertura dell’accesso chirurgico in artroprotesi d’anca (vedi capitolo 2); inizialmente è stata considerata la regione del corpo compresa tra la parte superiore del bacino e i condili (modello completo), riducendo poi il dominio alla zona effettivamente influenzata dalla retrazione (modello ridotto).
Trattandosi di modelli macroscopici, il volume delimitato esternamente dalla pelle e internamente dalle ossa è stato considerato completamente riempito di tessuto molle (pelle e muscolo).
Quest’ultimo è stato modellato come un materiale pressoché incomprimibile e iperelastico (in regime di grandi spostamenti), la cui analisi richiede una formulazione mista U-P degli elementi (vedi cap.4) e l’introduzione di due diversi tipi di non linearità: quella legata alle caratteristiche del materiale e quella geometrica dovuta ai grandi spostamenti.
Infine, utilizzando il modello tridimensionale della sola regione d’interesse influenzata dalla retrazione, è stato sviluppato un confronto tra pelle e muscolo considerando i valori forniti dalla letteratura [1, 2].
6.2 Modello completo
Materiali e metodi
Si è costruito un primo modello tridimensionale che descrive la regione compresa tra i condili e il bacino; si è ipotizzato, in questa prima analisi che il volume delimitato esternamente dalla pelle e internamente dal bacino e dal femore fosse completamente riempito da tessuto molle. Si sono estratte dal software Datamanager le superfici della pelle (Fig.6.1), del bacino e del femore (in formato STL) appartenenti alla regione sopra definita.
Fig. 6. 1: superficie della pelle
Le superfici estratte in formato STL sono state importate in Geomagic dove sono state esesguite alcune semplificazione come quella di attaccare tra loro bacino e femore all’altezza della testa di quest’ultimo, chiudere il forame otturato presente sull’ileo nonché escludere le mani dalla modellazione solida per semplificare la costruzione della mesh (Fig.6.2 e Fig.6.3)
Fig. 6. 2 : semplificazioni eseguite sul bacino e sul femore
Fig. 6. 3: semplificazioni eseguite sulla pelle
Successivamente si è passati alla costruzione delle patches, vere e proprie pezze parametrizzate che costituiscono una base di appoggio per la mesh; questa fase è estremamente importante perché la forma e la regolarità delle patches influenza direttamente la qualità degli elementi della mesh (Fig.6.4).
E’ necessario definire cosa intendiamo per qualità della mesh: dobbiamo fare in modo che gli elementi non si deformino eccessivamente per inseguire la geometria (cosiddetta fase di boundary recover); dal punto di vista quantitativo esistono degli indici che ci forniscono una valutazione della qualità della mesh (aspect ratio, jacobiano, warpage, etc.).
Basandosi su questi indici i codici di calcolo agli elementi finiti eseguono un controllo della mesh segnalando quali sono gli elementi che risultano eccessivamente distorti ancor prima di applicare le condizioni di carico; appare evidente che la qualità della mesh influenza direttamente l’accuratezza dei risultati.
Fig. 6. 4: fase di preparazione per la costruzione delle patches
Il volume compreso tra le ossa (Fig.6.5) e la pelle (Fig.6.6) è stato costruito in Unigraphics NX 2 ( Insert ⇒ Feature Operations ⇒ Sew).
La modellazione del taglio è stata ottenuta mediante sottrazione booleana tra il volume appena costruito e un parallelepipedo che ha spessore 0.5 mm, lunghezza 100 mm e larghezza tale da raggiungere la zona della testa del femore interessata direttamente dall’operazione (in Fig.6.5 è visibile il parallelepipedo utilizzato per modellare l’incisione).
Fig. 6. 6: contorno esterno del dominio
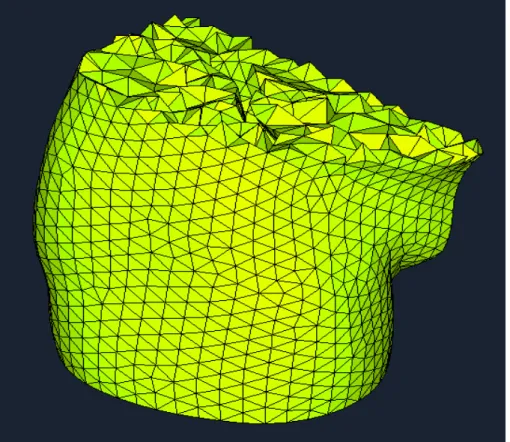
La costruzione della mesh, ultima fase nell’operazione di modellazione, è stata eseguita avvalendosi del software HyperMesh; si è costruita una mesh piana triangolare sia della pelle, che rappresenta il contorno esterno del volume, sia del femore ed ileo con l’appendice del parallelepipedo che identifica il taglio (Fig.6.7 e Fig.6.8).
Fig. 6. 8: mesh triangolare piana sul contorno interno
Partendo dalla mesh piana costruita sul contorno del volume si è ottenuta quella tridimensionale secondo la tecnica dell’advancing front nella quale la definizione degli elementi tridimensionali parte proprio dal contorno e si sviluppa verso l’interno avanzando per strati; questo è l’algoritmo più utilizzato nei problemi di modellazione solida ed è caratterizzato da un boundary recover massimo sul bordo del dominio mentre il condizionamento degli elementi peggiora andando verso l’interno (in casi estremi può rimanere un foro centrale).
Avendo adottato una dimensione degli elementi piani pari a 20 mm si ottiene una mesh tridimensionale costituita da 26313 tetraedri.
Poiché l’analisi iperelastica richiede elementi di secondo ordine (cioè elementi che hanno anche un nodo in mezzo ad ogni lato) l’ordine degli elementi è stato cambiato utilizzando il comando order change. Gli elementi SOLID 187 sono tetraedri costituiti da dieci nodi con tre gradi di libertà per ogni nodo (Fig.6.9); supportano formulazione iperelastica in regime di grandi deformazioni e consentono una formulazione mista U-P che garantisce un comportamento migliore in termini di convergenza nella risoluzione di problemi in campo elastico nei quali il mezzo sia incomprimibile [2,3,4].
I tetraedri così costruiti hanno10 nodi e vengono importati in ANSYS 8.0 come SOLID 187. Un elemento di secondo ordine ha la caratteristica di avere funzioni di forma non lineari, in particolare quadratiche e, di conseguenza i lati dell’elemento non sono più costretti a rimanere
Fig. 6. 9: rappresentazione schematica dell’elemento SOLID 187
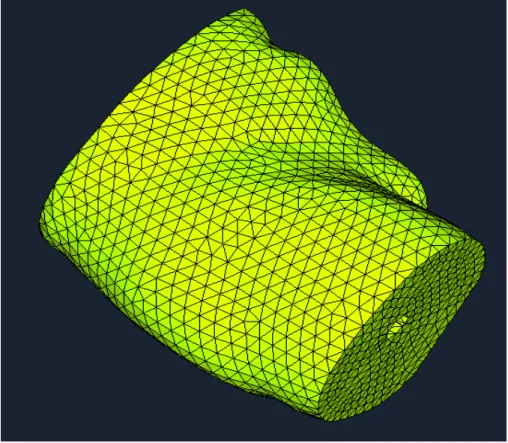
Di seguito è riportata un’immagine della mesh risultante e una sezione per osservare la disposizione degli elementi all’interno (Fig.6.10 e Fig.6.11).
Fig. 6. 11: disposizione degli elementi all’interno del dominio
Oltre agli elementi tridimensionali sono stati importati in ANSYS anche gli elementi appartenenti alla mesh piana triangolare costruita sul contorno interno (femore bacino e taglio) perché utili nell’applicazione delle condizioni al contorno.
Per quanto riguarda gli elementi piani questi vengono importati in ANSYS come elementi di tipo PLANE 35 che è un elemento triangolare a 6 nodi e quindi si tratta di un elemento quadratico.
Condizioni al contorno
Si è considerata la condizione di perfetta adesione tra muscolo e ossa, ad eccezione della coscia destra per quanto riguarda la regione del taglio; tale condizione si traduce, in termini di vincoli, nel blocco di tutti i gradi di libertà dei nodi che si trovano all’interfaccia tra muscolo e ossa.
Per applicare questa condizione è stato sufficiente selezionare gli elementi PLANE 35 (attraverso l’opzione select entities) e selezionare i nodi da vincolare bloccandone tutti i gradi di libertà (Fig.6.12 e Fig.6.13).
Fig. 6. 12: elementi piani PLANE 35
Fig. 6. 13: condizione di perfetta adesione muscolo osso
Si è fatto riferimento ad un retrattore che presenta le dimensioni tipiche utilizzate nella pratica clinica per la retrazione dei fasci muscolari (Fig.6.14); per selezionare in modo univoco i nodi interessati dall’azione del retrattore si è costruito un sistema di riferimento locale con asse X diretto secondo la lunghezza del taglio e asse Z ortogonale al piano del taglio (Fig.6.15); utilizzando questo sistema di riferimento si sono selezionati i nodi con le seguenti caratteristiche:
Z=0 ; X=30-70; Y=0-100. Z=0.5 ; X=30-70; Y=0-100.
Ai primi si è imposto uno spostamento di –37 mm nella direzione Z del sistema locale e, ai secondi uno spostamento di 37 mm nella stessa direzione ottenendo la situazione di Fig.6.16.
Fig. 6. 14: dimensioni del retrattore utilizzato
Proprietà del materiale
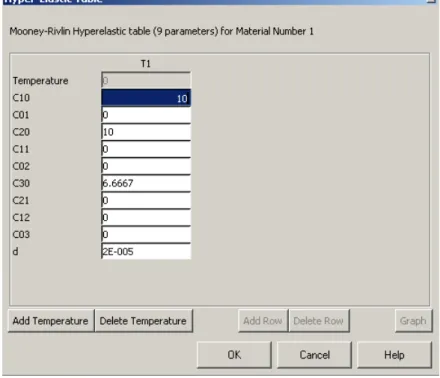
Ci sono due possibili modi di implementare le proprietà del tessuto muscolare: la prima è quella di sfruttare direttamente i coefficienti di Mooney-Rivlin forniti dal lavoro di Meier [5], oppure introducendo un set di dati relativi alla curva stress-strain [6] e lasciando al software il compito di calcolare i coefficienti relativi ad una data formulazione (Mooney, Ogden, etc.). In questo primo studio sono stati utilizzati i dati forniti dal lavoro di Meier che ha permesso di descrivere il comportamento iperelastico del muscolo con un modello di Mooney-Rivlin a 9 parametri (Fig.6.17):
Fig. 6. 17: modello di Mooney a 9 parametri
Dove i valori sono espressi in MPa ad eccezione di d, parametro adimensionale che rappresenta un indice di comprimibiltà del mezzo esprimibile come:
dove ν è il modulo di Poisson del materiale assunto pari a 0.4999 [3] che descrive un materiale pressoché incomprimibile.
Occorre sottolineare che il modello introdotto è comunque isotropo, infatti, all’interno del codice ANSYS non è possibile descrivere un materiale che sia al contempo iperelastico e anisotropo; tuttavia questa ipotesi non è molto restrittiva in questo primo modello nel quale il volume considerato è completamente riempito da tessuto molle.
Risultati
Questo modello, con le condizioni al contorno sopra descritte non convergeva a causa di un errore nella formulazione degli elementi cioè per l’eccessiva distorsione degli elementi in regime di grandi spostamenti.
E’ stata necessaria una riduzione della dimensione degli elementi anche se questo comporta un aumento del numero di incognite e quindi tempi di calcolo elevati.
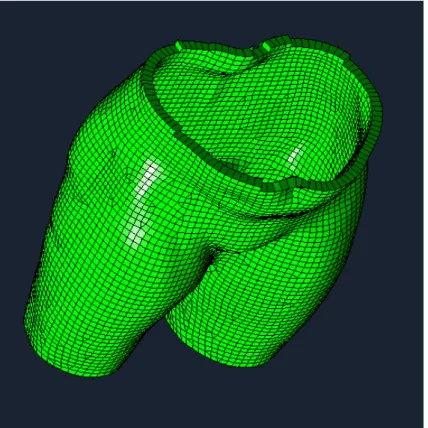
Si è costruito, allora un modello più fitto partendo da una dimensione degli elementi piani pari a 10 mm, la metà del caso precedente; si è ottenuto un modello solido costituito da 100.000 elementi (Fig.6.18).
Fig. 6. 18: modello costituito da 100.000 elementi
Un modello così fitto se sottoposto ad analisi non lineare può impiegare qualche settimana per completare le operazioni di calcolo; si è quindi voluto stimare l’andamento del tempo di calcolo in funzione del numero di elementi per un modello iperelastico in regime di grandi deformazioni.
A tale scopo si è studiato il comportamento di un modello molto semplice costituito da una trave a mensola caricata in punta (Fig.6.19);
Dati modello semplificato:
Lunghezza trave: 200 mm Sezione: 20*20 mm2
Condizioni al contorno: i nodi appartenenti alla sezione d’estremità Z=0 (con asse Z asse della trave) sono stati incastrati mentre quelli appartenenti alla sezione Z=200 (altra estremità) sono stati sottoposti ad uno spostamento di 40 mm in direzione y (Fig.6.19).
Fig. 6. 19: modello per la stima del tempo di calcolo
Proprietà del materiale: si è utilizza un modello iperelastico di Mooney-Rivlin utilizzando i valori proposti da Meier [5] sopra riportati.
Tipo di elemento: SOLID 185 che è un tetraedro a 10 nodi che supporta formulazione iperelastica in regime di grandi deformazioni.
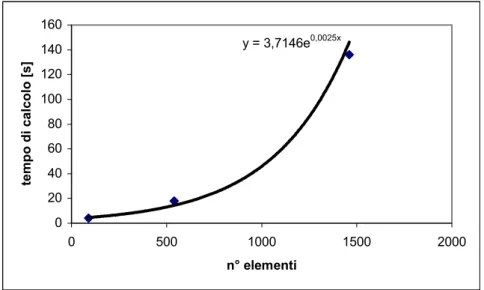
Con queste caratteristiche si sono sviluppati tre modelli (Fig.6.20), diversi tra loro per il numero degli elementi che compongono la mesh e si sono valutati i rispettivi tempi di calcolo:
1) n° elementi: 89; tempo di calcolo: 4 sec. 2) n°elementi: 539; tempo di calcolo: 18 sec. 3) n°elementi 1461; tempo di calcolo: 136 sec.
Primo modello: 89 elementi Secondo modello: 539 elementi
Terzo modello: 1461 elementi
Fig. 6. 20: modelli per ricavare relazione tra il tempo di calcolo e il numero di elementi
Si riporta di seguito un grafico che mostra la relazione tra numero di elementi e tempo di calcolo per il modello in esame (Fig. 6.21).
y = 3,7146e0,0025x 0 20 40 60 80 100 120 140 160 0 500 1000 1500 2000 n° elementi tem po di calcolo [s]
Come si nota, la linea di tendenza è esponenziale e il modello costituito da 100.000 elementi si aggirerebbe su tempi di calcolo proporzionali a exp(250).
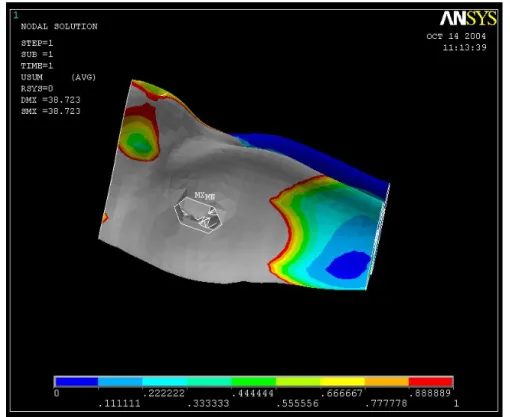
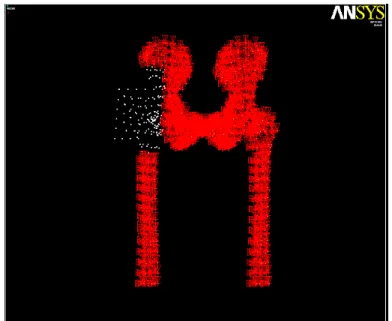
Visto che il tempo stimato è enorme, si è valutata la regione influenzata dalla presenza dell’incisione sfruttando i risultati ottenuti dall’analisi sulla pelle; riprendendo il modello completo della pelle (Fig.6.22) e confrontando l’andamento di USUM [mm] (somma di tutti gli spostamenti) valutato per un materiale elastico (Fig.6.23) e per uno iperelastico descritto dal modello di Mooney-Rivlin a 3 parametri (Fig.6.24) si osserva che la regione influenzata dalla discontinuità è identica.
Fig. 6. 23: andamento USUM [mm] per la pelle considerata materiale elastico
Questo risultato ha permesso di utilizzare il modello completo del muscolo considerato come un materiale elastico (tempi di calcolo inferiori ai 15’) per valutare la zona influenzata dalla discontinuità (in Fig.6.25 è riportato l’andamento di USUM [mm] per il muscolo).
Fig. 6. 25: in grigio è rappresentata la regione caratterizzata da USUM >1 mm
Possiamo assumere quale regione d’interesse quella rappresentata in grigio in Fig.6.25 per la quale il valore di USUM è maggiore di 1 mm.
6.3 Modello ridotto
Materiali e metodi
Si è sviluppato un modello tridimensionale ridotto comprendente soltanto la regione appena definita; analogamente a quanto fatto per la pelle, in questo secondo modello si è ricavato un taglio di spessore nullo andando a sezionare il volume compreso tra la pelle e le ossa con un piano parallelo al taglio e ottenendo così due volumi da meshare separatamente (Fig.6.26); tutti i nodi appartenenti alla superficie comune ai due volumi sono stati uniti (merge nodes) ad eccezione di quelli disposti sulle superfici del taglio (Fig.6.27). Nelle immagini successive (Fig.6.28e Fig.6.29) sono rappresentate rispettivamente la mesh solida e una sezione per visualizzare la disposizione degli elementi all’interno.
Fig. 6. 27: nodi da unire
Fig. 6. 29: disposizione degli elementi all’interno
Condizioni al contorno
Nel passaggio da HyperMesh ad ANSYS è stata importata, oltre alla mesh tridimensionale costituita da elementi SOLID 187, la mesh piana costruita sul contorno interno del dominio (rappresentato dal bacino e femore) e descritta mediante elementi PLANE 35 (Fig.6.30).
Una volta selezionati i nodi attaccati agli elementi PLANE 35 (che appartengono anche agli elementi SOLID 187), si sono incastrati tutti ad eccezione di quelli appartenenti alla zona del taglio (Fig.6.31); questa condizione riflette la perfetta adesione muscolo-ossa.
Fig. 6. 31: condizione di adesione perfetta muscolo ossa
Per applicare gli spostamenti imposti che simulino l’azione del retrattore è stato conveniente definire un sistema di riferimento locale con piano XY corrispondente al piano del taglio, asse Z ortogonale a questo e origine mostrata in alto a sinistra di Fig.6.32.
Come detto in precedenza la mesh solida è costituita da due volumi separati che hanno in comune una superficie; questo fatto rende particolarmente semplice selezionare prima i nodi da spostare in un verso e successivamente quelli da spostare nel verso opposto.
Il valore assoluto dello spostamento è di 37 mm in direzione Z considerando come sistema di riferimento quello LOCALE appena definito.
Per il volume appartenente al semipiano delle Z negative, si sono selezionati i nodi con queste caratteristiche:
X=161-201; Y=0-100;
Z=0;
La selezione dei nodi appartenenti al volume che si trova nel semipiano positivo è identica; l’unica differenza è nel segno dello spostamento imposto.
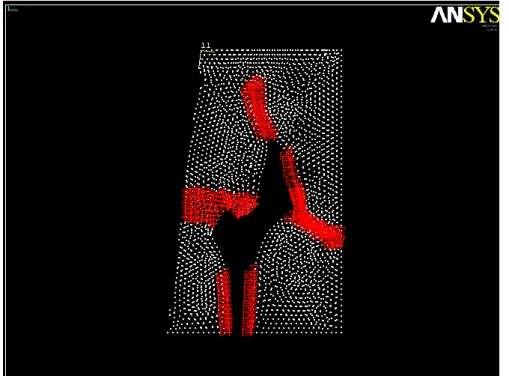
In Fig.6.32 è riportata un’immagine che rappresenta la posizione dei vincoli sul piano del taglio (Z=0); si notano i vincoli corrispondenti all’azione del retrattore.
Fig. 6. 32: azione del retrattore
Proprietà materiale
Sono stati considerati due casi distinti:
• volume completamente riempito da tessuto muscolare modellato come materiale iperelastico secondo i parametri forniti da [5] (Fig.6.33);
• volume interamente occupato da un tessuto assimilabile alla pelle modellata come materiale iperelastico secondo i parametri forniti da [1] (Fig.6.34).
I valori riportati sotto sono tutti in MPa ad eccezione di d che è un parametro adimensionale già definito in questo capitolo.
Fig. 6. 33: modello di Mooney a 9 parametri per il muscolo
Risultati
Sia per un modello che per l’altro si è costruita la curva R-S (Fig.6.35 e 6.36) che descrive la reazione del tessuto (R) al variare dello spostamento imposto (S).
Lo spostamento massimo considerato è stato pari a 25 mm dal momento che, per valori superiori i modelli non convergevano a causa di un’eccessiva distorsione degli elementi.
Curva R-S muscolo 0 20000 40000 60000 80000 100000 120000 0 5 10 15 20 25 30 S [mm] R[N]
Fig. 6. 35: curva R-S considerando il volume riempito di tessuto muscolare
Curva R-S pelle 0 50 100 150 200 250 0 5 10 15 20 25 30 S [mm] R[N]
Nel calcolo della risultante R si sono considerate soltanto le reazioni in direzione Y (direzione dello spostamento imposto) e tra queste soltanto quelle positive (si oppongono allo spostamento).
Inoltre, si è fatto riferimento ai nodi sottoposti allo spostamento nel verso positivo dell’asse Z. La curva di Fig.6.35 è relativa ai muscoli e quella di Fig.6.36 alla pelle; come si nota la reazione sviluppata dalla pelle è estremamente inferiore rispetto a quella del muscolo di ben tre ordini di grandezza.
Una differenza così marcata tra muscolo e pelle può avere significato fisico ma, il valore della forza sviluppata (100000 N) è lontano dalla realtà fisica.
Questo risultato mostra un’evidente inadeguatezza dei parametri d’ingresso (coefficienti di Mooney-Rivlin [5]) e apre di nuovo il problema della ricerca delle proprietà del materiale che verrà analizzato nel paragrafo 6.4.
Conclusioni
È stato sviluppato un modello agli elementi finiti della regione compresa tra i condili e il bacino considerando il volume delimitato internamente dalle ossa e esternamente dalla pelle, completamente riempito da tessuto molle.
Lo studio di questo modello ha messo in luce l’influenza delle non linearità costitutive sui tempi di calcolo a parità di numero di elementi.
E’ stato costruito anche un modello tridimensionale della sola regione influenzata dalla retrazione (ridotto); inserendo i nove parametri del modello di Mooney-Rivlin per il muscolo ricavati dalla letteratura [5] si sono ottenuti valori della reazione del tessuto intorno ai 100000 N mostrando un’inadeguatezza dei parametri d’ingresso.
Lo stesso studio effettuato inserendo i valori forniti per la pelle descritta dal modello di Mooney-Rivlin a 3 parametri [1] fornisce una reazione di 210 N in corrispondenza di uno spostamento imposto di 25 mm.
Si tratta, in entrambi i casi di modelli macroscopici sviluppati per analizzare le implicazioni delle grandi deformazioni e delle non linearità dei materiali in termini di distorsione degli elementi e convergenza dei modelli.
La distorsione degli elementi è tanto più piccola quanto più bassa è la loro dimensione ; per avere mesh ben condizionate, si è costretti ad aumentare il numero di elementi e quindi il tempo di calcolo, parametro estremamente critico nei modelli non lineari.
6.4 Il rectus femoris
Introduzione
Come già discusso nel capitolo 2 la posizione del taglio nell’operazione di protesi d’anca dipende dal tipo di approccio utilizzato; fino ad ora era stato considerato l’approccio laterale, mentre, in questa sezione sarà analizzato l’approccio antero–laterale (Fig.6.37).
Fig. 6. 37: approccio anterolaterale: posizione dell’incisione della pelle A) e B);
na volta recisa la cute e la sottocute il muscolo più importante da spostare per aprire U
l’accesso chirurgico è il rectus femoris; è un muscolo monoarticolare che si inserisce da un lato sul bacino dall’altro sulla rotula (Fig.6.38).
Fig. 6. 38: rectus femoris e inserimento dei tendini su bacino e rotula: a sx è riportata una vista laterale mentre a dx una vista frontale.
In questo studio è stato affrontato anche il problema della modellazione dei tendini fin qui trascurato visto che il muscolo era stato considerato un volume omogeneo e quindi analizzato in termini di modelli macroscopici.
Lo scopo di questo lavoro è stato quello di ricavare la relazione che intercorre tra lo spostamento del muscolo e la reazione sviluppata da questo.
Materiali e metodi
La prima fase è costituita dalla ricostruzione geometrica del muscolo e dei due tendini; si sono estratte le superfici corrispondenti dal software Datamanager in formato STL (Fig.6.39, Fig.6.40, Fig.6.41).
Come si nota, rispetto ai modelli precedenti vi è una maggiore complessità topologica; è stata pertanto necessaria un’opera di semplificazione in particolare del tendine prossimale (Fig.6.41) che presentava numerose irregolarità, per poter costruire la mesh.
All’interno del software Geomagic si sono eliminate le brusche variazioni della geometria e sono state costruite le patches sia per i due tendini che per il muscolo curandone con particolare attenzione la regolarità.
Le superfici così modellate sono state esportate in formato IGES .
Estratte e modellate le superfici è stato costruito il volume delimitato da queste: si sono importate le superfici salvate come IGES all’interno del programma CAD Unigraphics NX 2; dapprima si sono costruiti singolarmente i volumi corrispondenti alle tre superfici (tendine prossimale, muscolo, tendine distale) e successivamente si è ottenuto un volume unico come somma booleana tra i singoli volumi. In realtà è stata necessaria un’operazione intermedia: le superfici dei tendini, così come erano posizionate, appoggiavano su quella del muscolo; questa condizione limite impediva al software di effettuare l’operazione di unione. Per ovviare a questo inconveniente si sono spostati leggermente (spostamenti dell’ordine del mm) i volumi dei due tendini in modo da avere compenetrazione tra le superfici.
Osservando il volume risultante si possono distinguere tre zone: • zona costituita esclusivamente da tendine;
• zona costituita esclusivamente da muscolo;
• zona composta sia da muscolo che da tendine; questa zona prende il nome di aponeurosi. Per poter applicare le diverse caratteristiche del materiale alle varie parti si è diviso il volume ottenuto in cinque zone corrispondenti rispettivamente ai due tendini, alle due aponeurosi e al muscolo; l’operazione è stata effettuata sempre su Unigraphics NX 2 utilizzando la funzione “SPLIT” che divide un volume attraverso dei piani definiti dall’utilizzatore.
Successivamente i cinque volumi costruiti sono stati importati all’interno di HyperMesh per realizzare la mesh; mediante la funzione GEOM CLEAN UP si sono modificate, dove necessario le patches per facilitare la costruzione degli elementi (Fig.6.42).
Fig. 6. 42: modifica delle patches
Le linee in blu sono contorni delle patches che si vogliono escludere; questa operazione si effettua con il comande TOGGLE LINE all’interno della funzione GEOM CLEAN UP ed ha lo scopo di regolarizzare più possibile la forma delle patches.
Si è costruita una mesh triangolare piana del contorno e poi, partendo da questa una mesh tetraedrica con la tecnica dell’advancing front nella quale la costruzione degli elementi solidi parte dai contorni ed avanza verso il centro procedendo per strati (Fig.6.43 e Fig.6.44);
Fig. 6. 44: disposizione interna degli elementi solidi
In figura 6.44 è apprezzabile anche l’avanzamento a strati solidi della mesh tipico dell’algoritmo dell’advancing front.
Avendo la necessità di lavorare con elementi quadratici (funzioni di forma che legano valori all’interno dell’elemento con quelli nodali quadratiche), dal momento che i materiali hanno comportamento iperelastico è stato necessario cambiare l’ordine dei tetraedri costruiti mediante il comando ORDER CHANGE. Gli elementi risultanti sono così dei tetraedri a 10 nodi che possono essere portati in ANSYS come SOLID 187.
Condizioni al contorno
Osservando la posizione del muscolo relativamente alla testa del femore si nota che il retrattore agirà nella zona prossima al tendine superiore più precisamente nella sua aponeurosi prossimale (Fig.6.45); si sono quindi selezionati i nodi esterni e tra questi si sono considerati quelli con le seguenti caratteristiche: Z=1874÷1914; X=0÷169. Ai nodi selezionati è stato imposto uno spostamento di 40 mm in direzione X (ortogonale al piano di Fig.6.45).
Osservando la posizione del muscolo rispetto alla testa del femore si è ritenuto che uno spostamento di 40 mm fosse sufficiente ad aprire l’accesso chirurgico in quanto paragonabile a quello che si è ottenuto in fase di retrazione della pelle che è il vincolo per la retrazione massima del muscolo.
Fig. 6. 45: azione del retrattore
Nella selezione dei nodi si è implicitamente fatto riferimento al retrattore rappresentato in figura 6.46, lo stesso utilizzato nella modellazione macroscopica del muscolo.
Fig. 6. 46: schema del retrattore usato
Per simulare la condizione di inserimento del tendine nell’osso si sono eseguite le seguenti operazioni: si sono selezionati tutti i nodi esterni e tra questi si sono scelti quelli con coordinata Z compresa tra 1834 e 1854 (tendine prossimale) e quelli con Z compresa tra 2250 e 2290 (tendine distale); si sono bloccati tutti i gradi di libertà dei nodi selezionati rappresentando così l’inserimento dei tendini nelle ossa (Fig.6.47).
Infine, selezionati tutti i nodi esterni si è bloccata la traslazione in direzione Y (piano XY ortogonale al piano di Fig.6.47); questa condizione riflette il fatto che sia la pelle, posta tra il rectus femoris e l’esterno, sia i muscoli che si trovano al di sotto del rectus femoris garantiscono che gli spostamenti nodali avvengano solo lungo X (direzione di applicazione dello spostamento imposto).
Proprietà del materiale
Definite le condizioni al contorno si è passati alla fase di modellazione dei materiali; per il muscolo si è fatto riferimento al lavoro di Katake [6] che fornisce una curva sperimentale sforzo-deformazione (Fig.6.48) ricavata da una prova di trazione monoassiale per il muscolo sartorio umano. Da questa curva si è costruito un modello iperelastico scegliendo il tipo di formulazione (Ogden) e lasciando al software il calcolo dei coefficienti corrispondenti.
stress- strain muscolo
0 0,05 0,1 0,15 0,2 0,25 0,3 0,35 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 strain stress [MPa]
Fig. 6. 48: stress-strain di un muscolo sartorio
In figura 6.49 sono riportati i coefficienti del modello di Ogden del primo ordine per il muscolo e in figura 6.50 la curva stress-strain corrispondente ricavata dal fitting dei dati (stress in MPa).
Fig. 6. 49: coefficienti del modello di Ogden per il muscolo
Fig. 6. 50: curva stress-strain del muscolo ricavata con il modello di Ogden
Si è dovuto affrontare, per la prima volta in questo studio, anche il problema della modellazione dei tendini; dal punto di vista della caratterizzazione meccanica esistono lavori sul tendine d’Achille umano [7,8] che modellano il materiale mediante la seguente formulazione:
σ=E*εn
Con σ che rappresenta lo stress espresso in MPa, E il modulo di Young in MPa ed ε lo strain. Per i valori del modulo di Young E [MPa] esiste un’enorme differenza da uno studio all’altro; si passa dal valore di 5773 MPa proposto da Zajac [7] al valore di 27614 MPa proposto da Bobbert [8].
Per quanto riguarda il valore di n, Zajac [7] propone un modello lineare (n=1), mentre Bobbert [8] propone un modello parabolico (n=2).
Visto il disaccordo tra i lavori trovati in letteratura si è deciso di costruire un modello iperelastico basandosi sui valori della curva sforzo-deformazione ricavata da una prova di trazione monoassiale per un tendine d’Achille umano [6].
Di seguito sono riportati i valori relativi ad un modello di Ogden del primo ordine per il tendine e la curva stress-strain corrispondente con gli stress in MPa (Fig.6.51 e Fig.6.52).
Per la zona delle aponeurosi, caratterizzate dalla contemporanea presenza di tessuto muscolare e tendineo non esistono lavori che ne descrivano il comportamento meccanico; si è considerata questa zona una volta come muscolo ed una volta come tendine.
Ricordiamo che il tipo di elemento scelto per l’analisi è il SOLID 187 (tetraedro a 10 nodi) e che la formulazione iperelastica prevede che siano considerati gli effetti delle non linearità di tipo geometrico (NLGEOM,ON).
Definite le condizioni al contorno e le proprietà dei materiali è stato possibile identificare la mesh di convergenza. Si sono applicate le condizioni al contorno definite in precedenza e si è considerato, per semplicità che il volume fosse completamente riempito da muscolo (comprese le regioni tendinee). L’analisi è stata sviluppata con la formulazione mista U-P considerando la pressione costante all’interno dell’elemento (Fig.6.53).
Fig. 6. 53: opzioni dell’elemento SOLID 187: formulazione mista U/P
3275 elementi 4654 elementi
6577 elementi 9309 elementi
14778 elementi 27167 elementi
Fig. 6. 54: modello impiegati nello studio di convergenza
3275 elementi rappresenta il limite inferiore nel nostro set di modelli in quanto, aumentando la dimensione degli elementi, la distorsione causata dai grandi spostamenti e dalle non linearità impedisce al modello di convergere.
Come parametro di convergenza è stato scelto il valore risultante R delle reazioni dei nodi soggetti allo spostamento imposto che descrive l’azione del retrattore; sono necessarie alcune
• Sono state considerate solo le forze nella direzione X (direzione di applicazione dello spostamento imposto);
• Nel calcolo della risultante si sono sommate tutte e sole le reazioni con segno positivo (si oppongono allo spostamento imposto) escludendo così le forze che favorivano lo spostamento.
Si riporta di seguito il diagramma di convergenza che descrive l’andamento della reazione risultante R [N] in funzione del numero di elementi (Fig.6.55).
Analisi di convergenza 1,18 1,2 1,22 1,24 1,26 1,28 1,3 0 5000 10000 15000 20000 25000 30000 N° di elementi R[N]
Fig. 6. 55: analisi di convergenza
Possiamo assumere come mesh di convergenza quella rappresentata dal modello composto da 9309 elementi perché, a parità di valore a convergenza il peso computazionale è inferiore. Utilizzando la mesh di convergenza trovata e le condizioni al contorno sopra descritte si è analizzata l’influenza delle proprietà del materiale sul modello. Si sono analizzati, dapprima due casi semplici per capire le differenze macroscopiche tra il muscolo e il tendine considerando una volta il volume costituito interamente da muscolo ed una volta da tendine: • Valore della risultante R considerando il volume completamente riempito da tessuto
muscolare: 1,24 N; in figura 6.56 e 6.57 sono riportate rispettivamente la deformata e l’andamento di USUM [mm] (somma degli spostamenti nodali).
Fig. 6. 56: deformata considerando tutto tessuto muscolare
Fig. 6. 57: USUM [mm] considerando tutto tessuto muscolare
• Valore della risultante R considerando il volume completamente riempito da tessuto tendineo: 100000 N. In Fig.6.58 è riportata la deformata, mentre in Fig.6.59 è riportato l’andamento di USUM [mm] relativo allo spostamento imposto massimo.
Fig. 6. 58: deformata considerando tutto tessuto tendineo
Fig. 6. 59: USUM [mm] considerando tutto tessuto tendineo
Come descritto precedentemente il modello è stato diviso in cinque parti proprio per poter distinguere il muscolo dai tendini e dalle aponeurosi; la zona centrale (colore arancio Fig.6.60) è costituita esclusivamente da tessuto muscolare, quelle d’estremità (verde e celeste Fig.6.60) sono costituite da tessuto tendineo, mentre le restanti sono le aponeurosi caratterizzate dalla contemporanea presenza di un tessuto e dell’altro: queste sono state modellate prima come tessuto muscolare e poi come tessuto tendineo.
Fig. 6. 60: divisione in cinque zone del modello del muscolo
• Aponeurosi considerate come tessuto muscolare: Il valore della risultante delle reazione nodali è pari a 28 N superiore al valore ottenuto considerando tutto il volume costituito da muscolo. Infatti, il retrattore agisce nella zona dell’aponeurosi prossimale che, essendo assimilata a tessuto muscolare, è in grado di sopportare grandi deformazioni (con basse sollecitazioni) escludendo, in parte l’intervento della rigidezza del tendine. In Fig.6.61 è rappresentata la deformata, mentre, in Fig.6.62 è riportato l’andamento di USUM [mm].
Fig. 6. 62: USUM [mm] considerando le aponeurosi come muscolo
• Aponeurosi considerata come tendine: La reazione risultante R è, in questo caso molto più elevata: intorno ai 100000 N. In pratica interviene soltanto la rigidezza del tendine poiché la zona che separa i nodi con spostamento imposto da quelli vincolati sul bacino è esclusivamente composta da materiale tendineo (Fig.6.63). Nelle figure 6.64e 6.65 sono riportate rispettivamente la deformata e l’andamento di USUM [mm].
stress-strain tendine 0 10 20 30 40 50 60 70 0 0,02 0,04 0,06 0,08 0,1 strain stress [MPa]
Fig. 6. 64: deformata considerando le aponeurosi come tendine
Fig. 6. 65: deformata considerando le aponeurosi come tendine
Appare evidente che la caratterizzazione meccanica delle aponeurosi gioca un ruolo fondamentale nella stima delle reazioni nodali.
Osservando la zona delle aponeurosi è possibile distinguere in modo abbastanza preciso il tessuto muscolare da quello tendineo; dividendo gli elementi appartenenti al muscolo da quelli appartenenti al tendine (Fig.6.66 e Fig.6.67) e assegnando a questi le corrispondenti proprietà meccaniche si è ottenuto un modello più realistico delle aponeurosi.
Fig. 6. 66: tendine prossimale comprensivo anche della zona appartenente all’aponeurosi
Fig. 6. 67: tendine distale comprensivo anche della zona appartenente all’aponeurosi distale
Fig. 6. 68: deformata relativa allo spostamento massimo (40mm)
Il valore di R [N] calcolato con questa modellazione in corrispondenza di uno spostamento di 40 mm è pari a 195 N.
Risultati
Il modello appena sviluppato è stato utilizzato per ricavare la curva R-S che lega la risultante delle reazioni dei nodi spostati dal retrattore (R) allo spostamento imposto (S).
Visto che i tempi di calcolo erano abbastanza alti (tempi massimi intorno alle 8 ore con un processore Pentium 4 2.4 GHz e 512 MB di RAM) si è costruita la curva R-S facendo una simulazione per ogni incremento di 5 mm dello spostamento imposto.
Si riportano di seguito le deformate relative alle simulazioni effettuate per costruire la curva R-S (Fig.6.69). Come si nota la deformata relativa allo spostamento massimo risulta nettamente diversa da quelle ottenute nei casi precedenti a testimonianza che le aponeurosi, sotto le condizioni di carico descritte giocano un ruolo fondamentale.
spostamento imposto: 5 mm spostamento imposto: 10 mm
spostamento imposto: 25 mm spostamento imposto: 30 mm
spostamento imposto: 35 mm spostamento imposto: 40 mm
Fig. 6. 69: deformate relative a spostamenti imposti con incremento di 5mm
In figura 6.70 è riportata la curva R-S; per quanto riguarda il calcolo della risultante delle reazioni nodali R [N] valgono le considerazione fatte precedentemente.
R-S Rectus Femoris 0 50 100 150 200 250 0 10 20 30 40 5 S [mm] R [N] 0
Si nota che la curva R-S di Fig.6.70 ha un andamento tipico dei materiali iperelastici caratterizzati da rigidezza relativamente bassa nel campo dei piccoli spostamenti e molto più elevata nel campo dei grandi spostamenti.
La curva presenta un valore massimo pari a 195 N in corrispondenza di uno spostamento imposto di 40 mm.
Conclusioni
Analizzando il complesso muscolo-tendine si osserva un’enorme diversità in termini di proprietà meccaniche dei materiali che lo costituiscono; da un lato il tessuto muscolare, considerato passivo, in grado di deformarsi fino al 80-90% della sua lunghezza iniziale offrendo una bassissima resistenza, dall’altro il tendine materiale estremamente rigido tanto da avere una deformazione a rottura intorno al 10% della lunghezza iniziale; si deduce che è proprio il tendine ad offrire rigidezza all’intero complesso.
Un altro aspetto fondamentale, come mostrato è la modellazione delle aponeurosi; la resistenza ottenuta considerando le aponeurosi tessuto muscolare o tendineo varia di ben 4 ordini di grandezza.
Il modello sviluppato in ultima analisi rappresenta un tentativo di caratterizzare in modo più preciso il comportamento di questa zona di transizione anche se sarebbero necessari dati sperimentali al momento non reperibili.
La caratterizzazione meccanica dei materiali rappresenta, infatti un punto estremamente critico nella modellazione FEM dei tessuti molli; per quanto riguarda le caratteristiche meccaniche del muscolo e dei tendini si è fatto riferimento a prove di trazione monoassiale e quindi, implicitamente si è assunto di lavorare con mezzi isotropi.
Per capire quanto può essere spinta un’approssimazione del genere sono necessarie alcune osservazioni.
Il comportamento anisotropo di un tessuto muscolare è prevalentemente attribuibile alla componente attiva che sviluppa forza soltanto lungo la direzione delle fibre [2]; dal momento che, in questo studio consideriamo solo la componente passiva, tale ipotesi può non essere così restrittiva.
Il comportamento del tendine è spiccatamente anisotropo mostrando rigidezza massima quando viene tirato lungo il suo asse; di conseguenza le forze valutate potrebbero essere sovrastimate.
Un altro aspetto critico dell’analisi sviluppata è quello del condizionamento della mesh sottoposta a grandi deformazioni, problema ancor più sentito dal momento che il tessuto muscolare è estremamente elastico; infatti, per valori dello spostamento imposto superiori a 10 mm gli elementi cominciano ad essere distorti come testimoniato dai warning lanciati da ANSYS 8.0.
Fig. 6. 71: parametri di controllo del condizionamento della mesh
Osservando, però, la curva R-S (Fig.6.70) si nota che la distorsione suddetta non influenza l’andamento.
Per quanto riguarda l’implementazione delle caratteristiche iperelastiche va segnalata una forte sensibilità del modello rispetto al tipo di formulazione utilizzata; fittando i dati sperimentali [6] con la formulazione di Mooney-Rivlin non si è avuta convergenza come invece è accaduto con le formulazioni di Ogden.
Riferimenti
[1] HENDRIKS F.M. et al. (2003). A numerical –experimental method to characterize the non linear mechanical behaviour of human skin. Skin Research and Technology; 9: 274-283. [2] JOHANSSON T. et al. (2000). A Finite-Element Model for Mechanical Analysis of Skeletal Muscles. J. Theor. Biol. 206, 131-149.
[3] BATHE K.J. (1996). Finite Element Procedures. Englewood Cliffs, NJ: Prentice-Hall. [4] SUSSMANN T., BATHE K.J. (1987). A finite element formulation for non linear incompressible elastic and inelastic analysis. Comp. Struct. 26, 357-409.
[5] MEIER P., BLICKHAN R. (2000). FEM-Simulation of skeletal muscle: The influence of inertia During Activation and Deactivation. Institute of Sport Science, Friedrich-Schiller-University, Jena, Germania.
[6] VALENTA J. (1993). Biomechanics. Elsevier Publishing Company. pp.134-142.
[7] ZAJAC F. (1989). Muscle and tendon: Properties, models, scaling and application to biomechanics and motor control. Crit Rev Biomed Eng; 17: 359-411.
[8] BOBBERT M. F. & alt. (1986). A model of the human triceps surae muscle\320tendon complex applied to jumping. Journal of Biomechanics; 19: 887.
![Fig. 6. 23: andamento USUM [mm] per la pelle considerata materiale elastico](https://thumb-eu.123doks.com/thumbv2/123dokorg/5643061.69830/19.892.224.714.78.485/fig-andamento-usum-per-pelle-considerata-materiale-elastico.webp)