Capitolo I
Sistemi meccatronici per la
chirurgia
1.1. Sistemi di telemanipolazione
Ogni sistema chirurgico, robotico e teleoperativo, porta con sé determinate caratteristiche, intrinseche alle sue necessità di funzionamento. Non solo, infatti, appaiono evidenti le caratteristiche salienti, come la capacità di teleoperare e, quindi, poter eseguire interventi chirurgici senza la necessaria presenza simultanea nella stessa sala del chirurgo e del paziente o come la possibilità di ridurre al minimo l’invasività dell’operazione alimentando così il filone della “chirurgia pulita”, ma anche la possibilità di minimizzare il tremore fisiologico del chirurgo grazie all’utilizzo combinato di computer e bracci robotici.
Anche i sistemi teleoperativi, tra cui il “Da Vinci” (vedi Fig. 1-1) e lo “Zeus”, rientrano a pieno diritto nella ricerca dello stato dell’arte di uno strumento come il bisturi meccatronico che, vice versa, vuole mantenere le capacità umane del chirurgo ben connesse a quelle tecnologiche superiori del prototipo.
1.1.1. Sistema Da Vinci
Il Sistema Chirurgico da Vinci, prodotto dalla società californiana Intuitive Surgical Inc. , è destinato al controllo di strumenti endoscopici durante procedure chirurgiche di toracoscopia e laparoscopia ed è composto da una “Console Chirurgo”, con integrato visore stereo 3D, un “Carrello Chirurgico”, con un “Braccio Camera” e due “Bracci Strumento” e, infine, un “Carrello Vision”.
Figura 1 - 1: Il sistema chirurgico Da Vinci.
L’unità chirurgica possiede tre bracci (vedi Fig. 1-2), di cui quello centrale è adibito ad uso endoscopico tridimensionale, mentre gli altri due, affiancati, sono utilizzati, ad esempio, come delle pinze, forbici, elettrocauterizzatori, ecc.
Il movimento degli strumenti è comandato da un servomeccanismo di precisione, che si basa sul principio costruttivo dell’architettura seriale di “joints”, “links” ed un “remote center”8. I due utensili e l'endoscopio saranno disposti in modo tale che attraversino il corpo del paziente proprio in prossimità del punto fisso di rotazione; in questo modo sono minimizzate le forze laterali sulla parete corporea.
Figura 1 - 2: Bracci del Sistema Da Vinci.
Ogni manipolatore chirurgico è dotato di tre gradi di libertà9: beccheggio, imbardata ed inserimento10 ed è provvisto di un giunto smontabile per il cambio dell'end-effector.
Questi strumenti hanno altri tre g.d.l. che rappresentano la spalla di ogni manipolatore che permette alla punta dello strumento di articolarsi in tutti i sensi11. Questa tecnologia fornisce un totale di sei g.d.l., più l'attuazione dell' “end-effector”12 alla punta dello strumento. Di conseguenza, il braccio robot può simulare il movimento naturale di un braccio umano.
L'endoscopio è posizionato al centro rispetto ai due bracci operativi e monta una videocamera 3D Olympus da 10 mm, può essere movimentato mediante 4 g.d.l. ed è progettato in modo da avere un punto fisso di rotazione del tutto simile all'utensile dei bracci chirurgici. Un sistema di “feedback” restituisce al master la stessa forza tra che si scambiano nel contatto lo slave con i tessuti interni del corpo del paziente. Il calcolatore registra i movimenti del braccio del chirurgo e ricostruisce i movimenti del braccio robot e degli strumenti fissati ad esso, con possibilità di scalare via software i movimenti del chirurgo. La scala di movimentazione può essere scelta in un vasto range, da 1:1 a 10:1, il sistema usa 3 scale di “presetting”, 2:1, 3:1 e 5:1. Inoltre lo stesso software ha come caratteristica, quella di poter filtrare il tremore per valori di frequenza superiori a 6 Hz. 1.1.2. Sistema Zeus
E’ un sistema del tutto analogo al Sistema da Vinci, fabbricato dalla californiana Computer Motion Inc. Si basa sul medesimo principio di funzionamento, ma rispetto al sistema precedente, lo Zeus può essere dotato di un braccio robotico a comando vocale, l’Aesop,
9 Abbreviato “g.d.l.”.
10 In inglese “pitch”, “yaw” e “insertion”. 11 Cinematica del centro fisso di rotazione. 12 Ad esempio un “grip”.
che movimenta il braccio endoscopico durante la procedura mediante i comandi vocali direttamente provenienti dal chirurgo. Naturalmente, alla facilità di utilizzo fa da controparte la necessità di addestrare il software alla voce dell’utente, in modo da ridurre al minimo le possibilità di cattive interpretazioni vocali.
Il robot chirurgo Zeus (vedi Fig. 1-3) è un nome già molto conosciuto nell'ambito della telemedicina ed ora, dopo aver già operato, con successo, adulti e bambini, in Italia e non solo, potrà anche intervenire per correggere alcune malformazioni del feto, a partire da quelle cardiache.
L'annuncio è stato dato a Genova, nel corso del Congresso Mondiale di Urologia, da uno degli inventori di Zeus: il professor Scott Hammond. Per poter intervenire sui neonati che si trovano ancora nella pancia della mamma, sarà sviluppata un'apposita versione del robot ancora più evoluta di quella, già sofisticatissima, che nei mesi scorsi ha operato gli organi, come cuore, reni, fegato e polmoni, di pazienti grandi e piccoli. Zeus chirurgo prenatale costerà circa un milione di euro. Zeus, nato a Santa Monica in California, è già utilizzato in Italia da cinque strutture specializzate.
Il primo intervento chirurgico di Zeus è stato eseguito lo scorso anno su una paziente ricoverata presso l’EITS (Istituto Europeo di Telechirurgia di Strasburgo), mentre il team di chirurghi si trovava a New York, vale a dire a quattromila chilometri di distanza.
1.1.3. Osservazioni critiche
I sistemi teleoperativi robotici appena descritti hanno introdotto importanti benefici per il paziente poiché permettono l’implementazione di procedure invasive minime.
Possono essere effettuate operazioni chirurgiche senza eccessive aperture13 in modo da renderle meno dolorose per il paziente, con minori danni estetici e con un accelerato recupero postoperatorio. Queste tecnologie hanno così contribuito a determinare un sostanziale progresso nell'arte e nella scienza della chirurgia.
Tuttavia, ci sono alcuni svantaggi nell'ambulatorio endoscopico rispetto alle tecniche convenzionali. L'applicazione del robot spesso è integrata male nelle procedure di funzionamento e nei metodi del lavoro del chirurgo. L'utilizzo del robot da parte del medico, rispetto alle pratiche tradizionali, è spesso occasionale14 e il chirurgo spesso fatica ad adattarsi a questa tecnica; si necessita, inoltre, di un opportuno e spesso lungo addestramento prima di utilizzare il sistema teleoperativo. L'uso dei dati di immagine, prima dell’avvento di questi sistemi, era limitato all'orientamento approssimativo prima dell'intervento vero e proprio. Un uso in fase operatoria è spesso difficile e meno intuitivo. Data la loro architettura tali sistemi sono, inoltre, poco versatili, molto costosi, sia per quanto riguarda l'apparecchiatura15, che i costi di intervento; ad esempio, in Italia un intervento con il sistema da Vinci costa 3500 euro in più rispetto all'intervento tradizionale, ed è interamente a carico del paziente16.
Inoltre, rimanendo focalizzati sul target di questo studio, occorre considerare che la spesa, l'addestramento e tutti i problemi che sono correlati all'utilizzo dei sistemi teleoperativi non sono affatto giustificati se si mira alla compensazione del tremore come unico scopo di questi mezzi.
13 Laparotomia o toracotomia.
14 Eccetto in centri specializzati come l’EITS (Istituto europeo di Telechirurgia di Strasburgo). 15 Il Da Vinci ha un prezzo di mercato intorno ai 2.5 miliardi di lire.
16 Solo cliniche private al momento hanno acquistato queste apparecchiature, c'è ancora molta diffidenza a
1.2. Micron, strumento attivo per la cancellazione del tremore
Dal punto di vista del chirurgo, la microchirurgia diretta (vedi Fig. 1.4), o non teleoperativa, mantiene, in ogni caso, una sua importanza dovuta alla maggior naturalezza e al suo ritorno cognitivo superiore.
Figura 1 - 4: Simulazione di un intervento chirurgico attivo con Micron.
Nella microchirurgia manuale diretta, poiché è la mano del chirurgo ad attuare il sistema, l'esatta corrispondenza in tempo reale tra il movimento volontario della mano e il feedback visuale è garantita senza il ritardo, che talvolta i sistemi teleoperativi, invece, mostrano.
A differenza di questi ultimi, in cui l'eliminazione del tremore è affidato alla rigidezza del meccanismo e al filtraggio elettronico, nella chirurgia diretta abbiamo un controllo del tremore attivo, ossia si cerca con uno strumento di creare un movimento della punta operatrice, uguale ed opposto.
Il primo bisturi per la compensazione del tremore fisiologico da utilizzare in campo oftalmologico, e più precisamente per occlusioni vitroretinali effettuate in sclerotomia, è stato studiato ed è in questo momento in fase di sperimentazione da alcuni ricercatori statunitensi (Riviere et al., 2003; Riviere et al., 1998) ed è conosciuto con il nome di Micron (vedi Fig. 1-5).
Il punto di partenza è stato quello di costruire un bisturi di dimensioni simili a quelli di un analogo bisturi passivo e di peso minimizzato al fine di evitare affaticamento durante l'operazione. Un tipico strumento vitroretinale è lungo dai 7.5 cm ai 15 cm ed ha un
diametro compreso tra 1.0 e 1.5 cm, e ha un'asta intraoculare di 3 cm di lunghezza e 1 mm di diametro, all'apice della quale possono essere montati diversi “end-effector”17. Tale punta accede alla parte interna dell'occhio del paziente attraverso sclerotomia.
Per ottenere la compensazione dell'errore attivo, lo strumento dovrebbe rilevare il proprio movimento distinguendo quello desiderato da quello indesiderato18 in tempo reale e deviando la sua punta al fine di eliminare il movimento indesiderato. Lo strumento opera con una pulsazione maggiore a 12 Hz , in modo da poter cancellare il tremore fisiologico che nominalmente vale tra gli 8 ed i 12 Hz.
Lo strumento pesa 170 g, misura 210 mm di lunghezza e ha un diametro medio di 22 mm. Vicino alla punta, l’impugnatura è stata sagomata con criteri ergonomici per permettere una presa comoda e sicura.
Figura 1 - 5: Micron, strumento attivo realizzato dallo staff del Prof. C. Riviere presso la Carnegie Mellon
University.
Micron funziona ad anello aperto. I tre giroscopi ed i tre accelerometri on board, posti nella parte posteriore dell’impugnatura rilevano le traslazioni e le rotazioni in sei g.d.l. della punta dello strumento.
Il controllo provvede, poi, a digitalizzare il segnale19 proveniente dai sensori, in seguito a
filtrarlo, per poi integrare il segnale ripulito per ottenere spostamento e rotazione della punta.
17 Punte, testa laser.
18 Tremore.
In seguito, tramite un algoritmo adattivo capace di prevedere il tremore della mano20 è stimato l’errore del movimento, ottenendo così l’ingresso che, una volta trasformato in un segnale analogico, è utilizzato per la compensazione attuativa.
Il meccanismo di attuazione della punta operatrice è basato sull’architettura di un manipolatore parallelo a tre g.l. Tre giunti prismatici, montati in parallelo fra loro, collegano due piattaforme, una fissa ed una, invece, mobile. Ogni giunto prismatico è composto da sette attuatori piezoelettrici disposti in serie, ciascuno dei quali ha una variazione di lunghezza massima pari a 14.5 µm. L’intera serie genera una forza pari a 840 N ed è attuata con una tensione continua di 100 V.
In questo modo il suo campo lavorativo raggiunge i 560 µm lungo gli assi X e Y, mentre il massimo spostamento lungo l’asse longitudinale Z raggiunge solamente i 100 µm.
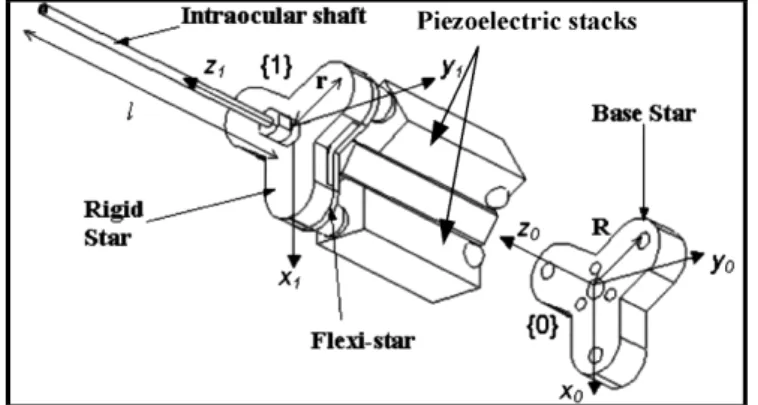
L’asta intraoculare di 30 mm, in acciaio inossidabile, è fissata al centro di una piattaforma rigida a forma di stella a tre punte (vedi Fig. 1-6); i loro apici formano un triangolo equilatero. Attaccata a questa stella vi è un’altra esattamente della stessa forma, flessibile (flexi-star), sulla quale sono in contatto gli apici delle tre gambe del manipolatore parallelo.
Figura 1 - 6: Componenti principali di Micron (Riviere et al., 1998).
La “flexi-star” è realizzata nel materiale termoplastico ABS 780 ed è fissata alla stella rigida mediante tre bulloni periferici, mentre con una vite centrale è fissata ad una colonna triangolare longitudinale, perpendicolare alla piattaforma rigida, che a sua volta è fissata ad una piattaforma fissa, detta “base-star”. La colonna e la piattaforma di base sono solidali con il corpo dello strumento, mentre la stella rigida e la stella flessibile, grazie appunto alla flessibilità di quest'ultima, si possono muovere rispetto al bisturi.
Gli attuatori sono posizionati lungo le tre facce della colonna triangolare, e sono interposti tra la stella fissa di base e il gruppo stella rigida- stella flessibile. Quando si applica una tensione agli attuatori, questi si estendono longitudinalmente e spingono contro la piattaforma di base e la piattaforma mobile facendo, in questo modo, muovere opportunamente l'asta intraoculare solidale ad essa. In corrispondenza dei punti di contatto tra piattaforma di base e gambe del manipolatore ci sono tre viti di calibrazione per compensare eventuali tolleranze.
Il sistema di manipolazione appena descritto, è inserito nell'impugnatura dello strumento, che a sua volta, in coda, ha interfacciato l'alloggiamento dei sensori per il test, è stato montato sulla punta dell'apparecchio un LED a infrarossi (vedi Fig. 1-7), e il suo movimento è monitorato mediante uno speciale tracciatore ottico per micromanipolatori.
Figura 1 - 7: Banco prova realizzato con un LED ad infrarossi e due telecamere.
Nei test preliminari, Micron è stato guidato lungo due traiettorie differenti:
• Movimento 2-D circolare nel piano x-y (vedi Fig. 1-8). L’obiettivo era una traiettoria circolare di 70 µm di raggio a una frequenza pari a 10.2 Hz.
• Movimento 1-D sinusoidale lungo l’asse z (vedi Fig. 1-9). L’obiettivo era una traiettoria sinusoidale di 80 µm picco-picco e pulsazione pari a 10.2 Hz.
Figura 1 - 8: Risultati delle prove con traiettoria circolare (di 70 µm di raggio) nel piano X-Y.
Nel primo test è stato riscontrato un errore RMSE pari a 2.5 µm, mentre nel secondo si è attestato a 11.2 µm.