35
Capitolo 3
Mock-up di braccio robotico e piattaforma robotica multi-purpose
Con il termine mock-up si indica un artefatto costruito ad hoc per validare un’ipotesi formulata su una specifica parte di un prototipo e che quindi, a differenza di quest’ultimo, non presenta tutte le parti costitutive previste nell’artefatto finale. Per studiare l’anatomia e i movimenti del muscular hydrostat, sono stati realizzati vari mock-up e una piattaforma per controllarne i movimenti. La piattaforma viene denominata “multi-purpose” visto che può essere utilizzata per vari scopi, per esempio per testare la dinamica di movimento di up di diversi materiali. In questo caso essa è stata adoperata per azionare due diversi mock-up dimostrativi in modo da poter confutare o confermare alcune teorie sui pattern di attivazione del braccio dell’Octopus vulgaris. In particolare uno dei mock-up è stato creato appositamente per testare la veridicità dell’ipotesi di propagazione della piega nel braccio del polpo durante il movimento di reaching. In particolare, è stato teorizzato che ciò sia ottenuto grazie a un’onda di stiffening causata da un pattern di attivazione muscolare simmetrica che si propaga lungo il braccio e spinge in avanti la piega formatasi. L’attivazione muscolare proposta richiede la co-contrazione dei tessuti muscolari longitudinali e trasversali che in questo caso funzionano come muscoli antagonisti. Lo stiffening, quindi, sarebbe il risultato di un’attivazione di ugual grandezza. Tale meccanismo di attuazione ha grandi attrattive in quanto non implica una complessa coordinazione spazio-temporale, semplificando il controllo. Tale ipotesi concorda con i risultati ottenuti da alcuni studi nei quali vengono misurati i segnali ElettroMioGrafici(EMG) nel braccio del polpo [19]. La similarità del tempo medio della forma d’onda dei segnali EMG relativi a diversi muscoli in vari esperimenti potrebbe discendere dal fatto che tutti i gruppi muscolari vengono attivati simultaneamente con un pattern simile. Ciò confermerebbe l’ipotesi dell’onda di stiffening. Ciò confermerebbe l’ipotesi dell’onda di stiffening. L’ideazione del mock-up a cavi longi-trasversali parte proprio da queste teorie e permette di tentarne la validazione.
36
3.1 Mock-up con quattro cavi longitudinali
I mock-up realizzati presentano tutti una forma conica che nelle dimensioni rispetta le proporzioni di un braccio di Octopus vulgaris. In questo caso la lunghezza totale del mock-up è di 32 cm di cui gli ultimi 9 cm puramente passivi (non soggetti all’azione dei cavi), il diametro massimo è, invece, di 2,5 cm. Il materiale utilizzato per il mock-up è un silicone commerciale (ECOFLEXTMsilicone 00-30-Smooth-On, Inc. USA). Il silicone scelto ha approssimativamente la densità di 1070 Kg/m3, che è approssimativamente la stessa densità del braccio dell’Octopus vulgaris, cioè 1042 Kg/m3 [20]. Questo primo mock-up è stato creato per simulare la sola azione dei muscoli longitudinali e presenta quindi 4 cavi disposti lungo l’asse maggiore del braccio che hanno la funzione di diminuire la lunghezza del braccio lungo tale asse. I quattro cavi longitudinali sono uniti e fissati alla parte distale del braccio e si allontanano radialmente via via che si avvicinano alla base del mock-up dove presentano una distanza di 0,75 cm dal centro. Per semplicità di termini, da qui in avanti ci si riferirà ad un ipotetico orientamento orizzontale del braccio in cui un cavo si troverà ad essere rivolto verso l’alto (rispetto al centro del braccio), uno verso il basso, uno verso destra e uno verso sinistra. Ogni cavo è avvolto da una guaina elastica che non conferisce rigidità alla struttura, ma evita l’insorgenza di forze di attrito altrimenti presenti per il diretto contatto con il materiale siliconico di cui è composto il braccio.
3.2 Mock-up con cavi longi-trasversali
Un altro tipo di mock-up attuato a cavi è stato realizzato per replicare uno dei movimenti stereotipati più importanti del polpo, il movimento di reaching. La struttura del mock-up illustrata in figura 3.1 è stata studiata appositamente per testare una delle teorie formulate sull’attivazione muscolare dell’Octopus vulgaris per produrre questo movimento. Tale teoria sostiene che il reaching sia ottenuto grazie al propagarsi per tutta la lunghezza del braccio (dalla base all’estremità) di un’onda di stiffening (irrigidimento) biologicamente
37
ottenuta con la contrazione simultanea e di ugual intensità dei muscoli trasversali e longitudinali agenti sulla stessa porzione di braccio [19]. Per replicare questo funzionamento è stata studiato e sviluppato un meccanismo specifico che permette di ottenere un effetto congiunto di contrazione in direzione longitudinale e trasversale causando un irrigidimento locale. Per questa ragione ci si riferirà a tali cavi con il nome “longi-trasversali”.
Questo mock-up attuato a cavi molto complesso è stato realizzato nei laboratori della Scuola Superiore Sant’Anna, tramite colata in uno stampo ad hoc.
Il mock-up contiene 40 cavi, di cui 4 puramente longitudinali ed i restanti 36 longi-trasversali, che quindi simulano contemporaneamente l’azione di longitudinali e longi-trasversali,
Fig. 3.1 schema del mock-up longi-trasversale, sono messi in evidenza gli elementi interni a setaccio per far passar i cavi
Fig. 3.2 struttura interna del mock-up. Le frecce rosse più grandi corrispondono alla collocazione degli elementi rigidi e quindi delle sezioni di strizione
38
divisi in 9 gruppi da 4 cavi ciascuno. Di fatto, per chiarezza, in questa versione vi sono i 4 cavi longitudinali presenti anche nella versione precedente del mock-up ed in più i cavi longi-trasversali necessari per produrre l’onda di irrigidimento. La disposizione e la funzionalità di tali cavi è illustrata in fig. 3.2 dove è altresì mostrato come anche questi cavi escono dalla base del mock-up e da lì vengono azionati esattamente come succede per i cavi longitudinali puri. Si è reso necessario per ottenere i cavi longi-trasversali inglobare nella matrice siliconica una serie di piccoli elementi rigidi, che assolvono il compito di scomporre la forza di trazione assiale, fornita dall’attivazione dei cavi alla base, nelle due componenti, assiale e radiale. Gli elementi rigidi hanno una struttura a setaccio che tiene separati i cavi e fa sì che i cavi deputati a far contrarre i gruppi di strizione più distali possano scorrere liberamente negli elementi più prossimali. Le estremità distali dei cavi longi-trasversali (4 per sezione) possono uscire dalla parete esterna in silicone ed agganciarvisi grazie a dei fermi che li ancorano localmente. Ogni gruppo (sezione) è posizionato ad intervalli regolari di 3 cm.
I 4 cavi di ogni gruppo di contrazione longi-trasversale vengono uniti in un unico nodo all’uscita della base del mock-up e collegati ad un unico cavo di servo motore. Quindi i 36 cavi longi-trasversali vengono di fatto attivati da 9 servomotori. Queste semplificazioni sono biologicamente accettabili e giustificabili dal fatto che il mock-up è stato specificamente realizzato per la riproduzione del solo movimento di reaching. In tale maniera si può simulare, infatti, solo la co-contrazione di due gruppi muscolari del polpo. La lunghezza totale del mock-up è di 62 cm di cui gli ultimi 16 cm puramente passivi (non soggetti all’azione dei cavi), il diametro massimo è, invece, di 3 cm. Anche in questo caso, tutti i cavi sono stati inseriti in guaine di silicone, per facilitarne lo scorrimento e diminuire l’attrito durante l’attivazione del mock-up. I longitudinali puri a 2/3 della lunghezza del braccio si congiungono e vengono attaccati ad un elemento rigido atto ad impedirne lo scorrimento.
Il tutto è saldamente attaccato ad una base rigida che permette al mock-up di essere collegato alla struttura portante. I cavi uscenti dalla base del mock-up si uniscono tramite un attacco anello-gancio ai cavi provenienti dai servo motori.
39
Il setup utilizzato per gli esperimenti comprende un acquario di dimensioni 55x79x31 cm (HxLxP) in vetro, una struttura meccanica portante, un mock-up, una hardware di controllo, 13 servomotori ed un personal computer con un software dedicato.
La scheda di controllo presenta 13 pin a cui sono connessi altrettanti servo motori da controllare come si vede in Fig. 3.3.
3.3 Servo motori
I servo motori sono costituiti da tre parti visibili in figura 3.4: un motore, un potenziometro (cioè una resistenza variabile) che è connesso all’albero motore e una parte di controllo. Il potenziometro permette al circuito di controllo di conoscere l’angolo attuale a cui si trova il
Fig. 3.3 Un cavo USB collega il computer con il microcontrollore che viene alimentato nel momento in cui il cavo USB viene attaccato al PC. Ogni servo motore è collegato da connettori con tre fili ad un pin della torretta di controllo
Fig. 3.4 componenti interne del servomotore
TITechSH2 (0) (1) HS-785HB μP SuperH-2 DI/O USB (12)
40
servo motore. Il motore, attraverso una serie d’ingranaggi, fa girare l’albero motore ed il potenziometro simultaneamente. Il segnale del potenziometro va all’interno del circuito di controllo del servo e fa girare il motore fino a quando il circuito di controllo rileva che la posizione è corretta.
I servo motori utilizzati (HS-785HB – Hitec RCD USA, Inc.) possono venir alimentati tra 4.8 V e 6 V. Nel caso specifico del setup sopra descritto i motori vengono sempre alimentati a 6 V per ottenere la massima velocità angolare a regime di 1.38 sec per 360° senza carico. Questo tipo di servo motore è in grado di compiere 3.5 giri.
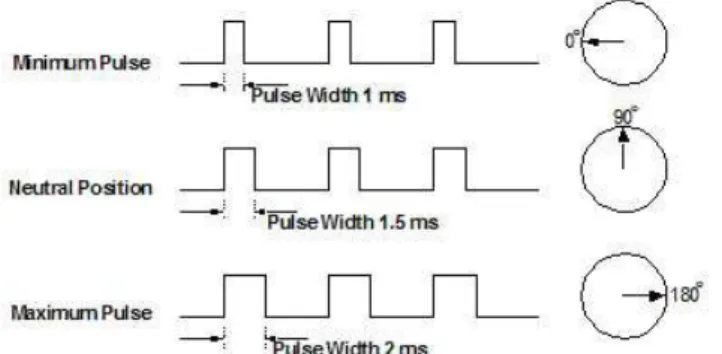
Tali motori vengono attivati attraverso un controllo PWM (Pulse Width Modulation). Il tempo in cui l’impulso inviato al servo motore rimane a livello alto, come illustrato in figura 3.5 è proporzionale all’ampiezza dell’angolo del quale girerà il servo motore. Se la
larghezza del segnale non cambia, la posizione rimane la stessa. Se una forza esterna tende a muovere il servo motore questo opporrà una forza resistente alla variazione di posizione. In questo particolare setup se a un servo motore viene dato un impulso che rimane al livello alto per 1900 microsecondi l’albero motore girerà fino al fondo corsa del motore. Se, invece, viene dato al servo motore un impulso che rimane a livello alto per 1100 microsecondi l’albero motore non si muoverà. Qualsiasi valore d’impulso d’ingresso compreso tra questi due valori darà una rotazione dell’albero motore intermedia tra lo zero del motore ed il fondo corsa. La larghezza dell’impulso d’ingresso in microsecondi è proporzionale all’angolo di cui gira l’albero motore.
Il periodo massimo dell’impulso d’ingresso al servo motore è di 20 ms (vedi figura 3.15). Se viene dato un nuovo comando al servo motore, infatti, questo può esser dato solo dopo 20ms che è stato inviato il primo impulso [19]. Il periodo massimo ci è utile per ricavare il duty cycle, un parametro molto importante nei servo motori. Il duty cycle è dato dal rapporto tra
41
la durata del segnale alto ed il periodo totale del segnale e serve a esprimere per quanta parte del periodo il segnale rimane a livello alto. Il livello alto nei servo motori corrisponde al periodo di attività. Il duty cycle, rispetto alla Fig. 3.15 è:
d = = 0.065 = 6.5 %
dove 1130 microsecondi è la porzione di periodo a livello alto e 20000 è il periodo totale. Il risultato del rapporto è sempre un numero compreso tra 0 e 1. Nel caso in cui si abbia un duty cycle di 0 o 1 si è in presenza di segnali continui. Se il duty cycle è 1 vuol dire che per tutto il periodo il segnale è alto, se è 0 vuol dire che il segnale è basso per tutto il periodo. Nel caso specifico del servo motore in questione se l’impulso d’ingresso è di 1100 microsecondi il duty cycle è di:
d = = 0.055 =5.5 % Se l’impulso d’ingresso è di 1900 microsecondi il duty cycle è di:
d = = 0.095 =9.5 %
I servo motori possono girare sia in senso orario che antiorario. Infatti, in un esempio fornito da un sito specializzato [21] si mostra che la posizione neutra (90°) del servo motore è ottenuta con un duty cycle di 7.5. Se il duty cycle è portato al 5% si andrà a 0° mentre la posizione che si raggiunge con un impulso corrispondente al duty cycle del 10% è di 180°. Il servo motore può girare in senso orario, per esempio da 90° a 0° sia in senso antiorario, cioè da 0° a 180° come illustrato in figura 3.6.
42
Nel servo motore HS-785HB non ancora utilizzato la posizione neutra si raggiunge con un impulso corrispondente ad un duty cycle di 7,5 % mentre nel set up usato in questa applicazione tale impostazione è stata modificata scrivendo direttamente nella memoria flash del microcontrollore che i motori di numero pari hanno come posizione di zero l’inizio corsa, codificata da un duty cycle del 5,5 %, mentre i motori di numero dispari hanno come posizione di zero il fine corsa del motore, corrispondente al duty cycle di 9,5 %. Tale modifica è stata apportata per far sì che metà dei motori potessero esser ribaltati come illustrato in Fig.3.7 per essere meno d’ingombro sulla piattaforma. E’ stato scelto di ribaltare la metà dei motori che sono identificati con numerazione dispari nel programma software e nell’ordine con cui i loro connettori vengono inseriti negli slot dell’hardware di controllo.
I motori sono resistenti all’acqua ed alla polvere e sono quindi particolarmente adatti a questa applicazione che li pone sopra un acquario.
Fig. 3.7 Due dei servo motori, uno ribaltato rispetto all’altro in modo che i due alberi motori si affaccino. Il motore di destra gira in senso orario, quello di sinistra in senso anti-orario. Il primo parte da inizio corsa ed il secondo da fine corsa
43
Il servo motore HS-785HB è analogico, e, diversamente da come avviene nei servo motori digitale, che vengono aggiornati più velocemente, il servo motore analogico riceve un segnale dall’amplificatore 30 volte al secondo o a 30 Hz. Tale segnale permette all’amplificatore di cambiare la posizione del motore. I servo motori digitali, invece, hanno un amplificatore ad una frequenza di dieci volte più ampia. Il motore analogico, quindi, ha una deadband maggiore, cioè di 8 microsecondi. Altre importanti specifiche del motore vengono indicate in tabella 3.1.
Tab. 3.1 Specifiche del tipo di servo motore utilizzato
Specifiche del servo motore momento torcente (a 6 Volt) 13.2 kgcm
stall current (massima corrente che può usare il motore) (a 6 Volt)
1800 mA
dimensioni 59 x 29 x 50mm
peso 110 g
ingranaggi in Karbonite (forza di 5 volte superiore agli ingranaggi di nylon)
44
3.4 Hardware di controllo
L’hardware di controllo è composta dal microcontrollore (TITechSH2 Tiny ControllerR -Hibot Corp. JAPAN), dal programmatore e dalle due serie di slot, una per i motori (a destra nella foto) ed una per i sensori (a sinistra) come illustrato in figura 3.8. Le specifiche generali del microcontrollore TITechSH2 Tiny Controller sono riportate in tabella 3.2.
Fig. 3.8 struttura della torretta di controllo. Microcontrollore [1] Slot di pin per servomotori e sensori[2], programmatore [3]
45
Tale microcontrollore si basa su un microprocessore SuperH™-2 7047 RISC. Dal venditore il microcontrollore è fornito senza firmware ed è l’utilizzatore a dover sviluppare il software [21].
Nel caso specifico di questo set up, il microcontrollore viene utilizzato per il controllo dei motori. L’input/output digitale è programmato come output per ottenere il PWM che si desidera per il controllo dei motori. I convertitori analogico-digitali possono esser usati per ottenere il controllo motorio usando dei potenziometri che si potrebbero attaccare al motore. In questo hardware di controllo il microcontrollore aspetta il dato riguardo all’impulso al motore dal personal computer che lo fornisce usando come canale di comunicazione una RS232 (tipologia seriale di comunicazione) che in particolare in questo setup è data dal cavo USB unito al programmatore. Il dato proveniente dal personal computer viene scritto sulla memoria Flash, che si resetta ad ogni uso.
Specifiche generali:
CPU SH7047F
Frequenza d’oscillazione della CPU 11.0592 MHz Clock della CPU 44.2368 MHz Range del voltaggio di alimentazione 5 V
Consumo di corrente continuo 0.5 A
Range di temperatura operativo -10℃~+60℃
Dimensioni 50.0 (mm) x 25.0 (mm) x 15.0 (mm) Porta di conversione A/D 16 canali, 10 bit di risoluzione Porta seriale (Prog. Port) livello TTL, 1
Porte dell’encoder 2 Comunicazione con il CAN Bus 2 Input-Output Digitale 3
Porta IRQ 1
46
E’ però possibile settare una parte della memoria Flash in modo che i dati che vi vengono scritti una volta vi rimangano e vengano letti ed eseguiti ad ogni accensione. Tale tecnica viene utilizzata in questo setup per dare il valore iniziale ai servo motori. Infatti il valore iniziale della posizione del motore si ottiene appena si collega il cavo USB proveniente dalla torretta di controllo al personal computer.
3.5 Piattaforma
La struttura portante è composta da due parti: una orizzontale in PerspexTM su cui sono fissati i tredici servomotori ed una verticale che scende all’interno della vasca alla cui estremità si trova una testa orientabile dove vengono fissati i mock-up in silicone di bracci del polpo (vedi Fig.3.11). La vasca viene riempita con acqua salata (la cui concentrazione di sale disciolto è
Fig. 3.9 schema del collegamento del motore al microcontrollore
47
di 35 g/L come lo è solitamente nell’acqua marina) e la parte verticale della piattaforma ed i mock-up vi sono completamente immersi.
Intorno alla puleggia di ciascun servo motore è fissato e avvolto un cavo in fibra di DyneemaTM (Gel Spun Polyethylene) che scorre parallelo alla lastra orizzontale per poi avvolgersi per mezzo giro intorno ad una puleggia locata all’estremità della lastra e scendere verticalmente dentro la vasca. L’estremità del cavo è assicurata con un gancio ad uno dei cavi interni del mock-up. Il punto dove la piattaforma ed il mock-up si uniscono è dotato di un anello per assicurare il mock-up alla piattaforma. Tale testa orientabile permette la rotazione della base dei mock-up su due assi, quello verticale e quello sagittale.
3.6 Software
Un software dedicato in C++ in ambiente Eclipse progettato da un partner del laboratorio della Scuola Superiore Sant’Anna controlla il movimento dei motori. Il software è composto da singleton, un particolare pattern di progettazione in cui viene ristretta l’istanziazione della classe a un solo oggetto. La convenienza di avere un unico oggetto si riscontra per esempio in uno dei singleton implementati: TitechBoard, composto, come gli altri singleton del software, da un header file e da un source file. Questa classe fa scrivere sul microcontrollore le ampiezze di ingresso date dal resto del programma e funziona quindi come comunicatore col microcontrollore stesso. E’ ottimale, quindi, che il comando riguardo ai motori possa venir dato al microcontrollore da una sola parte del programma che può venir aperto una
Fig. 3.11 Setup sperimentale: alimentatore [1], hardware elettronico [2], parte orizzontale e verticale della piattaforma [3] e [4], testa orientabile della piattaforma
48
volta sola grazie all’istanziazione unica tipica del singleton. In questo modo non ci possono essere più dati in ingresso al singolo motore ma solo uno.
Una volta che il programma è attivato oltre al thread del main vengono creati altri due
thread: LoopThread e MotiongeneratorThread. Loop è una abstract class che funziona da parent class da cui discendono tre diverse classi di cui solo una è utilizzata per questo
particolare uso del setup. Tale classe child viene chiamata ActuatingLoop ed è anch’essa strutturata come un singleton. In tale classe si trova un ciclo while che assicura ciclicamente che gli input d’ingresso siano nel range degli impulsi d’ingresso (la larghezza dell’impulso deve essere compresa tra 1100 microsecondi , cioè durata minima dell’impulso dato al servo motore, e 1900 microsecondi, durata massima del segnale PWM). La classe ActuatingLoop contiene al suo interno anche la funzione changesetPoints che assegna alle uscite del software da mandare ai motori un vettore. Nel constructor della classe ActuatingLoop c’è la chiamata per instanziare la classe TitechBoard che così comincia a far comunicare motori e microcontrollore. L’altro thread creato, cioè MotiongeneratorThread comprende anch’esso un ciclo while che consente all’utente di selezionare la larghezza dell’impulso d’ingresso per i servo motori ed il tipo di pattern di attivazione. I motori possono essere azionati o uno per volta o contemporaneamente ma per intervalli di tempo fissi e non modificabili a seconda del motore. I due cicli while devono essere sincronizzati visto che bisogna controllare che l’input sia nel giusto range mentre si danno i comandi ai motori. Per tale ragione il programmatore ha messo a punto un sistema di temporizzazione per cui viene preso il tempo all’inizio del ciclo, il tempo alla fine del ciclo che viene sottratto al primo. A questo punto la differenza viene sottratta da un valore noto che è il medesimo per entrambi i thread ed in entrambi i casi si fa aspettare il programma fino a che tale nuova differenza temporale non si è esaurita. In questo modo entrambi i thread ripartono solo quando il tempo equivalente al valore noto è trascorso.
Visto che metà dei motori ha una posizione ribaltata rispetto all’altra metà, per far sì che il comando dato in MotionGenerator possa essere lo stesso per i motori in entrambe le posizioni il programmatore ha fatto sì che i motori in numero dispari siano inizializzati a zero nella posizione di massimo range: 1900 microsecondi. Tale modifica è nella classe TitechBoard. In questa parte del programma è definito anche che ogni input ai motori dispari dato in MotionGenerator venga prima sottratto da 1900 microsecondi e che questa differenza sia l’input del motore dispari.
49
3.7 Setup per le prove sperimentali
Le prove sperimentali vengono ottenute utilizzando un setup (vedi fig. 3.12) comprensivo di tutti i componenti sopra elencati; l’unica differenza risiede nell’acquario che è stato sostituito con uno dalle dimensioni maggiori: 48x120x50 cm (HxLxP).
Le immagini vengono riprese con un sistema di telecamere professionali (Falcon 1.4 M 100-DALSA Corporation, CANADA) Le due telecamere sono disposte in modo che tra loro ci sia un angolo di 90°. La distanza delle telecamere dalla vasca tiene presenti più fattori. Infatti, dato che il numero di pixel in un'immagine (talvolta detto "risoluzione" dell'immagine) determina la quantità di dettagli fini che possono essere rappresentati se l’immagine viene scattata a distanza il contenuto informativo di ogni pixel sarà maggiore. Ciò diminuisce la risoluzione possibile riguardo ai soggetti dell’immagine stessa e rende più probabile un errore per esempio nella ricostruzione delle dimensioni degli oggetti rappresentati. D’altronde, se la telecamera è lontana l’errore di rifrazione tra l’aria e l’acqua diminuisce.
La configurazione di un sistema di visione tridimensionale può essere ad una, a due o più telecamere. Se la scena da osservare non è nota, cioè non è possibile contare su informazioni pregresse, sono necessarie almeno due telecamere, in quanto due proiezioni di un punto permettono di conoscerne la posizione nello spazio[23]. Nel setup sono necessari almeno 8 punti marker visti da entrambe le telecamere per effettuare la ricostruzione stereo del
50
soggetto rappresentato. Infatti vanno identificati gli 8 spigoli del parallelepipedo che racchiude il soggetto d’interesse nelle immagini di entrambe le telecamere. Il soggetto, naturalmente, anche durante il movimento deve rimanere all’interno del volume descritto dall’unione di questi punti. Il posizionamento della telecamera è un compromesso tra questi elementi. La distanza tra acquario e telecamera è di 120 cm.
Perché potessero essere visibili da entrambe le telecamere i marker sono stati posizionati all’interno della vasca stessa. Si è provato ad attaccare i marker direttamente sulla parete di vetro della vasca, ma questo si rifletteva sia sulla superficie specchiante che nell’immagine video ed era impossibile distinguere il marker dal suo riflesso. Così si è pensato di attaccare il marker ad un ago da infilare in un cubetto di materiale scuro che si potesse attaccare alla parete della vasca senza causare riflesso. Sono stati presi in considerazione e testati diversi materiali sia per la realizzazione di questo cubo sia per il loro fissaggio in modo da assicurare una buona durata dei marker nella posizione prescelta. La combinazione migliore è risultata quella di silicone (SL500-HenkelItalia S.p.A.) e sughero. Sono stati quindi applicati nell’interno della vasca 8 marker utilizzando questi materiali, l’ago per distanziare il vetro ed i marker, i quali sono stati realizzati con sferette di 6 mm di diametro tinte di bianco per risaltare sul fondo scuro dell’immagine.
Le immagini sono state registrate a 100 frame al secondo ma quando tali immagini sono state portate in formato .avi sono stati selezionati solo 20 frame al secondo, quantità più che sufficiente per i nostri scopi. Una volta che sono state acquisite dalle telecamere le immagini vengono visualizzate ed elaborate all’interno del programma software (Streams™ 5-IO Industries Inc., CANADA ).





![Fig. 3.8 struttura della torretta di controllo. Microcontrollore [1] Slot di pin per servomotori e sensori[2], programmatore [3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7369415.95240/10.892.284.591.350.606/struttura-torretta-controllo-microcontrollore-slot-servomotori-sensori-programmatore.webp)
![tab. 3.1 specifiche generali del microcontrollore[22]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7369415.95240/11.892.162.731.106.562/tab-specifiche-generali-del-microcontrollore.webp)

![Fig. 3.11 Setup sperimentale: alimentatore [1], hardware elettronico [2], parte orizzontale e verticale della piattaforma [3] e [4], testa orientabile della piattaforma](https://thumb-eu.123doks.com/thumbv2/123dokorg/7369415.95240/13.892.312.640.104.354/sperimentale-alimentatore-elettronico-orizzontale-verticale-piattaforma-orientabile-piattaforma.webp)