Capitolo 3
K-spazio e metodi di riempimento in applicazioni
cardiovascolari
3.1 Il k-spazio
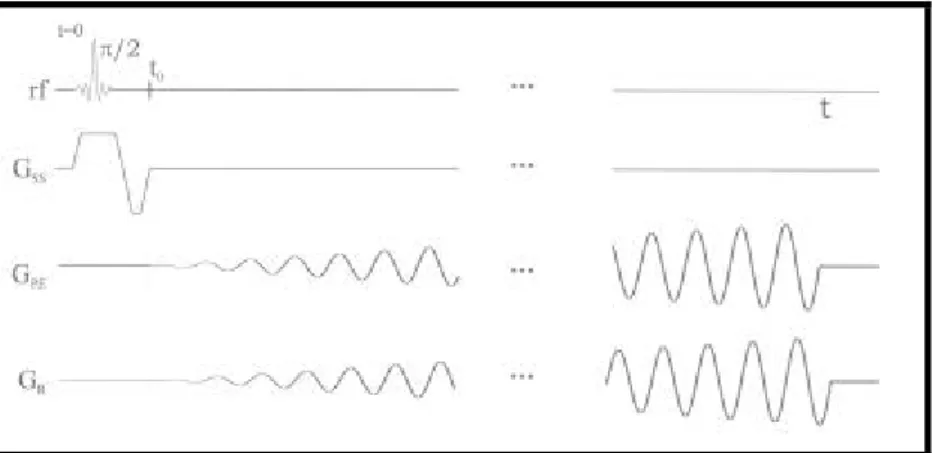
Nella Figura 3.1 viene presentato lo schema di base di una sequenza per la generazione dell’immagine di risonanza magnetica. Tali immagini sono in genere ottenute dopo l’analisi fatta nel dominio di Fourier, tecnica molto efficiente e versatile per identificare la locazione spaziale dei segnali di RM emessi dalle varie sorgenti del corpo in esame.
Figura 3.1
Avendo già descritto in dettaglio, nel primo capitolo, i passi che portano alla formazione dell’immagine, si farà semplicemente un breve riepilogo sulle codifiche di selezione della slice, su quella di frequenza e di fase per poi soffermare l’attenzione sul segnale ottenuto dopo l’applicazione dei vari gradienti
L’attivazione del segnale di radio frequenza e l’applicazione della codifica di selezione di slice consente, inizialmente, come sappiamo, l’eccitazione dei soli campioni presenti in una particolare fetta, la frequenza dei quali risulta direttamente proporzionale alla loro posizione lungo la direzione del gradiente di campo applicato dopo l’attivazione del gradiente di frequenza. Pertanto conoscendo l’intensità del gradiente Gx, dalle informazioni frequenziali del
segnale acquisito, si può risalire alla posizione dell’oggetto lungo la direzione del gradiente di campo. Si applica infine la codifica di fase, tra l’eccitazione e il periodo di lettura, per valutare i cambiamenti di fase della precessione dei protoni durante l’attivazione del gradiente Gy. Essa comporta prima il cambiamento di
frequenza di precessione dei protoni durante la sua attivazione e successivamente il mantenimento dello sfasamento dopo la disattivazione, pur avendo i protoni riottenuto la stessa frequenza. Da quest’ultima codifica si possono ottenere informazioni circa la localizzazione spaziale facendo variare l’ampiezza del gradiente Gy associato alla codifica suddetta e la durata di esso.
Si pone adesso l’attenzione sui segnali generati.
Supponendo che tali segnali siano campionati con un numero di campioni pari ad
N distanziati di T, si ottiene una matrice bidimensionale di dati, l’espressione dei
quali è compattata nella seguente equazione:
s(n,m)=e−(nT+td)/T2
∫∫
( , ) −i (nTGxx+mtyGyy)e y
x γ
ρ dxdy con 0 ≤ n≤ N , -M/2+1 ≤ m≤ M/2 [3.1] Essa rappresenta l’equazione dell’immagine.
Se si pone M=256 e per ogni valore di m si ottengono 256 campioni distanziati di tn=nT, si ottiene una matrice di 256*256 dati complessi. Ponendo
kx=γ nTGx [3.2] ky=γ mtyGy [3.3]
e supponendo che il periodo di codifica di fase ty e della codifica di lettura nT
siano molto più piccoli di T2, si può dare all’espressione precedente la seguente
forma: s(kx, ky)= x y e dxdy y k x k i x y
∫∫
−( + ) ) , ( ρ [3.4]Da tale espressione risulta chiaro che i valori complessi della matrice s(kx, ky) rappresentano i coefficienti di Fourier della funzione ρ(x,y)(densità protonica). Pertanto applicando una trasformazione bidimensionale inversa ai dati s(n,m) sarà possibile stimare la funzioneρ(x,y). kx e kysono pertanto delle frequenze spaziali
e si misurano in rad/m.
Per quanto riguarda la relazione tra la codifica di fase e di frequenza si riportano di seguito le seguenti espressioni:
φ x(t)=
∫
=∫
t x t x t dt G t xdt 0 0 ) ( ) ( γ ω [3.5] ydt t G dt t t t y t y y( ) ( ) ( ) 0 0∫
∫
= = ω γ φ [3.6]e comparandole con quelle relative a kxe ky si constata che queste ultime sono
proporzionali all’area dei gradienti ad esse associati. Si compattano infine le due espressioni nel seguente vettore:
K(t)=
∫
t d G 0 ) (τ τ γ [3.7]Con G(τ)variazione nel tempo del vettore gradiente.
Per semplicità di trattazione si è assunto che i parametri considerati siano costanti. In realtà ciò è in genere non esatto. Pertanto un’equazione più generale può risultare la seguente: s(K(t))= r p e dr sample r t K
∫
−2 ( ) ) , ( π ϕ [3.8]3.2 Metodi di riempimento del k-spazio usati per applicazioni cardiache
Come accennato in precedenza è possibile, grazie alle proprietà di simmetria della trasformata di Fourier per i dati reali, un acquisizione parziale dei contenuti del k-spazio scaricando l’onere dell’ottenimento dell’informazione su tutti i dati a sofisticati algoritmi di ricostruzione. Ciò risulta possibile riducendo il numero di codifiche di fase a discapito del SNR pur mantenendo costante la risoluzione spaziale.
La prassi seguita nell’attuazione di questa particolare procedura consisteva, inizialmente, nell’immagazzinamento dell’informazione contenuta nelle linee negative o positive del k-spazio e tutt’al più nel considerare alcune righe aggiuntive rispetto all’esatta metà, al fine di ridurre la distorsione di fase (con una riduzione del SNR di v2).
Attualmente si preferisce seguire un'altra strategia consistente nel ridurre la dimensione dei dati acquisiti, lungo la direzione della codifica di fase, alla dimensione esatta dell’oggetto che deve essere nell’immagine, evitando così di misurare i dati nel k-spazio fuori dell’oggetto.
Il mantenimento delle dimensioni convenzionali dell’immagine porta dunque al passaggio dal convenzionale k-spazio quadrato a quello di tipo rettangolare. In altri termini il campo di vista o FOV risulta rettangolare.
Applicando tale tecnica i dati acquisiti e memorizzati nel k-spazio risulteranno più distanziati permettendo così di lasciare invariata la dimensione della banda nella codifica di fase con il mantenimento della risoluzione spaziale, previo restando il fatto che occorre, ovviamente, aumentare l’ampiezza del gradiente della suddetta codifica.
Come risultato l’immagine finale conterrà informazioni nella zona centrale della matrice, con segnale assente nelle zone estreme relative.
Ovviamente i metodi del FOV rettangolare e dell’acquisizione parziale possono essere combinati al fine di avere si, una grande riduzione del tempo di acquisizione, ma di preservare l’SNR da grandi perdite (Figura 3.2).
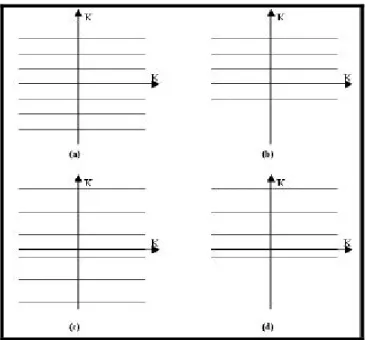
Figura 3.2: Rappresentazione schematica del k-spazio. a) con riempimento completo delle linee; b) con riempimento parziale (Half-Fourier); c) con un FOV rettangolare; d) con
combinazione di Half-Fourier e FOV rettangolare.
3.2.1 Segmentazione e acquisizione interallacciata dell’immagine
Nei metodi discussi fin ora viene acquisita e memorizzata una singola linea del k-spazio per ogni eccitazione RF con periodi di attesa tra l’attivazione dei vari impulsi per consentire il rilassamento longitudinale e lo sfasamento trasversale degli spin.
Esistono altresì dei metodi che permettono di sfruttare i tempi morti tra i vari impulsi RF per analizzare più fette in un tempo minimo. Si tratta dell’acquisizione interallacciata di immagini RM.
Tale tecnica sfrutta il principio secondo cui è possibile agire su gli spin di una slice adiacente a quella attivata dall’impulso RF nel tempo necessario agli spin della prima fetta a recuperare una appropriata magnetizzazione longitudinale (tempo di recovery).
Tale procedura può essere applicata ad un insieme di fette distanziate tra loro acquisendole non nell’ordine spaziale, visto che esse non presentano un profilo perfettamente rettangolare per cui fette adiacenti potrebbero sovrapporsi, ma prima tutte le dispari e poi le pari.
Alternativamente, all’interno di un singolo intervallo TR, possono essere acquisite più linee del k-spazio attivando più volte i gradienti di fase e di lettura. Ciò permetterà di avere una successione di segnali (echi) acquisiti con un unico impulso RF. Proprio per questo effetto creato, si dà a tale tecnica il nome di echo train.
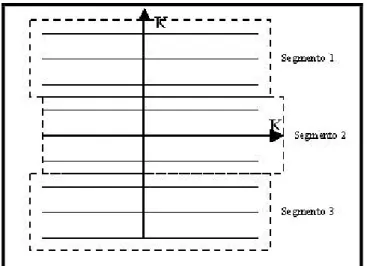
L’immagine ottenuta può quindi essere immaginata come una partizione in più segmenti, ciascuno dei quali contiene un tot numero di linee acquisite con un unico RF.
Se per esempio l’immagine comprende N=256 linee e viene segmentata in S=4, durante ciascun TR vengono attivati e disattivati gradienti di fase e di lettura per N/S=64 volte e ogni segmento contiene 64 linee del k-spazio.
Con tale metodo il tempo totale di acquisizione si riduce di S volte anche se il numero di linee del k-spazio acquisite è inalterato (Figura 3.3).
Figura 3.3: Rappresentazione schematica della tecnica di segmentazione
L’SNR dell’immagine risultante in questo caso risente dell’attenuazione tra una codifica di fase e l’altra dovuta ai rilassamenti spin-lattice e spin-spin.
Figura 3.4: Rappresentazione di acquisizione interallacciata di immagini RM.
3.2.2 Parallel Imaging
Si tratta di una strategia per l’acquisizione contemporanea di più segnali attraverso l’utilizzo opportuno di più bobine di ricezione. In letteratura esistono due tipi di categorie di imaging parallelo:
• strategie massivamente parallele, in cui il numero delle bobine riceventi il segnale RF coincide con il numero di segnali da acquisire ossia al numero delle linee del k-spazio. Questo permette di evitare l’uso dei gradienti per la codifica di fase, incrementando considerevolmente la velocità di acquisizione dell’immagine.
• strategie parzialmente parallele, in cui il numero delle bobine riceventi è decisamente minore rispetto a quello delle linee dei dati. Il tutto viene coronato da particolari algoritmi software che consentono la ricostruzione dell’immagine.
In queste tecniche, ciò che conta è non tanto la geometria delle bobine e la loro sezione, quanto piuttosto la capacità, da parte di ciascuna di esse di avere ‘sensitività’ particolare.
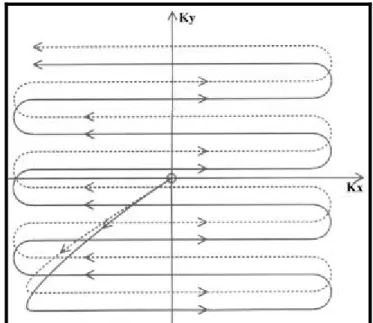
3.2.3 Metodo EPI
Il caso limite dell’acquisizione di più linee durante un intervallo TR si ha nel metodo a impulso singolo (single shot), per cui, con un unico TR, attivando e disattivando opportunamente i gradienti di fase e di lettura, viene riempito completamente tutto il k spazio. In questo caso il numero di echi nell’echo train corrisponde proprio al numero di linee del k-spazio e quindi dell’immagine finale. La sequenza in cui è stata implementata per prima questa metodologia è la Echo
Planar Imaging (EPI); in realtà, attualmente, la EPI e le sequenze da essa derivate includono anche la possibilità di acquisire immagini in più shot (più impulsi RF), coprendo così il k spazio in modo segmentato e/o interallacciato. Sarà dunque compito dell’operatore decidere se è preferibile ottenere immagini molto velocemente a discapito dell’SNR e di artefatti più o meno sostanziali o acquisire immagini con maggior ripetizioni d’impulsi RF.
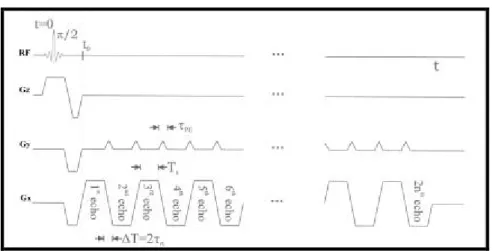
Nelle sequenze EPI a impulso singolo, tutti i dati necessari per ricostruire un’immagine sono ottenuti utilizzando un insieme, o treno, di echi dopo un singolo impulso RF, seguito da un brevissimo (blipped) tempo di attivazione e disattivazione del gradiente di fase, tra l’attivazione e disattivazione del gradiente di lettura con contemporanea acquisizione e memorizzazione dell’echo (Figura 3.5).
Figura 3.5: Rappresentazione della sequenza EPI ad impulso singolo
Con questa tecnica, il tempo totale di acquisizione delle immagini non dipende più da TR, ma ciò che contribuisce maggiormente è il tempo di accensione e spegnimento dei gradienti e il numero di volte in cui viene fatto (il numero di echi, ovvero il numero di linee del k spazio):
Ttot = NxNy∆t + Ny∆T
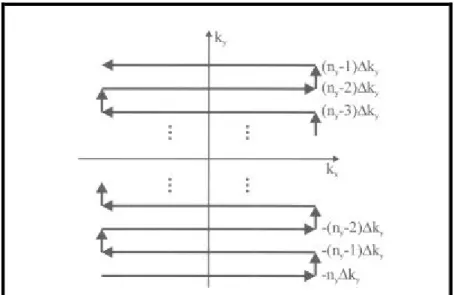
dove ∆T è il tempo che intercorre tra l’inizio di disattivazione del gradiente di lettura e l’inizio di riattivazione dello stesso gradiente per la lettura dell’eco successivo; ∆t è invece l’intervallo di tempo tra un dato e l’altro in una singola linea del k spazio (Figura 3.6):
Figura 3.6: Modalità di riempimento del k-spazio usando la sequenza EPI.
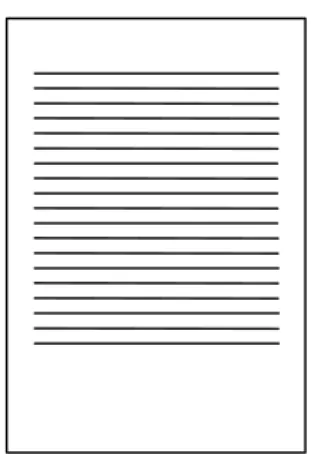
Il decadimento del segnale dovuto all’effetto di T2, l’ampiezza e la velocità di attivazione-disattivazione del gradiente di lettura impongono dei limiti sul numero di linee del k-spazio che possono essere realisticamente memorizzate dopo un singolo impulso RF, soprattutto nel caso in cui si voglia ottenere alta risoluzione spaziale. In tal caso è consigliabile ripetere più volte la sequenza per riempire il k-spazio con linee intermedie. Per far ciò si utilizza la sequenza di base (EPI) con la stessa forma dei gradienti eccezion fatta per Gy, gradiente di fase, che risulta inizializzato con un valore leggermente diverso per consentire il riempimento del k-spazio, partendo da una linea intermedia rispetto agli impulsi precedenti.
Per ottenere immagini cardiache con sequenze di tipo EPI, non è necessario acquisire tutta l’immagine in single shot in un singolo ciclo cardiaco.
Essendo infatti l’azione del cuore piuttosto ripetitiva e regolare, si può sincronizzare la sequenza con il ciclo cardiaco acquisendo un immagine con più impulsi RF sincronizzati singolarmente con l’ECG (Figura 3.7).
Figura 3.7: Esempio di riempimento del k-spazio
con più sequenze EPI ripetute.
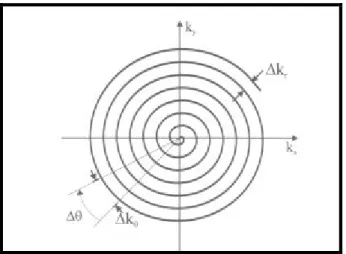
3.2.4 Metodo Spiral
Per applicazioni di tipo cardiaco, esiste il cosiddetto metodo Spiral che consente la memorizzazione del segnale nel k-spazio sottoforma di spirale crescente inseguito all’applicazione di una sequenza consistente in un impulso GRE con la successiva attivazione dei gradienti di fase e di frequenza in modo sinusoidale. Questi ultimi non presentano incrementi e decrementi rapidi, ma un andamento più dolce e
graduale durante il quale i dati sono acquisiti in tempi decisamente brevi (Figura 3.8).
Figura 3.8: Disegno della sequenza Spiral.
Non è possibile tuttavia applicare direttamente a questi dati la trasformata di Fourier: occorrerà considerare particolari algoritmi di interpolazione per trasferire i dati dalla spirale ad una griglia rettangolare.
Tale tecnica consente di ottenere un potenziale incremento della risoluzione spaziale: infatti aumentando il tempo di attivazione dei gradienti aumenta la copertura del k spazio e quindi si ha una maggiore risoluzione spaziale. Ovviamente, come per le sequenze EPI, anche le sequenze Spiral possono essere utilizzate con impulsi RF multipli: la Spiral viene ripetuta con un piccolo spostamento del gradiente di fase al fine di riempire spirali intermedie. E’ anche possibile, analogamente alle EPI, eseguire dei pre-impulsi di preparazione, per esempio SE o IR, alla sequenza Spiral (Figura 3.9).
Figura 3.9: Modalità di riempimento del k-spazio con la sequenza Spiral.
3.2.5 Metodi Smash e Sense
I metodi SMASH (Simultaneous Acquisition of Spatial Harmonics) e SENSE (SENSitivity Encoding technique) indagano sulle differenze di sensitività spaziale dell’organo sotto osservazione attraverso l’uso di una serie di bobine riceventi al fine di eliminare l’aliasing. Ciò richiede una stima di una mappa di sensitività delle bobine usando dati acquisiti per mezzo ad esempio del metodo TSENSE (time-adaptive SENSE) o del metodo di autocalibrazione che calcola tale mappa a bassa risoluzione spaziale da una vista di phase-encoding acquisita, intorno al centro del k-spazio, durante l’imaging.
Il vantaggio di tali metodi risiede comunque, non solo nell’ottenere un’alta risoluzione spaziale, ma anche nella capacità di adattamento a varie bobine e posizione del paziente. Tuttavia anche se le bobine attaccate a dispositivi possono essere mosse rapidamente, bisogna tenere in conto che il rapido movimento può
provocare alterazioni nella stima della sensitività e che può influire negativamente anche la geometria delle bobine utilizzate.
L’orientazione del piano di imaging che può cambiare frequentemente in qualsiasi direzione nonchè variazioni di parametri quali quello di magnetizzazione, semplicemente alterando mezzo di contrasto, sono le sfide principali proposte dall’interattivo real-time imaging
3.3 Metodo Unfold
Partendo dal presupposto che l’acquisizione di tutto il contenuto informativo del k-t spazio richiedeva, e richiede ancora, un ingenk-te dispendio k-temporale ossia k-tempi troppo lunghi per una visione dinamica dell'immagine e che quindi occorreva ridurre considerevolmente la lettura di parte di esso, lasciando l’onere di ricavare l’informazione rimanente a tecniche di approssimazioni, pur mantenendo l’obiettivo fisso di preservare la qualità delle immagini ottenute ,un gruppo di studiosi quali Bruno Madore, Gary H.Glover e Norbert J.Pelc focalizzò l’attenzione su tale problema arrivando alla risoluzione di esso attraverso quello che oggi è conosciuto come metodo Unfold (Unaliasing by Fourier-Encoding the Overlaps Using the Temporal Dimension). Tale metodo prevede l’eliminazione dell’aliasing (sovrapposizione spaziale del contenuto informativo) attraverso la dimensione temporale, consentendo, almeno nella parte centrale del k-spazio, la riduzione di un fattore due dei dati acquisiti nell’imaging cardiaco e di otto relativamente a quelli dell’fMRI.
Si procede inizialmente con la riduzione del FOV (field-of-view) dinamico. Ciò causa la diminuzione dei punti analizzati nel k-spazio ad un certo istante temporale, con la conseguente formazione di aliasing spaziale al medesimo istante t.
L’Unfold si serve della coordinata temporale per marcare le componenti che sono erroneamente sovrapposte nel dominio spaziale in modo da renderle individuabili univocamente durante l’elaborazione.
L’immagine di risonanza magnetica di un oggetto, viene ottenuta dopo il campionamento e la successiva elaborazione dell’informazione contenuta nei campioni acquisiti.
Per la gestione di questo problema, si propone un modello matematico con il quale si assume che la funzione di campionamento S(kr)sia data da un insieme di delta bidimensionali. Usando tale definizione, indicando con O(rr) l’oggetto da rappresentare e con I(rr) l’immagine ottenuta si ha:
) ( ) ( ) ( )) ( ( ) (r F S k O r PSF r O r I r = r ∗ r = r ∗ r [3.20]
Per semplicità si assume che lungo kx il campionamento sia così fitto da potersi
considerare continuo, mentre lungo ky avviene la cosiddetta codifica di fase
rendendo possibile applicare delle variazioni agendo sul prodotto tyGy ossia durata
ed entità del gradiente applicato.
Figura 3.10: Rappresentazione della funzione S(kx,ky)
Se la distanza ∆ky è sufficiente, la ripetizione dell'oggetto nell'immagine nel
dominio spaziale non comporta aliasing, ossia gli oggetti ripetuti lungo y non presentano sovrapposizione.
Supponendo un oggetto circolare si avrebbe la situazione di Figura 3.12 nella quale possiamo individuare il FOVy come la distanza tra le due linee tratteggiate:
Figura 3.11 P0 P1 1 0 -1 2 -2
Riducendo ulteriormente il FOVy si ottiene nel dominio xy e nello spazio k la
seguente situazione (Figura3.12):
Figura 3.12
È evidente l’aliasing spaziale. I punti P0 e P1 distinti in Figura 3.11 appaiono ora
sovrapposti. Per evitare tale fenomeno si propone con il metodo Unfold la seguente strategia.
Come primo passo si effettua una traslazione della funzione campionatrice di ‘f’. La traslazione di f nel dominio k comporta uno shift lineare di fase nel dominio spaziale, ossia la replica 0 risulta immutata, la 1 moltiplicata per un esponenziale complesso di argomento 2πf e così via. Adesso i due punti si sommeranno come mostrato in Figura 3.13.
1 0 P P +
Figura 3.13
Se per immagini dello stesso oggetto, acquisite ad istanti diversi, si usa uno sfasamento diverso si riuscirà a distinguere i punti sovrapposti. Vengono adesso proposti dei brevi esempi esplicativi.
Si considera una sequenza di immagini temporali e si associa alle immagini pari una frequenza nulla e a quelle dispari una frequenza pari a 0.5.
Il puntoP1 presenterà in tal caso due valori diversi: f i e
P1 2π ossia -P1 per le immagini
dispari e P1 per quelle pari.
Per quanto riguarda invece il punto P0 , a seconda che esso sia o no costante nel
tempo, presenterà le seguenti trasformate di Fourier (Figura 3.14):
Figura 3.14 A Figura 0 B f i e P P0 + 1 2π
Ossia se P0(t)è costante nel tempo allora la F(P0(t)) sarà una delta, altrimenti essa presenterà una certa banda.
Nel caso in cui sia P0(t) cheP1(t)siano dipendenti dal tempo, relativamente alle trasformate si avrà che quella relativa a P0(t)sarà centrata intorno alla frequenza nulla, mentre F(P1(t)) sarà traslata alla frequenza di Nyquist a causa della modulazione attuata da f(t). Ciò viene presentato nella Figura 3.15.
Figura 3.15
Come visibile, si ha nel dominio della frequenza la separazione delle bande. Tale problema può essere ulteriormente generalizzato.
Preso un voxel di un’esperienza di risonanza magnetica supponiamo che a causa dell’aliasing spaziale si trovano sovrapposti n punti indicando con n il fattore di sottocampionamento lungo kyrispetto alla frequenza di Nyquist.
Usando un indice j per ognuno di questi punti il valore risultante del voxel P(t) è dato da:
[3.11]
Dove con floor, si indica l’arrotondamento all’intero più vicino per difetto.
f 0 fNYQUIST F(P0(t)) F(P1(t))
∑
− = = ( 2) ) 2 ( ) ( 2 ) ( ) ( n floor n floor j j t f i j t e P t P πQualora si consideri per f(t) una funzione lineare del tipo
n t t
f( )= dove con t si indica il numero delle immagini della serie temporale si ha sostituendo nell’espressione generale:
[3.12]
L’esponenziale complesso è di fatto una base di Fourier e quindi in frequenza P(t)
appare come la sovrapposizione degli spettri dei Pj(t) centrati a frequenze diverse
equispaziate.
Siccome il segnale utile è centrato a frequenza nulla si opera un filtraggio passa basso per eliminare le componenti indesiderate.
A questo punto basta ritrasformare nel dominio temporale per ottenere il segnale senza aliasing.