CAPITOLO 6
Modellazione e identificazione
di due convertitori operanti in parallelo
6.1 Introduzione
La tecnica di modellazione descritta nel paragrafo 2.4 viene qui applicata al caso di due convertitori uguali fra loro: i parametri ottenuti al capitolo 5 dalla identificazione del convertitore in esame vengono qui usati per descrivere la dinamica di due convertitori uguali a quello esaminato e operanti in parallelo. Si ottiene cosi un modello del sistema complessivo che deriva dall’identificazione del singolo convertitore. Viene poi presentata l’identificazione diretta del sistema dei due convertitori e la successiva fase di validazione del modello ottenuto. Il capitolo si conclude con il confronto tra il modello individuato in fase di modellazione e quello prodotto dalla identificazione.
6.2 Modellazione
Ponendo N = 1 nella (2.43) e nella (2.44), e supponendo che le due unità siano perfettamente identiche si ha:
1 P = ' ' ' ' ' ' i x x i v v G G G G G G ; P = 2 ' ' ' ' ' ' ' ' ' T Y Y T Y Y Z A A in x x in out s s (6.1) essendo: u = (vˆc0, vˆc1)T (6.2) n = T g in in v i vˆ , ˆ ,ˆ ) ( 1 0 (6.3) y = T in in out i i vˆ , ˆ , ˆ ) ( 1 0 (6.4)
Come visto al capitolo due, se i due convertitori sono uguali le espressioni 2.44 si semplificano e diventano quelle di 2.47 e 2.48 che qui riportiamo per comodità:
2 ' v v G G = ; As As 2 1 ' = ; 2 ' T T = ; 2 ' out out Z Z = ; (6.5) 2 ' ⋅ ⋅ − = out v i i Z G T G G ; out s in in Z A T Y Y ⋅ ⋅ − = 2 ' ; 2 ' ⋅ ⋅ = out v x Z G T G ; out s x Z A T Y ⋅ ⋅ = 2 '
Sostituendo in 6.5 le espressioni ottenute identificando il sistema con singolo cnvertitore ed operando la semplificazione di modello (vedi tabella 5-14), si ricavano le funzioni di trasferimento di tabella 6-1. Si noti che le FdT sostituite hanno tutte lo stesso denominatore per cui si hanno ulteriori semplificazioni.
Tab. 6-1
Modellazione del sistema di 2 convertitori in parallelo derivata dal modello del singolo convertitore
-0.001122 s + 12.5 Gv ’ = --- 1.756e-006 s^2 + 0.0009275 s + 1 0.0002252 s^2 + 0.1175 s + 56.84 Gi ’ = --- 1.475e-008 s^3 + 1.467e-005 s^2 + 0.01203 s + 3.92 0.98 As’ = --- 1.756e-006 s^2 + 0.0009275 s + 1 1.498e-005 s^2 + 0.007539 s + 4.096 Yin’ = --- 1.475e-008 s^3 + 1.467e-005 s^2 + 0.01203 s + 3.92 -0.002099 s - 0.98 Zout’ = --- 1.756e-006 s^2 + 0.0009275 s + 1 0.98 T ‘ = --- 1.756e-006 s^2 + 0.0009275 s + 1 0.004396 s - 49 Gx’ = --- 1.475e-008 s^3 + 1.467e-005 s^2 + 0.01203 s + 3.92 -3.842 Yx’ = --- 1.475e-008 s^3 + 1.467e-005 s^2 + 0.01203 s + 3.92
6.3 Identificazione
6.3.1 Introduzione
Anche l’identificazione diretta del sistema di due convertitori, come quella del singolo convertitore, si avvale dei dati prodotti dal simulatore Pspice di OrDCAD 9.0: vengono misurate le risposte del sistema al segnale rumoroso di ingresso in un opportuno range di
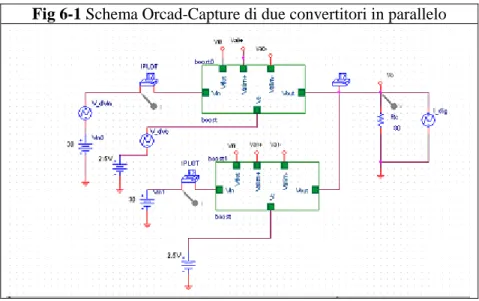
variazione e poi si applica l’algoritmo delle funzioni modulanti.. La figura 6-1 riporta lo schema Orcad-Capture usato nelle simulazioni.
Fig 6-1 Schema Orcad-Capture di due convertitori in parallelo
Definendo l’ingresso u, il disturbo n e l’uscita y come in 6.2, 6.3 e 6.4 rispettivamente, e supponendo il sistema lineare, occorre determinare le matrici di trasferimento M ed N t.c.
y = M u + N n (6.5) dove : M = i G x G x G i G v G v G ; N = T in Y x Y T x Y in Y out Z s A s A (6.6) avendo posto:
1 0 c out c out v v v v v G = = ; 1 0 1 c in c ino i v i v i G = = ; 0 1 1 c in c ino x v i v i G = = ; (vin0 =vin0 =ig0 =ig1 =0) (6.7) 1 0 in out in out s v v v v A = = ; 1 1 0 0 in in in in in v i v i Y = = ; 1 0 0 1 in in in in x v i v i Y = = ; (vc0 =ig0 =vc1 =ig1 =0) (6.8) 1 0 / / g out g out out v i v i Z = = ; T =iin0/ig0 =iin1/ig1; (vc0 =vin0 =vc1 =vin1 =0) (6.9)
Gli ingressi usati per la identificazione delle varie funzioni di trasferimento condividono tutti i seguenti parametri:
Durata simulazione Campionamento rumore Pulsazione di taglio filtro Campionamento segnale 400 ms 15 ms 10000 rad/s 30 us
La forma e il range di variazione del segnale di ingresso, invece, variano opportunamente con la funzione di trasferimento da identificare. In fase di predisposizione dei dati (preprocessing) sono stati eliminati 1334 campioni iniziali, pari a 40ms, al fine di tralasciare il transitorio iniziale del circuito e considerare solo i campioni utili. La sequenza informativa usata in fase di identificazione è così composta da 12000 campioni (pari a 360ms/30us). L’indagine del modello migliore è stata estesa anche ai sistemi con tre poli e due zeri per avere conformità con i risultati prodotti dalla modellazione.
6.3.2 Identificazione di
GvGi GxI risultati dell’identificazione sono riassunti in tabella 6-2
Tab. 6-2
(variaz . di 0.10V ripetto a Vc)
Idemt. di Gv Ident. di Gi Ident di Gx T E T E 3poli 0.013 0.1164 NP NP 0.016 0.3949 3poli 1 zero 0.01 0.1122 0.055 0.4157 0.013 0.3951 3poli 2 zeri 0.019 0.1130 0.013 0.3950 0.013 0.3953 2poli 0.046 0.1115 0.040 0.4078 0.013 0.3976 2poli1zero 0.019 0.1232 0.013 0.3965 0.013 0.3965
I modelli scelti sono quelli corrispondenti ai valori minimi dell’errore medio E (valori in grassetto in tabella 6-2), e sono riportati nelle figure 6-3,6-4 e 6-5.
In questo caso l’algoritmo di identificazione produce un sistema con due poli per Gv, uno con 3 poli e 2 zeri per Gi e uno di 3 poli per Gx, in totale accordo con i risultati della
modellazione (tabella 6-1.). La figura 6.2 riporta il segnale di ingresso usato per l’identificazione delle tre funzioni di trasferimento.
Fig. 6-3 Diagrammi del modello Gv
12.55 Gv = ---
1.72e-006 s^2 + 0.0009956 s + 1
Fig. 6-4 Diagrammi del modello Gi
6.78e-005 s^2 + 0.0218 s + 18
i
G = --- 4.07e-009 s^3 + 4.086e-006 s^2 + 0.002521 s + 1
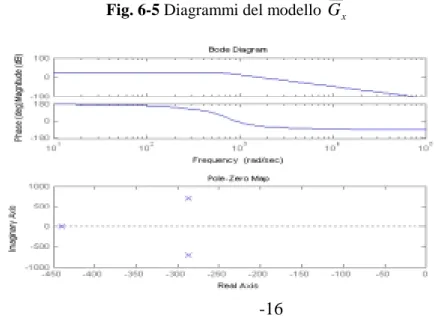
Fig. 6-5 Diagrammi del modello Gx
-16 Gx = ---
3.972e-009 s^3 + 4.027e-006 s^2 + 0.003275 s + 1
6.3.3 Validazione di
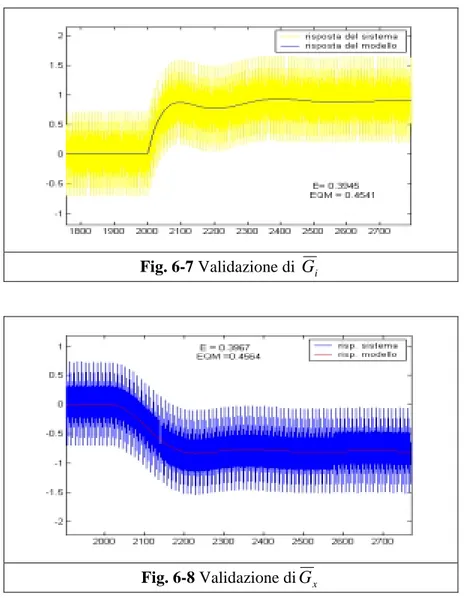
GvGi GxI modelli identificati sono stati sottoposti a validazione mediante l’analisi della risposta al gradino di ampiezza pari al 50% del range di variazione (figure 6-6, 6-7, 6-8 ).
I tutti e tre i casi la risposta al gradino del modello insegue bene quella effettiva del sistema simulato. Possiamo, dunque, ritenere attendibili i modelli ottenuti.
Fig. 6-7 Validazione di Gi
Fig. 6-8 Validazione diGx
6.3.4 Identificazione di
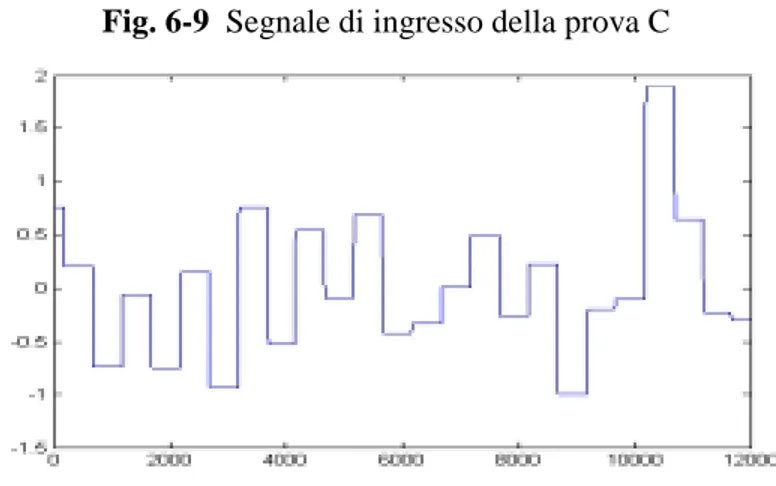
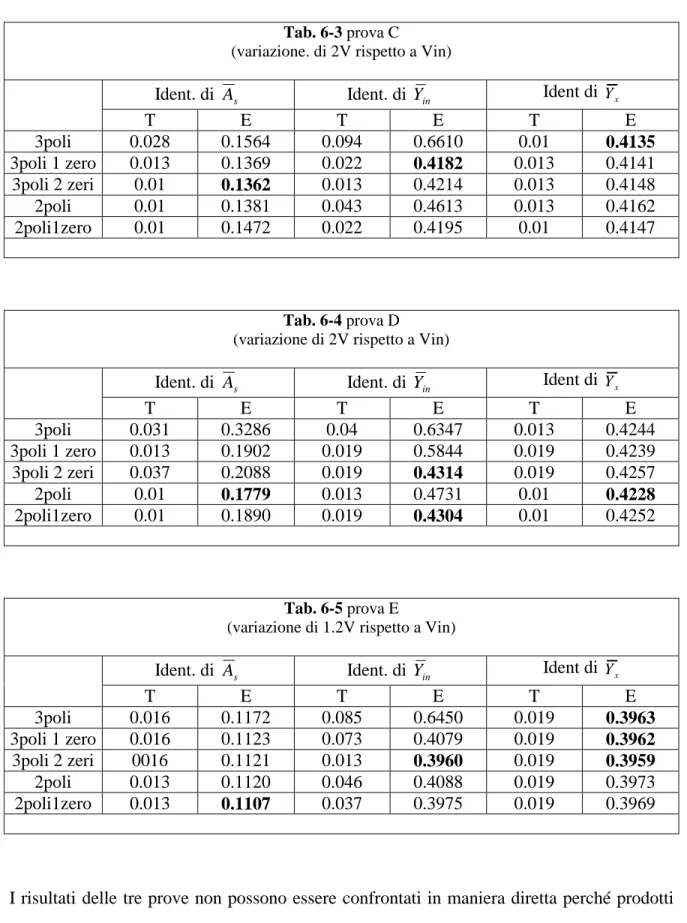
As YinYxIn questo caso, avere una identificazione accurata è stato un po’ più laborioso. Sono state condotte prima le prove C e D che usano due ingressi diversi ma nello stesso range di variazione di 0.12V. In fase di validazione però non si sono ottenuti risultati soddisfacenti allora si e proceduto con la prova E abbassando il range a 0.12V.
Le tabelle 6-3 e 6-4 e 6-5 riassumono i risultati prodotti dall’algoritmo di identificazione nei tre casi. Gli ingressi usati nelle tre prove sono riportati nelle figure 6-9 e 6-10 e 6-11
Fig. 6-9 Segnale di ingresso della prova C
Fig. 6-10 Segnale di ingresso della prova D
Tab. 6-3 prova C
(variazione. di 2V rispetto a Vin)
Ident. di As Ident. di Yin Ident di Yx
T E T E T E 3poli 0.028 0.1564 0.094 0.6610 0.01 0.4135 3poli 1 zero 0.013 0.1369 0.022 0.4182 0.013 0.4141 3poli 2 zeri 0.01 0.1362 0.013 0.4214 0.013 0.4148 2poli 0.01 0.1381 0.043 0.4613 0.013 0.4162 2poli1zero 0.01 0.1472 0.022 0.4195 0.01 0.4147 Tab. 6-4 prova D
(variazione di 2V rispetto a Vin)
Ident. di As Ident. di Yin Ident di Yx
T E T E T E 3poli 0.031 0.3286 0.04 0.6347 0.013 0.4244 3poli 1 zero 0.013 0.1902 0.019 0.5844 0.019 0.4239 3poli 2 zeri 0.037 0.2088 0.019 0.4314 0.019 0.4257 2poli 0.01 0.1779 0.013 0.4731 0.01 0.4228 2poli1zero 0.01 0.1890 0.019 0.4304 0.01 0.4252 Tab. 6-5 prova E
(variazione di 1.2V rispetto a Vin)
Ident. di As Ident. di Yin Ident di Yx
T E T E T E 3poli 0.016 0.1172 0.085 0.6450 0.019 0.3963 3poli 1 zero 0.016 0.1123 0.073 0.4079 0.019 0.3962 3poli 2 zeri 0016 0.1121 0.013 0.3960 0.019 0.3959 2poli 0.013 0.1120 0.046 0.4088 0.019 0.3973 2poli1zero 0.013 0.1107 0.037 0.3975 0.019 0.3969
I risultati delle tre prove non possono essere confrontati in maniera diretta perché prodotti da ingressi diversi. La scelta dei modelli finali è stata condotta sottoponendo a validazione
tutti i modelli migliori di ogni prova (valori in grassetto nelle tabelle 6-3, 6-4 e 6-5), valutando gli scostamenti tra modello e sistema in risposta ad un unico ingresso al gradino di ampiezza pari a 1V. La tabella 6-6 riporta gli indici di errore E ed EQM dei vari modelli confrontati.
Tab. 6.6
Scelta dei migliori modelli
(Errori nelle risposte al gradino di 1V)
Confronto per As
E EQM
Prova C_3poli 2zeri 0.1073 0.1115
Prova D_2poli 0.1073 0.1113
Prova E_2poli 1zero 0.1073 0.1115 Coonfronto per Yin
E EQM
Prova C_3poli 1zero 0.3973 0.4579 Prova D_2poli 1zero 0.4288 0.5107 Prova D_3poli 2zeri 0.3980 0.4591
Prova E_3poli 2zeri 0.3964 0.4562
Confronto per Yx E EQM Prova C_3poli 0.3974 0.4580 Prova D_2poli 0.3976 0.4580 Prova E_3poli 0.3971 0.4577
Prova E_3poli 2zeri 0.3971 0.4577
I modelli migliori sono quelli corrispondenti ai valori minimi degli indici di errore e sono evidenziati in grassetto in tabella 6-6. Naturalmente nel caso di Ase Yx, a parità di errore,
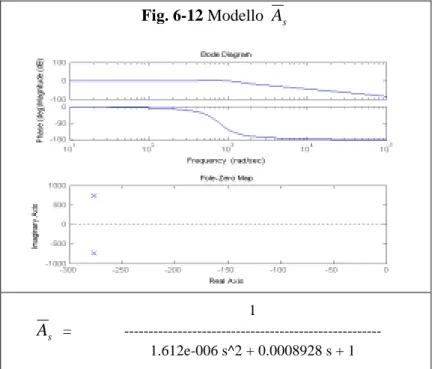
coerenti, in termini di numero di poli e di zeri, a quelli individuati in fase di modellazione. Le figure seguenti illustrano i sistemi identificati:
Fig. 6-12 Modello As 1 s A = --- 1.612e-006 s^2 + 0.0008928 s + 1 Fig. 6-13 Modello Yin 7.442e-006 s^2 + 0.002383 s + 1.3 in Y = --- 6.258e-009 s^3 + 6.182e-006 s^2 + 0.003504 s + 1
Fig. 6-14 Modello Yx -1.2 x Y = --- 4.419e-009 s^3 + 4.109e-006 s^2 + 0.003056 s + 1
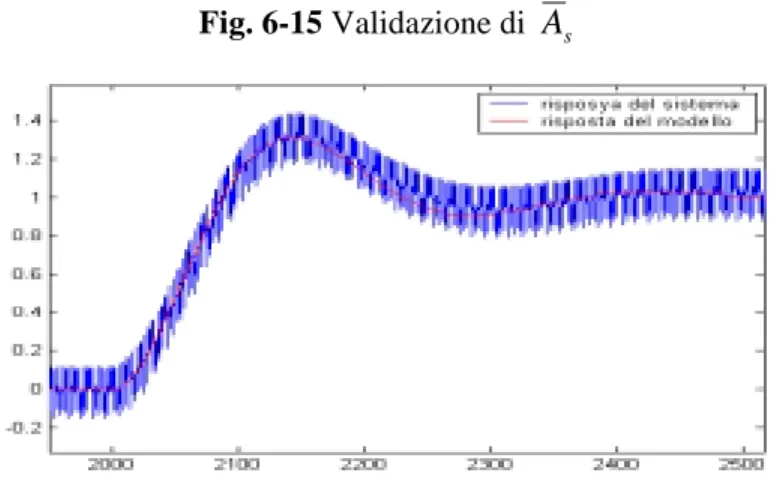
6.3.5 Validazione di
As YinYxLe figure seguenti riportano le risposte al gradino dei modelli identificati e del sistema simulato. I risultati sono abbastanza soddisfacenti.
Fig. 6-16 Validazione di Yin
Fig. 6-17 Validazione di Yx
6.3.6 Identificazione di
Zoute
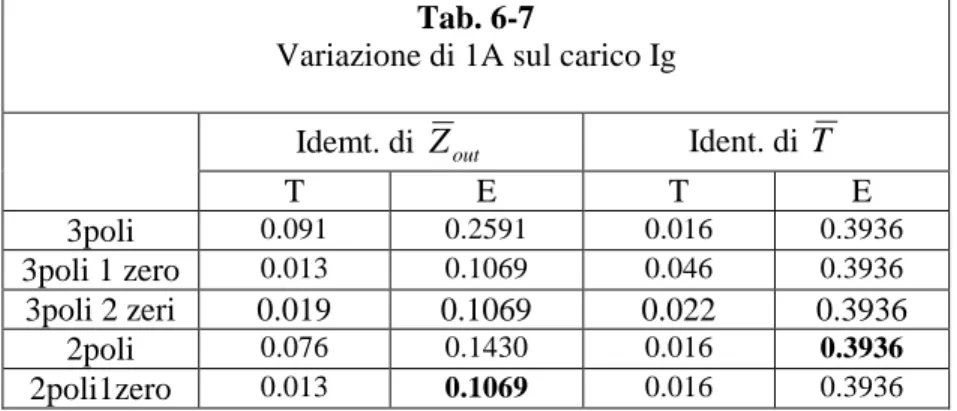
TTab. 6-7
Variazione di 1A sul carico Ig
Idemt. di Zout Ident. di T
T E T E 3poli 0.091 0.2591 0.016 0.3936 3poli 1 zero 0.013 0.1069 0.046 0.3936 3poli 2 zeri 0.019 0.1069 0.022 0.3936 2poli 0.076 0.1430 0.016 0.3936 2poli1zero 0.013 0.1069 0.016 0.3936
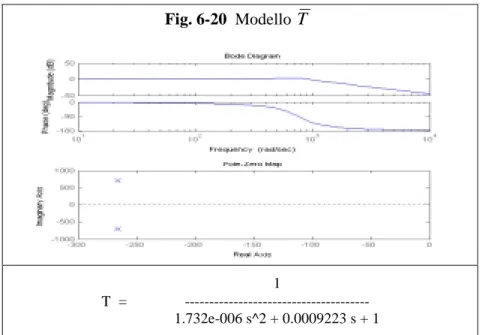
L’esame dei risultati riassunti in tabella 6-7 rivela che l’algoritmo di identificazione in questo caso non fornisce precise indicazioni sul numero di poli e di zeri di Zout o di T . In conformità con le indicazioni fornite dalla modellazione, scegliamo dunque un sistema con 2 poli e uno zero per Zout e uno con due poli per T .
I modelli identificati sono riportati nelle figure 6-19 e 6-20. La figura 6-18 riporta invece l’ingresso usato in questo caso.
Fig. 6-18 Ingresso usato per identificare Zout e T
Fig. 6-19 Modello Zout
-0.00207 s - 0.836 Zout = ---
Fig. 6-20 Modello T
1
T = --- 1.732e-006 s^2 + 0.0009223 s + 1
6.3.7 Validazione di
Zoute
TL’ampiezza del gradino usato per la validazione è di 0.5 A, pari al 50% del range di identificazione. I risultati in questo caso sono soddisfacenti come si evince dall’analisi delle figure seguenti:
Fig 6-22 Validazione di T
6.4 Confronto tra modello “derivato” e modello “diretto”
Al fine di essere più chiari nell’esposizione, e favorire la distinzione tra il modello derivato in fase di modellazione a partire da quelli dei singoli moduli convertitori, e quello ottenuto dalla identificazione diretta del sistema dei due convertitori in parallelo, useremo qui il termine “derivato” per indicare il primo modello, e l’aggettivo “diretto” per riferire il secondo. Il confronto tra i due viene condotto sottoponendo a validazione entrambi i modelli , usando un unico ingresso (vedi figura 6-11).
I modelli in esame sono entrambi sistemi MIMO lineari, quindi possiamo confrontare direttamente gli elementi delle matrici di trasferimento del primo sistema con i corrispondenti elementi matriciali del secondo. Le figure seguenti illustrano tale confronto.
Fig. 6-12 Confronto in frequenza tra Gv' e Gv
Fig 6-13 Validazione di Gv' e Gv con doppio gradino
Modello E EQM v G (diretto) 0.1023 0.1064 ' v G (derivato) 0.1025 0.1080
Fig_6-14Confronto in frequenza tra Gx' e Gx
Fig 6-15 Validazione di Gx' e Gx con doppio gradino
Modello E EQM x G (diretto) 0.3924 0.4519 ' x G (derivato) 0.3995 0.4638
Fig 6-16 Confronto in frequenza tra Gi' e Gi
Fig. 6-17 Validazione di Gi' e Gi con doppio gradino
Modello E EQM i G (diretto) 0.3927 0.4532 ' i G (derivato) 0.3991 0.4636
Fig. 6-18 Confronto in frequenza tra As' e As
Fig. 6.19 Validazione di As' e Ascon doppio gradino
Modello E EQM s A (diretto) 0.1058 0.1136 ' s A (derivato) 0.1053 0.1122
Fig. 6-20 Confronto in frequenza tra Yin' e Yin
Fig. 6-21
Validazione di Yin' e Yin con doppio gradinoModello E EQM in Y (diretto) 0.3926 0.4530 ' in Y (derivato) 0.4060 0.4764
Fig. 6-22 Confronto in frequenza tra Yx'e Yx’
Fig. 6-23 Validazione di Yx'e Yx’ con doppio gradino
Modello E EQM x Y (diretto) 0.3927 0.4531 ' x Y (derivato) 0.4068 0.4773
Fig.6.24 Confronto in frezuenza tra Zout' e Zout
Fig. 6-25 Validazione di Zout' e Zout con doppio gradino
Modello E EQM out Z (diretto) 0.1050 0.1093 ' out Z (derivato) 0.1076 0.1220
Fig. 6.26 Confronto tra T' e T
Fig. 6.27 Validazione di T' e T con doppio gradino
Modello E EQM
T (diretto) 0.3924 0.4516
'