Metodologie computazionali di analisi FSI
3.1 Introduzione
La metodologia di analisi della FSI si può suddividere in due distinte categorie [4]:
• interazione “one way” • interazione “two way”
3.2 Interazione “One Way”
Nell’interazione one way (monodirezionale) il fluido crea delle azioni sulla struttura ma la risposta (in termini di deformazione) della struttura stessa ha effetti trascurabili sul moto del fluido.
Per esempio un fluido può riscaldare o raffreddare una struttura rigida. Per effetto della variazione termica nel materiale solido, si creano degli stati di tensione e deformazione che portano a variazioni del campo fluidodinamico così piccole da poterle trascurare.
In questa situazione si ha uno scambio di calore bidirezionale tra il fluido e la struttura, mentre lo scambio di informazioni meccaniche è monodirezionale. Risulta quindi sufficiente ricavare la temperatura attraverso la simulazione fluidodinamica di entrambi i domini ed in seguito procedere con la conseguente analisi strutturale, in una simulazione separata del componente solido.
L’interazione monodirezionale può anche avvenire nel senso opposto. Basti pensare ad un pistone il cui moto influenza le caratteristiche del fluido nella camera di combustione. Le variazioni del flusso al contrario non hanno ripercussioni apprezzabili sul pistone.
3.3 Interazione “Two Way”
Nell’interazione bidirezionale il fluido influenza lo spostamento e la deformazione della struttura che a sua volta ha effetti significativi sul fluido. La struttura risponde ai carichi di pressione o alle tensioni dovute agli effetti viscosi del fluido. Il fluido invece risponde alla deformazione della struttura in vari modi. È da notare che la forma del corpo influenza il dominio fluido ma è la sua velocità di deformazione ad avere i maggiori effetti.
L’accelerazione della struttura porta ad una risposta proporzionale della pressione, proprio come l’accelerazione del flusso porta alla nascita di gradienti di pressione. Si può avere un esempio di ciò pensando ad un martello che colpisce un tubo. La risposta nel fluido è la comparsa di un’onda di pressione, mentre nella struttura le deformazioni possono essere impercettibili. In questo caso la risposta è dovuta non all’entità della deformazione ma quanto velocemente lo abbia fatto.
In molti casi l’interazione fluido struttura viene condotta attraverso simulazioni dinamiche, in cui si è interessati esplicitamente al transitorio. In altri è importante considerare la soluzione di tipo statico, ad esempio la deformazione di una struttura alare in condizioni di flusso stazionario.
Per ottenere questa configurazione è possibile analizzare un transiente che porta la struttura dalla configurazione iniziale (scarica) a quella finale (deformata), in equilibrio statico con il flusso.
In detto caso il time-step perde di significato fisico, in quanto l’interesse è solo diretto alla soluzione stazionaria. Questo implica che per ottimizzare i tempi di convergenza si può imporre la velocità di spostamento locale della struttura uguale a zero, nonché aumentare lo smorzamento strutturale senza inficiare in alcun modo il risultato finale.
Tradizionalmente la FSI considera accoppiamenti bidirezionali fra fluido e struttura deformabile. In questa categoria di accoppiamento si possono definire due sottocategorie:
• “weak” (debole) • “strong” (forte)
3.3.1 Accoppiamento Weak
In alcuni problemi di FSI l’accoppiamento si può considerare debole. Si consideri per esempio una struttura che si inflette in un flusso stazionario.
La flessione può alterare significativamente le caratteristiche del flusso nell’intorno della struttura che, a sua volta, influenza la flessione. Quando si cerca una soluzione stazionaria del problema, ciò che interessa è la forma finale media che la struttura assume. Avvicinandosi alla condizione stazionaria, la velocità dei punti materiali della struttura si approssima allo zero. In questa situazione l’accoppiamento è debole perchè la struttura non impartisce più movimento al fluido.
Per risolvere il problema di determinare la condizione stazionaria finale è quindi sufficiente utilizzare un algoritmo di accoppiamento libero (vedi paragrafo modello loosely coupled).
Si può inizialmente calcolare il flusso considerando la struttura rigida. La pressione così calcolata può essere passata a un solutore strutturale separato e le deformazioni della struttura calcolate da questa stima iniziale dei carichi.
Le deformazioni ottenute possono essere fornite all’analisi CFD, per il calcolo del flusso stazionario intorno alla struttura deformata. Procedura che può essere ripetuta finché non si raggiunge una condizione stazionaria.
Questo tipo di analisi non considera scale temporali in quanto non è importante come la struttura raggiunga la stazionarietà ma esclusivamente quale soluzione raggiunga.
Il solutore fluidodinamico deve solo conoscere la posizione dell’interfaccia fluido-struttura e non quanto velocemente si muove.
In generale si ha accoppiamento debole quando i tempi di risposta della struttura a un disturbo nel fluido sono lenti se paragonati a quelli del fluido. Bisogna fare attenzione alla differenza fra accoppiamento debole e algoritmi di accoppiamento deboli. L’accoppiamento debole si riferisce alla forza dell’accoppiamento in senso fisico, mentre, gli algoritmi di accoppiamento deboli, si riferiscono al livello di accoppiamento dei codici di soluzione, strutturale e fluidodinamico.
L’algoritmo di accoppiamento debole può significare semplicemente passare dati tra differenti codici usando file, registrati sul disco rigido, e quindi il solutore fluidodinamico e strutturale non sono necessariamente eseguiti sul processore contemporaneamente.
Con questo tipo di algoritmi si ha generalmente una soluzione di tipo esplicita perchè la risposta del solido dipende dalle condizioni del fluido al time step precedente e viceversa. Spesso ci si riferisce a questo approccio come accoppiamento “staggered” (sfalsato).
Questo tipo di analisi è caratterizzata da ridotti tempi di convergenza delle simulazioni e per questo è conveniente utilizzarla in fase di progetto preliminare.
3.3.2 Accoppiamento Strong
Approccio generalmente associato a problemi dinamici, dove i carichi idrodinamici e le velocità strutturali cambiano significativamente.
Negli algoritmi di accoppiamento forte i solutori, fluidodinamico e strutturale, devono essere eseguiti sui processori contemporaneamente e i dati devono essere scambiati a intervalli regolari (spesso definito come tempo o step di accoppiamento). A seconda dell’effettiva forza dell’accoppiamento può essere necessario scambiare i dati fra i solutori anche più di una volta per time step per consentire alla simulazione di rimanere stabile.
Questo tipo di accoppiamento (chiamato anche implicito) implica una comunicazione più profonda fra i codici ed è necessario quando una struttura relativamente leggera o poco rigida interagisce con un fluido relativamente pesante e quando si è interessati ai comportamenti della struttura di tipo non stazionario.
Si può concludere che se si è interessati alla configurazione statica di un’ala investita da un flusso stazionario è più conveniente utilizzare l’accoppiamento weak, mentre se si cerca il comportamento dinamico della stessa è necessario utilizzare l’accoppiamento strong.
3.4 Modelli di algoritmo per la soluzione
Prima di analizzare i vari modelli di algoritmo utilizzati nell’aeroelasticità computazionale è utile analizzare le equazioni generalizzate del moto per spiegare poi le metodologie adottate per risolvere il problema.
[𝑀𝑀]{𝑞𝑞̈(𝑡𝑡)} + [𝐶𝐶]{𝑞𝑞̇(𝑡𝑡)} + [𝐾𝐾]{𝑞𝑞(𝑡𝑡)} = {𝐹𝐹(𝑡𝑡)} {𝑤𝑤(𝑥𝑥, 𝑦𝑦, 𝑧𝑧, 𝑡𝑡)} = � 𝑞𝑞𝑖𝑖 𝑁𝑁 𝑖𝑖=1 (𝑡𝑡)𝜑𝜑𝑖𝑖(𝑥𝑥, 𝑦𝑦, 𝑧𝑧) Dove :
• 𝑊𝑊(𝑥𝑥, 𝑦𝑦, 𝑧𝑧) = Spostamento strutturale in ogni posizione e ad ogni
istante di tempo.
• 𝑞𝑞(𝑡𝑡) = vettore degli spostamenti generalizzati.
• 𝜑𝜑𝑖𝑖 = modi propri della struttura con N numero totale dei modi
della struttura.
• [𝑀𝑀], [𝐶𝐶], [𝐾𝐾] = Matrici di massa, smorzamento e rigidezza
generalizzati.
• 𝐹𝐹(𝑡𝑡) = vettore delle forze generalizzate. Termine responsabile del
collegamento tra i carichi dovuti all'aerodinamica non stazionaria e la dinamica della struttura.
La prima equazione mostra che i termini che rappresentano la struttura, l’aerodinamica e la dinamica sono distinti consentendo quindi una flessibilità nella scelta dei metodi di soluzione.
Gli algoritmi maggiormente utilizzati sono [5] :
• Modello fully coupled • Modello loosely coupled • Modello closely coupled
3.4.1 Modello fully coupled
In questo algoritmo le equazioni fluidodinamiche e strutturali vengono risolte e integrate nel tempo simultaneamente attraverso un unico solutore.
Usando questo tipo di procedura bisogna considerare che le equazioni del fluido sono descritte attraverso un sistema di riferimento Euleriano, mentre le equazioni strutturali attraverso un sistema di tipo Lagrangiano.
Le matrici del sistema strutturale risultano essere più complesse rispetto a quelle del sistema fluido e questo rende praticamente impossibile risolvere le equazioni usando uno schema computazionale monolitico.
Guruswamy e Byun [6], [7] per risolvere il problema hanno combinato le equazioni del flusso di Eulero con una struttura modellata con elementi finiti piani e in seguito hanno combinato le equazioni di Navier-Stokes con una struttura modellata agli elementi di tipo shell. Per eseguire i calcoli di interazione fluido struttura hanno utilizzato un metodo di suddivisione del dominio, in modo che il fluido e la struttura siano risolti in moduli separati.
Il metodo fully coupled presenta delle limitazioni relative alla grandezza della griglia a causa dell’elevato costo computazionale e ciò rende il suo utilizzo limitato a problemi bidimensionali.
3.4.2 Modello loosely coupled
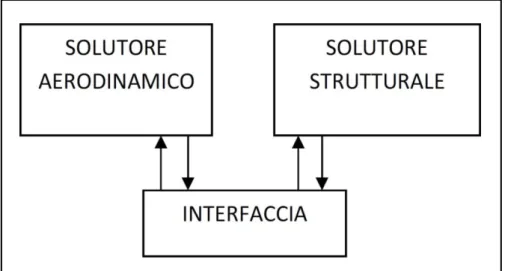
In questa procedura, a differenza dei metodi fully coupled, le equazioni strutturali e fluidodinamiche sono risolte usando due solutori separati.
Ciò porta alla presenza di due griglie computazionali differenti che possono non coincidere perfettamente sul contorno. Nasce quindi la necessità di sviluppare una tecnica di interfaccia per poter scambiare le informazioni tra i due moduli. Le interazioni fra i moduli fluidodinamico e strutturale sono esclusivamente esterne e le informazioni sono scambiate dopo una parziale o completa convergenza. Sono quindi utilizzati due codici commerciali differenti combinati tra loro attraverso un codice di interfaccia.
Figura 3.1 - Schema algoritmo loosely coupled -
Ciò permette una elevata flessibilità nella scelta dei solutori sia per il problema aerodinamico che strutturale.
3.4.3 Modello closely coupled
Questa metodologia utilizza due diversi solutori, aerodinamico e strutturale, accoppiati in modo stretto e diretto, cioè senza l'uso di un terzo solutore di interfaccia.
Le equazioni fluidodinamiche e strutturali sono risolte separatamente da differenti solutori e accoppiate in un singolo modulo, con lo scambio di informazioni che avviene sul contorno, attraverso un modello d'interfaccia interno a uno dei due solutori.
Tutto ciò rende l'intero modello strettamente accoppiato e più efficiente per complessi problemi non lineari.
Le informazioni scambiate sono:
• I carichi superficiali, mappati dalla griglia superficiale fluidodinamica alla griglia strutturale.
• Il campo di spostamenti, mappato dalla griglia strutturale alla griglia fluidodinamica.
Il trasferimento dello spostamento superficiale sulla griglia fluidodinamica implica che la mesh fluidodinamica si debba deformare ed è quindi necessario implementare una tecnica di morphing che consenta di ottenere una nuova mesh ad ogni time-step.
Ciò può causare problemi per griglie multi-block o per geometrie complesse. Diversi modelli sono stati combinati:
• per la fluidodinamica si parte da semplici modelli di flusso potenziale fino ad arrivare a complessi modelli RANS tridimensionali;
• per la struttura si usano modelli che vanno da elementi finiti lineari (modello trave) a elementi finiti solidi non lineari.
La difficoltà delle tecniche di interconnessione dipende dalla complessità con la quale i modelli sono rappresentati nei rispettivi moduli.
3.5 Soluzione fully coupled interna a STAR-CCM+
È possibile simulare l’interazione fluido struttura interamente all’interno di STARCCM+, utilizzando il modulo di soluzione Solid Stress. Questa metodologia appartiene alla categoria fully coupled, poiché permette di risolvere le equazioni strutturali e fluidodinamiche all’interno di un unico codice.
Le equazioni strutturali sono risolte in un sistema di riferimento Lagrangiano utilizzando un approccio ai volumi finiti (FVA). Attualmente sono supportati solo materiali elastici lineari.
I volumi finiti, a differenza degli elementi finiti, non presentano controparti strutturali come beams e shells e tutti gli elementi devono essere modellati come elementi tridimensionali. Ciò comporta difficoltà legate al numero elevato di celle da utilizzare anche per geometrie poco complesse.
Inoltre i volumi finiti sono molto sensibili alla qualità delle celle, perciò risulta necessario prestare particolare attenzione alla realizzazione della mesh per non incorrere in problemi di convergenza.
La modellazione dell'interazione fluido struttura può supportare sia piccoli che grandi spostamenti del solido. Per i piccoli spostamenti (devono essere piccoli rispetto alla grandezza della cella), viene assunta un’approssimazione per descrivere il moto del contorno solido all’interno del fluido con la mesh che rimane fissa.
In questo caso un flusso apparente viene calcolato per stimare il comportamento del fluido che verrebbe creato dallo spostamento della struttura.
Nel caso di grandi spostamenti (le deformazioni e le tensioni devono essere comunque piccole) il contorno del solido viene effettivamente spostato attraverso la deformazione della mesh.
È importante ricordare che grandi spostamenti del solido, comportano grandi spostamenti della mesh fluida, rendendo necessario il “morphing” della griglia o il “remeshing”.
I vantaggi nel trattare il problema strutturale ai volumi finiti sono:
• L’interpolazione dei dati fra solido e fluido è completamente automatizzata all’interno di STAR-CCM+. Non è necessario utilizzare codici esterni per eseguire il passaggio dei dati e l’interpolazione.
• La comunanza delle strutture dei dati e della tecnologia di risoluzione, trattando il solido e il fluido all’interno di STAR-CCM+. Il costo per iterazione per cella per il solido è circa lo stesso che per il fluido ed il passaggio di dati tra i codici può essere effettuato più frequentemente rispetto al passaggio di dati tra codici CFD e FEA.
Ciò che rende il metodo svantaggioso, è la grande quantità di celle necessaria per modellare le geometrie d’interesse. Infatti se da un lato il costo computazionale per cella ai volumi finiti è decisamente inferiore rispetto al costo computazionale agli elementi finiti, il maggior numero di celle rende il metodo sconveniente. Inoltre l’analisi strutturale utilizza comunemente gli elementi finiti e ciò comporta una maggiore esperienza e una maggiore padronanza di questo metodo.
3.6 File based coupling
Un altro metodo che permette di risolvere problemi di FSI è il file-based coupling, che rientra nella tipologia di metodi loosely coupled.
Questo metodo consente di accoppiare STAR-CCM+ con altri codici CAE attraverso file esterni. In questa maniera si ottiene la soluzione usando codici separati per ogni parte del modello, come appunto nel caso di dominio fluido e solido in problemi FSI.
All’interno di STAR-CCM+ sono presenti strumenti che consentono di importare geometrie CAD e utilizzarle per una simulazione “one way” o “two way”.
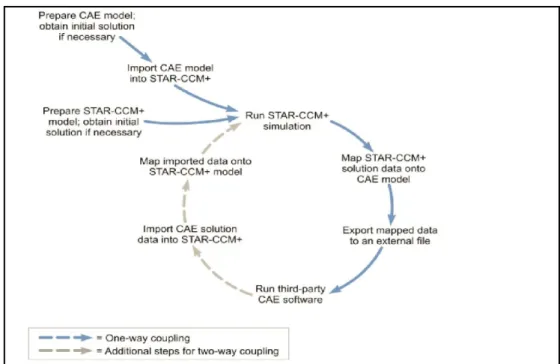
In problemi one way, i dati della soluzione ottenuti in STAR-CCM+ possono essere mappati sul modello CAE e esportati in un formato che può essere letto da un altro codice. I dati esportati possono essere utilizzati per specificare le condizioni al bordo o le condizioni operative nel modello CAE.
Un esempio dell’applicazione di questo metodo è il calcolo del trasferimento di calore congiunto nel fluido e solido attraverso STAR-CCM+ e quindi l’esportazione della temperatura della regione solida in un file esterno.
Questo file può essere poi letto in un altro codice e usato per calcolare lo stress termico del solido.
Il diagramma di flusso delle operazioni da eseguire è mostrato nella figura 3.3 (freccia blu).
Per un accoppiamento two way, si può proseguire importando i dati dal codice esterno in STAR-CCM+. Tali dati possono essere utilizzati come condizione al contorno per il modello in STAR-CCM+ o per aggiornare la mesh.
Un esempio di accoppiamento two way è l’uso di STAR-CCM+ per calcolare le forze di pressione e di attrito sull’interfaccia fluido-solido, utilizzando i dati ottenuti per definire i carichi sulla stessa superficie nel modello CAE.
Si calcolano dunque gli spostamenti nodali nel modello solido che successivamente si importano in STAR-CCM+ e sono usati come input per eseguire il morphing della mesh.
La nuova simulazione in STAR-CCM+ deve essere avviata usando la geometria aggiornata e, l’intero processo, può essere ripetuto finchè non si raggiunge la convergenza.
Il diagramma di flusso delle operazioni da eseguire per l’accoppiamento two way è un’estensione di quello per l’accoppiamento one way. I passi aggiuntivi sono mostrati sempre in figura 3.3 (freccia grigia tratteggiata).
3.6.1 Mapping Data
Un aspetto fondamentale della procedura è quello dell'interfaccia tra la mesh fluida e quella strutturale.
L’obiettivo dello schema di interfaccia è quello di:
• realizzare praticamente la connessione ad anello chiuso tra il sistema strutturale ed il sistema aerodinamico, mediante un’opportuna procedura di interpolazione;
• garantire che lo scambio di informazioni avvenga in modo accurato, efficiente e flessibile.
Progettare ed implementare numericamente uno schema di interfaccia che soddisfi tali requisiti non sono operazioni banali, poiché i modelli strutturale ed aerodinamico da interconnettere sono in generale caratterizzati da differenti domini spaziali e differenti griglie di calcolo (per tipologia di elementi, numero e posizionamento dei nodi).
STAR-CCM+ offre diverse strategie per mappare dati in modo efficiente e accurato fra le due diverse mesh. Attualmente gli algoritmi per l’interpolazione usati, sono accurati fino al primo ordine.
La mappatura rappresenta il processo di interpolazione di un set di dati tra due modelli separati, per esempio la distribuzione di pressione dal dominio fluido può essere mappata sulla corrispondente superficie nel dominio solido e usata come carico applicato.
La mappa sull’interfaccia comporta l’interpolazione dei dati tra due superfici, una superficie e un set di vertici, o tra una regione e un volume.
Nell' accoppiamento two-way la mappatura dei dati viene effettuata sia per esportare i dati da STAR-CCM+ al programma agli elementi finiti ma anche quando si devono importare in STAR-CCM+ i dati provenienti dalla soluzione strutturale (vengono prima importati in STAR-CCM+, poi mappati sulla superficie ed infine, nel caso di spostamenti nodali, usati per deformare la mesh attraverso il morphing).
La mappatura presenta diverse difficoltà come la differenza di densità o topologia della mesh all’interfaccia o la possibilità di mantenere l’accuratezza della soluzione. Per esempio la mesh generalmente creata in STAR-CCM+ è costituita da facce e celle poligonali mentre la maggior parte dei programmi agli elementi finiti lavora su elementi triangolari o quadrangolari di vari ordini e l'analisi CFD generalmente richiede densità di mesh molto più elevate.
Le tecniche di interpolazione sono basate sul metodo ai minimi quadrati o sul metodo delle funzioni di forma. La scelta del metodo dipende se all’origine i dati sono definiti su facce o su nodi.
Nel primo caso è utilizzato il metodo ai minimi quadrati, nel secondo, invece, si utilizzano le funzioni di forma.
3.6.2 Morphing
Lo spostamento di una struttura in un fluido richiede al solutore CFD di tener conto del cambiamento della forma e della posizione della struttura solida. In STAR-CCM+ questo problema è risolto attraverso diverse strategie.
Un metodo è quello per cui un problema di moto non-stazionario è convertito in un problema di tipo stazionario imponendo il movimento del sistema di riferimento su una mesh statica. La rotazione e la traslazione rigida possono essere simulate in questo modo. In questa maniera si sposta la mesh fluida come se fosse un corpo rigido, così tutte le celle mantengono la loro forma e la descrizione del movimento della mesh è definita dai vettori di spostamento e dagli angoli d’Eulero.
Un altro metodo, il morphing, richiede invece lo spostamento effettivo dei vertici della mesh in tempo reale, fattore indispensabile per analisi transitorie. Il morphing è la deformazione della griglia fluida muovendo i suoi vertici in modo da assecondare il moto della struttura solida e mantenere una qualità ragionevole della griglia fluida.
Questa operazione è spesso definita come “topologicamente costante”, in quanto, tutte le celle mantengono gli stessi “vicini”, ma la forma delle celle può cambiare nel tempo.
Le equazioni di trasporto nel fluido sono risolte per tenere conto di questo movimento arbitrario della mesh.
La tecnica di morphing utilizzata in STAR-CCM+ è chiamata Arbitrary Lagragian Eulerian (ALE), anche se questo tipo di tecnica è abitualmente associata agli elementi finiti piuttosto che ai volumi finiti. La parola “Arbitrary” deriva dal fatto che il moto dei vertici è arbitrario ad eccezione del fatto che deve assecondare il moto del contorno e deve garantire una qualità ragionevole della mesh.
STAR-CCM+ usa un modello di morphing multi-quadric basato sulle radial basis function per definire il movimento dei vertici all’interno della mesh.
Nel morpher il movimento iniziale imposto alla griglia è definito da un set di vertici di controllo. A ognuno di questi vertici è associato un vettore di spostamento, usato per muovere i vertici “vicini”. Attraverso la teoria dell’interpolazione multi quadrica, questi spostamenti sono usati per generare un campo d’interpolazione, estesa all’intera regione su cui agisce il morpher.
Quando questo campo è stato generato, viene usato per muovere i vertici della mesh nella loro nuova posizione.
Per generare il campo d’interpolazione, un sistema di equazioni viene creato usando i vertici di controllo e i loro spostamenti. A ogni punto di controllo è
associato un vettore 𝒅𝒅𝒊𝒊′ , che specifica lo spostamento del punto all'interno di un
singolo time-step, espresso come:
𝒅𝒅𝑖𝑖′ = ∑𝑁𝑁𝑖𝑖=1𝑓𝑓𝑏𝑏,𝑗𝑗�𝑟𝑟𝑖𝑖𝑗𝑗�𝜆𝜆𝑗𝑗 + 𝛼𝛼 (Eq.1)
in cui fb,j(rij) è una radial basis function: 𝒇𝒇𝒃𝒃,𝒋𝒋�𝒓𝒓𝒊𝒊𝒋𝒋� = �𝑟𝑟𝑖𝑖𝑗𝑗2 + 𝑐𝑐𝑗𝑗2 (Eq.2)
e 𝑟𝑟𝑖𝑖𝑗𝑗 è il modulo della distanza tra due vertici:
𝒓𝒓𝒊𝒊𝒋𝒋 = |𝑿𝑿𝑖𝑖 − 𝑿𝑿𝑗𝑗| (Eq.3)
In queste equazioni, 𝜆𝜆𝑗𝑗 è il coefficiente di espansione, 𝑋𝑋𝑖𝑖 è la posizione del
vertice 𝑖𝑖, N è il numero dei vertici di controllo, e
c
j è la costante della base. Ilvettore costante α è usato per soddisfare l’ulteriore vincolo: ∑𝑁𝑁𝑗𝑗 =1𝜆𝜆𝑗𝑗 = 0 (Eq.4)
che rende limitata l’espansione per le x grandi. Il sistema dato dall’Eq. 1 è non singolare se xi ≠ xj per i ≠ j.
Le Eq. 1 e 4 sono risolte per avere le componenti cartesiane di tutte le λj e i componenti del vettore costante α. Questo porta al campo d’interpolazione desiderato:
𝒅𝒅′(𝑿𝑿) = ∑ 𝑓𝑓
𝑏𝑏,𝑗𝑗(𝑟𝑟)𝝀𝝀𝑗𝑗 + 𝜶𝜶 𝑁𝑁
𝑗𝑗 =1 (Eq.5)
𝑓𝑓𝑏𝑏,𝑗𝑗(𝑟𝑟) = �𝑟𝑟2 + 𝑐𝑐𝑗𝑗2
𝑟𝑟 = |𝑿𝑿 − 𝑿𝑿𝑗𝑗|
Questa equazione può ora essere usata per muovere i vertici della mesh della quantità d’ cosi calcolata.
Le matrici che derivano dalle equazioni 1 e 5 sono dense e la loro risoluzione mediante operazioni lineari matriciali richiede un numero di operazioni
dell’ordine di N2.
Al fine di semplificare il problema sono stati sviluppati metodi che consentono di ridurre il numero di operazioni richieste mediante l’utilizzo del metodo del gradiente coniugato e di una particolare matrice di precondizionamento.
Se sono presenti più strutture solide nel fluido, la mesh viene distorta per conformarsi a queste strutture, ma quando due di esse vengono a contatto o arrivano ad essere molto vicine, la strategia del morphing può portare a celle di scarsa qualità.
Non è possibile usare il morphing tra due topologie di mesh molto diverse fra loro. In questo caso è possibile usare una strategia di re-meshing.
3.7 Co - simulazione tra Abaqus e STAR – CCM
La co-simulazione consente di accoppiare la simulazione in STAR - CCM+ con il solutore strutturale Abaqus, ottenendo una soluzione per l' intero modello. Questo tipo di procedura rientra nei metodi closely coupled in quanto il modulo di interfaccia è integrato all' interno dei codici.
Abaqus risolve il dominio strutturale e STAR-CCM+ risolve il dominio fluido. I due domini sono interconnessi usando SIMULIA Co-Simulation Engine (CSE). Con questo tipo di approccio la soluzione aerodinamica e quella strutturale avanzano contemporaneamente, scambiandosi le informazioni al termine di ogni time step.
Quando si ha lo spostamento meccanico del contorno, la tecnica di co-simulazione lavora in congiunzione con il morpher (motion model) per risolvere le equazioni del trasporto.