Stato Dell'Arte
1.1 Le Sospensioni
Sostanzialmente le sospensioni sono atte a:
1. assicurare l'assetto desiderato al motoveicolo nelle diverse condizioni di funzionamento e di fondo stradale;
2. consentire alle ruote di seguire il profilo stradale filtrando al pilota le accelerazioni verticali, obiettivo che concerne il comfort di marcia, cioè l'isolamento delle masse sospese da vibrazioni generate dall'interazione delle ruote con irregolarità stradali;
3. garantire l'aderenza delle ruote alla superficie stradale in maniera tale da trasmettere le forze di spinta e frenata richieste.
Le caratteristiche e le specifiche delle sospensioni sono, naturalmente, funzione dell'impiego tipico del veicolo che vengono ad equipaggiare: ad esempio nei veicoli da “cross” le sospensioni sono atte ad isolare la massa sospesa dai continui impatti conseguenti ai salti del mezzo, quindi tali sospensioni avranno escursioni maggiori rispetto quelle che equipaggiano veicoli da turismo o da strada, per questi ultimi in particolare, le sospensioni svolgono il compito
principale di garanzia di aderenza al suolo.
Nel settare l'assetto del mezzo è fondamentale tener conto della dipendenza dello stesso dalle rigidezze delle sospensioni, dal trasferimento di carico fra ruota anteriore e posteriore che avviene sia in accelerazione che in frenata, e dal carico che nei motocicli può essere molto variabile in quanto uno o due passeggeri con eventuale bagaglio introducono una variazione di carico elevata rapportata alla massa del solo motoveicolo.
Il dimensionamento della sospensione anteriore e posteriore di un motociclo, quindi delle sue caratteristiche di rigidezza, smorzamento e precarico, è un problema di non facile risoluzione a causa dell'influenza di numerosi parametri. Il peso del pilota e del motociclo, la ripartizione dei carichi fra le ruote, le caratteristiche di rigidezza e smorzamento dei pneumatici, la geometria del motociclo, le condizioni di impiego, il fondo stradale, la capacità frenante, la potenza disponibile, la tecnica di guida, sono solo alcuni dei parametri in gioco, è evidente come sia effettivamente difficile dimensionare delle sospensioni in grado di rispondere in maniera ottimale, al variare dei diversi parametri, che influiscono in modo più o meno predominante nella risposta della sospensione.
(a) (b)
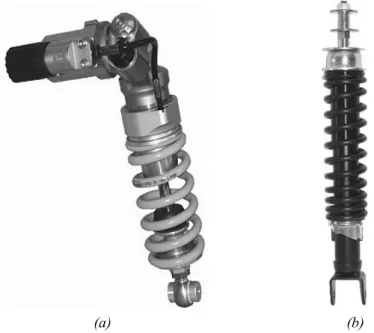
Si comprende, dunque, l'esigenza di dotare i motoveicoli di sospensioni regolabili con accuratezza in funzione del mercato per cui sono destinate, non a caso è possibile trovare sul mercato soluzioni più raffinate regolabili nel precarico molla, in altezza, in velocità di estensione e compressione (Fig. 1.1a), e prodotti con declinazione più commerciale regolabili semplicemente nel precarico (Fig. 1.1b).
Come si evince da entrambi gli elementi di Fig. 1.1, indipendentemente dall'uso per cui sono destinati, è consuetudine confrontarsi con sistemi le cui regolazioni vanno apportate manualmente, si rimanda quindi all'abilità, alla manualità e all'esperienza del proprietario del veicolo, l'adattamento delle sospensioni all'utilizzo che farà dello stesso. È piuttosto comune che l'utente medio, abbia solo una conoscenza di massima del proprio mezzo, e non si senta sufficientemente preparato per intervenire sulle regolazioni della sospensione, a discapito di un comportamento ottimale e, di conseguenza, del comfort e della sicurezza del mezzo.
(a) (b)
Fig. 1.2 – Sospensione Öhlins a controllo elettronico: (a) particolare sospensione, (b) centralina elettronica di controllo alloggiata nel codone della moto.
Come è successo da diversi anni per i produttori di automobili, il trend attuale dei produttori di sospensioni, in stretta collaborazione con le case motociclistiche, è di introdurre, su veicoli commerciali, sistemi sempre più evoluti per il controllo automatico o semiautomatico dei parametri delle sospensioni. Nel
mese di luglio 2008 è stata diffusa la notizia di sperimentazione di sospensioni
Öhlins a controllo elettronico su motocicli del campionato mondiale per derivate di serie SBK[29], sospensioni poi utilizzate durante le ultime tre date di tale campionato da uno dei piloti del Team Yamaha Italia. Osservando la Fig. 1.2(a), si possono notare i cavi di connessione di due step motor, alloggiati nella sospensione dove solitamente si possono trovare le meccaniche per la regolazione manuale delle dinamiche di estensione e compressione della sospensione stessa. I due step motor attuano, ad ogni step, un “click” del sistema classico di regolazione [2].
Questo sistema, evidentemente rivolto a specialisti e a un mercato di nicchia quale quello delle corse, non può ancora trovare sufficienti spazi sulle moto commerciali, principalmente per motivi di costi. Esistono tuttavia sistemi di controllo per sospensioni, come vedremo nel seguito di questo capitolo, già disponibili sul mercato, anche se solo per moto di fascia alta. Con l'obiettivo di rendere disponibili anche a utenti di motoveicoli di fascia bassa e medio-bassa sistemi di controllo elettronici che migliorino il comfort e la sicurezza del veicolo, il presente lavoro si propone di realizzare un sistema elettronico sensorless per la regolazione statica del precarico della sospensione.
1.2 Il Precarico
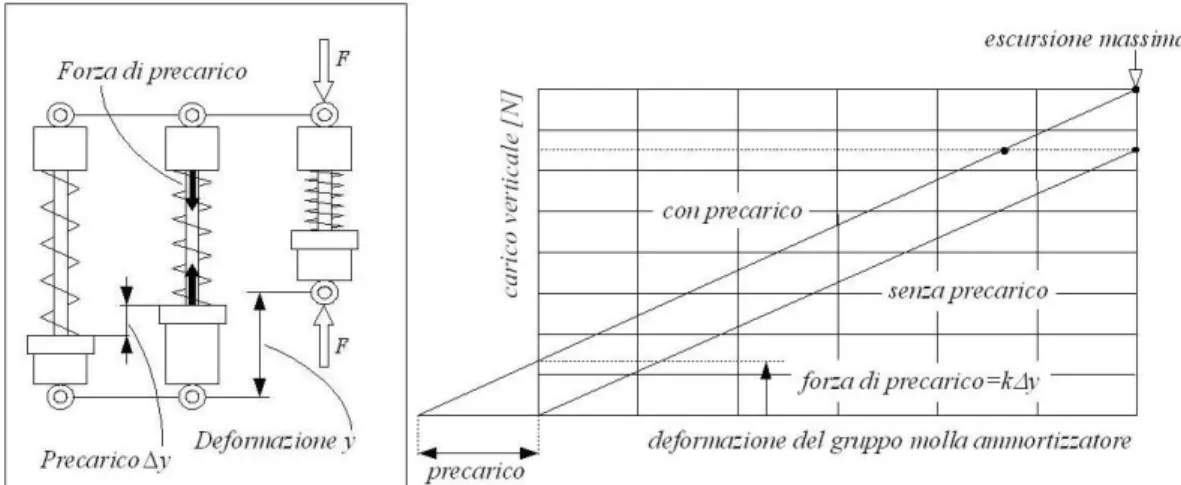
Una delle possibili regolazioni della sospensione è il precarico. Il precarico consiste in una precompressione della molla, se la molla viene sollecitata con una forza di entità minore o uguale a quella di precarico non si deforma. Il precarico molla può usarsi, dunque, per regolare l'assetto del motociclo a variare del carico.
Indicando con y la deformazione di precarico, si può esprimere la forza esercitata dalla molla, in presenza di precarico, come:
Fig. 1.3 – Caratteristica della sospensione al variare del precarico.
Altra peculiarità del precarico è limitare la deformazione in compressione del gruppo molla-ammortizzatore, per effetto del precarico occorre applicare forze maggiori per ottenere la massima escursione, o alternativamente a parità di forza applicata l'escursione sarà minore, come illustrato nel grafico in Fig. 1.3.
Con la regolazione di precarico si agisce inoltre sul massimo valore della corsa in estensione, da cui dipende la capacità della sospensione di seguire le imperfezioni “negative” dette comunemente cunette, cioè con un andamento al di sotto del piano stradale. Ciò può essere compreso meglio con riferimento alla Fig. 1.4, in particolare in Fig 1.4a è illustrata una sospensione con molla non precaricata il cui carico statico, la massa sospesa, comprime il gruppo molla-ammortizzatore di una quantità funzione della rigidezza della molla.
Si supponga idealmente che la massa sospesa, durante il moto di avanzamento, non risenta delle imperfezioni del fondo stradale, cioè rimanga ferma in direzione verticale. Allora, nel passaggio su di una irregolarità negativa, una cunetta, il gruppo molla-ammortizzatore deve potersi allungare di una quantità pari alla profondità della cunetta stessa, affinché la ruota possa seguirne il profilo, allungamento, e quindi profondità dell'irregolarità, che, nel caso di sospensione in assenza di precarico, può essere al massimo uguale al rapporto fra forza peso della massa sospesa e la rigidezza della sospensione.
Fig. 1.4 – Sospensione con molla (a) senza precarico, (b) precaricata.
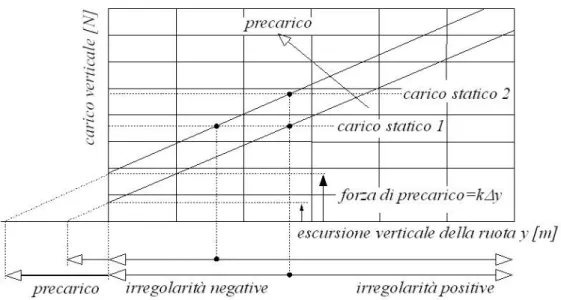
In Fig. 1.4b si illustra il caso di sospensione con precarico, in cui invece la massima elongazione del gruppo molla-ammortizzatore risulta minore, che del caso precedente, di una quantità pari proprio al precarico. Se ad esempio si precarica la molla di una quantità pari al carico statico, la ruota smette di seguire le irregolarità negative della strada. Ciò si evince anche dal grafico di Fig. 1.5 che
mette in luce come, a parità di carico statico, si riduca il settore dedicato alle irregolarità negative dell'escursione verticale della ruota, al crescere del precarico.
Fig. 1.5 – Caratteristica della sospensione al variare del precarico.
In definitiva l'obiettivo principale della regolazione del precarico statico della sospensione è quello di mantenere l'escursione della ruota, al variare del carico statico, più possibile simmetrica (Fig. 1.6).
1.3 Soluzioni per la regolazione del precarico
Per anni, e ancora oggi sulla maggior parte dei veicoli commerciali, si è rimandata alla perizia dell'utente del motociclo la regolazione del precarico. Per quanto riguarda questa regolazione, il trend degli ultimi anni è quello di dotare i veicoli di sistemi semiautomatici o automatici che assolvano l'utente da questa funzione.
Fra le case motociclistiche, Honda propone, per il modello Goldwing, una sospensione posteriore con precarico regolabile, sospensione prodotta dall'azienda statunitense Progressive Suspension. La sospensione della serie 460, agisce in maniera elettro-idraulica (Fig. 1.7), attraverso una pulsantiera di controllo con cui il pilota può impostare il precarico su due livelli memorizzati [14], [28].
Fig. 1.7 – Sospensione in dotazione su Honda Goldwing.
Sempre Progressive Suspension propone a catalogo delle sospensioni, dal nome Airtail e Airtail I.A.S., di tipo pneumatico, come suggerisce il nome, di cui il pilota può cambiare il comportamento azionando opportunamente un compressore fornito a corredo delle sospensioni stesse [28].
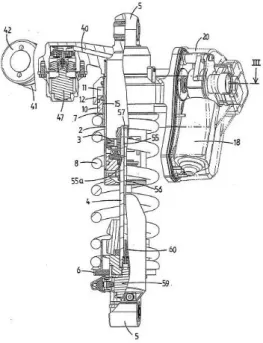
Fig. 1.8 – Sospensione WP Suspension con tre attuatori.
Il produttore di sospensioni WP Suspension, fornitore per motoveicoli BMW e KTM, produce una sospensione, secondo brevetto [18] riportata in Fig. 1.8, dotata di tre motori in corrente continua che fungono da attuatori per la regolazione rispettivamente del precarico (18 in Fig. 1.8), tramite sistema elettro-idraulico, e della apertura delle valvole che agiscono sulla velocità di compressione (47 in Fig. 1.8), e di estensione (59 in Fig. 1.8), della sospensione, in entrambi questi ultimi due motori l'attuazione avviene con sistemi puramente elettromeccanici.
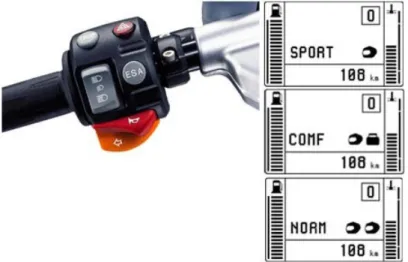
In base a quanto esposto nel brevetto, la sospensione può essere pensata parte di un sistema sia automatico, nel qual caso dovranno far parte del sistema di controllo opportuni sensori, che semiautomatico, come il sistema sviluppato in collaborazione con BMW, conosciuto con il nome ESA, sistema che consente, tramite pulsantiera posta ai comandi del motoveicolo, la regolazione su tre differenti livelli di precarico e tre differenti setting di funzionamento per la sospensione (Fig. 1.9).
Fig. 1.9 – Sistema ESA BMW basato su sospensione WP Suspension.
Trasversalmente, l'azienda italiana Marzocchi propone, presentata con brevetto [27], una sospensione posteriore (Fig. 1.10) in grado di regolare idraulicamente, in maniera automatica, tramite sistema di controllo dotato di sensori adatti al caso, o in modo semiautomatico, in base a quanto settato dal pilota con pulsanti ai comandi del veicolo, l'altezza della sospensione, senza però agire sulle altre grandezze caratteristiche della stessa. In base a quanto esposto nel brevetto Marzocchi, si varia la sola altezza della sospensione in virtù del fatto che tale intervento si ripercuote sul comportamento del veicolo spostado la posizione del baricentro, e di conseguenza la ripartizione dei carichi fra le ruote del mezzo. Un intervento sul precarico invece agirebbe anche sui parametri caratteristici della sospensione, oltre che sulla sua altezza.
L'azienda italiana Paioli, propone una coppia di ammortizzatori per maxi scooter in grado di aumentare il precarico molla in base al peso caricato su di essi (Fig. 1.11).
Fig. 1.11 – Coppia di ammortizzatori per maxiscooter Paioli.
Il sistema lavora attraverso un sensore, una centralina, un meccanismo elettroattuato, chiamato “precarica idraulica” e una coppia di ammortizzatori.
Detta sospensione sarebbe in grado di mantenere sempre in perfetto assetto l’altezza del retrotreno del veicolo indipendentemente dal peso su di essi caricato. Il prototipo (Fig. 1.12), denominato "Progetto per una Sospensione Autolivellante", si basa sul sistema idraulico detto, con parte meccatronica, è in grado di assorbire completamente le asperità trasmesse dalla strada, anche in condizioni di carico molto gravose, quali pilota, passeggero e bagagli, con la garanzia di controllo del veicolo, specie in fase di frenata. Il cinematismo del sistema, totalmente automatico, è stato escluso dal possibile intervento del pilota durante la marcia, ma è previsto un solo interruttore che permette di attivare o disattivare il funzionamento del sistema stesso [25].
Fig. 1.12 – Prototipo “Sospensione autolivellante” Paioli.
Le soluzioni finora esaminate adottano un sistema di attuazione misto, cioè in genere composto da un attuatore elettrico, in genere un motore in corrente continua che ben si presta vista la presenza sul veicolo dell'alimentazione DC a 12V, e da una o più connessioni di tipo idraulico e meccanico atte a trasmettere il moto e le forze esercitate dall'attuatore all'utilizzatore, la sospensione nel caso in questione.
Alcune aziende propongono, in alternativa a quanto citato, dei sistemi di attuazione privi di parte idraulica, con risultante maggiore complessità realizzativa delle soluzioni proposte, ma con tutti i benefici di affidabilità derivanti da un sistema privo di elemento idraulico.
In tale ambito Thyssen Krupp propone una sospensione con attuatore integrato [19] [20], come illustrato in Fig. 1.13, il motore integrato attua la regolazione del precarico della sospensione, attraverso una conversione del moto rotatorio in moto traslatorio. La sospensione viene proposta come parte del sistema EML (Electromechanical Leveling System), pensato per veicoli a quattro ruote con limitata potenza elettrica disponibile. Il sistema proposto integra, oltre una unità di controllo, sensori di elongazione e accelerometri al fine di regolare l'altezza del veicolo.