Capitolo 4
Sviluppo di algoritmi di sottocampionamento
del k-spazio per l’acquisizione rapida
di immagini cardiovascolari
4.1 Implementazione software
Si analizza adesso in dettaglio, commentandone le varie fasi, l’implementazione software eseguita usando come linguaggio di programmazione Matlab 6.5. Se ne presenterà il modello in asse corto del cuore, si effettueranno sulla sequenza di immagini trasformate varie forme di sottocampionamento,si applicherà ad esse il metodo Unfold che permette di eliminare il problema dell’aliasing successivo all’applicazione del sottocampionamento grazie a shift,tra un frame e l’altro,delle linee del k-spazio analizzate ,consentendo di avere con tutti e trenta frame la copertura del contenuto informativo di tutto il k-spazio.
Verranno proposti filtraggi appropriati atti a estrapolare ciò che per noi è il risultato voluto, si sommerà il rumore ricavato da stime su immagini reali ,si farà un confronto tra gli errori ottenuti in entrambi i casi concentrando l’attenzione sul rumore tipico della risonanza magnetica: il rumore di Riciano. Il riassunto dei passi affrontati nello sviluppo è presentato nel seguente schema a blocchi.
Schema a blocchi dell’implementazione software
Creazione del modello
Passaggio nel dominio di Fourier
Definizione del sottocampionamento
Sottocampionamento con metodo Unfold
Ritorno nel dominio dello spazio(IFFT)
Trasformazione monodim. nel dominio frequenziale
Filtraggio
4.1.1 Costruzione del modello
Si costruisce inizialmente il modello su cui effettuare successivamente le varie prove. Si tratta di una rappresentazione in asse corto della fetta media del cuore: in tale immagine statica
il miocardio ne rappresenta la corona esterna ,il ventricolo sinistro l’area interna ed infine il ventricolo destro la mezza luna laterale. Come è possibile vedere in questa rappresentazione si concentra l’attenzione sul comportamento dei ventricoli:anche se non è visibile l’azione atriale risulta comunque possibile dal comportamento ventricolare risalirne ad essa.
Si procede quindi alla rappresentazione dinamica del ciclo cardiaco costituito complessivamente da trenta frames di cui i primi dodici ne rappresentano la fase sistolica, caratterizzata dalla perdita di volume da parte del ventricolo sinistro conseguentemente alla contrazione per il pompaggio del sangue arterioso(arricchito di ossigeno e liberato dall’anidride carbonica in eccesso),dal cuore verso i vasi sanguigni ,e i rimanenti diciotto quella diastolica in cui si assiste al recupero di volume da parte sempre del ventricolo sinistro.
Si passa quindi nel dominio del k-spazio attraverso l’uso della trasformata bidimensionale di Fourier.
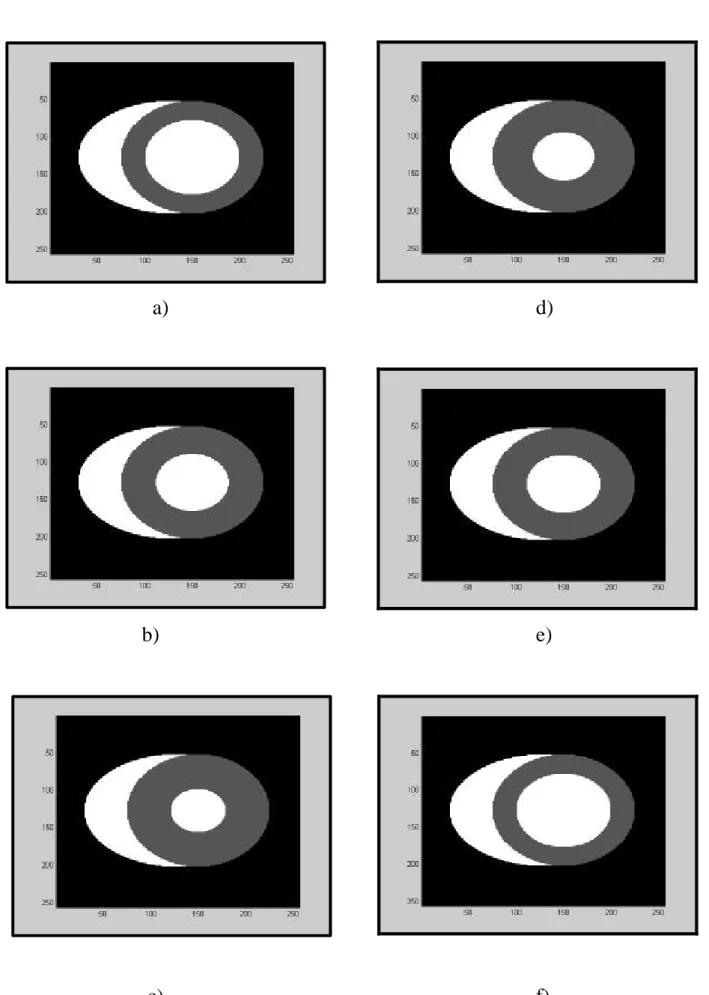
Presentiamo adesso in Figura 4.1 tre frame relativi a tre istanti diversi delle fasi sistolica e diastolica:
a) d) b) e) c) f)
Figura 4.1: a-b-c) Tre frame relativi alla fase sistolica. d-e-f) Tre frame relativi alla fase diastolica
4.1.2 Sottocampionamento
Vengono effettuate varie strategie di sottocampionamento sui vari frame del modello ’trasformato’. La prima utilizzata è stata quella di tipo lineare. L’applicazione di essa porta all’acquisizione alternativa, una riga si e una no,delle linee del k-spazio
La successiva è di tipo non lineare. Tenuto in conto che nel k-spazio la zona centrale contiene quasi tutta l’informazione necessaria si è preferito fare un campionamento più fitto in essa e più rado in quelle periferiche variando, a seconda della prova effettuata l’estensione, in termini di righe prese, del k-spazio analizzato.
L’obiettivo finale è quello di salvaguardare la qualità delle immagini ottenute malgrado la perdita del contenuto informativo.
Limitare l’analisi di esso ad un numero di righe concentrate in particolari parti ,se da un lato consente di apprezzare una diminuzione nella durata dei tempi di acquisizione dall’altro porta alla gestione di un nuovo problema:quello dell’aliasing (sovrapposizione spaziale del contenuto informativo).
Per l’eliminazione di tale ostacolo occorre prima dividere l’informazione concentrata in singoli voxel e poi selezionare, attraverso filtraggio opportuno, il contenuto desiderato.
Per la risoluzione del primo punto ci viene in aiuto il metodo Unfold già descritto dettagliatamente mentre la gestione del secondo punto viene ora affrontata
4.1.3 Il problema del filtraggio
Dopo essere ritornati nell’ambiente di lavoro iniziale per mezzo di una trasformazione inversa di Fourier, mediante trasformazione monodirezionale si è passati nel dominio frequenziale rendendo possibile l’applicazione di un filtraggio
di tipo temporale usato dal metodo UNFOLD per eliminare l’aliasing. In particolare dalle prove effettuate si è visto che il tipo di filtro che meglio risponde alle nostre esigenze appartiene alla famiglia dei filtri fir, ossia filtri caratterizzati da una risposta impulsiva finita e che presentano il vantaggio di poter avere in termini di fase una andamento di tipo lineare con la frequenza.
I filtri utilizzati, a prescindere dalla bontà dell’applicazione di ciascuno di essi sulla sequenza delle nostre immagini in movimento, sono di tipo numerico.
Sono state condotte prove con finestre come quella di Hanning, Bartlett, Hamming, Blackman, Kaiser. Nella tabella 4.1 si riassumono le varie caratteristiche dei suddetti filtri dove K= ? s rappresenta un fattore moltiplicativo che dipende dalla frequenza di campionamento del segnale.
Tabella 4.1
Da quanto si può evincere dalla tabella 4.1, la finestra rettangolare presenta una larghezza del lobo principale migliore rispetto alle altre, ma introduce maggiori distorsioni sulla stima dello spettro di Fourier a causa del valore di RR più elevato. La finestra di Hamming offre un buon compromesso tra l’avere un lobo centrale stretto e i lobi laterali bassi.
N=21 Larghezza lobo principale RR(dB) Riduzione lobi laterali(dB/ott)
Rettangolare 2? s/N -13 -6
Bartlett 4? s/N -25 -12
Hanning 4? s/N -31 -18
Hamming 4? s/N -41 -6
L’uso di tali filtri comporta la scelta del numero di campioni sui quali essi sono definiti. Si tratta di un problema da non sottovalutare poiché da tale scelta dipende la larghezza del lobo principale.
Numero di campioni e lobo principale sono legati da una legge che stabilisce una proporzionalità inversa tra entrambi. L’aumento dell’uno provoca infatti la diminuzione dell’altro.
Vanno presi in considerazione anche i lobi laterali che a loro volta dipendono da n il cui aumento decreta la diminuzione della larghezza del lobo con il conseguente aumento del valore di picco in modo tale che l’area sottesa resti costante. Ciò significa in altre parole che quando n aumenta le oscillazioni sulla risposta del filtro hanno una frequenza maggiore ma non diminuiscono in ampiezza.
Un modo empirico per ridurre l’effetto delle oscillazioni sulla risposta del filtro è quello di ridurre la discontinuità alla frequenza di taglio. Tale miglioramento si paga con un allargamento del lobo principale e quindi con una transizione meno ripida in corrispondenza della discontinuità con conseguente diminuzione della selettività del filtro.
Espresso in altri termini la larghezza del lobo principale della finestra in frequenza determina la selettività del filtro mentre l’ampiezza dei lobi laterali quella dell’entità delle oscillazioni.
Per caratterizzare le finestre in termini di quest’ultimo si introduce un nuovo parametro detto ‘Ripple Ratio’ (RR) dato dal rapporto tra la massima ampiezza dei lobi laterali e l’ampiezza del lobo principale il tutto moltiplicato per cento.
Dai risultati ottenuti si è riscontrato che la finestra di Hanning è quella che rispondeva meglio alle nostre esigenze di ricostruzione, in quanto le altre portavano alla formazione, sull’immagine finale analizzata, di una sorta di trascinamento dell’informazione contenuta sull’immagine precedente.
Finestra di Hanning.
Essa presenta la caratteristica di tendere a zero molto lentamente ed ha una forma del tipo w(n)=1/2[1-cos(2?n/N-1)] per n ? (0,N-1). In Figura 4.2 è riportato l’andamento del filtro utilizzato nell’implementazione, ottimizzato su un numero di campioni pari a 30.
Figura 4.2: Finestra di Hanning.
Dopo il filtraggio, è stata applicata al modello una trasformazione inversa nella terza dimensione. Si è dimostrato che benché il campionamento lineare offrisse una buona risposta non di meno era anche quello irregolare.Come aspettato si sono ottenuti infatti immagini di eccellente qualità.
4.1.4 Il rumore
Si sono compiute in seguito delle stime su un’ immagine reale precisamente ‘SAFIESTA-005-128-8619.dcm'.
Si è considerata una sottomatrice dell'immagine, parte periferica in alto, e di essa se ne è stimata la deviazione standard rappresentante il contributo di rumore rispetto all'informazione contenuta nella parte centrale dell'immagine per noi
quella di interesse. In essa si è valutato il valor medio. Si è stimato infine il rapporto segnale rumore (SNR).
Il rapporto segnale rumore di un sistema di imaging è un parametro fondamentale per la risoluzione spaziale, temporale e di contrasto. Il post-processing con il filtro passa basso convenzionale migliora l’SNR, ma rende sfocati i bordi. Il processo di eliminazione del rumore è ostacolato da statistiche di rumore non Gaussiane. Purtroppo si constata che l’ampiezza delle immagini di risonanza magnetica presenta un rumore di tipo Riciano. Quest’ultimo varia a seconda dell’SNR. Infatti con un SNR pari a zero ha un andamento simile alla distribuzione di Rayleight mentre il suo andamento approssima la distribuzione Gaussiana se l’SNR risulta maggiore di 5. Benchè le immagini anatomiche presentino un SNR superiore a 5, parti dell’immagine, quali per esempio i bordi, possono presentare un SNR locale minore di 5. Eliminare il rumore dalla parte reale e immaginaria dell’immagine, prima di effettuare la somma, potrebbe conservare i vantaggi relativi al SNR delle zone che presentano SNR maggiore di 5 e migliorare le performance di denoising delle locali aree con SNR minore di 5, consentendo di ottenere complessivamente prestazioni migliori. La gestione del problema del rumore viene affrontata in letteratura seguendo approcci diversi. Nel nostro caso, essendo risultato l’SNR superiore a 5 è stato possibile, semplicemente moltiplicando per il termine correttivo pari a 1.53 relativo al rumore di risonanza magnetica (rumore Riciano), ottenere dal SNR tipico della distribuzione gaussiana quello di Rician.
Si è generata una matrice di rumore bianco gaussiano delle stesse dimensioni delle immagini analizzate con deviazione standard calcolata precedentemente e si è sommato il rumore ai vari frame del fantoccio. Abbiamo infine riapplicato alle immagini finali le stesse trasformazioni e gli stessi tipi di campionamento usati sul modello di partenza analizzandone i risultati.
4.2 Sottocampionamento uniforme e stima dell’errore relativo
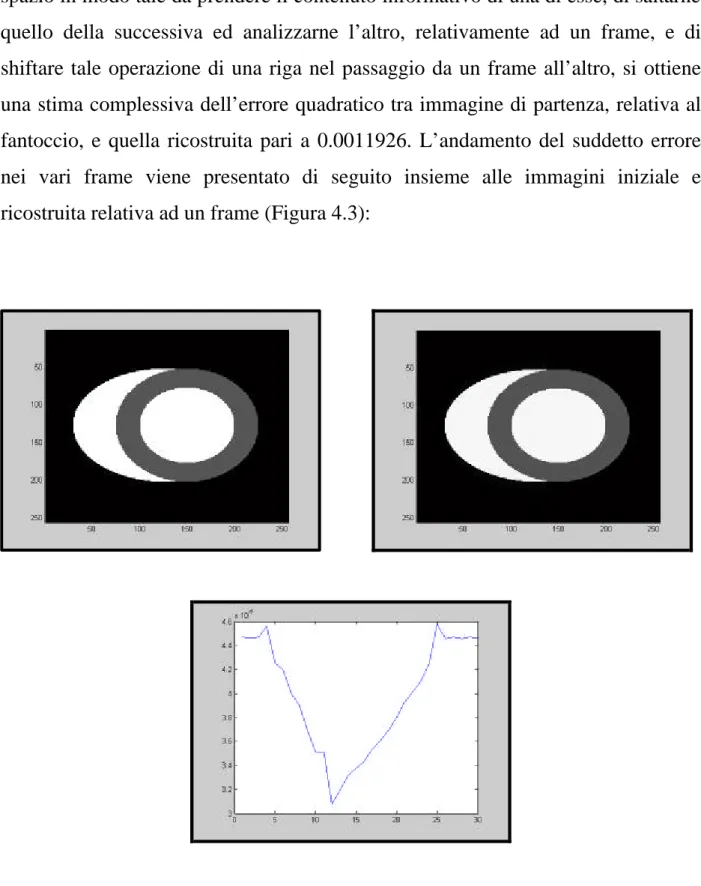
Usando un campionamento uniforme, consistente nell’acquisire le righe del k-spazio in modo tale da prendere il contenuto informativo di una di esse, di saltarne quello della successiva ed analizzarne l’altro, relativamente ad un frame, e di shiftare tale operazione di una riga nel passaggio da un frame all’altro, si ottiene una stima complessiva dell’errore quadratico tra immagine di partenza, relativa al fantoccio, e quella ricostruita pari a 0.0011926. L’andamento del suddetto errore nei vari frame viene presentato di seguito insieme alle immagini iniziale e ricostruita relativa ad un frame (Figura 4.3):
Figura 4.3: a)Immagine di partenza; b) Immagine ricostruita; c) Stima dell’errore sui vari frame.
4.3 Sottocampionamento non uniforme e stima dell’errore relativo
Si effettuano ora delle prove usando un tipo di campionamento detto non uniforme poiché con esso si fa una lettura del contenuto informativo del k-spazio in modo non regolare privilegiando cioè l’informazione contenuta in alcune zone rispetto ad altre.
Nelle prove eseguite, tenuta in conto la proprietà del k-spazio di concentrare alle basse frequenze quasi tutta l’informazione che servirà a dare nel dominio spaziale un immagine con buone caratteristiche di contrasto, su matrici di 256*256 si campionano le righe centrali con fattore di sottocampionamento pari a due, nel senso di considerare una riga e di escludere la successiva, mentre si effettua un campionamento maggiore nelle zone periferiche. Come c’è da aspettarsi il rumore dovuto all’errore quadratico medio complessivo tra le immagini di partenza e quelle ricostruite è, rispetto al campionamento uniforme, aumentato pur avvicinandosi tanto ad esso se si individuano zone ‘ricche’ in contenuto.
Occorre comunque fare le seguenti osservazioni che nascono da una verifica diretta sull’algoritmo creato per gestire il problema del campionamento. Si tratta di constatazioni che pur sembrando scontate, ci consentono di apprezzare la sequenza di istruzioni impostata.
Prendere un numero superiore di righe nella zona centrale con sottocampionamento di due, tra l’altro unico possibile al fine di scongiurare il problema dell’aliasing, comporta un errore complessivo inferiore, anche se talvolta un ugual numero di righe gestite può generare risultati diversi ai fini della stima dell’errore, in quanto il contenuto informativo risulta maggiore su alcune linee del k-spazio rispetto ad altre.
La diminuzione progressiva di linee considerate comporta, ai fini dell’errore relativo ai singoli frame, un cambiamento sostanziale dell’andamento del suddetto errore.
Ciò si verifica per le nostre immagini dinamiche qualora si centrano gli estremi della zona analizzata tra le righe rispettivamente centesima e centocinquantesima. Ridurre il range di interesse a così poche linee comporta inoltre una scarsa nitidezza nelle immagini ricostruite. Sempre dalle prove effettuate risulta possibile individuare la zona che detiene i migliori requisiti in termini di errori e di linee utilizzate. Si tratta del range centrato tra la cinquantacinquesima e la centosettantacinquesima linea.
Si è infine dimostrato che il progressivo aumento del campionamento nelle zone periferiche (quattro, otto, quindici, trenta) e addirittura l’eliminazione dell’informazione in esse contenuta, non comporta apprezzabili modifiche e che quindi risulta veritiera l’assunzione, presa per buona dalla teoria, del privilegiare alcune zone rispetto ad altre, per garantire ottime prestazioni sia temporali (si riducono i tempi di attesa dei risultati finali) che di risoluzione spaziale e di nitidezza di contrasti.
Vengono riportate altre esperienze relative al sottocampionamento della parte superiore del k-spazio. Nella prima viene analizzata, ottenendo scarsi risultati, una ristretta zona in alto non comprensiva dell’origine. La successiva prova ingloba tutta la zona superiore del k-spazio origine inclusa, ma anche in tal caso, benché si abbia un miglioramento notevole rispetto alla prova precedente, non si ottengono risultati eccellenti. Si può apprezzare un cambiamento aggiungendo alcune linee della zona sottostante.
Nel paragrafo successivo vengono presentate delle tabelle che riassumono i risultati ottenuti e alcuni grafici dell’errore sui vari frame.
4.4 Prove sul modello
Usando un sottocampionamento esterno di trenta e variando il numero di righe nella zona centrale si ottiene (Tabella 4.2):
Linee considerate nella zona centrale con sottocampionamento di 2
Numero totale di linee analizzate
Errore complessivo
calcolato su tutti i frames
60:190 130 0.001206 50:200 150 0.0012035 60:220 160 0.0012024 40:210 170 0.0012009 80:160 80 0.0012228 100:150 50 0.0013051 70:150 80 0.0012246 75:165 90 0.0012179 60:150 90 0.0012212 65:155 90 0.0012189 70:160 90 0.0012181 60:160 100 0.0012148 50:170 120 0.001209 45:165 120 0.0012096 55:175 120 0.0012089 55:225 170 0.0012016 Tabella 4.2
I valori relativi alle ultime due prove presenti in Tabella 4.2 sono quelli che per noi rappresentano un buon compromesso tra qualità dell’immagine e numero di righe analizzate.
In Tabella 4.3 vengono presentati i valori dell’errore relativi al modello:
Tabella 4.3
Come previsto, mantenendo il numero delle righe della zona centrale, prese simmetriche rispetto al centro del k-spazio, fisse e variando il campionamento nelle zone esterne si ottiene un aumento dell’errore totale all’aumentare del sottocampionamento esterno.
Righe nella zona centrale Sott.camp esterno di 4 Sotto.camp esterno di 8 Sott.camp .esterno di15 Sott.camp esterno di 30 Non si cons.le 2 zone esterne 78:178 0.0012072 0.0012113 0.0012134 0.0012145 0.0012161 68:188 0.0012033 0.0012065 0.0012081 0.001209 0.0012102 58:198 0.0012008 0.0012032 0.0012044 0.0012051 0.001206 55:225 0.0011986 0.0011999 0.0012006 0.0012016 0.0012016 48:208 0.001199 0.0012008 0.0012017 0.0012021 0.0012029 38:218 0.0011976 0.0011988 0.0011994 0.0011997 0.0012003 28:228 0.0011965 0.0011971 0.0011974 0.0011976 0.001198
Sottocampionamento nella zona centrale del k-spazio
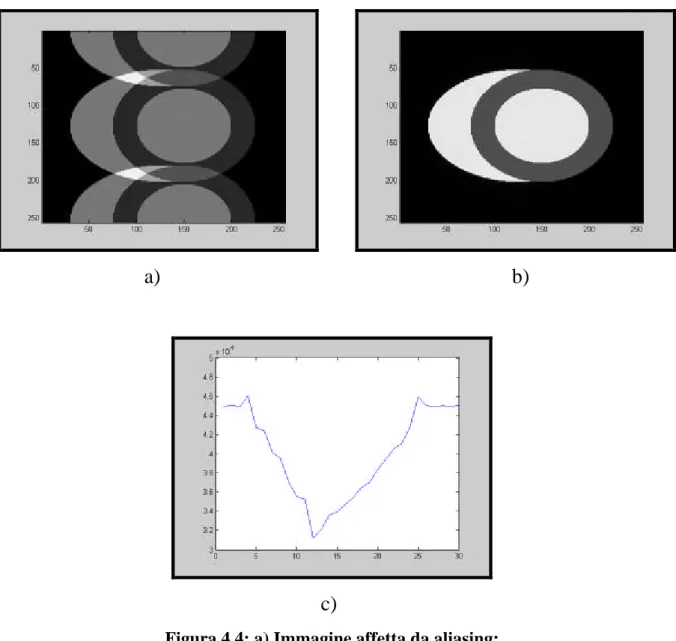
In Figura 4.4 sono riportati i risultati di un sottocampionamento corretto pari a due nella zona delimitata dalle righe (55, 225) e di trenta nelle zone periferiche del k-spazio.
a) b)
c)
Figura 4.4: a) Immagine affetta da aliasing;
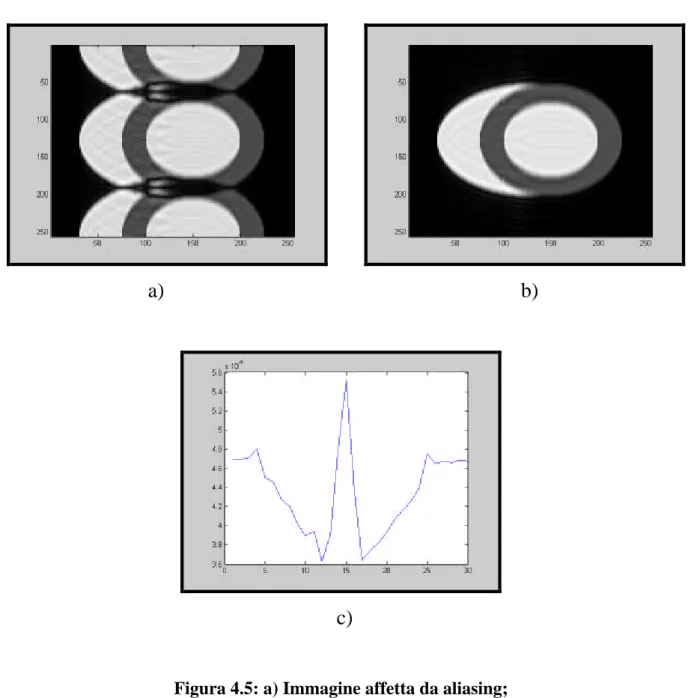
In Figura 4.5 sono riportati i risultati di un sottocampionamento non corretto pari a due nella zona delimitata dalle righe (100, 150) e di trenta nelle zone periferiche del k-spazio.
a) b)
c)
Figura 4.5: a) Immagine affetta da aliasing;
b) Immagine ricostruita; c) Andamento dell’errore sui frame
Come si evince dalla vista di quest’ultima figura l’aliasing generata dal sottocampionamento è rimossa solo parzialmente. L’immagine manca di nitidezza.
Tale situazione risulta maggiormente marcata se si pensa che essa appartiene ad una sequenza di immagini.
Sottocampionamento di tutta la parte superiore del k-spazio
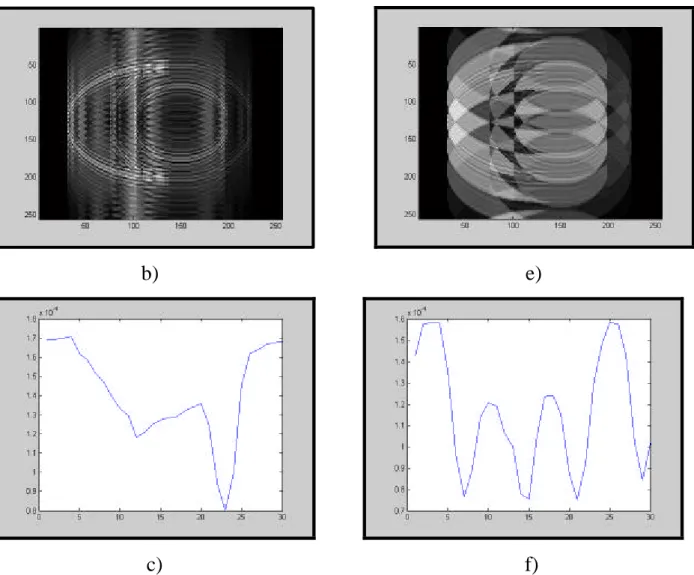
Se si esegue un sottocampionamento di due analizzando solo righe del k-spazio appartenenti alla parte superiore di esso (60, 90), escludendo la zona centrale e si applica un sottocampionamento, rispettivamente di trenta e di otto, nelle zone rimanenti, si ottengono ovviamente scarsi risultati.
Si presenta in Figura 4.6 l’esito finale di questa prova.
b) e)
c) f)
Figura 4.6: a) Immagine affetta da aliasing; b) Immagine ricostruita; c) Andamento dell’errore sui frame con sottocampionamento esterno pari a trenta; d) Immagine affetta da aliasing; e) Immagine ricostruita; f) Andamento dell’errore sui frame con sottocampionamento esterno pari a otto.
Sottocampionamento della parte superiore e in poche linee della parte sottostante del k-spazio
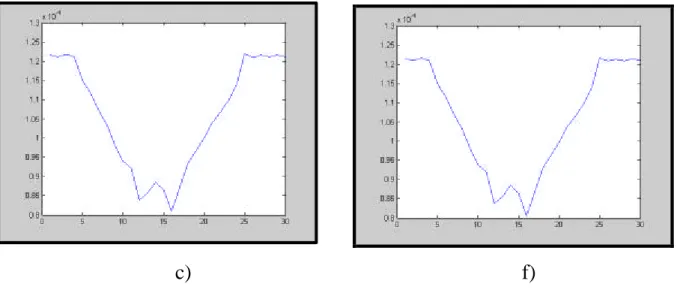
Si considera adesso un sottocampionamento di due nella parte superiore del k-spazio e di trenta e otto in quella inferiore. Mettendo in esecuzione il programma impostato si ottengono le seguenti immagini (Figura 4.7):
a) d)
c) f)
Figura 4.7: a) Immagine affetta da aliasing; b) Immagine ricostruita; c) Andamento dell’errore sui frame con sottocampionamento esterno pari a trenta; d) Immagine affetta da aliasing; e) Immagine ricostruita; f) Andamento dell’errore sui frame con sottocampionamento esterno pari a otto.
Sottocampionamento della parte superiore e in poche linee della parte sottostante del k-spazio
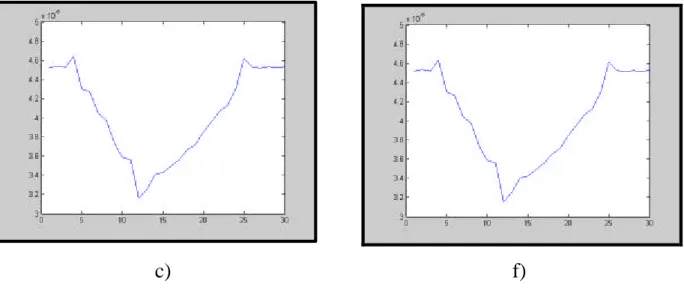
Si considera adesso un sottocampionamento di due nella parte superiore del k-spazio e in poche linee della parte inferiore, e di trenta e di otto nella parte rimanente. Mettendo in esecuzione il programma impostato si ottengono le seguenti immagini (Figura 4.8):
a) d)
c) f)
Figura 4.8: a) Immagine affetta da aliasing; b) Immagine ricostruita; c) Andamento dell’errore sui frame con sottocampionamento esterno pari a trenta; d) Immagine affetta da aliasing; e) Immagine ricostruita; f) Andamento dell’errore sui frame con sottocampionamento esterno pari a otto.
4.5 Prove con aggiunta di rumore
Nella Tabella 4.4 vengono presentati i risultati che si ottengono, relativamente all’errore quadratico medio, dall’analisi delle matrici generate dalla sovrapposizione del contenuto del modello ad una matrice che genera valori random, opportunamente moltiplicata per il fattore correttivo pari a 1.53 che ci consente di passare da una rappresentazione di tipo gaussiano del rumore a quella tipica della risonanza magnetica, il cosiddetto rumore Riciano. Riportiamo i risultati che si ottengono, proponendo prima nella Tabella 4.4 un confronto tra le varie forme di sottocampionamento a parità di linee del k-spazio usate e di rumore.
Tabella 4.4
Righe nella zona centrale Sott.camp esterno di 4 Sotto.camp esterno di 8 Sott.camp .esterno di15 Sott.camp esterno di 30 100:150 0.0012894 0.0012985 0.001303 0.0013057 70:150 0.00122 0.0012261 0.0012292 0.001231 75:165 0.0012163 0.0012213 0.001224 0.0012255 60:160 0.0012135 0.0012181 0.0012205 0.0012219 50:170 0.00121 0.0012135 0.0012153 0.0012164 60:190 0.0012089 0.0012119 0.0012135 0.0012145 50:200 0.0012069 0.0012092 0.0012103 0.001211 60:220 0.0012063 0.0012081 0.001209 0.0012096 40:210 0.0012054 0.001207 0.0012079 0.0012084
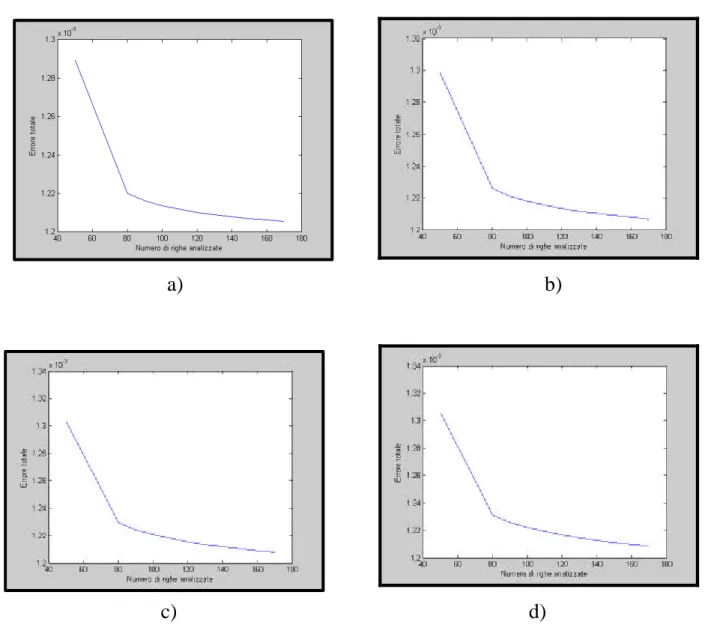
Tali valori, ovviamente differenti rispetto a quelli prima calcolati anche se non di molto, ci permettono di fare le medesime considerazioni esposte precedentemente. Riassumiamo nella Figura 4.9 gli andamenti del numero totale di righe analizzate rispetto agli errori per le varie forme di sottocampionamento:
a) b)
c) d)
Figura 4.9: a) Sottocampionamento di 4; b) Sottocampionamento di 8; c) Sottocampionamento di 15; d) Sottocampionamento di 30
Vengono adesso presentati in Tabella 4.5 le stime degli errori a parità di sottocampionamento e di righe analizzate, lasciando come parametro variabile il rumore che viene nell’ordine decrementato di due e incrementato di due e quattro.
Tabella 4.5
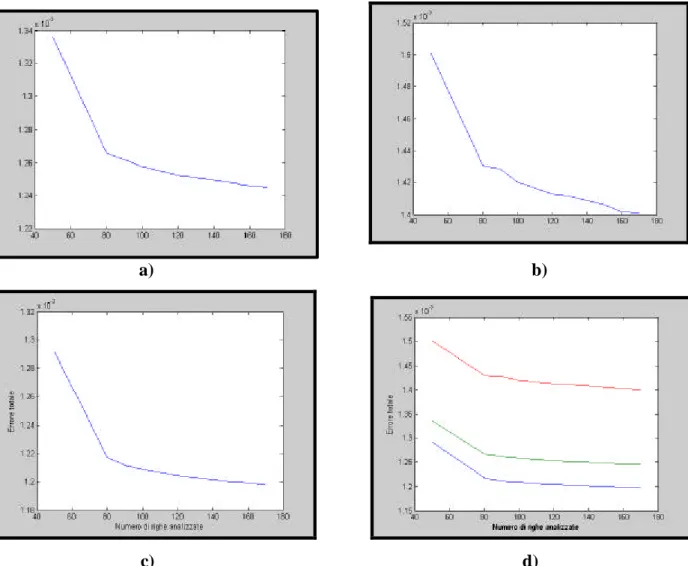
Riassumiamo nella Figura 4.10 gli andamenti del numero totale di righe analizzate rispetto agli errori relativamente al sottocampionamento esterno otto con l’aggiunta sul modello iniziale di un rumore che è rispetto a quello stimato sull’immagine reale due volte minore, due e quattro volte maggiore.
Righe nella zona centrale Sott.camp esterno di 8 Sotto.camp esterno di 8 Sotto.camp esterno di 8 100:150 0.0012914 0.0013359 0.0015008 70:150 0.0012171 0.0012659 0.0014305 75:165 0.0012119 0.001262 0.0014282 60:160 0.001209 0.0012577 0.00142 50:170 0.0012044 0.0012526 0.0014128 60:190 0.0012027 0.0012512 0.0014114 50:200 0.0012 0.0012479 0.001406 60:220 0.0011991 0.0012462 0.0014017 40:210 0.001198 0.0012454 0.0014014
a) b)
c) d)
Figura 4.10: a), b) andamenti del numero totale di righe analizzate rispetto agli errori relativamente al sottocampionamento esterno otto con l’aggiunta sul modello iniziale di un
rumore che è rispetto a quello stimato sull’immagine reale due e quattro volte maggiore c) sottostima di due del rumore aggiunto; d) grafico complessivo dei due andamenti
Presentiamo adesso in (Figura 4.11) tre frame relativi a tre istanti diversi delle fasi sistolica e diastolica comprensive di rumore di tipo Riciano:
a) d)
b) e)
c) f)
Figura 4.11: a-b-c) Tre frame relativi alla fase sistolica. d-e-f) Tre frame relativi alla fase diastolica
Nella (Figura 4.12) si raddoppia il rumore da sommare ottenendo su tre frame estrapolati: a) d) b) e) c) f)
Figura 4.12: a-b-c) Tre frame relativi alla fase sistolica. d-e-f) Tre frame relativi alla fase diastolica
4.6 Stima dell’errore sul modello
Vengono adesso proposti una serie di grafici nei quali si presenta l’andamento dell’errore totale rispetto al numero di righe analizzate. Ovviamente maggiore è il contenuto informativo analizzato e minore sarà l’errore totale prodotto. Nella Figura 4.13, viene considerato un sottocampionamento di quattro, otto, quindici, trenta nelle fasce esterne a quella analizzata con sottocampionamento di due.
a) b)
c) d) Figura 4.13: a) Sottocampionamento di 4; b) Sottocampionamento di 8; c)