Capitolo 8
Risultati delle simulazioni
8.1. Contenuti generali
L’analisi fluidodinamica è stata effettuata con entrambi i modelli, quello con piano di galleggiamento, ricostruito in Pro-Engineer partendo da varie sezioni dello scafo e quello acquisito proveniente dalla scansione ottica. Lo scopo delle simulazioni effettuate è la stima della resistenza all’avanzamento del kayak che risulta composta:
- dall’azione dell’acqua sulla superficie dello scafo (resistenza viscosa);
- dalla resistenza d’onda (“Wave making resistance”) ossia all’energia dissipata in fenomeni ondosi
I valori di resistenza viscosa sono stati ottenuti direttamente dagli strumenti di post-processing del codice di calcolo; i risultati legati al fenomeno di generazione delle onde sono stati calcolati eseguendo un bilancio di energia (vedi paragrafo)
8.2. Coefficiente di drag
Come già illustrato nel capitolo 7, il Coefficiente di drag (CD) è dato da:
S v D C rif D ⋅ ⋅ ⋅ = 2 2 1 ρ (8-1)
dove i significati dei vari termini sono gli stessi del capitolo precedente. Il termine S, che rappresenta la sezione frontale del kayak: esso indica l’area proiettata del kayak, corrisponde all’area massima del kayak proiettata in direzione del moto.
Ci sono due possibilità nella scelta dell’area frontale a cui fare riferimento nel calcolo del coefficiente: o si considera l’intero modello, oppure soltanto la parte di scafo sommerso. La prima scelta è da scartare poiché la zona superiore del kayak è stata tagliata semplificando il modello 3D.
Conviene quindi impiegare nel calcolo dell’area frontale solo la parte di scafo che si trova sotto la superficie di galleggiamento. Questo è in linea con la definizione degli altri parametri di impiego nell’ingegneria navale, come ad esempio il coefficiente di “Mid-ship Section” (dato dal rapporto tra la superficie bagnata e il prodotto fra profondità e larghezza calcolati sul piano di galleggiamento).
Il codice Fluent consente di effettuare il calcolo della superficie proiettata lungo x direttamente tramite la funzione di “Projected Surface Areas”, il cui menù è riportato in Figura 8.1.
Figura 8.1 – Calcolo dell’area proiettata S riferita alla parte sommersa del kayak.
Il risultato, in questo caso riferito al modello con piano di galleggiamento, pari 0.016 m2, è riferito a metà sezione frontale dell’intero kayak, poiché anche D è calcolato dal codice sulla metà di scafo riprodotto nella mesh.
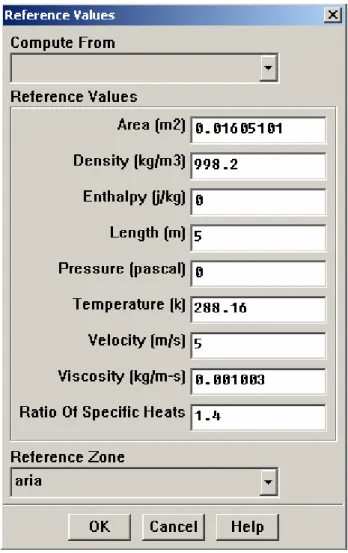
Una volta nota l’area a cui fare riferimento, è necessario aggiungere questo valore agli altri parametri di riferimento del problema, quali la densità, la viscosità e la velocità
dell’acqua, riassunti nello schema riportato in Figura 8.2 ed utilizzati dal codice per il calcolo del parametro adimensionale CD.
Figura 8.2 – Valori di riferimento.
Il parametro lunghezza (“Length”) è dato dalla lunghezza dello scafo misurata sulla linea di galleggiamento (“Length Water Line, LWL”) e la velocità è quella della corrente indisturbata. Per quanto riguarda i parametri termici, non è necessario apportare modifiche per questo problema.
A dimostrazione della differenza geometrica tra i modelli dovuta al processo di rielaborazione, i valori delle aree proiettate sono come riportato in Tabella 8.1.
Modello ricostruito Modello acquisito Area frontale zona acqua
[m2] 0.01627 0.01404
Applicando la Formula 8-1, è possibile quindi calcolare il valore del coefficiente di drag del kayak nei due modelli direttamente senza aver calcolato preventivamente la resistenza viscosa. Il coefficiente di drag è dato dalla somma di due componenti: quella di pressione (componente normale) e quella viscosa (componente tangenziale), legate da una relazione analoga alla 8-1 con le rispettive forze.
I valori dei coefficienti di drag sono riportati nella seguente Tabella 8.2. Coefficiente di pressione Coefficiente viscoso Coefficiente di drag totale Modello ricostruito 0.0454 0.1557 0.21 Modello acquisito 0.0639 0.2272 0.29
Tabella 8.2 – Valori dei coefficienti di drag nei due modelli.
La differenza fra i massimi valori calcolati con i due modelli è pari a 0.08. Questo valore è dovuto sia alla differenza di area frontale fra i due modelli, ma anche alla differenza fra le resistenze viscose e di pressione predette con i due modelli. Si noti che ai fini del calcolo del coefficiente di drag, il coefficiente di pressione in entrambi i casi rappresenta circa ¼ del valore globale.
8.3. Resistenza all’avanzamento
La resistenza totale all’avanzamento del kayak è dovuta principalmente a tre componenti: la resistenza viscosa, di pressione e quella dovuta alla generazione del moto ondoso (“Wave making resistance”). Di seguito si confrontano anche i valori ottenuti impostando un calcolo bifase laminare con quelli ottenuti dal turbolento.
8.3.1. Impostazione laminare bifase
Le resistenza viscosa e di pressione ricavate nel modello laminare sono riportate in Tabella 8.3. I dati riportati sono riferiti a metà kayak, per cui il valore complessivo è esattamente il doppio di quello presente in Tabella 8.3.
Forza di pressione Forza viscosa Forza totale
Modello ricostruito 7.8 N 0.95 N 8.8 N
Modello acquisito 4.8 N 3.8 N 8.6 N
Tabella 8.3 – Forze agenti su metà scafo nell’impostazione laminare del calcolo.
Si può notare come nel caso laminare le forze viscose mantengano valori molto bassi in entrambi i modelli.
L’impostazione laminare non è corretta: essa sottostima molto l’attrito fra le particelle di fluido e lo scafo con il risultato che le forze viscose sembrerebbero in questo caso quasi trascurabili.
8.3.2. Impostazione turbolenta bifase
La situazione cambia nettamente nell’impostazione turbolenta del moto, come si può osservare dai risultati riportati nella Tabella 8.4 (i valori sono riferiti solo a metà scafo).
Forza di pressione Forza viscosa Forza totale
Modello ricostruito 9.2 N 31.6 N 40.8 N
Modello acquisito 11.2 N 39.8 N 51 N
Tabella 8.4 – Forze agenti su metà scafo nell’impostazione turbolenta del calcolo.
I valori di entrambe le componenti della forza totale sono aumentati rispetto all’impostazione laminare. In particolar modo la forza viscosa ha subito un notevole innalzamento diventando quella dominante fra le due.
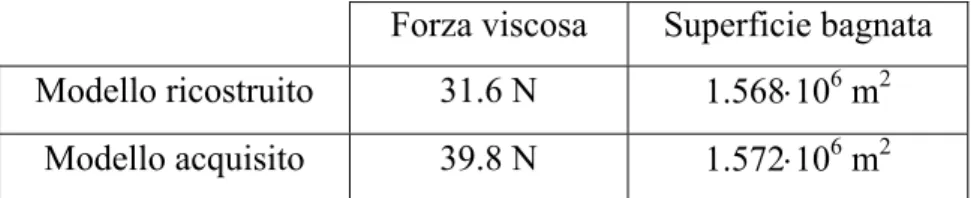
I valori della forza totale ottenuti con i due modelli si discostano di circa 10 N: la differenza fra i due valori è dovuta quasi esclusivamente alla componente viscosa in accordo con quanto asserito sulle differenti discretizzazioni del dominio di calcolo nei pressi del kayak. In Tabella 8.5 sono riportati i valori delle superfici bagnate calcolati in entrambi i modelli.
Forza viscosa Superficie bagnata
Modello ricostruito 31.6 N 1.568⋅106 m2
Modello acquisito 39.8 N 1.572⋅106 m2
Tabella 8.5 – Forze viscose e superficie bagnata nei due modelli.
Confrontando i valori della superficie bagnata si ottiene una differenza dell’ordine dello 0.3 %. Questo risultato conferma che la differenza fra le azioni viscose non dipende dalla geometria leggermente diversa fra i modelli (superficie bagnata) ma quasi esclusivamente dalla mesh effettuata.
In letteratura è disponibile una formula, derivata da Froude, che permette di stimare ragionevole la resistenza all’avanzamento di origine viscosa ( Equazione 8-2):
825 . 1 FSV R= (8-2) dove:
- F è una costante empirica che dipende dalla lunghezza dello scafo; - S è la superficie bagnata dello scafo (“wetted surface”) [m2]; - V è la velocità dell’imbarcazione [m/s].
I valori della costante F dipendono dalla lunghezza dello scafo e nel caso del kayak si assume un valore (da Tabella 8.6) pari a 1.736.
Lunghezza in metri F Lunghezza in metri F 5 1.736 120 1.421 10 1.604 140 1.415 20 1.515 160 1.410 40 1.464 180 1.404 60 1.457 200 1.399 80 1.437 250 1.389 100 1.428 300 1.386 Tabella 8.6 – Valori del coefficiente F in funzione della lunghezza dello scafo.
Per quanto riguarda invece la superficie bagnata si utilizza il risultato ottenuto sul modello 3D riportato nel capitolo 3. Sostituendo i valori nella relazione si ottiene un valore stimato della resistenza pari a (8-3):
5 . 51 825 . 1 = = FSV R N (8-3)
I valori stimati con i modelli numerici (acquisito e ricostruito) sono coerenti con questo risultato (differenze comprese fra l’1% e il 20%).
8.4. Resistenza dell’onda (“Wave Making Resistance”)
8.4.1. Introduzione ai fenomeni osservati
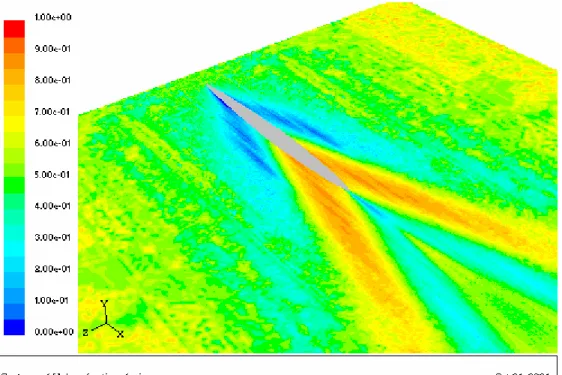
La Wave Making Resistance è dovuta alla dissipazione di energia sottoforma di energia potenziale di acqua che viene alzata inevitabilmente dallo scafo per crearsi un varco e procedere sul fluido. La manifestazione del fenomeno ondoso è osservabile qualitativamente in Figura 8.3 e 8.4. Gli strumenti di post-processing di Fluent permettono di visualizzare le onde tracciando la distribuzione delle fasi:
• sul pelo libero dell’acqua perturbato (e quindi del profilo ondoso) come superficie con concentrazione di fase costante.
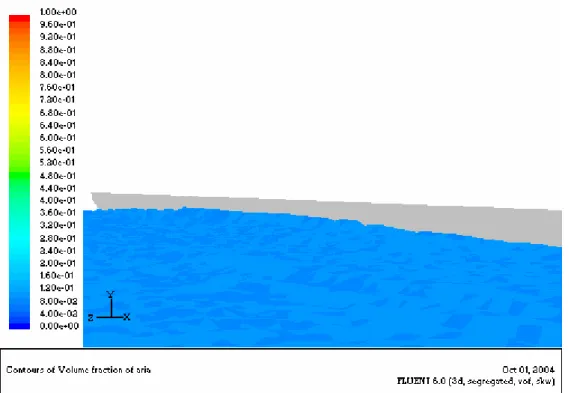
In Figura 8.3 è riportata la distribuzione delle fasi sul piano di galleggiamento statico. Il rosso (valore=1) rappresenta la zona su cui è presente la sola aria, mentre in quelle blu (valore=0) è presente esclusivamente la fase acqua. Nelle altre zone si ha un miscelamento fra le due fasi.
Figura 8.4 – Visualizzazione delle onde sul piano di galleggiamento statico.
La rappresentazione del moto ondoso in Figura 8.4 e successive è completa grazie ad un artificio di Fluent che consente effettuare uno “specchio” del modello rispetto al piano di simmetria.
Si osserva la presenza di due onde caratteristiche del kayak (indicate in blu): la prima è nella zona anteriore dello scafo (onda di prua), la seconda, più piccola, è situata nella zona posteriore (onda di poppa).
In Figura 8.5 è riportata la visualizzazione dell’onda del pelo libero dell’acqua, ottenuta creando una “ISO-SURFACE” ossia una superficie passante per tutte quelle celle aventi un valore pari a 0.05 di Volume fraction (cioè la superficie che passa per tutti quegli elementi che hanno un valore per la fase acqua pari a 95 %).
Figura 8.5 – Visualizzazione delle onde sul pelo libero.
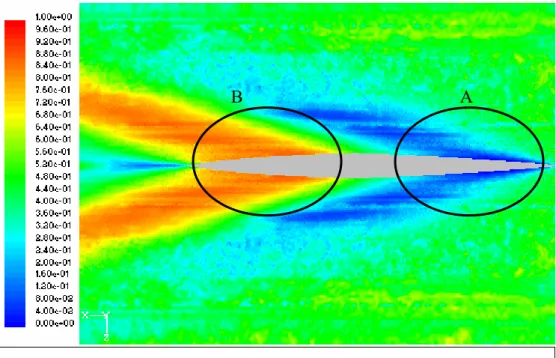
Si consideri in particolar modo l’onda di prua, che è quella più significativa nella generazione del moto ondoso e quindi nella Wave making resistance (Figura 8.6 e 8.7).
Figura 8.6 – Onda di prua, particolare. A
Figura 8.7 - Onda di prua, particolare (vista dall’alto).
Nelle immagini sopra riportate (vista isometrica, Figura 8.6 e vista dall’alto, Figura 8.7) sono state cerchiate le due zone del kayak dove si sviluppa l’onda di prua. Le zone, in colore blu, indica che le celle del piano di galleggiamento sono completamente riempite di acqua, ossia l’onda è nella fase “crescente”; e le zone in colore rosso sono formate da celle riempite di sola aria, corrispondendo alla “valle” dell’onda trasversale. La ragione intermedia assume gradazioni di colore che vanno dal celeste all’arancione, passando per una zona piuttosto estesa di verde. In questa parte il piano di galleggiamento sta tagliando appunto la zona di miscelamento (che rappresenta l’inevitabile dispersione tra una fase e l’altra).
E’ utile riprendere a questo punto il valore della “Hull Speed”, ossia la velocità alla quale la lunghezza dell’onda trasversale di prua è approssimativamente quella dello scafo (vedi paragrafo 2.3): il valore calcolato per tale kayak è di 2.85 m/s e la lunghezza dell’onda è esattamente uguale a quella dello scafo (Figura 8.8).
A B
In realtà il kayak si muove con una velocità di 5 m/s, maggiore della hull speed, e inoltre, la lunghezza dell’onda, calcolata nel capitolo 2, assume un valore molto maggiore: questo significa che l’onda si estende oltre la poppa dell’imbarcazione (Figura 8.9)
Figura 8.9 – Velocità maggiore della “Hull Speed”.
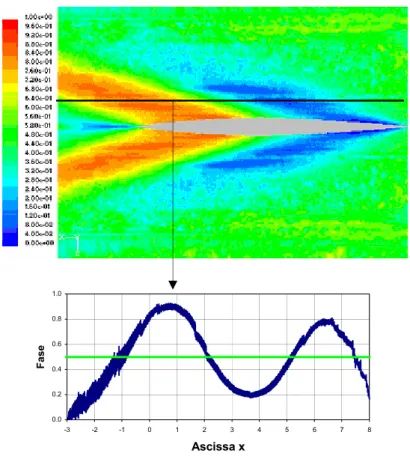
E’ utile per meglio vedere il profilo dell’onda, tracciare gli andamenti delle fasi sulla retta giacente sul piano di galleggiamento indicata in Figura 8.10.
0.0 0.2 0.4 0.6 0.8 1.0 -3 -2 -1 0 1 2 3 4 5 6 7 8 Ascissa x F ase
Figura 8.10 – Andamento dell’onda trasversale
Si osserva l’andamento sinusoidale (Figura 8.10) che è caratteristico della propagazione dell’onda. Le zone in blu rappresentano le creste dell’onda mentre quelle in rosso le valli.
Nelle Figure 8.11, 8.12 e 8.13 sono riportate le immagini relative al kayak e al pelo libero dell’acqua perturbato. Nella Figura 8.11 si vede la cresta dell’onda di prua.
Figura 8.11 - Vista Frontale (onda di prua)
L’onda generata dalla poppa è invece rappresentata in Figura 8.10.
In Figura 8.13 si osserva l’andamento dell’onda sullo scafo visto lateralmente: si assiste alla generazione di una cresta dell’onda nella zona di prua e una successiva valle in prossimità della poppa. In linea tratteggiata è stata individuata l’onda divergente di prua.
Figura 8.13 - Vista laterale posteriore (profilo dell’onda)
Tutte le immagini trattate fino ad ora sono riferite al modello con piano di galleggiamento. Nel modello acquisito, a causa dell’assenza di tale piano, si ha una zona di miscelamento abbastanza ampia e ciò non consente di visualizzare correttamente i fenomeni finora analizzati.
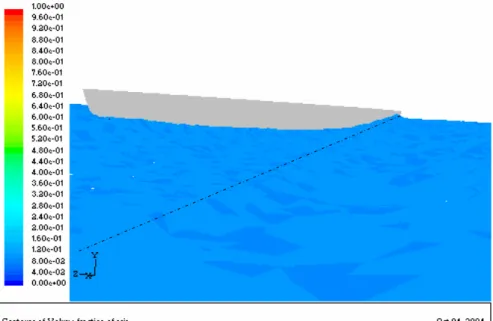
E’ possibile confrontare l’andamento delle fasi sullo scafo del kayak e sul piano di simmetria per il modello ricostruito e quello acquisito, riportati rispettivamente in Figura 8.14 e in Figura 8.15.
Figura 8.14 – Zona di miscelamento, modello ricostruito.
Figura 8.15 – Zona di miscelamento, modello acquisito.
Come si può notare dalle Figure 8.14 e 8.15, nel modello ricostruito l’estinzione della zona di miscelamento avviene entro la parte superiore dello scafo, mentre nell’altro modello,
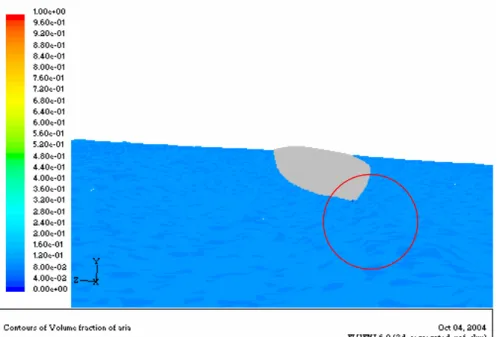
l’ampiezza di questa va ad interessare anche gli elementi sopra il kayak. Una situazione analoga si ritrova anche nella parte dello scafo sommersa (Figura 8.16 e 8.17).
Figura 8.16 – Parte sommersa, modello acquisito.
Anche nelle Figure 8.15 e 8.16 si può osservare il differente comportamento dei due modelli ai fini dell’ampiezza del miscelamento. Nella Figura 8.15 relativa al modello ricostruito, la porzione di scafo sommersa nella zona di prua (zona dove si genera l’onda e quindi l’acqua supera il piano di galleggiamento statico) è completamente circondata da sola acqua. Nella Figura 8.16 relativa all’altro modello si osserva la presenza di un certo miscelamento, con celle che nella zona di prua raggiungono percentuali di aria anche attorno al 12-15%.
Il fenomeno ondoso può essere visualizzato anche nel modello senza piano di galleggiamento, ma il pelo libero non viene rappresentato correttamente (vedi Figura 8.17) per la maggiore ampiezza della zona di miscelamento.
Figura 8.16 – Pelo libero perturbato, modello acquisito.
Infatti, se si osserva la gradazione cromatica nella scala delle fasi, mentre prima l’interfaccia assumeva valori di fase attorno a 0.05, qui si trova a circa 0.35, ossia le celle che identificano il pelo libero dell’acqua sono costituite per il 35% da aria.
In Figura 8.18 è rappresentato l’andamento delle fasi sulla superficie del kayak relativo al modello ricostruito.
Figura 8.17 – Andamento delle fasi sul kayak, modello ricostruito.
Si può notare come in questo modello il profilo dell’onda sullo scafo risulti essere ben marcato e assuma una sorta di andamento sinusoidale, con una cresta nella regione di prua e una valle nella zona di poppa.
8.4.2. Analisi quantitativa del WMR
Sono state proposte due soluzioni per il calcolo dell’energia dissipata nella generazione delle onde. La prima consiste nell’effettuare una stima dell’energia dissipata andando a calcolare l’energia potenziale che acquistano le particelle di acqua durante il moto dell’imbarcazione. La seconda invece è legata direttamente al bilancio di potenza fra ingresso e uscita.
8.4.2.1. Soluzione dell’energia potenziale
Assumendo l’energia iniziale nello stato di quiete (kayak fermo) pari a zero, una stima dell’energia dissipata si può ottenere calcolando l’energia potenziale delle particelle di acqua che sono passate al di sopra del piano di galleggiamento.
La formula classica dell’energia potenziale, con riferimento alla i-esima cella, è data da:
i i
pi m gh
E = J (8-2)
che, scritta per unità di volume diventa
i i pi gh E =ρ J/m3 (8-3) dove
- ρi è la densità dell’i-esima cella fluida [kg/m3]; - g è la gravità [m/s2];
- hi è l’altezza della i-esima cella rispetto al piano di galleggiamento [m].
La relazione (8-3) è stata scritta con riferimento alla cella i-esima per due motivi principali:
- ogni cella ha un suo volume diverso dalle altre e un’altezza diversa relativa al piano di galleggiamento;
- esiste una zona, anche se limitata (soprattutto nel modello con piano di galleggiamento), di miscelamento: questo implica che la densità degli elementi che si trovano in questa zona può assumere valori compresi fra la densità dell’aria e quella dell’acqua.
Per valutare l’energia dissipata, a questo punto basta calcolare l’integrale della quantità sopra riportata con riferimento al solo volume di aria, dato che interessa esclusivamente l’energia potenziale delle molecole di acqua che sono passate al di sopra del piano di galleggiamento. Si ha dunque:
∫∫∫
= Vi i i i tot ghdV E ρ (8-4)o meglio, dato che si tratta di elementi finiti, il risultato è dato dalla sommatoria riportata nella (8-5):
∑
= = n i i i i tot ghV E 1 ρ (8-5)dove (oltre ai termini già descritti in precedenza) Vi = volume della cella i-esima
n = numero di celle che si trovano al di sopra del piano di galleggiamento che presentano almeno una minima percentuale di acqua.
La formula però non è completa: infatti occorre inserire un parametro per individuare non solo le celle riempite completamente di acqua, ma anche quelle situate nella zona di miscelamento, che quindi hanno un valore della densità a seconda della percentuale di aria e di acqua presente.
Per far ciò, è possibile sfruttare la proprietà dei fluidi multifase nel codice di calcolo, tale per cui ad un fluido corrisponde un valore 1 (100%) e all’altro 0 (0%). In pratica l’idea è quella di aggiungere un coefficiente moltiplicativo alla sommatoria che tenga conto della percentuale in fase dell’i-esima cella.
In tutte le immagini riportate nel capitolo, si osserva che alla fase acqua corrisponde 0 e alla fase aria 1 (“Volume fraction of aria”). Un coefficiente moltiplicativo di questo tipo non è corretto, dato che porterebbe a valori elevati il risultato della sommatoria, essendo il volume superiore riempito esclusivamente da particelle di aria. Basta quindi invertire le due fasi, assegnando il valore 1 alle particelle riempite esclusivamente di acqua e 0 a quelle riempite di aria (“Volume fraction of acqua”).
Il risultato è il seguente: acqua n i i i i tot ghV vof E =
∑
⋅ =1 ρ (8-6)dove vofacqua è un numero compreso fra 0 e 1, dove 0 indica che la particella è costituita da sola aria (e quindi annulla tutte queste celle nella sommatoria) e 1 che invece è riempita interamente di acqua.
E’ possibile risolvere un integrale di questo tipo direttamente nel codice di calcolo, innanzitutto definendo la funzione (“Custom Field Function”) e dopo effettuare l’integrale sul volume di aria, sopra il piano di galleggiamento. L’impostazione della “Custom field function”) è riportata in Figura 8.18
Figura 8.18 – Definizione della funzione energia potenziale.
Da notare che l’altezza della cella i-esima è maggiorata di 0.1 metri dato che il sistema di riferimento del modello è posizionato ad un’altezza maggiore rispetto al piano di galleggiamento.
Una volta impostata la funzione, occorre effettuare l’integrazione nel volume della parte di aria. Per far questo il codice mette a disposizione un comando (“Volume Integral”) per effettuare l’integrale di volume della “custom field function” prima definita (Figura 8.19)
Figura 8.19 – Integrale di volume nella zona aria.
Il risultato che si ottiene rappresenta l’energia dissipata nella generazione del moto ondoso. Il dato ottenuto è quello riferito al modello con piano di galleggiamento, dato che il procedimento di calcolo può essere applicato soltanto a questo. Infatti la procedura richiede, nell’integrazione numerica, che i volumi aria e acqua siano distinti altrimenti non è possibile effettuare il calcolo.
Il valore ottenuto, 232 J, indica che metà scafo dissipa un’energia pari a questa quantità per spostare l’acqua nella configurazione di moto ondoso che è stata calcolata dal codice. Adesso occorre stimare la resistenza e per far ciò è necessario prima passare alla potenza dissipata nel processo.
Il problema è che non trattandosi di una simulazione transitoria, non è possibile stabilire a priori in quanto tempo si è generata tale configurazione di moto ondoso.
E’ possibile andare a stimare la velocità con cui si propaga l’onda una volta che è stata generata. La velocità di propagazione dell’onda non dipende dalla velocità dell’imbarcazione, ma è legata dalla seguente relazione14:
w w L V =1.25 (8-7) da cui si ricava 8 . 0 = = w w prop V L t s (8-8)
Il tempo di propagazione dell’onda risulta essere di circa 0.8 secondi, cioè il kayak, nell’avanzamento, dissipa il quantitativo di energia valutato attorno a 464 J in questo intervallo di tempo. E’ possibile quindi valutare la potenza, pari a:
580 = = prop t E W W (8-9)
Per vincere la resistenza dovuta alla generazione delle onde, occorre spendere una potenza pari a 580 Watt. Sapendo inoltre che il kayak procede alla velocità costante di 5 m/s, è possibile trovare un’analogia con la forza necessaria all’avanzamento:
116 = = kayak V W F N (8-10)
Il valore 116 N è la resistenza dovuta alla generazione delle onde.
8.4.2.2. Soluzione del bilancio di Potenza
Questa soluzione consiste nell’effettuare l’integrale sulla superficie di ingresso e sulla superficie di uscita della seguente quantità w, densità superficiale della potenza:
xi i i
i ghv
w =ρ W/m2 (8-11)
con riferimento alla cella i-esima. L’equazione proviene direttamente dalla derivazione dell’energia potenziale rispetto al tempo.
Integrando la (8-11) si ottiene il valore della Potenza
∫∫
= A xi i ighv dA W ρ W (8-12)∑
= = n i i i xi i A v gh W 1 ρ W (8-13) dove:- Ai è l’area della faccia della cella i-esima che si trova sulla superficie di ingresso o di uscita
- vxi rappresenta la velocità lungo x riferita alla cella i-esima.
Analogamente a quanto visto nel paragrafo precedente, anche in questo caso è conveniente moltiplicare l’equazione per la frazione di volume d’acqua, dato che la potenza è dissipata su questa fase.
L’equazione da inserire nella “Custom field function” (vedi Figura) è quindi:
acqua xi i i i ghv vof w =ρ (8-14)
Figura 8.20 – Definizione della funzione potenza.
La sommatoria relativa all’integrazione numerica diventa quindi
acqua n i i xi i ighv Avof W
∑
= = 1 ρ W (8-15)In Figura 8.21 è riportato l’impostazione del calcolo integrale di superficie relativo all’ingresso.
Figura 8.21 – Integrale di superficie calcolato all’ingresso e all’uscita.
I risultati ottenuti sono riportati in Tabella 8.7, con riferimento a metà scafo.
Superficie Potenza (Watt)
Ingresso -31666 Uscita -31944
Differenza (In – Out) 278
Tabella 8.7 – Potenze calcolate in ingresso e in uscita.
Si può ben notare come i valori siano negativi: questo è dovuto al termine “h” nella formula che rappresenta l’altezza del baricentro di ogni singola cella. Essendo il sistema di riferimento piazzato al centro della griglia, gli elementi sottostanti hanno valori negativi di h e quindi la potenza risultante è minore di zero.
Il valore ottenuto (circa 560 W per l’intero scafo) rappresenta la potenza che si deve spendere per vincere la resistenza dovuta alla generazione delle onde. Analogamente a quanto visto nel paragrafo 8.4.2.2, è possibile risalire alla forza richiesta, data da:
112 = = kayak V W F N (8-16)
Si noti che il valore trovato con questo metodo si discosta poco da quello ricavato calcolando direttamente l’energia potenziale delle onde (Equazione 8-10).
8.5. Risultati conclusivi
Le forze totali agenti sul kayak, ottenute sia con gli strumenti di analisi del codice, sia con i metodi energetici riportati nei paragrafi 8.4.2.1 e 8.4.2.1, sono riassunte in Tabella 8.8. La resistenza totale calcolata dagli strumenti di post-processing di Fluent è stata ottenuta come somma della resistenza viscosa e di pressione.
Forze agenti sul kayak Valore ottenuto dalle simulazioni
Resistenza viscosa 80 N
Resistenza di pressione 22 N
Resistenza totale (post-processing) 102 N
Resistenza totale (bilancio di potenza) 112 N Tabella 8.8 – Risultati finali.
La differenza fra i due valori è dell’ordine del 9 %.
Si consideri inoltre che i valori di resistenza calcolati indicano che la potenza richiesta alla velocità di 5 m/s è compresa fra 500 e 560 W. Tale valore è coerente con la potenza massima che un atleta può esercitare in una competizione agonistica.