CAPITOLO 5
Progettazione del Secondo Prototipo del Sistema di
Telemetria
5.1 Introduzione
Con i risultati ottenuti dal primo test in vivo, si chiude la fase di prototipazione “artigianale” del sistema, in cui sono stati definiti diversi aspetti relativi all’architettura del sistema di telemetria. In questo arco di tempo si sono anche resi disponibili i campioni richiesti per la realizzazione del secondo prototipo: in questa nuova fase, ogni circuito è stato implementato su PCB, sfruttando la fresa presente presso il laboratorio CRIM; i file di progettazione realizzati per la fresa sono comunque gli stessi che possono essere inviati direttamente ad una ditta esterna, nel caso si vogliano utilizzare supporti PCB in vetronite e adottare parametri dimensionali inferiori a quelli che sono stati utilizzati a causa dei limiti tecnologici imposti dalla macchina fresatrice.
Nella realizzazione dei nuovi prototipi sono stati mantenuti molti dei criteri precedentemente seguiti: soprattutto si è posta particolare attenzione all’ingombro del sistema, alla minimizzazione delle frequenze spurie rispetto a quella di trasmissione, alla creazione di un packaging biocompatibile adatto all’impianto per il test in vivo, che permettesse un corretto funzionamento dei sensori utilizzati e che fosse facilmente rimovibile in caso di guasto del sistema.
Le caratteristiche del nuovo rfPIC12F675F hanno inoltre permesso diversi tipi di programmazione, mentre dal punto di vista della ricezione è stata modificata l’interfaccia utente Labview per avere un migliore monitoraggio della seriale e dei dati rilevati.
Per quanto riguarda il modulo di ricezione, esso è stato progettato nella prima fase di lavoro e mantenuto anche per il secondo modulo.
Il prototipo progettato per la rilevazione della pressione intra-esofagea risulta infine caratterizzato dai seguenti parametri:
• frequenza della portante pari a 433.92 MHz;
• sensibilità di 0.3 mV/kPa quando il modulo viene alimentato a 3 V;
• dimensioni pari a 9 mm di larghezza e 17.8 mm di altezza; lo spessore risulta di circa 5.6 mm;
• massima velocità di conversione pari a 25 kSa/s, con una risoluzione di 10 bit;
• tre canali di ingresso analogici, in un range di 0÷3 V • una memoria EEPROM di 128 byte e una SRAM di 64 byte;
• sfruttando un bit rate di 2400 bps, il modulo impiega 4.218 ms per la trasmissione di un byte; per dare una stima della velocità di acquisizione, vengono considerati due casi limite:
o trasmettendo tutti i tre canali su 10 bit e con un solo byte di inizio trama, si ottiene una velocità di acquisizione pari a 26 campioni al secondo;
o trasmettendo un solo canale su 8 bit (trascurando i due bit meno significativi della conversione) e con un solo byte di inizio trama, si ottiene una velocità di 118 campioni al secondo;
o non bisogna trascurare inoltre la possibilità di eseguire una prima fase di acquisizione e memorizzazione dei dati nella memoria disponibile a bordo del modulo, seguita da un periodo di trasmissione; poiché la
EEPROM è caratterizzata da un tempo di scrittura pari a 5 ms, è stata
stimata una velocità massima di acquisizione pari a 200 campioni al secondo: considerando ogni campione su un solo byte, si può quindi pensare di memorizzarne 178, considerando che non tutti i byte della
SRAM potranno essere utilizzati per la memorizzazione dei campioni,
ed in seguito trasmetterli;
• per quanto riguarda la durata della batteria, si può anche in questo caso dare qualche stima, considerando di usare sempre una batteria CR1025 da 3 V con capacità di 30 mAh: lasciando il modulo in sleep e trasmettendo tre campioni diversi (un byte di inizio trama e uno per il dato valido) ogni 30 s si trova una durata della batteria pari a 8 giorni nel caso in cui si attivi la tensione di riferimento interna del comparatore, che consuma 100 µA di corrente; se invece si disattiva questo circuito e ad esempio si utilizza l’interruzione generata da un’eventuale variazione della tensione in ingresso a un pin (GPIO
interrupt), si può arrivare a una durata delle batterie pari a 27 giorni, a parità
di campioni trasmessi; se poi il numero di campioni scende a uno, si può arrivare ad oltre 100 giorni, con la possibilità di realizzare monitoraggi a lungo termine, ad esempio del funzionamento di sensori impiantati.
• alimentando il modulo a 3 V si ottiene una potenza di trasmissione di 5.623 mW, contro i 7.943 mW che si possono ottenere con una alimentazione di 5 V;
• infine, per quanto riguarda il rispetto delle normative, trattandosi del prototipo finale, si è preferito misurare la densità di potenza irradiata dal modulo con uno strumento portatile (8053, PMM), anziché basarsi solo su calcoli teorici; durante i test è stato misurato un valore massimo pari a Seq=30 mW/m2, che
5.2 Progettazione del sistema di acquisizione e trasmissione
5.2.1 Descrizione dei componenti elettronici utilizzati
Il risultato della seconda fase di progettazione del sistema di telemetria è la realizzazione di due prototipi che, pur mantenendo alcune caratteristiche di base (ad esempio il tipo di trasmissione e la frequenza), sono differenziati dal tipo di programmazione del microcontrollore e dalla presenza o assenza di alcune parti circuitali.
Alcune difficoltà sono state riscontrate nella scelta e nella ricerca dei componenti elettronici adatti, a causa dell’esigenza di ridotte dimensioni del sistema proposto: i componenti che da ultimo sono stati impiegati sono tutti di tipo SMD e l’utilizzo del microcontrollore rfPIC12F675F, ha permesso di ridurre notevolmente gli ingombri.
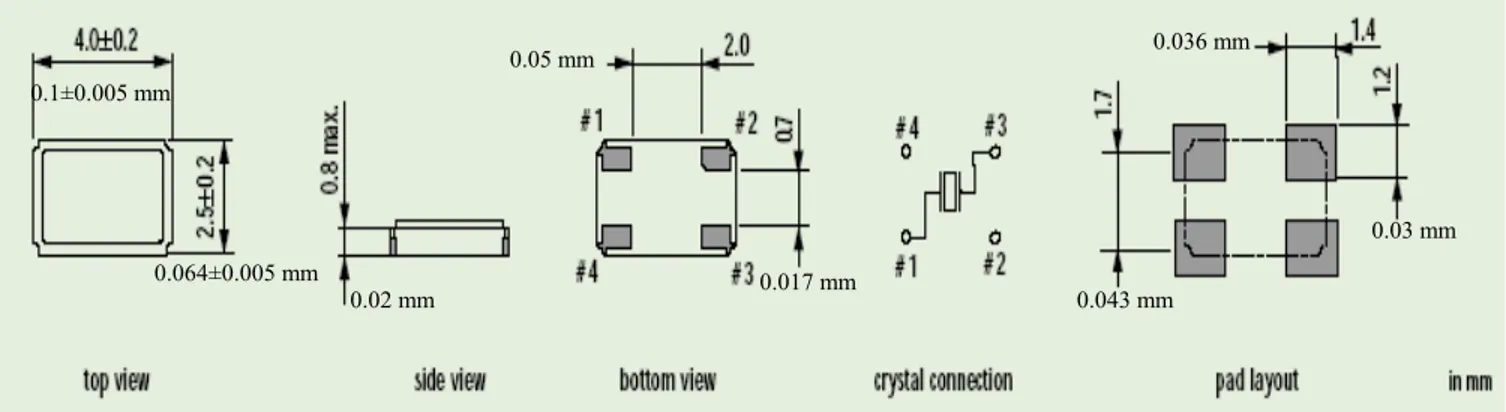
Il quarzo utilizzato per impostare la frequenza di trasmissione, comune ad entrambi i circuiti di trasmissione, è il nuovo componente SMD JXE42 di JAUCH (fig.5.1) [28]: per trasmettere alla frequenza di 433.92MHz è stata richiesta al momento dell’ordine una frequenza di taglio del quarzo pari a 13.56MHz, con una tolleranza (letta da datasheet) pari a ±20 ppm ÷ ± 30 ppm alla temperatura di 25 °C. In figura 5.2 vengono riportate (in mils e mm) le dimensioni di JXE42.
Fig. 5.2 Dimensioni del quarzo JXE42. 0.03 mm 0.036 mm 0.043 mm 0.017 mm 0.05 mm 0.02 mm 0.064±0.005 mm 0.1±0.005 mm
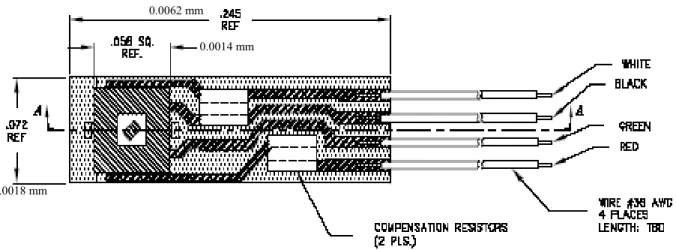
Per testare la bontà del sistema e raccogliere i dati sperimentali è stato utilizzato il sensore di pressione LL-3-072 di KULITE [29].
Si tratta di un sensore assoluto di pressione, miniaturizzato, con fondo scala pari a 103.42 kPa, adatto al range di misura in cui deve operare; il circuito di rilevazione della pressione del sensore si basa su un ponte di Wheatstone; l’uscita è proporzionale alla pressione rilevata ed il sensore, precedentemente calibrato dalla ditta di produzione, presenta una sensibilità pari a 0.9793 mV/kPa con una tensione di alimentazione di 10 V, un’impedenza di uscita nominale di 1 kΩ ed una risoluzione infinitesima, che risulta perciò limitata dal blocco di acquisizione: quello che si ottiene è una accuratezza di circa 40 Pa. In figura 5.3-A/B si riporta uno schema delle dimensioni (in mils e mm) del sensore.
Fig. 5.3/A Schema del sensore di pressione (vista frontale) LL-3-072. 0.0018 mm 0.0014 mm 0.0062 mm 0.0009 mm 0.00025 mm
L’uscita del sensore necessita di una amplificazione: a questo scopo si è scelto l’amplificatore da strumentazione AD620 di Analog Devices [30]: esso necessita di una sola resistenza esterna per settare il valore del guadagno in un range da 1 a 1000, secondo la formula
G R
k G=1+49.4 .
Fig. 5.4 Amplificatore da strumentazione AD620.
Per la realizzazione di uno dei due prototipi, è stato sperimentato l’uso dello switch magnetico TLE4913 di INFINEON Technologies [31], per attivare o disattivare il sistema di acquisizione e trasmissione. Si tratta di un sensore ad effetto Hall, integrato, caratterizzato da basso consumo di potenza (fig.5.5: la corrente di alimentazione è pari a 4 µA e sale per 50 µsec a circa 1mA durante l’attivazione del sensore da parte di un campo magnetico esterno).
Fig. 5.5 Andamento della corrente di alimentazione.
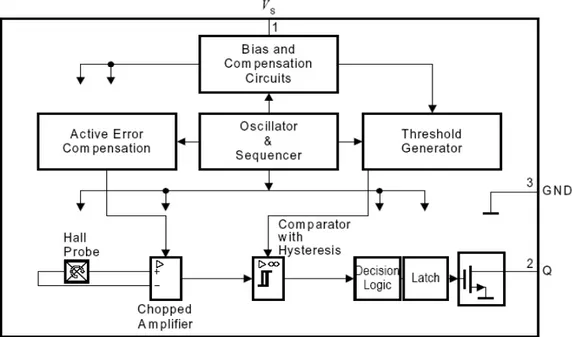
In figura 5.6 si riporta il diagramma a blocchi del TLE4913: si nota la presenza del sensore di Hall, dei circuiti di alimentazione e compensazione, di un oscillatore, di un
latch e di un transistor open-drain in uscita. I circuiti per l’alimentazione forniscono la
corrente al sensore ed ai circuiti attivi; il circuito di compensazione riduce gli effetti dovuti al cambiamento della temperatura o a differenze tecnologiche di produzione; il generatore di threshold e il comparatore assicurano l’accuratezza dei valori di soglia del campo magnetico con cui varia la tensione di uscita.
Fig. 5.6 Diagramma a blocchi dello switch magnetico TLE4913.
L’andamento della tensione di uscita Vq in funzione del campo magnetico applicato è riportato in figura 5.7:
5.2.2 Descrizione del microcontrollore rfPIC12F675F [25]
5.2.2.1 Introduzione
Per quanto riguarda la descrizione del rfPIC12F675, essendo questo il componente chiave del sistema progettato, si è preferito dedicare uno spazio separato dagli altri componenti.
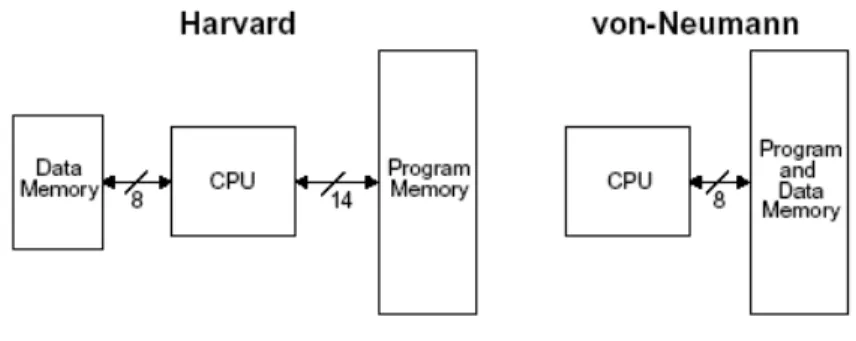
L’rfPIC12F675F si avvale delle caratteristiche che appartengono comunemente ai microprocessori di tipo RISC, tra cui un’architettura di tipo Harvard, un set di istruzioni ridotto e la possibilità di eseguirle in pipeline con uno schema a due livelli.
L’architettura Harvard prevede data memory e program memory separate ed accessibili tramite due diversi bus: il vantaggio rispetto all’architettura Von-Neumann (in cui la memoria è unica ed accessibile da un solo bus) è che ogni istruzione (ad eccezione delle istruzioni di salto) viene eseguita in un unico ciclo di clock (fig.5.8).
Come si può vedere dalla figura 5.9, l’esecuzione in pipeline delle istruzioni permette un flusso continuo di esecuzione del programma: se un comando infatti necessita più di un ciclo di clock, intanto viene iniziata l’esecuzione del successivo, fino al completamento di ogni istruzione in coda.
5.2.2.2 Organizzazione dello spazio di memoria
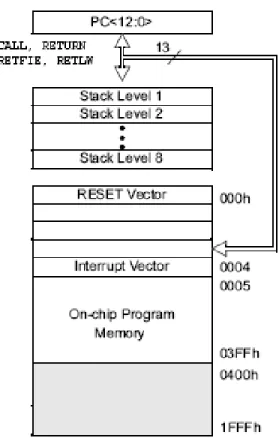
L’rfPIC12F675F è dotato di una flash program memory di 8Kx14 locazioni, indirizzabili tramite un contatore (Program Counter, PC) a 13 bit: soltanto le prime 1Kx14 (000h-03FFh) sono fisicamente implementate, perciò l’accesso ad una locazione superiore causa il ritorno alla prima locazione; come si vede dalla figura 5.10, il vettore di RESET e di INTERRUPT sono situati rispettivamente alle locazioni 0000h e 0004h: come si vedrà in seguito, il vettore d’interruzione contiene l’indirizzo della subroutine di interruzione che viene implementata via software.
Si nota dallo schema riportato in figura 5.11 che il microcontrollore ha una pila di memoria ad 8 livelli, perciò non è possibile avere più di 8 cicli annidati all’interno di un programma: infatti il program counter viene salvato in pila ad ogni esecuzione dell’istruzione call e la nona chiamata andrebbe a sovrascrivere il valore del program
counter della prima, che verrebbe irrimediabilmente perso.
Fig. 5.11 Descrizione del meccanismo di salvataggio in pila.
La data memory SRAM è divisa in due banchi di memoria, selezionabili tramite il bit
RP0 del registro STATUS. Le prime 32 locazioni di ogni banco sono occupate dagli Special Function Register (SFR): parte di questi registri viene utilizzata esclusivamente
dalla CPU (core registers), altri sono associati alle operazioni caratteristiche delle periferiche (peripheral registers); le locazioni da 20h a 5Fh implementano i General
Fra i core-registers, il registro STATUS contiene i bit di informazione della ALU (Arithmetic Logic Unit), dello stato di reset, del banco di memoria dati selezionato; il registro OPTION contiene vari bit di controllo e configurazione; i registri INTCON e
PIE1 permettono la gestione dei bit di abilitazione delle interruzioni; i bit del registro OSCCAL permettono di calibrare il circuito oscillatore a 4 MHz (aggiustando la
frequenza in modo da raggiungere effettivamente 4 MHz); i registri GPIO e TRISIO permettono di configurare i 6 pin di ingresso/uscita dati (General Purpose I/O pin, GPIO) scegliendo fra ingresso/uscita e tipo analogico/digitale.
È inoltre presente uno spazio di memoria EEPROM (128 byte) non direttamente mappato nello spazio dei registri, utile ad esempio per immagazzinare dati che subiscono frequenti up-dates: l’accesso alla EEPROM in lettura e scrittura avviene tramite quattro special function registers (EECON1,EECON2, EEDATA, EEADR).
5.2.2.3 Descrizione del modulo comparatore
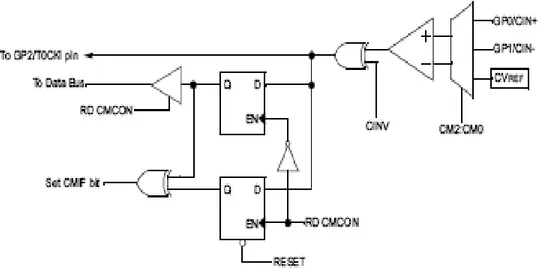
L’rfPIC12F675F possiede un comparatore analogico ed una tensione di riferimento
on-chip applicabile ad uno dei suoi ingressi (GP0 e GP1).
Fig. 5.13 Diagramma a blocchi del comparatore.
È possibile invertire la polarità dell’uscita del comparatore tramite il bit CINV
(CMCON<4>); inoltre essa può essere resa disponibile collegandola al pin GP2
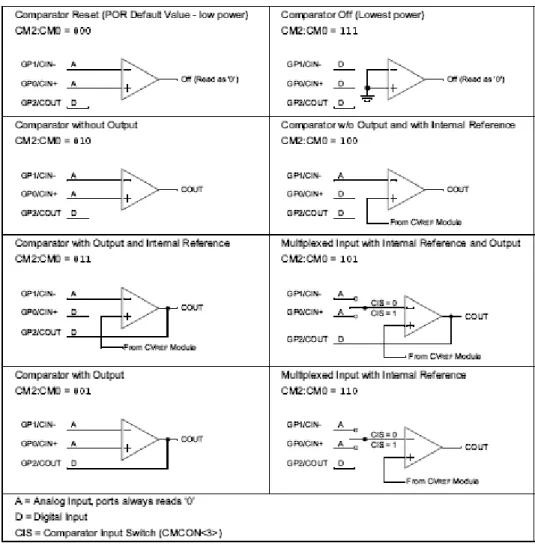
(fig.5.13); per configurare opportunamente questa periferica, si può scegliere fra 8 diverse modalità, illustrate in figura 5.14.
Fig. 5.14 Modalità di funzionamento del comparatore.
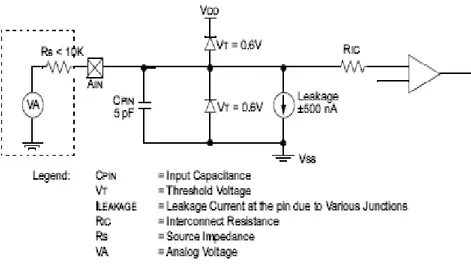
Alcune considerazioni devono essere fatte sugli ingressi analogici: come si vede in figura 5.15, poiché i pin analogici sono connessi ad uscite digitali, ci sono due diodi di protezione che mantengono la tensione di ingresso nel range Vss÷Vdd, nel caso essa superi di 0.6 V questi valori limite; inoltre è necessario porre attenzione all’impedenza di uscita delle sorgenti analogiche, che non deve superare un valore pari a 10 kΩ.
Fig. 5.15 Circuito semplificato per ingresso analogico.
Il circuito che genera la tensione di riferimento interna, permette di selezionare fra 32 distinti livelli di tensione (16 in un range alto e 16 in un range basso), determinati tramite le seguenti relazioni: ) 32 * 0 : 3 ( ) 4 ( : ) ( 0 * ) 24 0 : 3 ( : ) ( 1 Vdd VR VR Vdd CVref range high Vrr Vdd VR VR CVref range low Vrr + = − = = − =
Da queste formule si può vedere che non è possibile realizzare un range completo a causa del tipo di circuito utilizzato (fig.5.16): infatti la presenza dei transistori impedisce che CVref raggiunga i valori Vdd e Vss.
Fig. 5.16 Diagramma a blocchi del circuito per la tensione di riferimento.
Una osservazione importante merita il funzionamento del comparatore in caso di esecuzione dell’istruzione sleep: se precedentemente attivati, sia il comparatore che la tensione di riferimento interna rimangono attivi durante la fase di sleep, ed il comparatore stesso può essere utilizzato per inviare un’interruzione al microprocessore e riattivare il sistema; comunque, nel caso l’interruzione venga generata da altre periferiche, i registri di configurazione del comparatore non vengono modificati.
5.2.2.4 Descrizione del modulo convertitore A/D
L’rfPIC12F675F possiede quattro ingressi per la conversione di un segnale da analogico a digitale ; essendo il convertitore ad un solo canale, un multiplexer seleziona di volta in volta uno fra i quattro segnali di ingresso disponibili e lo invia al circuito di
Sample&Hold (S/H); l’uscita del S/H è collegata al convertitore A/D, il quale effettua la
conversione binaria attraverso approssimazioni successive e salva il risultato in un registro a 10-bit (ADRESL, ADRESH). La tensione di riferimento è selezionabile via software, con possibilità di scegliere fra la tensione di alimentazione Vdd oppure una tensione diversa applicata tramite il pin Vref (fig.5.17).
Fig. 5.17 Diagramma a blocchi del convertitore A/D.
L’operazione di conversione richiede un lasso di tempo pari a 11 volte Tad, dove con
Tad
tale frequenza deve essere selezionata, ur 1
in m
si intende la frequenza di clock del convertitore: per garantire un risultato corretto config ando opportunamente il registro ANSEL, odo da assicurare un TadMIN pari a 1.6µs.
In figura 5.18 viene descritto il modello per l’ingresso analogico, che permette alcune osservazioni: affinché il convertitore raggiunga l’accuratezza specificata, la capacità del DAC (CHOLD) deve caricarsi alla tensione del segnale analogico d’ingresso: il tempo di
carica del condensatore è influenzato sia dal valore dell’impedenza della sorgente RS che
dello switch RSS. Il massimo valore che RS può raggiungere è pari a 10 kΩ.
Fig. 5.18 Modello per l’ingresso analogico.
Il tempo minimo di acquisizione del segnale, assumendo l’errore massimo ammesso pari a LSB
2 1
T
Aper garantire la risoluzione specificata dal convertitore, risulta pari a:
19.72µs
CQ= .
5.2.2.5 Descrizione del modulo trasmettitore
L’rfPIC possiede integrato a bordo un trasmettitore UHF (Ultra High Frequency)
ASK/FSK (Amplitude Shift Key/Frequency Shift Key modulation) indipendente dal
microcontrollore. Esso è costituito da un oscillatore quarzato, un anello ad aggancio di fase (Phase Locked Loop,PLL), un amplificatore (Power Amplifier,PA) con uscita
open-collector e la logica di controllo.
Un oscillatore di Colpitts genera la frequenza di riferimento del PLL, determinata dal tipo di quarzo connesso esternamente. L’oscillatore controllato in tensione (Voltage
Controlled Oscillator,VCO), converte in frequenza la tensione presente sul pin LF e,
dopo averla divisa per 32, la confronta con quella di riferimento del quarzo: se risulta sfasata o di valore diverso dal riferimento, un circuito charge-pump corregge la tensione sul pin LF in modo da eliminare l’errore. In questo modo la frequenza di trasmissione
risulta pari a
f
f
*32RFXTAL
transmit = .
Il segnale in uscita dal VCO viene amplificato dal PA, la cui uscita pilota anche l’antenna di trasmissione.
Nella modulazione ASK, i dati vengono trasmessi variando l’ampiezza del segnale di uscita a radiofrequenza tramite il pin DATAask. Il circuito ASK tipico è mostrato in figura 5.20:
Fig. 5.20 Circuito ASK.
Il condensatore C1 può essere sostituito da un cortocircuito se il ricevitore ha una banda sufficientemente larga; se invece il ricevitore è molto selettivo, è necessario sostituire C1 con una capacità variabile per sintonizzare il trasmettitore sulla frequenza esatta.
Nella trasmissione FSK i dati vengono inviati variando la frequenza del segnale d’uscita. La deviazione di frequenza si ottiene caricando il quarzo con una ulteriore capacità, che spinge la frequenza di riferimento su cui si aggancia il PLL ad un valore leggermente inferiore: uno switch permette di collegare e scollegare questa capacità aggiunta, ottenendo due valori diversi di frequenza, che poi vengono moltiplicati per 32 per ottenere le effettive frequenze di trasmissione. La frequenza centrale, che non viene trasmessa, risulta pari a
2
f
f
f
MAX MIN C += mentre la deviazione risulta pari a
2
f
f
MAX MINf = −
∆ .
La modulazione FSK può essere implementata con i collegamenti di figura 5.21.
In figura 5.22 si riportano i valori di frequenza in relazione alle capacità C1 e C2 ed al valore assunto dal pin DATAfsk: quando DATAfsk si trova sullo stato alto, il pin FSKout è aperto e C2 non influenza il valore della frequenza; quando DATAfsk entra nello stato basso, FSKout viene cortocircuitato a massa e C2 va in parallelo a C1.
5.2.3 Progettazione del circuito di acquisizione e trasmissione
In figura 5.23 è riportato lo schema del circuito di acquisizione e trasmissione progettato:
Fig. 5.23 Schema del circuito di acquisizione e trasmissione ASK.
I pin VDDRF e VSSRF, forniscono rispettivamente alimentazione e massa, al
trasmettitore a bordo dell’rfPIC; essi risultano separati dai pin VDD e VSS, relativi invece
al microcontrollore. Per quanto riguarda l’alimentazione, si è scelto di utilizzare una batteria al Litio da 3 V CR1025.
Il trasmettitore viene pilotato dalla tensione in uscita dal pin GP5, collegato al pin RFEN: in particolare, l’oscillatore si attiva se in ingresso a RFEN si presenta una tensione alta; a questo punto il cristallo impiega 1.2 ms÷1.5 ms prima di iniziare ad oscillare, con un tempo di start-up minore all’aumentare della frequenza.
Il cristallo viene collegato al pin RFXTAL: poiché il ricevitore utilizzato è caratterizzato da una banda sufficiente larga, è possibile eliminare la presenza di una capacità trimmer in serie al cristallo.
Come detto prima, la frequenza di trasmissione ASK è pari a 32
*
f
f
transmit = RFXTAL ; i pin DATAFSK e FSKOUT, non essendo utilizzati, vengonocollegati al piano di massa.
Il pin LF è connesso internamente al microcontrollore ad un nodo del filtro PLL: in alcuni casi può essere necessario collegarlo a terra con una capacità. Con questo accorgimento si ottiene una riduzione delle frequenze spurie e della banda del filtro, con un aumento del rumore di fase: tipicamente questo pin non viene collegato e nel circuito è infatti flottante. Il pin master-clear MCLR (attivo basso) è collegato alla tensione di alimentazione per evitare un reset indesiderato del dispositivo.
La potenza di trasmissione può essere selezionata fra cinque diversi valori, tra +9 dBm e –70 dBm, variando la tensione sul pin PS (fig.5.24).
Fig. 5.24 Circuito per la selezione della potenza di trasmissione.
Come si vede dalla figura 5.24, il pin PS ha un generatore di corrente interno al microcontrollore e la caduta di tensione varia col valore di resistenza posto in serie a tale generatore; di solito è preferibile selezionare il livello di potenza più basso, per
La scelta dipende anche dal tipo di antenna utilizzato: un’antenna di piccole dimensioni risulta anche meno efficiente e rende necessaria una potenza maggiore, perciò, viste le dimensioni ridotte che il circuito deve avere, si è preferito operare con la massima potenza di trasmissione. Questo si traduce nel lasciare flottante il pin PS.
Poiché il piedino ANT a cui viene collegata l’antenna è di tipo open-collector, sono presenti elementi circuitale che fanno da pull-up a questo piedino: l’uscita deve essere alimentata in continua tramite un’induttanza collegata a VDDRF e l’impedenza del carico
deve essere adattata a quella di uscita dell’amplificatore per ottenere il massimo trasferimento di potenza.
I pin GP4 e GP0 vengono utilizzati come canali di ingresso del convertitore A/D e ad essi vengono collegati, tramite opportuni connettori, le uscite dei sensori utilizzati.
A seconda del tipo di programmazione utilizzato, il pin GP1 viene configurato in modo diverso, come ingresso del comparatore o come input digitale.
Per amplificare correttamente l’uscita del sensore di pressione scelto, è stato inoltre progettato un semplice circuito, riportato in figura 5.25:
Viene utilizzato l’amplificatore AD620, alimentato a +3 V e –3 V con due batterie al Litio, accoppiato con un potenziometro RG1 del valore di 10 kΩ, per ottenere la giusta regolazione del valore dell’amplificazione; anche il sensore di pressione viene alimentato a +3 V. Quando i due circuiti vengono collegati fra di loro, oltre a portare in ingresso al modulo A/D dell’rfPIC l’uscita dell’AD620, si fa in modo di avere un unico piano di massa comune ad entrambi i circuiti collegandoli insieme.
5.2.3.1 Progettazione dell’antenna
Per le applicazioni portatili a radiofrequenza in cui è necessario mantenere il circuito di trasmissione entro determinate dimensioni, è molto comune l’utilizzo di una loop
antenna (LA) rispetto ad antenne più efficienti ma ingombranti.
La loop antenna viene realizzata molto semplicemente sfruttando una traccia stampata su PCB, che viene accordata per risuonare alla frequenza desiderata. Il problema sta nell’adattare l’impedenza caratteristica dell’antenna con quella dell’uscita del trasmettitore, in modo da ottenere il massimo trasferimento di potenza ed un filtraggio armonico soddisfacente. Nella progettazione della loop antenna per il primo prototipo, è stata adottata la tecnica tapped inductor (in cui si realizza un accoppiamento a trasformatore), mentre nel caso dell’rfPIC12F675F viene utilizzata la tecnica tapped
capacitor [25].
La loop antenna è caratterizzata da un fattore di qualità Q elevato, che deve essere ridotto per rendere più semplice la sintonizzazione dell’antenna sulla frequenza desiderata: mettendo una resistenza in parallelo all’antenna si ottiene un Q più basso (fig.5.26).
Fig. 5.26 a) Loop antenna stampata su una PCB; b)Modello circuitale della loop-antenna; c)Trasformazione da resistenza serie a parallelo.
La resistenza di radiazione di una loop antenna di perimentro P≤0.3λ vale 4 2 4 320 λ π A
RRAD = , dove A è l’area (in m 2 ) del loop delimitato dalla linea che corre al centro della pista stampata, mentre λ è la lunghezza d’onda (espressa in metri).
Ponendo A=18 mm x 8 mm e λ=0.69 m (alla frequenza di 433.92 MHz), si ottiene RRAD=2.82 mΩ; supponendo che la larghezza della pista sia molto maggiore del suo
spessore, la resistenza di perdita della traccia si può calcolare come
w f l RLOSS 2 0 σ µ π = , con
l = perimetro della pista (considerando la linea centrale), w = larghezza della pista, σ = conducibilità del rame = 5.8E7 S/m, µ0 = permeabilità dell’aria = 1.256E-6 H/m;
assumendo w = 2 mm e l = 52 mm si ottiene RLOSS = 70 mΩ.
La resistenza serie totale si ottiene come somma di RRAD e RLOSS con le resistenze di
perdita (Rp) delle capacità utilizzate per realizzare l’adattamento di impedenza:
; l’efficienza di radiazione dell’antenna risulta pari a p LOSS RAD S R R R R = + + S RAD R R R = η ;
in UHF, Rp solitamente vale da 0.2 a 0.6 Ω: si ottiene ηR = 2E-3, un valore molto piccolo.
Per selezionare il valore di capacità utile, è necessaria una stima del valore di induttanza associato alla loop antenna; una accuratezza del 95% si può ottenere dalla
seguente formula: = lw A l L *ln 8 2π µ
; con i parametri precedenti si ottiene L = 25 nH; il valore di capacità associato è
L f 2 2 4 1 π =
C , che in questo caso è pari a 5.4 pF. Per
calcolare l’impedenza dell’antenna bisogna passare da resistenza serie a parallelo: per prima cosa si calcola
S R
fL
Q= 2π = 53, poi il valore dell’equivalente parallelo =3.6 kΩ, che è un valore maggiore dell’impedenza di uscita del trasmettitore, pari a circa 300 Ω; quando L e C risuonano alla frequenza di trasmissione,
) 1 ( 2 +
=R Q
Per ridurre il valore di Rpp si inseriscono due condensatori come mostrato in figura
5.27 :
Fig. 5.27 Adattamento di impedenza con tapped-capacitor.
In questo modo l’impedenza dell’antenna risulta ridotta di un fattore pari alla distanza del punto d’inserzione (tap point); a questo punto per ottenere il massimo trasferimento di potenza bisogna fare in modo che l’impedenza di uscita dell’amplificatore che pilota l’antenna e dell’antenna stessa siano uguali. Risolvendo il circuito alla frequenza di risonanza, si ottiene in RPP
C C C Z 2 2 1 1 + = ;
combinando le equazioni precedenti si trova: S in S in R Z f C C L f R Z f L f C π π π π 2 1 1 4 1 2 4 1 2 2 2 2 2 2 1 = − = = − =
Svolgendo i calcoli si ottiene C1=7.5 pF e C2= 18.8pF.
Date le esigenze di ridotte dimensioni del circuito, la loop antenna progettata con tali parametri è risultata comunque ingombrante e caratterizzata da un basso valore di efficienza: perciò è stata utilizzata un’antenna ad elica, in quanto ha caratteristiche migliori dal punto di vista dell’efficienza, inoltre, grazie alla sua struttura, è più semplice da alloggiare all’interno del modulo di trasmissione e meno ingombrante (fig.5.28).
Fig. 5.28 Antenna ad elica.
Per questo tipo di antenna, valgono le seguenti relazioni:
2 4 2 2 20 r N R S RAD = λ π π
+ = pelle prossimita cond C S loss R R f r r N R 0 1 ' σ µ π
dove rc è il raggio del conduttore utilizzato, f è la frequenza di trasmissione, σcond è la
conducibilità del conduttore, Rprossimità è la resistenza ohmica dovuta alla prossimità tra
due spire adiacenti e Rpelle è la resistenza dovuta all’effetto pelle.
I vari prototipi sono stati realizzati con conduttori schermati, dunque con Rprossimità=0:
in queste condizioni la Rp si riduce a C cond S loss f r r N R σ µ π 0 =
. Questi parametri servono non solo per stabilire l’efficienza dell’antenna, ma anche come parametri per adattare in modo corretto l’antenna, per ottenere il massimo trasferimento di potenza.
Anche questo tipo di antenna è caratterizzato da un elevato Q, perciò ha una banda abbastanza stretta, inoltre le spaziature della bobina influiscono notevolmente sulle sue performance.
Il numero di spire della bobina dipende dalle dimensioni del filo conduttore utilizzato, dal diametro della bobina e dalla distanza fra le spire; il numero di spire può essere determinato in modo empirico partendo da una bobina di lunghezza sovradimensionata e accorciandola finché non risuoni alla frequenza desiderata; l’antenna può essere sintonizzata anche aumentando o diminuendo la sua lunghezza, ossia la spaziatura fra le spire.
Per trasmettere a 433.92MHz, ad esempio, servono 17 spire fatte con filo di rame smaltato di 1mm di diametro avvolte con un diametro di 5mm; la lunghezza totale dell’antenna è in questo caso di 30mm.
5.3 Modalità di funzionamento e programmazione
dell’rfPIC12F675F
5.3.1 Introduzione
Nella fase di programmazione del dispositivo, si è cercato di sfruttare le caratteristiche offerte dal microcontrollore e dalle periferiche disponibili, per verificare la possibilità di migliorare le funzionalità del prototipo, tramite alcuni accorgimenti. Ogni algoritmo è stato pensato per utilizzare la capacità dell’rfPIC di porsi in uno stato di basso consumo di potenza (Power Down Mode), per poi essere riattivato in seguito ad una interruzione proveniente dal tipo di periferica selezionato: a tal fine sono stati utilizzati il modulo watchdog, la porta GPIO ed il comparatore, che rimangono attivi anche durante la fase di sleep; le interruzioni che provengono da questi sottosistemi provocano la continuazione del programma in esecuzione, senza causare un reset e relativa perdita delle impostazioni dei vari registri.
In figura 5.29 viene riportato uno schema della logica di controllo del meccanismo di interruzione: si vede chiaramente che il bit GIE (global interrupt enable) del registro
INTCON deve essere a 1 per permettere l’esecuzione di qualsiasi tipo di interruzione.
Per la programmazione del microcontrollore viene utilizzato un set di istruzioni assembler: ogni istruzione viene eseguita in un ciclo pari a quattro volte il periodo di clock: quindi con un clock pari a 4MHz ogni istruzione viene eseguita normalmente in 1 µs; le istruzioni di test, quando la condizione risulta vera, e di chiamata necessitano di un tempo doppio (due cicli istruzione).
5.3.2 Scopo e caratteristiche della programmazione basata sull’uso dello
switch magnetico.
Lo scopo di questo tipo di programmazione è pilotare gli stati di power down e
wake up del dispositivo, utilizzando il sensore magnetico precedentemente descritto: per
questo motivo, l’uscita del sensore magnetico viene collegata sul pin GP1, dopo averlo configurato come canale di ingresso digitale. Normalmente, ossia in assenza di campo magnetico, l’uscita del sensore è sul livello basso: quando viene avvicinato un magnete, l’uscita del sensore scatta su un livello alto; il meccanismo di interruzione della porta
GPIO viene attivato proprio dal cambiamento di tensione registrato sul pin GP1 e
risveglia il microcontrollore dallo stato di sleep, che prosegue nell’esecuzione delle istruzioni. Dopo il wake up tramite un primo avvicinamento del magnete, il dispositivo rimane attivo finché, avvicinando la seconda volta il magnete, viene posto nuovamente nello stato di sleep.
Nel diagramma a blocchi riportato in figura 5.30 viene descritto in modo più dettagliato l’algoritmo proposto. Il dispositivo si accende tramite un interruttore che collega la batteria al circuito, quindi vi è la fase di impostazione dei vari registri: vengono settati gli ingressi analogici del convertitore A/D e l’ingresso digitale a cui collegare lo
switch magnetico; il comparatore viene messo nello stato lowest-power; vengono quindi
abilitate le interruzioni da parte della porta GPIO settando gli appositi registri IOC (Interrupt on Change) e INTCON (Interrupt Control Register); a questo punto il microcontrollore va nello stato power-down con l’esecuzione dell’istruzione sleep.
Power-on Impostazione registri SLEEP GP1 Interrupt on change WAKE-UP Conversione A/D e Trasmissione dati RITARDO SOFTWARE DI 50s Test su pin GP1 NO SI NO SI
Si riportano di seguito le linee di codice corrispondenti a questa fase: start
bcf STATUS,RP0
bsf CMCON,0 ;comparatore OFF (lowest power)
bsf CMCON,1
bsf CMCON,2
bsf INTCON,GIE ;abilitazione interruzioni di GPIO
bsf INTCON,GPIE
bsf STATUS,RP0 ;selezione bank1 data memory
bcf TRISIO,5 ;GP5 output
bcf TRISIO,2 ;GP2 output
bsf ANSEL,4 ;Tad = 2usec
bcf ANSEL,2 ;AN2 digital I/O
bcf ANSEL,1 ;AN1 digital I/O
bsf IOC,1 ;abilitazione interruzione su GP1
bcf STATUS,RP0
start1 sleep nop
A questo punto il sistema rimane inattivo finché non rileva una variazione di tensione sul pin GP1; quando avviene il wake-up, viene per prima cosa azzerato il flag di interruzione della porta GPIO e viene effettuata per dieci volte, a distanza di circa 390 ms l’una dall’altra, l’operazione di conversione e trasmissione dei dati rilevati dai sensori; dopo questo primo ciclo di trasmissione, si inserisce un ritardo software di 50 s che
indicato come test su GP1); a livello software si testa il bit corrispondente a GP1: se questo risulta nuovamente pari a 1 si esegue l’istruzione sleep e cessano le operazioni di conversione e trasmissione.
Le linee di codice corrispondenti sono le seguenti:
movlw 0xFF movwf TEMPA movwf TEMPB movwf TEMPC D50s ;ritardo=TEMPC*[3+TEMPB(3+3*TEMPA)]*Tcycle=50sec decfsz TEMPA,1 goto D50s decfsz TEMPB,1 goto D50s decfsz TEMPC,1 goto D50s btfss GPIO,1 goto zerotx
bcf ADCON0,0 ;disattivazione modulo A/D
bcf GPIO,5 ;TX OFF
Per quanto riguarda il funzionamento del trasmettitore e del convertitore, entrambi necessitano l’introduzione di un certo ritardo software per il loro corretto funzionamento: prima di iniziare la trasmissione è necessario attendere 1.5 ms affinché il cristallo si attivi e sia a regime, mentre il convertitore A/D necessita di un tempo di acquisizione pari a 20 µs, ogni volta che viene selezionato un nuovo canale di ingresso analogico, prima di dare inizio alla conversione.
Come si può vedere dagli esempi riportati, i ritardi vengono realizzati con dei cicli annidati, andando a decrementare diversi registri contatore: calcolando il tempo di esecuzione di ogni istruzione, il valore opportuno viene stabilito a seconda del numero di registri che si utilizzano e del valore che viene impostato sul registro che controlla il ciclo più esterno, mentre i registri contatori dei cicli interni vengono impostati con il massimo valore; questo meccanismo si basa sull’osservazione che i registri dei cicli più interni, una volta azzerati, al passo successivo ritornano al valore massimo (00000000→11111111), perciò si esce dalla subroutine di ritardo quando il registro che controlla il ciclo più esterno va a zero; nel caso dell’intervallo di trasmissione pari a 50 s si usano 3 registri ed il ritardo si calcola come Tdelay = TEMPC * [ 3 + TEMPB ( 3 + 3 * TEMPA ) ] * Tcycle = 49.9 s.
5.3.3 Scopo e caratteristiche della programmazione basata sull’uso del comparatore.
Come descritto precedentemente, il comparatore possiede anche una tensione di riferimento interna, impostabile via software; l’algoritmo proposto ha lo scopo di pilotare gli stati di power-down e wake-up, sfruttando le variazioni di pressione rilevate dall’apposito sensore, rispetto ad un valore di soglia che viene impostato come illustrato di seguito. Quando il comparatore cambia il suo stato di uscita a causa di una variazione di pressione, invia una interruzione che attiva il microcontrollore: a questo punto avviene la conversione e la trasmissione dei valori rilevati; quindi il microntrollore rientra nella fase di sleep. Insieme a questo meccanismo, si è scelto anche l’utilizzo del modulo
watchdog, in modo da avere in fase di test un controllo sulle funzionalità del sensore:
come nel primo prototipo, il sistema viene risvegliato ogni 2.3 s e trasmette il valore rilevato dal sensore che pilota il comparatore; in questo modo è possibile verificare se si siano verificati guasti del sistema.
In figura 5.31 si riporta il diagramma a blocchi corrispondente: una volta che il dispositivo è acceso, la pressione rilevata dal sensore viene utilizzata per impostare la tensione di soglia.
La subroutine che compie questa operazione preleva i quattro bit più significativi del valore convertito e li copia nei bit VR3÷VR0 del registro VRCON; poiché è stato scelto il range di tensioni di soglia basso, ipotizzando che in uscita dal sensore di pressione ci sia una tensione inferiore a 1.8 V, la formula con cui calcolare la tensione di soglia impostata diventa: Vdd VR VR CVref range low Vrr )* 24 0 : 3 ( : ) ( 1 − = = ;
Power-on
Impostazione della tensione di soglia e dei registri SLEEP WATCHDOG TIME-OUT WAKE-UP Conversione A/D e
Trasmissione dati con bits inizio trama 000 NO
SI Conversione A/D
e
Trasmissione dati con bits inizio trama 001
Le linee di codice corrispondenti sono le seguenti:
bsf STATUS,RP0 ;selezione bank1
;copia dei 4 bit piu' significativi di DATA_IN in VRCON<3:0> (VRCON<7:0>=<0...0> al POR) btfsc DATA_IN,7 bsf VRCON,3 btfsc DATA_IN,6 bsf VRCON,2 btfsc DATA_IN,5 bsf VRCON,1 btfsc DATA_IN,4 bsf VRCON,0
bsf VRCON,VRR ;CVREF e[0;1.875V]
bsf INTCON,PEIE ;abilitazione interruzioni da periferiche bsf PIE1,CMIE ;abilitazione interruzioni dal comparatore
bcf STATUS,RP0
bcf PIR1,CMIF ;flag di interruzione del comparatore =0 ;configurazione del tipo di funzionamento del comparatore
bcf CMCON,CINV bsf CMCON,CM2 bcf CMCON,CM1 bcf CMCON,CM0 bsf INTCON,GIE start1 SLEEP nop
Vengono anche settati i registri per abilitare il meccanismo di interruzione e il flag corrispondente all’interruzione del comparatore viene posto a zero.
A questo punto il sistema va in sleep e si risveglia o per effetto di una variazione di pressione o per effetto del timer watchdog: in caso di wake up tramite comparatore, il flag corrispondente deve nuovamente essere azzerato via software.
In fase di trasmissione, i segnali trasmessi vengono discriminati in questo modo: se l’interruzione è inviata dal comparatore, i tre bit di inizio trama sono impostati come 000 e i dati vengono inviati per dieci volte a distanza di circa 400 ms; se invece l’interruzione è inviata dal modulo watchdog, i bit di inizio trama sono impostati come 001 e viene trasmesso un unico dato. Per quanto riguarda i vari cicli di ritardo software, vale quanto detto nel paragrafo precedente.
5.3.4 Prove effettuate per testare il codice Assembler
Per testare i programmi assembler sviluppati in ambiente MPLAB® IDE (Integrated
Development Environment Software), si sono seguite due procedure:
• inizialmente è stato effettuato un debug software molto accurato; il programma è stato mandato in esecuzione, istruzione dopo istruzione, tramite il simulatore software, controllando lo stato di ogni registro interessato dall’istruzione eseguita, per verificare che i dati contenuti fossero corretti; questo sistema permette di eliminare la maggior parte di eventuali errori di configurazione dei parametri del microcontrollore;
• in seguito sono state fatte alcune prove in aria per verificare la funzionalità dei moduli watchdog, comparatore e porta GPIO: per questo motivo sono state realizzate alcune versioni di test della programmazione, in cui ogni modulo è stato attivato separatamente dagli altri; per monitorare i dati trasmessi dal modulo, l’uscita del ricevitore è stata collegata alla seriale del PC e contemporaneamente al canale d’ingresso di un oscilloscopio: questo per poter controllare che la temporizzazione dei dati trasmessi fosse corretta; nel caso del comparatore, è stato impostato via software un valore di soglia pari a 1 V, poi si è collegato il canale d’ingresso libero del comparatore a un alimentatore (l’altro ingresso infatti è collegato alla tensione di riferimento impostata, generata internamente al microcontrollore); la tensione applicata dell’alimentatore è stata poi fatta variare: ad ogni attraversamento del valore di soglia, si è controllato che il modulo si attivasse grazie alla interrupt inviata dal comparatore e trasmettesse la corretta trama di dati; nel caso della porta GPIO si è seguita una procedura analoga, sfruttando però direttamente la tensione di uscita del sensore di Hall: tale tensione è stata poi variata semplicemente avvicinando o allontanando dal sensore un piccolo magnete.
5.4 Realizzazione del circuito di acquisizione e trasmissione
5.4.1 Introduzione
Per la realizzazione hardware del circuito di acquisizione e trasmissione, è stato necessario l’uso del software ORCAD per creare i file di funzionamento della fresa presente fra le attrezzature del laboratorio CRIM.
L’insieme di Orcad-Capture e Orcad-Layout costituiscono uno strumento per la gestione del flusso di progetto di una PCB, dallo schematico del circuito al layout vero e proprio.
Il primo passo nella realizzazione di una PCB è la creazione, con Capture, dello schematico del circuito , in cui vengono scelti i componenti ed effettuate le connessioni circuitali (fig.5.32).
Per facilitare questa operazione sono presenti librerie standard in cui ogni componente è schematizzato con tutte le caratteristiche necessarie: molto importante è la fase di assegnamento delle dimensioni reali, che vengono poi riportate sulla PCB.
A questo scopo, vengono utilizzate delle etichette, i footprints, a cui corrisponde il layout del componente: può accadere che un elemento non sia incluso fra i footprints delle librerie disponibili, ma il software offre l’opportunità di creare da zero un componente, a livello di schematico su Orcad-Capture e di layout su Orcad-Layout (fig.5.33).
Quando lo schematico è pronto (estensione .dsn), per importarlo su Orcad-Layout (estensione .max) si utilizza la netlist associata tramite Capture (estensione .mnl) in cui sono memorizzate tutte le informazioni necessarie; a questo punto su Layout vengono impostati tutti i parametri della PCB: si tratta di settare il numero ed il tipo di strati della board su cui si intende lavorare, creare eventuali piani di massa e di alimentazione, stabilire le dimensioni delle piste, delle distanze fra i diversi elementi, delle dimensioni di eventuali fori passanti fra gli strati presenti.
A questo punto segue lo sbroglio delle piste del circuito: vengono cioè tracciate le piste che verranno poi stampate sulla board, rispettando alcune regole di spaziatura e posizionamento.
In figura 5.34 si osserva il layout realizzato con la fresa su board bifaccia, con piste stampate su entrambi i lati: in verde sono contrassegnate le piste sul lato top, in rosso quelle sul lato bottom.
A seconda delle dimensioni del circuito, l’operazione di sbroglio può essere effettuata manualmente, avvalendosi sempre di opzioni che facilitano questa fase, oppure automaticamente. In genere lo sbroglio automatico delle piste è parziale e deve essere completato a mano dal progettista.
Le operazioni possibili con questi software sono veramente molte: ad esempio è anche possibile eseguire delle simulazioni del funzionamento del circuito per un migliore dimensionamento dei parametri che lo caratterizzano; inoltre in caso di modifiche, si può sempre fare riferimento allo schematico di partenza, in quanto il file .max può essere continuamente aggiornato in relazione alle variazioni apportate al design.
5.4.2 Descrizione e dimensioni fisiche dei prototipi progettati
Per una corretta realizzazione della board sono state seguite alcune regole di layout, come riportato nei datasheet dei componenti utilizzati, e si è posta attenzione a scalare al massimo le dimensioni del circuito.
È stata utilizzata una PCB bifaccia dotata di piano di massa: in questo modo i pin VSSRF risultano collegati con tracce cortissime; il potenziale di terra e l’alimentazione del
microcontrollore coincidono con quelli del trasmettitore; per evitare componenti che aumentassero le dimensioni del circuito è stato evitato l’utilizzo di condensatori di
by-pass, senza compromettere il buon funzionamento del prototipo, dato che viene
alimentato con una tensione stabile quale può essere quella di una batteria; i collegamenti di terra sono stati mantenuti il più possibile separati, evitando la condivisione di una stessa pista. I parametri dimensionali sono stati fissati in conseguenza dei limiti tecnologici della fresa utilizzata: ciò significa che appoggiandosi ad una ditta esterna si possono ottenere dimensioni ancora più ridotte.
Per la realizzazione del circuito, è stata stabilita una larghezza minima delle piste pari a 0.3 mm, lo stesso valore anche per la distanza fra i diversi componenti; i fori per i connettori e le vie di passaggio da un lato all’altro sono state realizzate con punte da 0.45 mm.
Con questi parametri si sono ottenuti prototipi di 9 mm di larghezza e 17.8 mm di altezza; lo spessore risulta di circa 5.6 mm; il circuito di amplificazione del sensore è stato montato su una PCB di dimensioni poco inferiori, ed infine i due circuiti accoppiati con gli opportuni collegamenti: in figura 5.35 si può osservare il modulo di trasmissione.
Fig. 5.35 Prototipo del circuito di telemetria realizzato con la fresa.
Sempre nel rispetto di specifiche di ingombro minimo, su questi prototipi si sono evitati i connettori per la realizzazione della programmazione in-circuit.
In fase di test, il prototipo miniaturizzato del modulo di trasmissione non ha funzionato: le clearance stabilite per minimizzare la superficie del circuito sono risultate troppo stringenti per la macchina fresatrice e i collegamenti si sono subito deteriorati. Per questo motivo si è in seguito utilizzato un prototipo realizzato su un solo lato della PCB e con piste di collegamento e clearance maggiori, sul quale è stato inoltre mantenuto il connettore per la programmazione in circuit.
La basetta è stata collegata con le stesse modalità illustrate in precedenza al circuito di amplificazione e con questo modulo è stato poi effettuato il secondo test in vivo.
5.5 Embedding del prototipo per il secondo test in vivo
5.5.1 IntroduzionePer effettuare le prove in vivo è stato studiato un sistema di packaging per preservare l’integrità del circuito dal contatto coi liquidi biologici; inoltre, per non compromettere un eventuale riutilizzo del dispositivo, si è pensato ad una protezione che potesse essere rimossa con facilità, sia per la sostituzione delle batterie, che per eventuali riparazioni; tutto questo con ingombro minimo, per non aumentare eccessivamente le dimensioni del prototipo finale.
Per ottenere un packaging che rispondesse a tali caratteristiche, sono state effettuate diverse prove; come descritto precedentemente, in un primo momento è stato rivestito il modulo con silicone, ottenendo un’ottima impermeabilità ai liquidi biologici anche nei punti esposti (interruttore e sensore): il silicone ha infatti aderito perfettamente alle parti sporgenti; purtroppo, quando successivamente si è cercato di recuperare il modulo, si è constatato che il distacco del materiale dai componenti è molto difficoltoso e distruttivo per i collegamenti del circuito; per tale motivo nel seguito si è preferito evitare il contatto diretto tra circuito e polimero di rivestimento.
È stata cercata quindi una soluzione alternativa: un blocchetto di teflon è stato scavato in modo da poter alloggiare al suo interno il modulo; in questo contenitore sono state praticate due aperture (per l’interruttore e per il sensore), come si può osservare in figura 5.36.
Fig.5.36 Embedding in teflon. Apertura per il sensore Apertura per l’interruttore Viti di chiusura Anelli di aggancio del modulo
Il contenitore è stato chiuso con un coperchio fissato tramite quattro viti e le fessure sigillate con silicone: in questo caso si sono osservate piccole infiltrazioni all’interno del
packaging, in quanto l’aderenza tra teflon e silicone è risultata scarsa, senza garantire la
necessaria tenuta.
Infine si è cercato di combinare le due soluzioni precedenti, optando per un
packaging multistrato: si è pensato di ricoprire il modulo prima con uno strato di
paraffina, quindi di rivestire il tutto con silicone per garantire la biocompatibilità; a tal fine sono stati costruiti due stampi cilindrici in DELRIN (fig.5.37), di diverso diametro, con un tappo rimovibile sul fondo in modo che la capsula finale risultasse facilmente estraibile dallo stampo.
Fig. 5.37 Stampi in DELRIN per embedding multistrato. Cilindro cavo in DELRIN (diametro=23 mm) Cilindro cavo in DELRIN (diametro=19 mm)
La prima colata con la paraffina è stata fatta con lo stampo di diametro inferiore; poi il dispositivo è stato inserito nel cilindro di diametro maggiore, per essere ricoperto con lo strato finale di silicone; si è ottenuto un discreto risultato, in quanto la paraffina è stata rimossa facilmente dai componenti, sciogliendola a contatto con una sorgente calda: comunque la basetta è rimasta ricoperta da alcuni residui.
5.5.2 Descrizione del sistema di embedding
Dopo questa serie di prove, si è pensato di avvolgere il modulo con un film di poliuretano
MP 1820 Nat (125 µ di spessore) di JPS Elastomerics; il sensore di pressione è stato fatto
sporgere da questo primo incapsulamento; quindi il modulo è stato posizionato nello stampo in Delrin di diametro minore ed è stato colato all’interno dello stampo una quantità pari a circa 19 g di silicone Sylgard 170; il silicone utilizzato è una miscela in parti uguali di due sostanze: la fase di miscelazione è causa della formazione di bolle d’aria all’interno del materiale polimerizzato e questo lo rende un materiale soggetto a cricche meccaniche, quindi facilmente sfaldabile; perciò, prima della polimerizzazione, la miscela è stata posta sottovuoto per una decina di minuti per eliminare le eventuali bolle d’aria presenti all’interno.
Normalmente tale silicone polimerizza in 24 h, però si ottiene lo stesso risultato ponendo lo stampo in forno a 70°C per circa 30 min, finché il polimero non risulta solidificato. Il risultato di tale embedding è mostrato in figura 5.38 , con accanto lo stampo utilizzato.
Fig. 5.38 Embedding in poliuretano e silicone.
Coperchio rimovibile Stampo in
Delrin
Packaging finale del
modulo
Punta del sensore di pressione
È possibile distinguere la punta del sensore che sporge dal resto della capsula di silicone; a questo punto è stato verificato lo stato del modulo in seguito a tale procedura di
embedding: lo strato di silicone è stato rimosso (fig.5.39, in cui è visibile il modulo di
condizionamento del segnale) ed è stato constatato che il modulo è rimasto protetto dalla pellicola di poliuretano, senza che il silicone sia filtrato all’interno.
Fig. 5.39 Modulo estratto dall’embedding di silicone.
Modulo per il
condizionamento del segnale in uscita dal sensore
Pellicola protettiva di poliuterano
Sensore di pressione
Alla fine quindi il modulo è risultato perfettamente integro, mentre il film esterno di silicone garantisce sia impermeabilità ai liquidi che le caratteristiche di biocompatibilità necessarie.
5.6 Interfaccia utente
5.6.1 Introduzione
Per la fase di realizzazione dell’interfaccia utente è stato utilizzato il software
Labview di Texas Instruments. Si tratta di un ambiente di sviluppo grafico che permette
di acquisire, analizzare, gestire dati, tramite la creazione di una interfaccia utente per il controllo interattivo del sistema in analisi.
Tramite Labview si costruisce un programma grafico detto virtual instruments (VI), piuttosto che scrivere un programma text-based: in questo modo si crea velocemente il
front-panel dell’interfaccia utente; per aggiungere le funzionalità necessarie si
assemblano i diagrammi a blocchi disponibili con dei fili che simulano il trasferimento dei dati attraverso i nodi dei collegamenti; questi diagrammi sono oggetti in grado di eseguire semplici funzioni aritmetiche, acquisizioni avanzate, routine di analisi, operazioni di I/O di files ed altro ancora. In questo modo il flusso di programmazione risulta molto intuitivo: viene abbandonata l’architettura lineare dei linguaggi di programmazione text-based a favore di un ordine di esecuzione delle istruzioni stabilito dal flusso dei dati attraverso i nodi; inoltre si possono creare diagrammi a blocchi che eseguono più istruzioni in parallelo, creando un sistema multi-tasking; poiché in molte applicazioni la velocità di esecuzione risulta un parametro critico, il compilatore Labview genera un codice ottimizzato con velocità di esecuzione comparabili a quelle dei programmi "C" compilati.
Sul front-panel del VI creato si posizionano i comandi e i displays per la visualizzazione dei dati selezionando fra diversi oggetti, fra cui displays numerici, LEDs e grafici. Quando il VI viene mandato in esecuzione, il front-panel controlla il sistema in analisi.
5.6.2 Descrizione delle caratteristiche dell’interfaccia utente proposta
In figura 5.40 viene riportata l’interfaccia utente utilizzata:
Fig.5.40 Interfaccia utente realizzata con Labview.
Tramite i comandi posti sul pannello di comando, l’utente può selezionare la porta seriale a cui il ricevitore è collegato, la velocità di trasmissione della seriale, il numero di byte da leggere ed il file in cui memorizzarli per eventuali elaborazioni successive; i due bottoni di avvio e stop danno inizio e terminano l’acquisizione dei campioni; inoltre viene rilevato l’istante di ricezione di ogni campione; i campioni elaborati vengono anche graficati in funzione dell’istante di acquisizione.