Capitolo 2
Architettura del sistema di attuazione
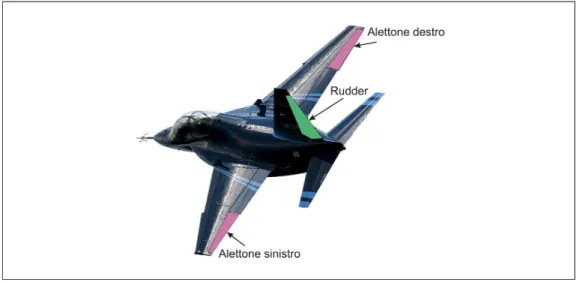
Il modello sviluppato nel presente lavoro ha lo scopo di descrivere la dinamica degli attuatori che governano le superfici di comando di alettone e rudder del velivolo M346 (Figura 2.1) nella condizione “normal operation”, ovvero in assenza di avarie.
Figura 2.1 Superfici di controllo oggetto di studio.
Si ritiene, tuttavia, opportuno sottolineare che la configurazione del sistema di attuazione oggetto di studio è rappresentativa dei sistemi di attuazione dei comandi primari di volo di gran parte dei moderni velivoli fly-by-wire ad alte prestazioni, pertanto la seguente trattazione può essere sostanzialmente ritenuta di validità generale.
2.1 Sistema di attuazione dell’M346
Come precedentemente accennato, la movimentazione delle superfici di controllo primarie del velivolo M346 è ottenuta mediante attuatori lineari tandem, ovvero a doppia unità idraulica.
Le due unità idrauliche dell’attuatore sono alimentate da due impianti idraulici indipendenti, garantendo così una duplice ridondanza idraulica. Una delle unità, inoltre, è caratterizzata dalla non simmetria delle aree prementi del pistone, a causa della presenza del trasduttore di posizione ad induzione LVDT (Linear Variable
Differential Transformer), usato per il controllo in ciclo chiuso sulla posizione del pistone.
La portata nelle camere dell’attuatore è regolata da una servovalvola proporzionale DDV (Direct-Drive Valve) strutturalmente separata dal corpo di attuazione, ad esso collegata mediante tubazioni rigide.
Figura 2.2 Struttura interna del LFM [7].
La DDV è essenzialmente costituita da un motore elettrico lineare LFM (Linear
Force Motor) a quadruplice ridondanza elettrica (con quattro bobine coassiali), dal cassetto di distribuzione (spool) e da trasduttori di posizione ad induzione LVDT (anch’essi presenti in quadruplice ridondanza), necessari per il controllo in ciclo chiuso sulla posizione dello spool e per il monitoraggio di sistema.
Intentionally Left Blank
Lo spostamento del cassetto di distribuzione avviene sotto l’azione di forze magnetiche opportunamente indotte dalle bobine di eccitazione del LFM (Figura 2.2). Quando esse non sono attraversate da corrente, la posizione di equilibrio dello spool corrisponde alla posizione centrata rispetto alle battute metalliche in quanto la molla di centraggio risulta scarica e le forze magnetiche esercitate dai magneti permanenti sull’armatura sono in equilibrio.
L’armatura è rigidamente collegata allo stelo dello spool, pertanto, per comandare uno spostamento, è sufficiente far circolare corrente nelle bobine di eccitazione, in modo da indurre un flusso magnetico aggiuntivo che favorisce la polarizzazione dell’armatura da un lato o dall’altro a seconda del verso della corrente.
In corrispondenza di una corrente non nulla, la condizione di equilibrio dello spool è definita dal bilancio fra la forza magnetica applicata e l’azione della molla di centraggio. SOV 2 M2 M1 S2 S1 Motore elettrico Stadio 2 BPV 2 Pistone di pilotaggio Battuta Stadio 1 LVDT Pistone LVDT DDV SOV 1 BPV 1 DDV
Figura 2.3 Schema del sistema di gestione delle modalità operative.
Le ridondanze idrauliche ed elettriche hanno lo scopo di garantire che il sistema, in
Intentionally Left Blank
alle proprie funzioni, senza compromettere l’operatività del Flight Control System
Fly-By-Wire (FCS-FBW).
Il passaggio dalla modalità “normal operation” (entrambi gli impianti idraulici funzionanti), alle modalità operative in presenza di avarie, è gestito da due valvole di by-pass (BPV, By-pass Valve) azionate dalla presenza o meno di pressione nei rispettivi impianti di alimentazione idraulica.
Le BPV (Figura 2.3) hanno lo scopo di mettere in comunicazione le camere bilanciate del martinetto al fine di evitarne il blocco in caso di avaria del corrispondente impianto. Allo stesso scopo, a causa della asimmetria delle superfici prementi, in caso di avaria dell’impianto 2, oltre ad essere cortocircuitate, le camere vengono anche collegate allo scarico.
Quando si verifica il jamming (blocco) dello spool di valvola, i FCCs disattivano le SOV, così che l’attuatore passi in modalità fail-safe.
Analogamente, qualora si verificasse una caduta di pressione in entrambi gli impianti, il sistema si porterebbe in modalità “fail safe”, nel caso di aileron/rudder, isolando la servovalvola e cortocircuitando entrambe le camere bilanciate dell’attuatore. Una strozzatura ha la funzione di smorzare il movimento per effetto delle forze aerodinamiche che agiscono sulle superfici di controllo, ed evitando problemi di flutter.
Intentionally Left Blank
2.2 Cinematica del sistema di attuazione dell’M346
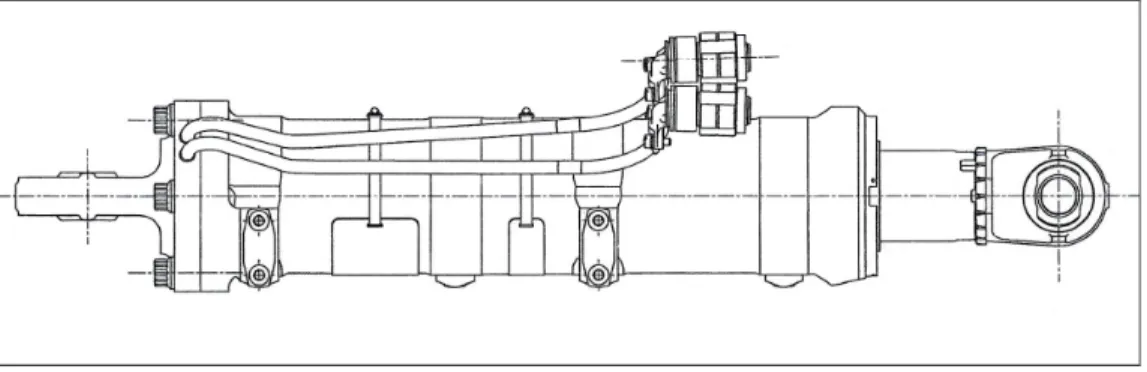
L’istallazione sul velivolo degli attuatori impegnati nella movimentazione del rudder e degli alettoni dell’M346, prevede che essi siano vincolati alla struttura mediante una cerniera solidale alla cassa, ed al cinematismo di movimentazione della superficie mobile mediante una cerniera solidale al pistone (Figura 2.4).
Figura 2.4 Vista laterale dell'attuatore per la movimentazione di alettone e/o rudder.
Gli attuatori sono posizionati in maniera tale che, quando la superficie è a 0° (deflessione nulla), il pistone si trovi in posizione ortogonale alla leva di movimentazione della superficie mobile e centrata rispetto alla corsa disponibile [5].
In Figura 2.5 si riporta una rappresentazione schematica, rappresentativa del reale cinematismo di movimentazione delle sopra citate superfici di controllo.
Per rappresentare schematicamente la cinematica degli attuatori, è utile definire un sistema di riferimento locale destrorso (xc, yc ,zc) di origine H, in cui l’asse yc
(uscente dal foglio) rappresenta l’asse di cerniera della superficie mobile (Figura 2.6).
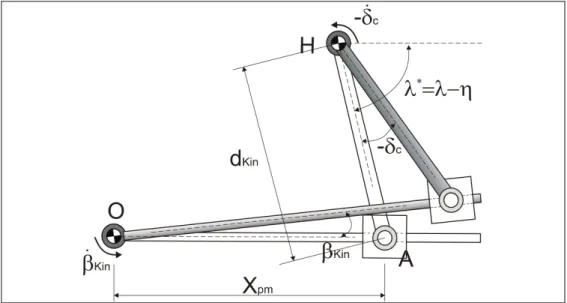
Figura 2.6 Angoli caratteristici del cinematismo a braccio oscillante.
Definito η l’angolo compreso fra il braccio OA e l’asse xc al montaggio, e λ
l’angolo compreso fra il braccio HA e l’asse xc al montaggio, il cinematismo
riportato fa corrispondere allo scorrimento del corsoio A, un moto rotatorio del braccio HA, ed un moto rotatorio alternato del braccio oscillante OA.
Per semplicità di trattazione e senza perdere di generalità, si consideri l’intero cinematismo ruotato in senso antiorario dell’angolo η (Figura 2.7).
Assunta come condizione di riferimento quella iniziale (deflessione nulla), si ha che la posizione dei tre punti di cerniera H, A e O nel sistema di riferimento velivolo assi-corpo è univocamente determinata dalle tre coordinate del punto H e dalle grandezze dkin (distanza fra i punti di cerniera H ed A), xPm (distanza fra i punti di
cerniera O ed A al montaggio), η, λ.
Le quantità βkin , δc, x (spostamento del pistone del martinetto, non rappresentato in
figura) sono fra loro legate mediante le seguenti relazioni [6]:
(
) (
)
( )
(
)
(
)
(
)
(
)
( )
− + = − + + − = + * * * * cos cos cos sin sin sin λ δ λ β δ λ λ β kin c kin Pm kin Pm c kin kin kin Pm d d x x x d d x x (2.1)dalle quali si possono ricavare i legami βkin(δc) e xp(δc) e, in modo inverso, βkin(x) e
δc(x).
Il legame fra lo spostamento del pistone del martinetto rispetto alla cassa e la deflessione della superficie di controllo può essere scritto nel seguente modo:
( )
( )
( )
( )
x x x H x H x x c r r c δ δ =− ⇒ =− (2.2)dove Hr
( )
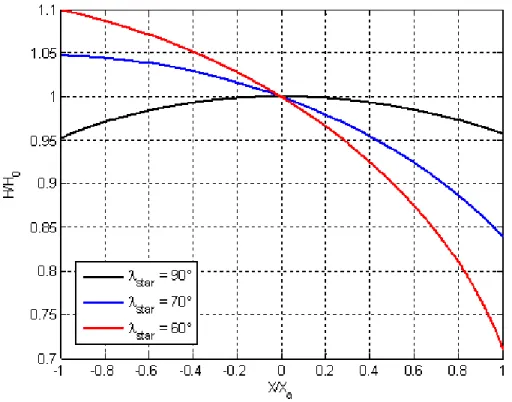
x , definito positivo, rappresenta il braccio di leva (horn radius) del cinematismo corrispondente ad uno spostamento x del pistone.Come evidente dalla Figura 2.8, il braccio di leva varia lungo la corsa descritta dal pistone, e tale variazione dipende dal valore di λ*.
Figura 2.8 Variazione del braccio di leva in funzione della corsa del pistone, al variare di λ*.
Si osservi, tuttavia, come al crescere dell’angolo λ*
, la variazione di Hr lungo la
corsa diventi sempre meno rilevante.
Nel caso particolare del cinematismo di attuazione di aileron/rudder del velivolo M346, *= 90°
λ e la variazione massima di Hr(X) è inferiore al 5% del suo valore
calcolato nella condizione di pistone centrato Hr(Xa/2). Conseguentemente è
![Figura 2.2 Struttura interna del LFM [7].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7326028.90209/2.918.190.778.154.1088/figura-struttura-interna-lfm.webp)