2.5 Attuatori
Tattili
Gli attuatori tattili possono dividersi in due categorie [18]:
• shape displays: che tentano di replicare una forma tramite un certo numero di contattori addensati in un’area posta sotto le dita e che si sollevano ortogonalmente alla pelle del polpastrello, cercando di realizzare una sagoma approssimata dell’oggetto da replicare
• vibrotactile stimulators: basati su vibrazioni distribuite, pensati per sfruttare la persistenza della sensazione. Vibrando a frequenze intorno ai 250Hz, tali attuatori formano immagini tattili associate piuttosto alla lunghezza d’onda della vibrazione che all’ampiezza del movimento (perché eccitano sensori profondi, come i corpuscoli di Pacini, poco sensibili alla deformazione), e che danno principalmente la sensazione della rugosità della superficie.
Gli attuatori tattili esistenti sono in massima parte riconducibili alla definizione di display data, e mantenendo quell’analogia, sono in grado di fornire, più che un’immagine tattile, grazie al tempo necessario ai recettori cutanei per distinguere un nuovo stimolo, dei veri e propri film tattili, con stimoli rapidamente susseguentisi nel tempo a formare una sensazione dinamica.
La risoluzione di questi dispositivi è dell’ordine del millimetro, cioè tale è la distanza fra un contattore e l’altro, e sono capaci di generare vibrazioni in un range di frequenze che va dai pochi Hertz al kHz [20].
In questa breve rassegna vediamo quelli rappresentativi delle categorie sopramenzionate e tali da soddisfare almeno in parte i requisiti prestazionali, di compattezza, “indossabilità” e integrabilità in un sistema VR che sono stati posti come obbiettivi di questo lavoro.
2.5.1
Il display tattile di Hayward
Di semplicissima costruzione, il display tattile di Hayward [17], consiste in una serie di “aculei” inerti, collegati opportunamente ad un sostrato attivo di piloncini piezoelettrici i quali, estendendosi o contraendosi provocano la rotazione dell’elemento di connessione, causando, con ciò, lo spostamento macroscopico dell’estremità dell’aculeo in contatto con la pelle che pertanto ne risulta deformata. Il risultato di tale deformazione è un segnale tattile rilevabile dall’utente.
Applicando una tensione di ±200V agli elettrodi posti alla base degli elementi piezoelettrici tagliati in strisce di 0.25 mm di spessore si ottiene una deformazione lineare di 5µm.
La geometria dell’attuatore è tale da amplificare, lì dov’è il contatto con la pelle, gli spostamenti esigui di cui sono capaci le colonnine di PZT. Sopra lo strato attivo di pzt, collegati da una membrana sono posti i veri contattori, organizzati in una struttura detta “corona”.
Il materiale metallico dei contattori è collegato un circuito elettrico che collega a terra gli attuatori assicurando la protezione elettrica dell’utente.
Meccanicamente gli attuatori sono collegati alla piastra del pc che ospita l’elettronica di comando e che funge pure da telaio per l’attuatore.
La geometria mostrata si riferisce ad un display lineare, organizzando questi elementi lineari in una griglia bidimensionale si può servire un’intera area con una risoluzione lineare elevata (1 sito attivo/1mm) e difficilmente avvicinabile con altri sistemi analoghi grazie alla semplicità di costruzione ed attuazione dell’elemento del display.
Tale operazione non è immediata: per stimolare un’area di pelle sono necessari 4 attuatori lineari che deformino una sezione quadrilatera come in figura ottenendosi una deformazione areolare in corrispondenza di ciascuna deformazione lineare. Ciò è dipendente dalla lunghezza del singolo attuatore lineare, del quale la corona amplifica1 le deformazioni di 10 volte.
Di contro, il display tattile di Hayward paga la sua semplicità con un forte sviluppo nel senso dello spessore ciò ne fa un dispositivo non facilmente indossabile né utilizzabile come componente di un sistema di manipolazione virtuale.
In figura sono mostrati i prototipi del display a 64 attuatori, 112 contattori e 36 vani (gap) che corrispondono alle aree di pelle attuate.
2.5.2
Un display ad ultrasuoni
Masaya Takasaki dell’università di Tokio [40] ha tentato la via di un display tattile capace di rendere la rugosità di una superficie utilizzando onde meccaniche ad alta frequenza (dell’ordine di qualche MHz) propagantisi su una superficie (Surface Acoustic Waves).
Tale realizzazione, ancorché molto specializzata nella prestazione e pertanto poco versatile, è di semplice costruzione e istallazione.
Su un sostrato piezoelettrico è disposto un IDT (InterDigital Transducer: un conduttore il cui nome si deve alla disposizione dei due poli che ricorda le dita intrecciate a cerniera) che, percorso da corrente, produce nel piezoelettrico deformazioni superficiali periodiche che danno luogo ad onde meccaniche propagantisi sulla superficie [39] e rilevate dall’utente come forze tangenziali.
Le caratteristiche della vibrazione che si può in questo modo indurre nel materiale dipendono dalla geometria del IDT. In ogni caso si tratta di onde la cui ampiezza si riduce esponenzialmente con la profondità (onde di Rayleigh2) e che si dipartono ortogonalmente alle “dita” in entrambi i semipiani da esse definiti. Per evitare riflessioni dell’onda al bordo della superficie, con conseguenti rischi d’interferenza, sono stati posti degli smorzatori al bordo della superficie vibrante.
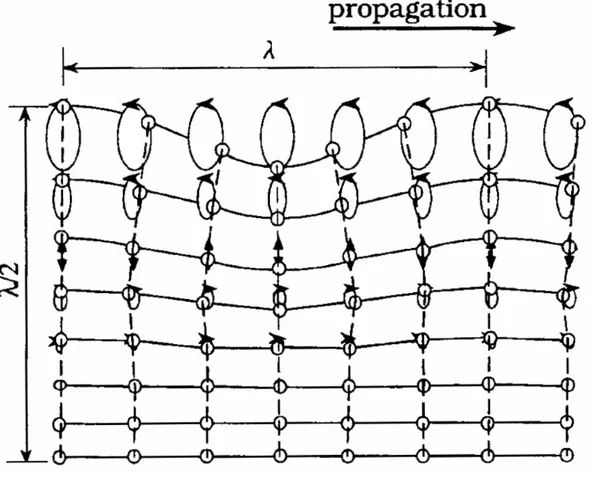
Figure 1: Onde di Rayleigh
2 ponendo in vibrazione una barra metallica è si generano onde che si propagano. Tali onde
possono essere classificate come:
• Onde di Rayleigh: l’ampiezza riscontrabile in superficie si riduce esponenzialmente con la profondità
• Onde flessionali: la barra si deforma ondeggiando come una sinusoide In entrambi i casi, i punti sulla superficie si muovono descrivendo traiettorie ellittiche su un piano normale alla superficie e contenente l’onda e non semplici traslazioni lineari.
John William Strutt Lord Rayleigh (1492-1919), discepolo ingrato a Stokes che lo incoraggiò a non intraprendere la carriera scientifica, identificò questa tipologia di onde nello studio dei terremoti descrivendola, con la sua teoria delle onde, nel 1879 nei Proceedings of the London
Mathematical Society.
Il SAW display con tali vibrazioni dovrebbe fornire all’utente la sensazione di rugosità della superficie eccitando i recettori profondi della pelle ma, mentre i corpuscoli del Pacini sono sensibili a frequenze inferiori ai 250-300 Hz, le vibrazioni prodotte dagli IDT raggiungono frequenze dell’ordine del MHz.
Il dispositivo, per riprodurre le vibrazioni che la pelle del dito che scorre sul display interpreta per valutare la rugosità della superficie stessa, dovrebbe perciò vibrare a frequenze molto minori della sua frequenza operativa di 9.6MHz; se una persona venisse direttamente in contatto con una superficie vibrante a così alta frequenza non avvertirebbe nessuno stimolo. Il problema è stato risolto inserendo uno strato di sferette d’acciaio del diametro medio di 800µm fra la superficie vibrante e quella d’interfaccia e ricoprendo quest’ultima con un film di latex che costituisce anche la superficie (anallergica e di facile manutenzione) di contatto con l’utente.
La frequenza operativa del display è legata alla geometria del IDT ed è quindi determinata. Essa viene variata modulando la corrente applicata.
Il display SAW funziona sia in modalità attiva che passiva: l’utente, cioè, può muovere il dito sul display, esplorando la superficie, o tenerlo fermo.
Il display sembra però fornire stimoli tattili molto deboli, non chiaramente percepibili.
Per incrementare la prestazione lo strato di sfere metalliche è stato sostituito con un tastatore di materiale siliconico con numerosi rilievi.
2.5.3
Attuatori a fluidi elettroreologici
Usati nelle interfacce aptiche3 che riproducono la cedevolezza dell’oggetto da manipolare, hanno visto una qualche analoga applicazione tattile in ditali attuati che potessero conferire all’utente l’impressione di toccare una superficie più o meno cedevole.
Tali dispositivi consistono di un ditale con un’intercapedine nella quale è posto un fluido elettroreologico, la cui viscosità può esser variata applicando un campo elettrico.
3 MEMICA (MEchanical MIrroring using Controlled stiffness and Actuators) è un progetto del
JPL per il controllo elettronico in retroazione dello smorzamento e delle forze di contatto fra un attuatore robotico e l’operatore umano. Concepito per essere un sistema applicabile a vari tipi d’interfaccia, ha avuto applicazioni anche in un guanto che riproduce all’operatore la cedevolezza di un oggetto virtuale o telepresente grazie a pistoni dissipativi il cui scorrimento è controllato con il variare della viscosità di un fluido elettroreologico.
Variando la viscosità si ha un’illusoria variazione di densità del materiale che in verità semplicemente si organizza diversamente, orientando le particelle sensibili al campo (precedentemente disperse nel liquido matrice) in modo ordinato, col risultato di “congelare” il liquido e conseguentemente facendo sentire all’utente il contatto con una superficie più o meno rigida [44].
Sebbene le intercapedini possano essere suddivise in cuscinetti più piccoli, in modo da realizzare distribuzioni variabili di cedevolezza sulla zona di pelle servita dall’attuatore, la risoluzione rimane bassa e inoltre con questa soluzione non è possibile deformare la cute.
Non a caso questi dispositivi hanno trovato applicazione in sistemi master-slave di manipolazione dove è importante creare un feedback che impedisca all’utente di comandare troppa forza sul manipolatore col rischio di danneggiare l’oggetto manipolato [49].