Capitolo 5
Modellazione ibrida FEM : Helical 3D
5.1
Introduzione
L’utilizzo di software avanzati, che si basano su metodologie FEM, ha permesso l’analisi dell’ingranamento tenendo conto di fenomeni e di dettagli che rendono la progettazione più efficiente e intuitiva grazie ad una simulazione realistica dell’ingranamento delle ruote. A tale proposito Helical 3D [24] è uno dei più recenti, completi ed avanzati codici di calcolo per la modellazione e la verifica degli ingranaggi.
Il programma Helical 3D è in grado di eseguire un’analisi tridimensionale sia statica che dinamica del contatto sotto carico, caratterizzata dalla compresenza di un modello FEM e di una collezione di metodi specifici per il problema del contatto .
L’utilizzo di una combinazione di metodi FEM e di metodi analitici, permette di sfruttare i vantaggi di entrambi gli approcci.
Il metodo FEM permette il calcolo del comportamento globale dell’ingranaggio, garantendo soddisfacenti risultati a sufficiente distanza dalla zona di contatto, mentre i metodi analitici risolvono problematiche di precisione, di stabilità numerica e di tempi di calcolo.
5.2
Generalità del codice Helical 3D
Il programma consente l’introduzione della geometria del dente tramite parametri macrogeometrici, quali il modulo della dentatura, correzione. ect, ed in una certa misura anche la geometria del corpo ruota.
Inoltre possono essere introdotti anche parametri microgeometrici, come in particolare:
la bombatura del fianco del dente;
la modifica di profilo del dente (in particolare smussatura di testa micrometrica).
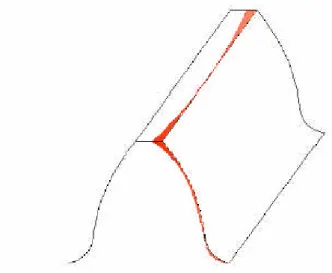
La bombatura, figura 5.1, consiste in una asportazione del materiale che varia lungo il fianco del dente, serve in generale per prevenire effetti come il disallineamento delle ruote.
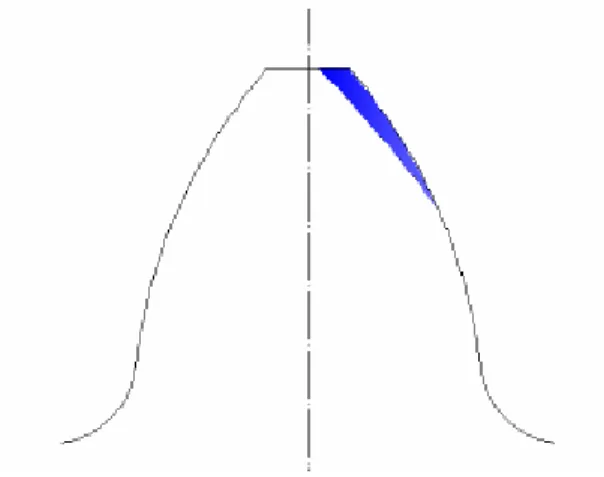
La modifica del profilo del dente, figura 5.2, consiste in una asportazione del materiale rispetto all’evolvente lungo il profilo del dente, e serve per prevenire effetti quali il contatto di testa.
Tale effetto può avvenire all’inizio e/o alla fine dell’ingranamento, a causa del fatto che il dente, a causa delle deformazioni elastiche, si trova spostato rispetto alla posizione teorica in cui si ha ingranamento corretto.
Figura 5.2- Modifica di profilo del dente ( spoglia)
Anche ammettendo di non utilizzare queste modifiche microgeometriche, l’analisi con software avanzati permette comunque un’analisi più approfondita dell’ ingranamento rispetto alle metodologie usate con le normative.
Per ciò che riguarda gli alberi, la cuscinetteria ed i suoi supporti, si può tenerne conto o mediante la modellazione completa oppure inserendo in un’opportuna matrice di rigidezza i valori delle rispettive cedevolezze.
Una volta definita la geometria della dentatura si provvede all’inserimento dei dati per l’intera trasmissione, in altre parole il valore di coppia, il numero di giri, possibili disallineamenti ed eventuali difetti di montaggio, cedevolezze dei cuscinetti ed il valore del coefficiente d’attrito delle superfici a contatto.
5.3
Modellazione delle ruote campione
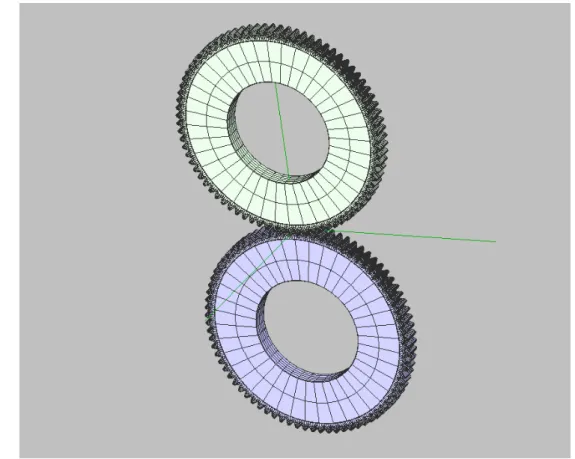
Nel caso specifico, sono state modellate entrambe le ruote campione, figura5.3, secondo i disegni costruttivi disponibili e le caratteristiche geometriche riportate in AppendiceA.
Figura 5.3- Modellazione delle ruote campione
Il modello delle ruote è agli elementi finiti; in particolare viene modellata in maniera diversa la dentatura rispetto al corpo ruota o RIM.
Questo significa che hanno mesh strutturate in modo diverso come si può notare in figura 5.4.
Figura 5.4- Differenza tra la mesh del RIM e della ruota
Questa strategia è stata usata per fare in modo che la mesh del RIM, dove sono presenti minori gradienti di tensione, sia meno fitta in modo da ottimizzare il modello e rendere la simulazione più veloce.
Inoltre il codice prevede la possibilità di scegliere tra tre diversi tipi di mesh: una detta
“Medium”, che è la più grossolana, ma al tempo stesso la più veloce per ciò che riguarda i
tempi di calcolo; una altra detta “Fine Root” la quale consente di ottenere un ulteriore infittimento della mesh.
Infine l’ultima disponibile è la “Finest” che è la mesh più fine, ma anche la più gravosa dal punto di vista dei tempi di calcolo. Nello studio degli ingranaggi campione sono state usate le mesh di tipo “Medium “ e “Fine Root” ( figura 5.5).
(a) (b) Figura 5.5- Forma della mesh:(a) Fineroot, (b) Medium
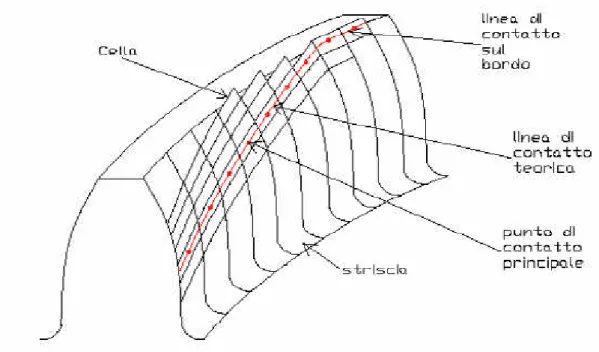
Per poter analizzare la pressione di contatto utilizzando Helical 3D, è necessario definire una griglia nella zona da esaminare; tale griglia permette di discrettizzare la distribuzione del carico nelle singole celle; a questo proposito si procede con la divisione della larghezza di fascia in strisce di uguale larghezza . Sulla mezzeria di ogni singola striscia, viene individuato il punto di contatto primario,
ottenuto mediante stima della minima distanza dalla superficie opposta; il luogo dei punti di contatto primario sarà la linea di contatto teorica.
Una volta controllata la distanza tra i punti di contatto primario dei due fianchi a contatto, se essa risulta maggiore della tolleranza di separazione, si provvede ad eliminare la striscia di appartenenza; su quelle strisce rimanenti si costruiscono le celle .
Il numero delle celle, fornisce la risoluzione della griglia di contatto, figura 5.6, ed è quindi di fondamentale importanza nella determinazione della pressione.
Figura 5.6 – Griglia di contatto
Nella modellazione sono state assunte valide una serie di ipotesi semplificative; innanzitutto non sono stati presi in considerazione possibili errori di disallineamento, né errori di montaggio, né deformazioni iniziali degli ingranaggi.. Le simulazioni effettuate non prevedono la presenza d’attrito nel contatto tra i denti, ed inoltre è stata condotta un’analisi statica, (Kv=1).
Infine è stata trascurata la presenza di cuscinetti di supporto e degli alberi porta ruota e di conseguenza la loro cedevolezza.
A livello geometrico, è stata modellata la bombatura e la spoglia del profilo, mentre non sono stati introdotti possibili errori di divisione tra i denti.
5.4
Risultati
Nella modellazione degli ingranaggi sono riprodotte differenti condizioni di funzionamento, in particolare, come coppie torcenti applicate alla ruota motrice, vengono presi i valori di 200, 300, 400 e 500 Nm, e si assume che tali coppie siano trasmesse in modo uniforme su tutto il corpo ruota ( figura 5.7 ).
I valori di coppia, alle quali verranno testati gli ingranaggi campione, al banco prova presso il CRTM, sono invece di 400 e 500 Nm.
Immettendo nel codice i valori delle coppie, si ottengono i grafici dell’andamento della pressione di contatto lungo l’arco di ingranamento mostrati in figura 5.8.
Andamento della pressione di contatto [ MPa ]
Bomb 20 micron 0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 2100 2200 2300 2400 2500 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 [M P a ] 200 Nm bomb 20 300 Nm bomb 20 400 Nm bomb 20 500 Nm bomb 20 Arco di ingranamento
Figura 5.8 - Andamento della pressione di contatto
Dove i valori massimi delle pressioni di contatto per ogni coppia applicata sono:
MAX
P 2132 MPa per la coppia di 500 Nm
MAX
P 2011 MPa per la coppia di 400 Nm
MAX
P 1876 MPa per la coppia di 300 Nm
MAX
Nella figura 5.9 è riportato invece l’andamento della pressione di contatto lungo la larghezza di fascia e quello della massima tensione principale per un istante di ingranamento, nel caso che il valore della coppia applicata sia di 500 Nm, che è la condizione di carico più gravosa.
Figura 5.9 - Andamento della pressione di contatto lungo la larghezza di fascia e
visualizzazione della massima tensione principale per un istante di ingranamento
Nel grafico, si rilevano due picchi pronunciati del valore della pressione, dovuti in realtà alla presenza della spoglia del profilo (figura 5.10).
Un risultato di questo tipo non poteva essere osservato con un codice tipo AGMA o ISO, ma solo appunto da un programma con analisi FEM che analizzasse il problema riferendosi alla geometria reale del dente.
Le cause che possano giustificare un tale comportamento della pressione di contatto nello studio di un dente con profilo spogliato, sono probabilmente le seguenti:
presenza di uno spigolo in corrispondenza del roll angle di inizio spoglia, dovuto al cambio di curvatura della superficie del fianco;
contatto tra due superfici a diversa curvatura, proprio a causa della spoglia di modifica.
In realtà, potrebbero intervenire contemporaneamente entrambe le cause, ma mentre per la prima, si può supporre che l’effetto si possa estinguere dopo un breve periodo di rodaggio iniziale della ruota, dati l’alta velocità e l’elevato valore di coppia applicato, che porterebbe a smussare lo spigolo, per quanto riguarda la seconda, il problema è ben più complesso. Infatti, significherebbe che questo innalzamento della pressione di contatto, non sarebbe transitorio ma persistente lungo tutto l’arco di tempo di una prova.
Studio di sensibilità
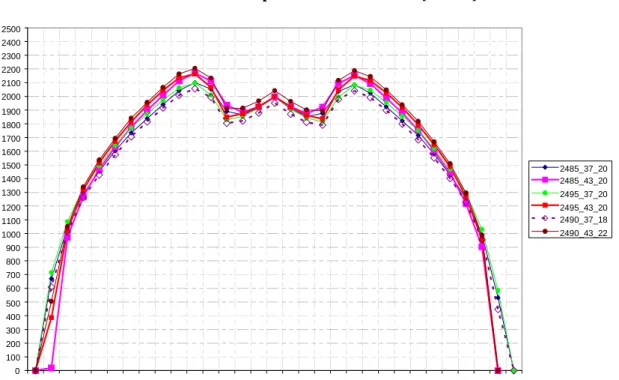
Dai dati forniti da AVIO relativi alla geometria dei test articles riportati Appendice A , sono stati ricavati i grafici di figura 5.11 che mostrano l’effetto delle tolleranze di lavorazione della microgeometria (bombatura e spoglia del profilo) delle ruote sulla pressione di contatto.
In particolare, per effettuare questo studio di sensibilità, per la coppia torcente si è preso il valore di 500 Nm, mentre i parametri microgeometrici sono stati fatti variare in tal modo:
o bombatura : 18 ÷ 22 µm;
o spoglia del profilo : 37 ÷ 43 µm .
Andamento della pressione di contatto [ MPa ]
0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 2100 2200 2300 2400 2500 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 2485_37_20 2485_43_20 2495_37_20 2495_43_20 2490_37_18 2490_43_22 Arco di ingranamento
Relativamente alla pressione massima di contatto, si può notare che ci si può attendere una variazione rispetto al valore medio (relativo alla geometria nominale) di +73 ,-76 [MPa]. Si è inoltre effettuato uno studio di sensibilità riguardo al tipo di mesh utilizzata nel codice. Nella figura 5.12, che si riferisce ad un valore di coppia di 500 Nm, si può notare che, usando una mesh di tipo medium oppure fineroot, citate nei paragrafi precedenti, non ci sono variazioni rilevanti nell’andamento della pressione di contatto.
Andamento della pressione di contatto [MPa]
0 500 1000 1500 2000 2500 3000 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 medium.tpl fineroot.tpl Arco di ingranamento
Figura 5.12 –Andamento della pressione di contatto mesh medium e fineroot
Per concludere, con l’uso del codice Helical 3D sono stati ottenuti risultati ben diversi da quelli determinati con i codici o modelli del capitolo 4. In particolare, oltre al diverso andamento della pressione di contatto, giustificato dalla migliore simulazione della geometria della dentatura, si ottengono valori di tale pressione molto più alti. Questo si manifesta proprio in corrispondenza dei picchi di pressione di cui si parlava prima, causati dalla presenza della spoglia del profilo. Quindi in base ai valori riscontrati, notevolmente maggiori della tensione di contatto ammissibile, a cui si fa riferimento sempre nel capitolo 4, si può dire che si possono manifestare fenomeni di pitting molto prima rispetto a quanto previsto con le normative.