Capitolo 3
METODI DI RICOSTRUZIONE
3.1 Ricostruzione delle immagini
Abbiamo visto nei capitoli precedenti che una bobina phased-array è costituita da più unità. Ciascuna unità riceve indipendentemente il segnale dai segmenti del campione di loro pertinenza, esaminato con un ritardo temporale prestabilito. Ad ogni bobina è associata una catena di ricezione costituita da un preamplificatore e da un sistema di conversione A/D. Ciascuna bobina che compone l’array, quindi, genera un’immagine relativa alla zona del campione in esame. Nella Fig. 3.1 sono mostrate due immagini anatomiche dello stesso organo ottenute con due bobine separate.
Fig. 3.1 Immagini di fantoccio ottenute con due bobine separate (bobina 1 e bobina
Le immagini generate da ogni singola bobina devono essere successivamente elaborate e “messe insieme” in modo da formare un’immagine globale.
Esistono vari metodi per la combinazione di immagini ottenute da bobine phased-array, con l’obiettivo di massimizzare il rapporto segnale-rumore (SNR) dell’immagine finale. In questo lavoro di tesi verranno analizzati ed implementati due algoritmi di ricostruzione, uno che permette di ottenere l’immagine globale a partire dalla conoscenza o dalla stima delle mappe di sensibilità delle singole bobine che compongono l’array, l’altro che permette di effettuare la ricostruzione a prescindere dalla suddetta conoscenza delle mappe dei campi RF.
Indicando con pi il valore del pixel nel punto (x,y,z) dovuto alla bobina
i-esima dopo l’applicazione della Trasformata di Fourier, in generale la combinazione ottima delle immagini produce il valore P nel punto (x,y,z) dato dall’espressione:
b
R
p
P
=
λ
T −1(3.1) dove pè il vettore complesso dei pi, λ è un fattore di scala, R è la
matrice delle resistenze mutue di rumore tra le bobine e b è il vettore colonna dei campi trasversi generati nel punto (x,y,z).
3.2 Metodo SoS
E’ la metodica che permette la ricostruzione dell’immagine a prescindere dalla conoscenza delle mappe di sensibilità delle bobine a radiofrequenza. Si basa sul presupposto che, poiché il segnale NMR è proporzionale al campo RF locale, le immagini sono loro stesse una stima delle intensità e delle direzioni dei campi magnetici. Più alto è il SNR e migliore sarà la stima.
Partendo dai segnali delle singole bobine la combinazione a cui si giunge con la metodica SoS è espressa dall’equazione:
∗ −
=
p
R
p
P
T 1(3.2) dove P(x,y,z) è il segnale del pixel considerato dato da tutto l’array, cioè:
1 2 p = . . n p p p
con pi valore complesso del pixel in (x,y,z) dovuto alla i-esima bobina, R è la matrice delle resistenze di rumore, pT è la matrice trasposta di p e p* è il vettore colonna con i complessi coniugati dei pi.
Sotto le ipotesi che:
- la matrice R sia diagonale (Rij=0 ∀ i≠j), che corrisponde ad avere le bobine perfettamente disaccoppiate fra loro;
- la matrice R abbia tutti gli elementi della diagonale uguali fra loro
(Rii=Rjj=R ∀ i,j), ossia tutte le bobine presentano lo stesso rumore. In tali condizioni l’espressione 3.2 diviene:
(
)
* * * 1 2 1 2 n np
1/ R
0
p
P=
p
p
. . p
0
0
.
=
.
0 1/ R
p
0
0
O
(
)
* * * 1 2 1 2 n np
p
=
p /R
p /R
. .
p /R
.
=
.
p
n n * * i=1 i=1 i i i i1
1
p p
p p
R
R
=
∑
=
∑
=
n 2 i=1 i 1 p R =∑
(3.3)Quindi con un array di bobine perfettamente disaccoppiato ed equalizzando i rumori dei diversi segnali, è possibile applicare il metodo SoS effettuando un calcolo solo sui moduli ossia sulle intensità dei pixel delle singole immagini.
Vediamo di ricavare, adesso, l’espressione, da impiegarsi nella pratica, per il calcolo della stima del segnale secondo l’algoritmo SoS.
Ogni pixel dell’immagine è caratterizzato da un’intensità di segnale Si
proveniente dalla bobina i-esima tra le n di cui è composto l’array:
i i
i b e
S = ρ + (3.4) dove ρ è il segnale NMR, bi è la sensibilità della bobina i-esima e ei è il
rumore in uscita dalla bobina i-esima.
Assumendo una correlazione nulla tra le bobine, la stima ottima (Popt) di
ρ si calcola con la formula seguente:
∑
∑
= i i i j j opt Sb b P 1 2 * (3.5) con j=1….n.Dato che la conoscenza sperimentale dei bi è molto difficile da ottenere,
è possibile ricavarne una stima impiegando la:
∑
= k k i i S S b 2 1 (3.6) con k=1….n.Sostituendo la (3.6) nella (3.5), si ottiene la stima del segnale secondo la tecnica SoS (Sum-of-Squares):
∑
= k k SoS S P 2 (3.7)Riassumendo, quindi, la combinazione delle immagini secondo la tecnica SoS viene effettuata effettuando la radice quadrata della somma dei quadrati delle intensità di ciascun pixel delle immagini di partenza. Applichiamo adesso la metodica SoS alle due immagini prese come esempio, mostrate nella Fig. 3.1.
Se si indica con S1 la matrice dei pixel corrispondente all’immagine 1 e
con S2 quella relativa all’immagine 2, la combinazione SoS fornisce, per
l’immagine finale: 2 2 2 1 S S SSoS = + (3.8) che può essere visualizzata nella figura seguente:
3.3 Equalizzazione del rumore
L’applicazione della metodologia SoS alle immagini iniziali, come descritta nel paragrafo precedente, può risultare non ottimizzata quando le due immagini sono affette da rumore in quantità diversa, cioè quando le deviazioni standard del rumore che, inevitabilmente, si sovrappone alle immagini, sono diverse. Questo può essere dovuto sia alla presenza di rumore non perfettamente identico nelle bobine sia all’aggiunta di rumore nelle fasi di condizionamento del segnale sui vari canali di ricezione. In questo lavoro di tesi si è studiato un metodo per equalizzare il rumore di fondo nelle immagini singole prima di applicare la SoS. Innanzitutto si calcolano le deviazioni standard di rumore sulle due immagini, andando a misurarne i valori in quattro zone dette ROI (Region Of Interest) in posizione esterna al fantoccio (dove, quindi, non è presente il segnale ma solo il rumore) e facendone la media aritmetica, ricavando un valore di deviazione standard di rumore per ogni immagine.
Per il caso delle due immagini mostrate in Fig. 3.1, si calcolano i seguenti valori:
Deviazione standard bobina 1:
σ
1 =33.45 Deviazione standard bobina 2: σ2 =59.92Il processo di equalizzazione viene effettuato andando a “pesare” i pixel dell’immagine più rumorosa (cioè con il valore più elevato di deviazione standard) con il rapporto tra le deviazioni standard minima e massima. Indicando, quindi, con Smin le intensità di segnale dei pixel
dell’immagine con deviazione standard minore (σmin, nel caso in esame
1
σ
) e con Smax le intensità dei pixel dell’immagine con deviazionestandard maggiore (σmax, nel nostro caso σ2), il segnale ricostruito viene
ricavato con la formula:
(
)
max 2 max min 2 min * + = S S Sequal σ σ (3.9) Per il caso analizzato, il rapporto di equalizzazione vale 0.56.Applicando, quindi, la formula 3.9 si ottiene l’immagine corrispondente all’algoritmo SoS dopo equalizzazione del rumore di fondo, come visibile in Fig. 3.3:
Come si nota dal raffronto tra le immagini di Fig. 3.2 e 3.3, la SoS equalizzata fornisce un’immagine molto più omogenea rispetto a quella relativa alla SoS.
E’ possibile estendere al caso generico di un phased-array composto da N bobine la suddetta formula, che diventa:
(
)
1 2 1 min 2 2 2 min 2 1 1 min 2 min * * ... * + + + = − − N N equal S S S S S σ σ σ σ σ σ(3.10) che, in pratica, significa: pesare ciascuna immagine per il rapporto tra la deviazione standard minima e quella relativa all'immagine considerata. Applichiamo, adesso, l’algoritmo della SoS a due immagini di una spalla ottenute con due bobine diverse, mostrate nella figura seguente:
Fig. 3.4 Immagini di una spalla ottenute con due bobine separate (Bobina 1 e bobina 2)
L’algoritmo SoS fornisce la seguente immagine:
Fig. 3.5 Combinazione SoS
Vediamo, adesso, di equalizzare i rumori di fondo, per applicare il metodo SoS equalizzato.
Per le due immagini, si calcolano i seguenti valori: Deviazione standard bobina 1:
σ
1 =83Deviazione standard bobina 2: σ2 =50
che forniscono un rapporto di equalizzazione pari a 0.6.
L’applicazione dell’algoritmo fornisce la seguente immagine:
L’immagine differenza tra la SoS e la SoS equalizzata è:
Fig. 3.7 Differenza tra SoS e SoS equalizzata
Come si nota dall’esame delle figure 3.5 e 3.6 e, principalmente, della 3.7, la SoS equalizzata fornisce un’immagine molto più omogenea e meno rumorosa e evidenzia preziosi dettagli anatomici in più rispetto alla convenzionale SoS.
3.4 Stima del campo
Alternativamente alla metodica SoS, conoscendo la mappa dei campi RF delle bobine (i bi) ed applicando l’equazione 3.1, si ottiene la
combinazione ottima per le immagini MR, quella che fornisce il più alto valore di rapporto segnale-rumore (SNR) sull’immagine ricostruita. Il problema è che, spesso, la conoscenza di tale mappe non è nota a priori e per la stessa bobina può variare a seconda dell’entità del carico, cioè dell’organo biologico al quale la bobina è dedicata.
In questo lavoro di tesi abbiamo sviluppato e testato due metodi per ricavare la mappa dei campi a radiofrequenza direttamente dalle immagini MR.
Il primo metodo impiega una finestra di “smoothing” da applicare sulle immagini ricavate dalle due bobine.
L’equazione di partenza è ancora la 3.4, che per comodità riportiamo:
i i
i b e
S = ρ + (3.11) L’idea di base è che, essendo i bi (mappe di sensibilità delle bobine) variabili “lentamente” sull’immagine, all’aumentare della larghezza della finestra di smoothing, Si tende a bi.
E’ stato applicato lo smoothing spaziale descritto dal seguente algoritmo (A è la matrice): = =
∑
− = + − 1 0 2 / i w/2,....,N-w 1 altrimenti w j w j i i i A w A S (3.12)impiegando una finestra di larghezza abbastanza ampia, le immagini “smoothate”, per le considerazioni già fatte per cui Si →bi, sono loro stesse le stime delle mappe di sensibilità delle bobine RF (b1 e b2).
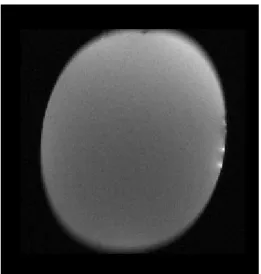
Per verificare la bontà dell’algoritmo, è stato testato su un’immagine della quale si conosceva anche l’andamento del campo magnetico RF
della bobina che l’ha generata. In Fig. 3.8 è rappresentata l’immagine, relativa ad una colonna lombare:
Fig. 3.8 Immagine MR
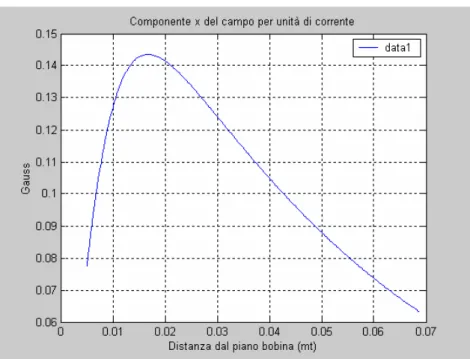
In Fig. 3.9 viene rappresentata la curva di campo (sensibilità) lungo l’asse centrale della bobina che ha prodotto l’immagine 3.8.
Applicando lo smoothing spaziale (secondo l’algoritmo descritto nell’espressione 3.12) sull’immagine impiegando una finestra abbastanza larga, si ottiene, ovviamente, un’immagine molto degradata, visibile nella figura 3.10:
Fig. 3.10 Immagine MR “smoothata”
Ricavando i profili dell’immagine (lungo l’asse orizzontale) dopo che è stata sottoposta al processo di smoothing si ottiene qualcosa di molto simile all’andamento del campo della bobina che ha creato l’immagine, si veda la Fig. 3.11 a confronto con la 3.9. Il metodo di calcolo della mappa dei campi RF, che impiega il filtraggio di smoothing, fornisce risultati molto incoraggianti e simili a quelli previsti.
Fig. 3.11 Curva di sensibilità della bobina stimata sull’immagine “smoothata”
A questo punto abbiamo applicato l’algoritmo di smoothing spaziale alle immagini di Fig. 3.4 e, impiegando una finestra larga 50, le immagini “smoothate” sono risultate le seguenti:
Le due immagini ottenute sono un’ottima stima delle mappe di sensibilità delle bobine ma si nota anche la presenza di evidenti artefatti “a stella” nelle zone a transizione veloce; per ovviare a questo inconveniente si è, quindi, pensato di utilizzare una finestra di Hanning sulle immagini iniziali, descritta dalla formula:
1 ..., 1, , 0 ), / 2 cos( * ) 1 ( ) (k = − − k N k = N− w α α π (3.13) dove α vale 0.5 per la finestra di Hanning.
Le due immagini iniziali, dopo il filtraggio Hanning 60x60 (convoluzione), divengono quelle mostrate in Fig. 3.13.
Fig. 3.13 Immagini ottenute dopo l’applicazione del filtro di Hanning
Tenendo ancora presente l’espressione 3.11, applichiamo la formula descritta nell’articolo di Roemer che fornisce la stima ottimale per ρ:
∑
= i i i i opt b S P ω (3.14)dove i pesi ωi sono dati da:
∑
= j j i i b b 2 2 ω (3.15) quindi, sostituendo:∑
∑
= i i i j j opt Sb b P * 2 1 (3.16)L’espressione finale che permette di calcolare la stima ottima, secondo questo algoritmo denominato SUPER, è descritta nella 3.17:
opt k
k
SUPER b P
P =
∑
2 (3.17)Nel caso che stiamo esaminando, riferito ad un array costituito da due bobine, sostituendo la 3.16 nella 3.17, dopo alcuni passaggi si ottiene:
2 2 2 1 2 2 1 1 b b b S b S SSUPER + + = (3.18)
dove gli Si sono le due immagini iniziali ed i bi sono le mappe di
sensibilità delle bobine (immagini dopo il filtraggio Hanning).
Il caso dell’applicazione dell’algoritmo SUPER sulle immagini equalizzate fornisce: 2 2 2 1 2 2 1 1 b b b S r b S SSUPER + + = (3.19)
dove r è il rapporto di equalizzazione. Come nel caso della SoS
equalizzata, in pratica, l’immagine più rumorosa viene moltiplicata per un peso dato dal rapporto di equalizzazione r. In Fig. 3.14 il risultato:
Fig. 3.14 Super equalizzata e filtro di Hanning
Per effettuare un confronto tra l’algoritmo Super e quello SoS e dimensionare, quindi, la finestra di Hanning nel modo ottimale, sono state provate finestre di Hanning di varie dimensioni ed è stata scelta, infine, la dimensione che permette la massimizzazione della traccia della matrice differenza tra le immagini SoS e Super.
Nella figura seguente sono visualizzate le due immagini dopo l’applicazione della finestra ottimale di Hanning (8x8):
Fig. 3.15 Immagini filtrate con Hanning ottimale
e l’immagine differenza tra la SoS e la Super risulta:
Fig. 3.16 Differenza tra SoS e Super equalizzate
Per verificare l’effetto dei vari algoritmi sul grado di omogeneità del segnale e sul rumore presente sulle immagini, sono stati ricavati i profili dell’intensità di segnale su alcune linea orizzontali e verticali sulle due immagini finali (SoS equalizzata e Super equalizzata).
Ecco alcuni risultati:
Come si vede dall’analisi delle figure precedenti, l’algoritmo Super è leggermente più efficiente di quello SoS nell’abbattimento del rumore di fondo delle immagini.
Nel confrontare le immagini SoS e Super occorre, comunque, tener presente che la differenza δ tende ad aumentare sia al diminuire del SNR che all’aumentare del numero delle bobine (N) che compongono l’array, come descritto dalla equazione:
2 1 SNR N− = δ (3.20) se ne deduce che l’algoritmo Super è tanto più efficiente rispetto a quello SoS tanto più il phased-array è costituito da un maggior numero di bobine. A tal proposito, si sottolinea il fatto che la Esaote Biomedica s.p.a. (Genova), azienda che produce scanner MR a basso campo, ha scelto l’implementazione dell’algoritmo Super per la ricostruzione di immagini proprio alla luce dei risultati ottenuti e descritti nel presente