Capitolo 3
3.1 Imaging RM dinamico
L’imaging RM dinamico cattura un oggetto in movimento attraverso l’acquisizione di una serie di immagini ad alta velocità. Concettualmente l’approccio corretto sarebbe acquisire la totalità dei dati per ricostruire ogni istante di tempo separatamente. Questo richiede che l’acquisizione di ogni istante di tempo sia relativa al movimento dell’oggetto in modo tale da ottenere un’istantanea.
Nel tempo sono state proposte un gran numero di strategie per favorire l’incremento della velocità di acquisizione attraverso la riduzione di un certo fattore del numero di dati acquisiti, che è il fattore di accelerazione. Queste strategie sono capaci di ridurre il tempo di acquisizione dei dati senza compromettere la qualità dell’immagine, poiché tipicamente una serie di immagini mostra un alto grado di correlazioni spaziotemporali. C’è perciò una certa ridondanza di informazioni all’interno dei dati. In generale queste strategie possono essere divise in tre categorie, basate sull’utilizzo di correlazioni nel k-spazio, nel tempo, o in entrambi.
Il primo approccio, basato sull’utilizzo delle correlazioni nel k-spazio, include un’ampia varietà di metodi: il metodo Fourier parziale, imaging parallelo e metodi che si basano sull’informazione precedente ( vedi tabella 1, Cap. 1). Questi metodi velocizzano l’acquisizione collezionando solo una frazione del k-spazio ad ogni istante di tempo. Sebbene tali metodi differiscano significativamente nelle loro tecniche di recupero dei dati mancanti, essi sono tutti basati sul principio che ogni punto del k-spazio contiene alcune informazioni circa gli altri punti del k-spazio. Questa correlazione può essere usata per recuperare i dati mancanti.
Il secondo approccio, basato sull’utilizzo delle correlazioni temporali, include metodi come keyhole e varie strategie view-sharing ( tabella 1, Cap. 1 ).In
questi metodi il k-spazio è in seguito aggiornato, ma la velocità di aggiornamento può variare per differenti porzioni del k-spazio. I dati misurati ad una data posizione del k-spazio formano una serie di campioni nel tempo. I dati mancanti a tutti gli altri istanti di tempo possono allora essere interpolati o estrapolati da questi campioni usando diversi schemi. Indifferentemente dalla scelta dell’interpolatore, ogni punto del k-spazio è ricostruito separatamente dagli altri punti.
Il terzo approccio, basato sull’utilizzo delle correlazioni sia nel k-spazio che nel tempo, è una combinazione dei due approcci sopra descritti. Quindi, un dato punto mancante è stimato sulla base degli altri punti disponibili, tipicamente sulla sua vicinanza sia nello spazio che nel tempo. Il vantaggio di questo approccio è che sfrutta molte delle correlazioni più rilevanti, quindi migliora la stima dei dati mancanti. Esempi di questo approccio sono il metodo UNFOLD (UNaliasing by Fourier-encoding the Overlap using the temporaL Dimension ) e un metodo sviluppato indipendentemente da Willis e Bresler. Entrambi questi metodi, però, riescono ad ottenere buoni risultati solo per un fattore d’accelerazione 2.
Più recentemente sono stati sviluppati due nuovi metodi per l’analisi dell’imaging dinamico, anch’essi si possono inserire nel terzo approccio prima descritto, ovvero usano le correlazioni dei dati sia nello spazio che nel tempo, e consentono alti fattori di accelerazione a differenza dei metodi sopra citati. Questa alta accelerazione è ottenibile a spese di una più rumorosa amplificazione durante la ricostruzione. Tuttavia tale rumore non compromette in modo pesante la qualità delle immagini.
Questi metodi sono chiamati k-t BLAST (Broad-use Linear Acquisition Speed-up Tecnique) e k-t SENSE (SENSitivity Encoding), la differenza sostanziale fra i due è che il primo fa uso di una singola bobina ricevitrice, mentre il secondo usa un array di bobine ricevitrici.
La necessità di ottenere dei tempi di scansione corti, senza compromettere la risoluzione, nasce da una serie di motivazioni di importanza pratica. Più questi tempi sono corti, più si riduce la sensibilità della scansione ai movimenti di sottofondo, quindi migliora l’accuratezza delle misurazioni. Se, ad esempio, il tempo di scansione si adattasse alla durata di un’apnea, si risolverebbe il
problema del movimento respiratorio, rimuovendo così una fonte estranea di movimento.
Inoltre con un tempo di scansione corto si potrebbero misurare informazioni addizionali, quali la distribuzione di velocità all’interno di ogni singolo voxel, l’accelerazione, e altri.
3.2 K-t BLAST e K-t SENSE
La RM dinamica acquisisce righe di dati nel k-spazio a differenti istanti di tempo, t.
La ricostruzione di una serie di immagini dinamiche coinvolge i segnali dell’oggetto nel k-t spazio attraverso il campionamento discreto dei dati. In accordo con le proprietà della trasformata di Fourier, il campionamento discreto nello spazio k-t, porta ad una convoluzione dei segnali dell’oggetto, nel reciproco spazio x-f, con una point spread function (funzione di punti sparsi) data dalla trasformata del piano di campionamento. “x” e “f” sono gli assi coniugati di “k” e “t” dopo la trasformata di Fourier. Qui essi si riferiscono rispettivamente all’asse spaziale ( lungo la direzione phase-encoding ) e alla frequenza temporale. Noi focalizzeremo l’attenzione su l’imaging dinamico in 2D, tuttavia tali metodi sono utilizzabili per qualunque numero di dimensioni spaziali.
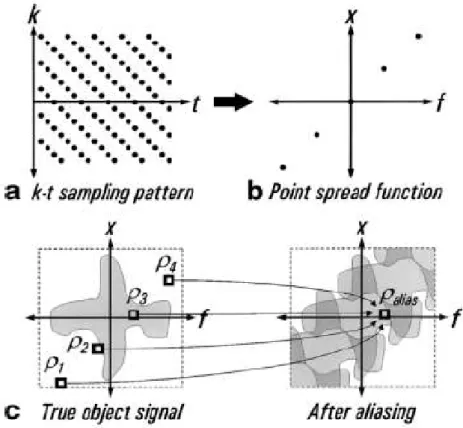
Figura 1 mostra un piano di campionamento k-t avente una struttura che può essere vista come una griglia obliqua o come una griglia ruotata. Ad ogni istante di tempo il k-spazio è campionato in modo cartesiano, la direzione frequency–encoding è omessa per semplicità. Essa è orientata perpendicolarmente alla pagina ed è ricostruita attraverso la trasformata di Fourier. L’asse “k” in figura si riferisce alla linea phase-encode. AD ogni istante di tempo t, sono acquisiti linee phase-encode regolarmente spaziate. Altri insiemi, di tali linee, sono acquisiti ai successivi istanti di tempo.
Come per la struttura del piano di campionamento, anche la point spread function nello spazio x-f ha una struttura a grata (Fig. 1b). Il campionamento nello spazio k-t è, quindi, finito e la point spread function è, a rigore, una
sovrapposizione di funzioni sinc shiftate. Nell’imaging ad alta risoluzione, le funzioni sinc hanno larghezza ridotta, così la point spread function può essere approssimata ad un insieme di funzioni delta poste su una grata, questo semplifica molto la trattazione.
La convoluzione con tale point spread function porta ad una replica periodica dei segnali dell’oggetto. Figura 1c mostra l’effetto sui segnali dell’oggetto nello spazio x-f.
Figura 1. a: Piano di campionamento nello spazio k-t per un fattore di accelerazione di 4.
Questo piano di campionamento equivale a campionare su una griglia. b: Point spread function risultante dalla trasformata di Fourier del piano di campionamento. c: segnale originale nello spazio x-f ( a sinistra) e risultato della convoluzione di questo con la point spread function, ne risulta un aliasing nel quale ρ1, ρ2, ρ3 e ρ4 sono mappati all’interno
di un singolo voxel ρalias. [Rif. 7]
La convoluzione mappa i segnali da diverse locazioni in un’unica locazione
alias
ρ , quindi risulta un aliasing. E’ questo l’effetto di un sottocampionamento: per ottenere un fattore di accelerazione pari a 4, è necessario che il piano di
campionamento torni a campionare lo stesso punto ogni 4 istanti di tempo, questo provoca 4 repliche nello spazio x-f che si sovrappongono, ovvero l’aliasing.
Notare che l’aliasing avviene tra voxel che hanno diversa posizione spaziale e differente frequenza temporale. Matematicamente questo aliasing è descritto come:
[
]
ρ ρalias ρ ρ ρ ρ = = 1 1 1 1 1 4 3 2 1 (1)L’equazione (1) è indeterminata, ci sono quindi un numero infinito di soluzioni che la soddisfano. Il lavoro di ricostruzione è trovare una soluzione adeguata a risolvere il problema dell’aliasing in modo da ottenere l’immagine originale a seguito del sottocampionamento. I metodi che vediamo fanno uso di informazioni addizionali che si ottengono facilmente nella pratica.
L’equazione (1) si riferisce ad un caso semplificato nel quale sono coinvolti solo quattro voxel, in generale la soluzione all’eq. (1) deve minimizzare la seguente norma pesata:
∑
i i i m 2 ρ (2)dove m è la stima delle grandezze dei segnali.i
Quindi la proposta della k-t BLAST è stimare il segnale originale ρ attraverso
alias
ρ , e la soluzione ottimale regolarizzata è data da:
(
ψ)
(
ρ ρ)
ρ
dove ρ denota la stima della linea-base (la media temporale dei dati sottocampionati) di ρ, Θ denota la matrice di covarianza
(
ρ−ρ)(
ρ−ρ)
H , E è la matrice di encoding, e ψ è la varianza del rumore. L’apice H indica la trasposta complessa coniugata e l’apice + indica la pseudoinversa di Moore-Penrose.Nell’equazione (3) le informazioni precedenti della distribuzione del segnale, utili per un’ottima ricostruzione, sono contenute nella matrice Θ. Risolvendo tale equazione si ottiene la ricostruzione dei segnali dell’oggetto nello spazio x-f, applicando poi la trasformata inversa di Fourier lungo f si ottengono i segnali dell’oggetto nello spazio x-t, i quali corrispondono alla serie delle immagini nel tempo.
Per avere il metodo k-t SENSE basta inserire all’interno della matrice di encoding le informazioni sulle sensibilità delle bobine, inserendo dunque una matrice di sensibilità.
Esaminiamo per ora il metodo k-t BLAST.
In linea generale durante tale metodo avvengono due fasi distinte: una fase di acquisizione, nella quale ha luogo il sottocampionamento, e una fase di training. Quest’ultima consiste in una scansione dello spazio a bassa risoluzione spaziale (viene per questo campionato solo il centro del k-spazio). Nella ricostruzione, la matrice di covarianza Θ viene rimpiazzata con una matrice diagonale 2
(
1 2, 2 2, 2)
N m m m diagM = , dove m rappresenta la stimai
dei segnali nel piano x-f degli N punti affetti da aliasing. Tali valori sono ottenuti direttamente dalla ricostruzione dello spazio x-f nella fase di training, si veda Figura 2. Quindi la formula di ricostruzione diventa:
= +
(
+)
(
−)
= + f x alias H f x H f x f x M E EM E E , 2 , 2 , , ψ ρ ρ ρ ρ (4a)
[
]
(
alias x f)
N H N f x E m m m m m m , 2 2 2 2 1 2 2 2 2 1 , , , ρ ρ ψ ρ − + + + + (4b)Tale equazione di ricostruzione può essere rappresentata nella forma di un filtro adattivo, il quale è moltiplicato per i dati sottocampionati (ρalias) nello
spazio x-f per ricostruire il segnale non affetto da aliasing. Tale filtro F è dunque:
[
]
ψ + + + = 2 2 2 2 1 2 2 2 2 1 , , N H N m m m m m m F (5)Per maggior chiarezza si veda Figura 2, per i passi interni alle fasi di acquisizione (undersampling) e training, si vedano Figura 3 e Figura 4.
Da notare che le approssimazioni usate nell’equazione (4) deviano dalla ricostruzione ottimale (eq. (3) ) per due importanti aspetti. Primo, essa include solamente gli elementi diagonali della matrice di covarianza, il vantaggio di usare solo tali elementi è la stabilità, allora il filtro (eq. (5)) ha valori minori o uguali ad uno così il rumore non viene amplificato durante la ricostruzione. Il secondo aspetto è che la fase di training ha bassa risoluzione spaziale, quindi la stima degli elementi diagonali non è esatta.
Entriamo ora nel particolare delle varie fasi.
Solitamente per la fase di training vengono presi meno istanti di tempo rispetto a quelli presi nella fase di acquisizione.
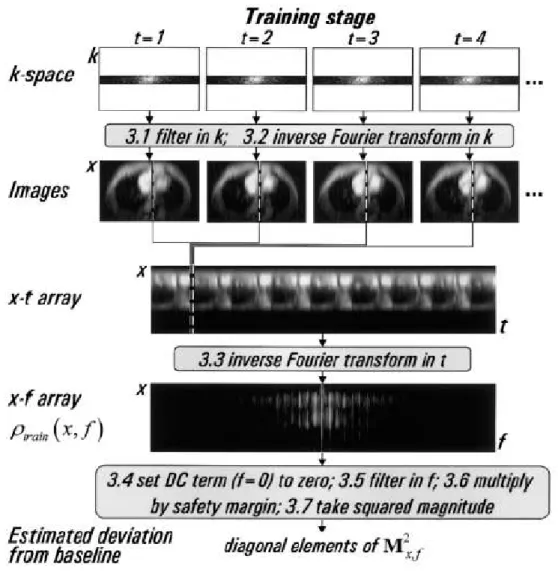
Figura 2: Principali passi nella fase di training della k-t BLAST. Tali passi sono simili per la
k-t SENSE, nella quale in più si ha un passaggio che combina i dati provenienti da tutte le bobine usando SENSE. [Rif. 7]
Figura 3 mostra i vari passaggi all’interno della fase di training, si vede che vengono acquisite solo poche linee phase-encode centrali ad ogni istante di tempo nel k-spazio e lo spazio non acquisito viene riempito con zero.
Il filtraggio applicato alle righe di dati nel k-spazio allo step 3.1 è opzionale, esso riduce gli artefatti dovuti al troncamento. Il secondo passaggio (step 3.2) prevede la trasformata inversa di Fourier applicata lungo k, si ottengono delle immagini a bassa risoluzione. Il passo successivo comporta che ogni posizione frequency-encoded sia processata separatamente come indica la linea tratteggiata in figura. Quindi (step 3.3) si esegue la trasformata di Fourier lungo t, si ottiene così un array x-f detto ρtrain
(
x,f)
. Il termine temporalmente invariante (cioè il termine direct-current o DC, quindi ρtrain( )
x,0 ) è settato a zero (step 3.4). Il filtraggio in f è anch’esso opzionale ed è utile per ridurre il rumore (step 3.5). La necessità di moltiplicare l’array per un certo fattore di scala serve a fornire un margine di sicurezza attraverso l’attenuazione della regolarizzazione (step 3.6) .Un alto valore di questo fattore consente a più caratteristiche di essere ricostruite a spese, però, di un aumento del rumore. Prendendo poi l’ampiezza al quadrato dell’array (cioè ρtrain(
x, f)
2) vengono prodotti gli elementi della diagonale della matrice Mx2, f (step 3.7) utile nellaformula di ricostruzione.
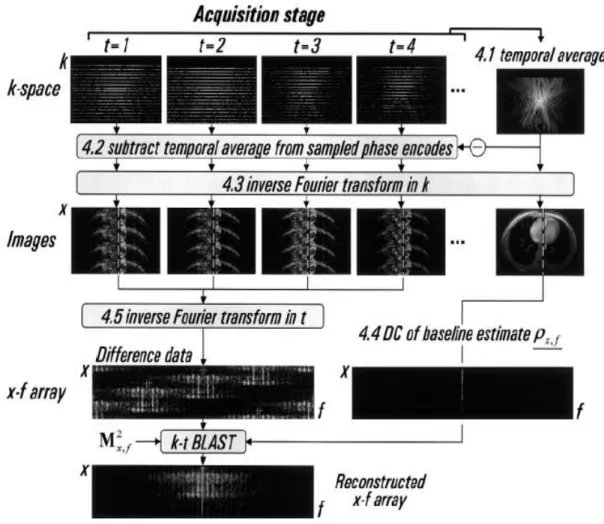
Per ottenere la stima della linea-base ρx,f i dati nello spazio k-t vengono sottocampionati nella fase di acquisizione (Figura 4). Come primo passo (step 4.1) si ottiene la media temporale dai dati sottocampionati lungo t. La media temporale viene prima sottratta ai corrispondenti dati per ogni istante di tempo (step 4.2).
Sia i dati risultanti dalla sottrazione, sia la media temporale subiscono una trasformata di Fourier in k, questo produce un’immagine temporalmente media e una serie di immagini affette da aliasing. (step 4.3). Ogni posizione frequency encoding ( in figura la linea tratteggiata) viene processata separatamente, ovvero per ognuna di tali posizioni si procede come segue: dall’immagine temporalmente media si ricava, per quella data posizione, la stima della linea-base ρx,f (step 4.4), per tutte le altre f, il valore di ρx,f viene settato a zero.
Dalla serie di immagini affette da aliasing, sempre per la posizione corrispondente allo step 4.4, si ricava un array x-t e si esegue una trasformata di Fourier lungo t, ottenendo un array x-f (step 4.5) che rappresenta la matrice
alias
ρ nella formula di ricostruzione.
Figura 4. Principali passaggi della fase di acquisizione per il metodo k-t BLAST. Tali
passi sono simili per la k-t SENSE, i dati provenienti da tutte le bobine sono combinati durante lo step finale della ricostruzione. [Rif. 7]
A questo punto abbiamo a disposizione tutte le informazioni necessarie per applicare la formula di ricostruzione data dall’eq. (3) ottenendo delle immagini nelle quali l’aliasing è effettivamente risolto.
Tornando quindi alla figura 2, essa mostra in parallelo le fasi sopra descritte. Colonna 1, mostra un esempio di campionamento pieno dei dati. Riga B mostra
la serie di immagini risultanti dal campionamento descritto nella riga A. Riga C e D mostrano lo spazio x-t e il corrispettivo spazio x-f per una singola posizione frequency- encoded indicata dalla linea tratteggiata nella riga B, questo metodo quindi richiede che le posizioni frequency-encoded vengano studiate separatamente. Colonna 2 mostra come, un sottocampionamento creato per ottenere un fattore di accelerazione 5, modifichi gli array esaminati, in questo caso lo spazio x-f mostra un aliasing prodotto dalla sovrapposizione di 5 repliche. Quanto detto equivale alla fase di acquisizione. Colonna 3 mostra la fase di training usata nella ricostruzione, ne risultano immagini a bassa risoluzione (righe B, C, D) queste informazioni a bassa risoluzione sono usate per il filtro di ricostruzione nel metodo K-t BLAST come mostra la riga E. L’applicazione di questo filtro recupera i segnali unaliased.
A questo punto noi abbiamo a disposizione un valido e efficace metodo di ricostruzione che ci permette di ridurre i tempi di scansione , senza provocare un eccessivo peggioramento della qualità dell’immagine.
![Figura 2: Processo di ricostruzione tramite K-t BLAST di una serie di immagini cardiache.[Rif.9]](https://thumb-eu.123doks.com/thumbv2/123dokorg/5674339.72245/7.892.171.742.623.1031/figura-processo-ricostruzione-tramite-blast-serie-immagini-cardiache.webp)