Departament de F´ısica Aplicada i `Optica Universitat de Barcelona
An´
alisis de la influencia de las aberraciones del sistema
difractor en el reconocimiento de im´
agenes por
correlaci´
on ´
optica
Julio D. P´erez Tudela
Parte I
Fundamentaci´
on te´
orica
Cap´ıtulo 1
Reconocimiento de formas por
correlaci´
on ´
optica
1.1.
Introducci´
on
Dentro de la denominaci´on “reconocimiento de formas” se engloban todos aquellos m´etodos mediante los cuales es posible detectar la presencia de una determinada ima-gen, denominada imagen de referencia, dentro de otra imagen compleja, que recibe el nombre de escena. En el caso en que dicha imagen de referencia se encuentre presente en la escena, algunos de estos m´etodos permiten adem´as determinar su posici´on. Esta disciplina ha ido adquiriendo en los ´ultimos a˜nos una relevancia especial dentro del campo del procesado de im´agenes debido principalmente a la constante y progresi-va automatizaci´on de la mayor´ıa de procesos industriales, as´ı como al desarrollo de nuevas l´ıneas de innovaci´on tecnol´ogica, tales como la inteligencia artificial, la visi´on por computador o la teledetecci´on.
Existe una gran variedad de t´ecnicas asociadas al reconocimiento de formas y al tratamiento de im´agenes, y en funci´on de los elementos que utilizan podemos cla-sificarlas en t´ecnicas ´opticas, digitales e h´ıbridas. El primer tipo, como su propio nombre indica, utiliza un conjunto de elementos ´opticos para realizar el procesado, lo que garantiza una alta velocidad de procesado, pero plantean problemas debido a su limitada flexibilidad. Por el contrario, las t´ecnicas digitales basan su funcionamiento fundamentalmente en algoritmos ejecutados en un ordenador, aunque el alto coste temporal de algunos de ellos se contrapone a su flexibilidad y potencia. Una buena posibilidad resulta trabajar con t´ecnicas h´ıbridas, las cuales intentan aprovechar las
ventajas de cada uno de ambos m´etodos y al mismo tiempo minimizar los efectos de sus inconvenientes.
Dentro del conjunto de t´ecnicas ´opticas, destacan especialmente aquellas basadas en la comparaci´on entre los elementos de la escena y la imagen que se quiere detec-tar. Esta comparaci´on se realiza fundamentalmente mediante el desplazamiento de la imagen de referencia a lo largo y ancho de la imagen, de manera que se obtiene un conjunto de valores, tanto m´as elevados cuanto m´as similares son dicha imagen y la imagen correspondiente presente en la escena compleja. De este modo, la posici´on del valor m´aximo obtenido permite determinar la presencia de la imagen a detectar. Este proceso de comparaci´on y asignaci´on posterior de valores recibe el nombre de corre-laci´on. Presenta una serie de inconvenientes, como por ejemplo que ´unicamente se puede utilizar para detectar formas del mismo tama˜no e id´entica orientaci´on, aunque exiten m´etodos [HG78, CL78b, HA82a, HA82b] que solventan dichas dificultades.
1.2.
Fundamentos de la correlaci´
on ´
optica
La correlaci´on entre dos funciones se puede expresar como: (f ⊗ g)(r) =
Z
Rn
f (r0)g∗(r0− r)dr0 (1.1)
A partir de esta expresi´on se puede observar c´omo la correlaci´on se obtiene al despla-zar la funci´on g∗ (conjugada de g), multiplicar su valor en cada punto r0
por el valor de la funci´on f en dicho punto y realizar la suma para todos los puntos considerados. Los diferentes sumandos ser´an no nulos s´olo si al desplazar la funci´on g∗ a un punto
cualquiera r0 existe una zona com´un entre ambas funciones. Adem´as, cuanto mayor
sea el parecido, mayor ser´a su contribuci´on al total de la suma.
En el caso de que tanto f como g representen im´agenes, ´estas ser´an descritas ´ unica-mente mediante funciones bidimensionales, f (x, y) y g(x, y). Puesto que el concepto cl´asico de imagen va asociado a una distribuci´on bidimensional de valores de trans-misi´on, estas dos funciones tomar´an ´unicamente valores reales, y ser´an, por tanto, reales. En este caso, g∗(x, y) = g(x, y), y por lo tanto, como se ha comentado
ante-riormente, tanto mayor ser´a el valor de la correlaci´on cuanto mayor sea la similitud entre las funciones f (x, y) y g(x, y) trasladada. As´ı pues, la correlaci´on resulta a prio-ri un buen mecanismo para reconocer un objeto determinado dentro de una escena formada por varios elementos.
1.3. Difract´ometros 13 Una de las propiedades matem´aticas de esta operaci´on es el denominado Teorema de Convoluci´on [Goo68], el cual permite obtener la correlaci´on de dos funciones
f (x, y) y g(x, y) a partir del producto en el espacio complejo de sus transformadas
de Fourier respectivas, F (u, v) y G(u, v).
TF{f (x, y) ⊗ g(x, y)} = F (u, v)G∗(u, v) (1.2) Por lo tanto, es posible realizar este producto en el espacio de Fourier, y posterior-mente, mediante una transformada inversa, obtener el valor de f (x, y) ⊗ g(x, y) sin necesidad de realizar la integral reflejada en la expresi´on 1.1.
La posibilidad de utilizar lentes para realizar las transformadas de Fourier permite dise˜nar montajes ´opticos relativamente simples que posibilitan la obtenci´on pr´actica-mente en tiempo real de la correlaci´on. Esta propiedad de las lentes podr´ıa generali-zarse del siguiente modo:
al iluminar un objeto f (x, y) situado frente a una lente se obtiene, en el plano focal de la misma, el espectro de frecuencias de dicho objeto, es decir, la amplitud de la transformada de Fourier, multiplicado por una serie de factores de fase que ´unicamente dependen de las posiciones relativas entre el objeto y la lente. En general se obtendr´a una funci´on del tipo:
TF(u, v) ∝ F ( x
λd, y
λd) (1.3)
donde se han omitido t´erminos de proporcionalidad, y el valor de d de-pende de la configuraci´on utilizada (lente anterior o posterior al objeto, iluminaci´on convergente o paralela ...).
1.3.
Difract´
ometros
En condiciones de ´optica paraxial, se puede considerar el efecto de una lente en un frente de onda incidente como la modificaci´on de dicho frente de onda mediante la inclusi´on de un t´ermino de fase cuadr´atico de la forma tf(x, y) = e−j
k
2f(x2+y2), donde
f representa la distancia focal de la lente, con signo positivo o negativo seg´un el convenio de signos utilizado. Dicho t´ermino de fase se puede considerar como una aproximaci´on cuadr´atica a una onda esf´erica. Si la distancia focal f es positiva, la onda esf´erica es convergente hacia un punto situado en el eje ´optico a una distancia
f posterior a la lente, mientras que si la distancia focal f es negativa, la onda esf´erica
diverge desde un punto situado a una distancia f antes de la lente.
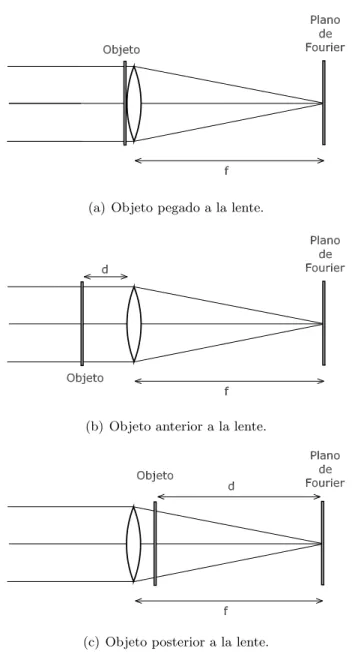
(a) Objeto pegado a la lente.
(b) Objeto anterior a la lente.
(c) Objeto posterior a la lente.
Figura 1.1: Configuraciones b´asicas de difract´ometros.
Como se ha comentado anteriormente, una de las propiedades m´as importantes y ´
utiles de las lentes es la posibilidad que ofrecen para realizar transformadas de Fou-rier bidimensionales de forma extremadamente simple, aprovechando las leyes de la propagaci´on y la difracci´on de la luz. Para ello se utilizan diversas configuraciones, la
1.3. Difract´ometros 15 geometr´ıa b´asica de tres de las cuales se presenta en la figura 1.1. En los apartados 1.3.1 y 1.3.2 se va a describir el comportamiento de cada una de estas configuraciones, siguiendo el esquema que se puede encontrar en [Goo68].
En los tres casos se utiliza una iluminaci´on monocrom´atica, que se propaga en forma de onda plana colimada, y la funci´on a transformar es introducida en el sistema me-diante la utilizaci´on de un dispositivo con una transmisi´on de amplitud proporcional al valor de dicha funci´on. Estos dispositivos pueden consistir en una simple trans-parencia fotogr´afica, o bien puede utilizarse SLM. Tanto en un caso como en otro, ´
unicamente se considerar´an como soportes f´ısicos de la funci´on de la cual queremos obtener su transformada.
1.3.1. Objeto anterior a la lente
Se tratar´a en primer lugar la situaci´on descrita en la figura 1.1(a), donde el objeto se encuentra situado junto a la lente y podemos considerarlo una funci´on t(x, y), que describe la amplitud de transmisi´on en un punto de coordenadas (x, y), y que se encuentra uniformemente iluminado por una onda plana de amplitud A que incide de forma perpendicular. Por lo tanto, en la lente incide una distribuci´on de luz dada por:
Ul(x, y) = At(x, y) (1.4)
Las dimensiones finitas de la lente pueden ser representadas asociando a la lente una funci´on de pupila P (x, y) del tipo:
P (x, y) = 1 dentro de la lente 0 en otro caso (1.5)
Por lo tanto, podemos escribir la distribuci´on de amplitud detr´as de la lente como:
Ul0(x, y) = Ul(x, y)P (x, y)e[−j k
2f(x2+y2)] (1.6) Para calcular la distribuci´on Uf(u, v) en el plano focal de la lente, aplicamos la ex-presi´on para la difracci´on de Fresnel [Mah01]:
Uf(u, v) = e[jkf ]
e[j2fk(u2+v2)]
jλf ×
+∞Z Z
−∞
Sustituyendo en esta expresi´on la correspondiente a la distribuci´on U0 l(x, y), obtene-mos: Uf(u, v) = e[jkf ]e [jk 2f(u2+v2)] jλf × +∞Z Z −∞
Ul(x, y)P (x, y)e[−jλf2π(xu+yv)]dxdy (1.8)
En el caso en que el objeto sea menor que la apertura de la lente, podemos obviar el t´ermino P (x, y), y por lo tanto:
Uf(u, v) = e[jkf ]e
[j2fk(u2+v2)]
jλf ×
+∞Z Z
−∞
Ul(x, y)e[−j2πλf(xu+yv)]dxdy (1.9)
lo que quiere decir que la distribuci´on de amplitud compleja en el plano focal de la lente equivale a la transformada de Fourier de la distribuci´on de luz transmitida por el objeto, excepto por los t´erminos de fase que preceden a la integral. Estos t´ermi-nos pueden despreciarse en el caso en que lo que t´ermi-nos interese sea la distribuci´on de intensidad, y no la amplitud compleja.
En el caso mostrado en la figura 1.1(b) el objeto se encuentra situado tambi´en en una posici´on anterior a la lente, pero a una distancia d de la misma. Si representamos por
Fo(fx, fy) el espectro de Fourier de la luz transmitida a trav´es del objeto (At(x, y)), y
por Fl(fx, fy) el de la luz incidente en la lente (Ul), y asumimos que la aproximaci´on
de Fresnel es v´alida para la propagaci´on del frente de onda a lo largo de la distancia
d, podemos escribir:
Fl(fx, fy) = Fo(fx, fy)e−jπλd(f
2
x+fy2) (1.10)
donde por simplificaci´on se ha omitido un t´ermino de fase.
Si, por el momento, no tenemos en cuenta las dimensiones finitas de la lente (P = 1 para cualquier valor de x e y), resulta:
Uf(u, v) = e [j2fk(u2+v2)] jλf Fl( u λf, v λf) (1.11)
o, sustituyendo la expresi´on para Fl:
Uf(u, v) = e [j2fk(1−df)(u2+v2)] jλf Fo( u λf, v λf) (1.12)
1.3. Difract´ometros 17 Finalmente, esto equivale a escribir:
Uf(u, v) = Ae [j2fk(1−df)(u2+v2)] jλf × +∞Z Z −∞ t(ξ, η)e[−j2πλf(ξu+ηv)]dξdη (1.13)
As´ı, la amplitud y la fase de la luz en un punto de coordenadas (u, v) se encuentran relacionadas con la amplitud y la fase del espectro de entrada correspondiente a las frecuencias ( u
λf, v
λf). La integral se encuentra multiplicada por un t´ermino de fase
cuadr´atico que se anula en el caso en que d = f , es decir, cuando el objeto se encuentra situado en el plano focal objeto de la lente. En este caso, el resultado que se obtiene es exactamente la transformada de Fourier del objeto.
1.3.2. Objeto posterior a la lente
Consideremos ahora el caso en el que el objeto se encuentra situado en una posici´on posterior a la lente, tal y como se muestra en la figura 1.1(c). El objeto, situado a una distancia d del plano focal imagen de la lente, se puede considerar, al igual que en el caso anterior, como una funci´on t(x, y). La lente, a su vez, es iluminada perpen-dicularmente de manera uniforme por una onda plana monocrom´atica de amplitud A. Por lo tanto, la onda incidente en el objeto ser´a una onda esf´erica convergente con su centro en el punto donde el plano focal imagen de la lente intersecte al eje ´optico. Considerando ´optica geom´etrica, la amplitud de la onda esf´erica que incide en el ob-jeto tiene un valor de Af
d, puesto que las dimensiones geom´etricas del cono de luz se
han reducido en un factor d
f, mientras que su energ´ıa se ha conservado. La regi´on del
objeto que es iluminada viene determinada por la intersecci´on de dicho cono de luz con el plano donde se encuentra situado el objeto. Si la lente es circular y de di´ametro
l, dicha regi´on es circular y con un di´ametro ld f .
Las dimensiones finitas del ´area iluminada pueden ser descritas utilizando una funci´on de pupila del tipo P [ξf
d, η f
d]. Trabajando en la aproximaci´on paraxial, la amplitud
de la onda transmitida por el objeto viene descrita por la expresi´on:
U0(ξ, η) = ½ Af d P µ ξf d, η f d ¶ e[−j2dk(ξ2+η2)] ¾ t(ξ, η) (1.14)
Si consideramos difracci´on de Fresnel desde el plano objeto hasta el plano focal ima-gen, el t´ermino cuadr´atico en (ξ, η) presente en la ecuaci´on 1.14 cancela exactamente
el t´ermino cuadr´atico que aparece en la integral de difracci´on de Fresnel, y por lo tanto: Uf(u, v) = Ae[j k 2d(u2+v2)] jλd f d× +∞Z Z −∞ t(ξ, η)P µ ξf d, η f d ¶ e[−j2πλd(ξu+ηv)]dξdη (1.15)
Lo cual muestra que, excepto un t´ermino de fase cuadr´atico, la distribuci´on de ampli-tud en el plano focal es la transformada de Fourier de la regi´on del objeto iluminada por el cono de luz que atraviesa la lente.
1.4.
Arquitecturas b´
asicas de correlaci´
on
1.4.1. Correlador 4f y correlador convergente
En el apartado 1.3.1 hemos visto c´omo al iluminar con ondas planas un objeto situado en el plano focal objeto de una lente convergente, se obten´ıa en el plano focal imagen la transformada de Fourier exacta de dicho objeto. Una de las propiedades de la transformada de Fourier [Goo68] nos dice que:
TF[TF[f (x, y)]] = f (−x, −y) (1.16) y por lo tanto, acoplando en cascada dos sistemas como el anterior ser´ıa posible re-construir la imagen inicial.
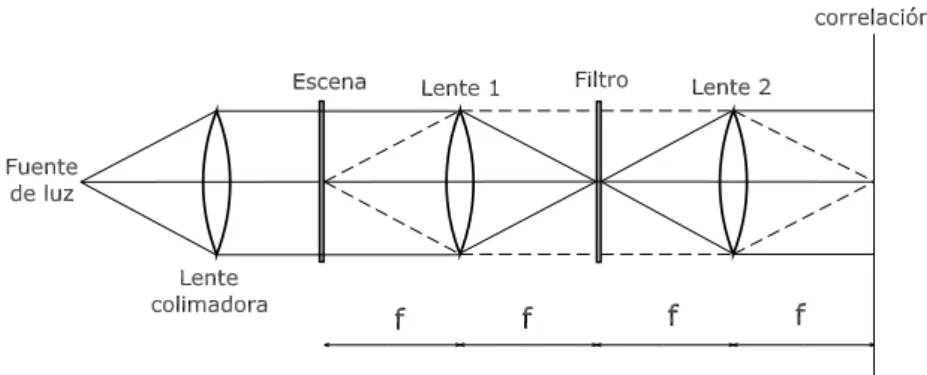
Figura 1.2: Esquema del correlador 4f.
El esquema propuesto es el que se muestra en la figura 1.2, y fue el primer montaje propuesto por VanderLugt en 1964 [Lug64]. Este esquema es el que se utiliza como
1.4. Arquitecturas b´asicas de correlaci´on 19 base para desarrollar los dispositivos de filtrado y tratamiento de im´agenes mediante m´etodos ´opticos, y debe su nombre (correlador 4f) a la distancia entre el plano de entrada, donde se coloca la escena, y el de salida, o plano de correlaci´on. Esta dis-tancia, en el caso en que trabajemos con dos sistemas ´opticos id´enticos, equivale a cuatro veces la distancia focal de las lentes.
La escena (funci´on f (x, y)) se sit´ua, como ya hemos dicho, en el plano focal objeto del primer difract´ometro, y el filtro codificado (G∗(u, v)), que ser´a el encargado de
modular la informaci´on de la transformada de la escena (ver ecuaci´on 1.2), en el plano focal imagen de la primera lente. Como se ha visto anteriormente, con esta configu-raci´on se obtiene en este plano la transformada de Fourier exacta de la escena, por lo que es aqu´ı donde se realiza el producto F (u, v)G∗(u, v). Al realizarse la segunda
transformaci´on con la segunda lente se obtiene en su plano imagen el producto de correlaci´on f ⊗ g.
A la simplicidad que presenta este dispositivo se ha de contraponer una serie de in-convenientes, la mayor´ıa de los cuales son de tipo pr´actico, ya que, por ejemplo, la longitud total del montaje es siempre de cuatro veces la focal de las lentes, supo-ni´endolas iguales. Adem´as, el acoplamiento de las escalas de la primera transformada y el filtro utilizado para modificar la informaci´on resulta un problema nada trivial. Finalmente, y tal vez la dificultad m´as importante que plantea este montaje, encon-tramos la imposibilidad de modificar la escala de la transformada de Fourier de la escena, puesto que ´esta viene determinada por la distancia entre ella y la lente 1, que necesariamente ha de coincidir con la distancia focal del sistema ´optico. Puesto que esta escala debe coincidir con la escala del filtro, el no poder modificarla sin reem-plazar el sistema ´optico reduce considerablemente la versatilidad del dispositivo. Para solventar este conjunto de dificultades se puede trabajar con un procesador alter-nativo, el denominado correlador convergente. Dicho dispositivo es el que se muestra en la figura 1.3 y se trata tambi´en de un sistema ´optico con dos lentes convergentes de focales f0
1 y f20, pero que en este caso no se encuentran acopladas por su focal.
El objeto se encuentra situado despu´es de la primera lente, y su transformada de Fourier se forma en el plano imagen de la fuente de luz a trav´es de la primera lente. Es en este mismo plano donde se coloca el filtro. Finalmente, la imagen procesada es obtenida en el plano imagen del objeto a trav´es de la segunda lente.
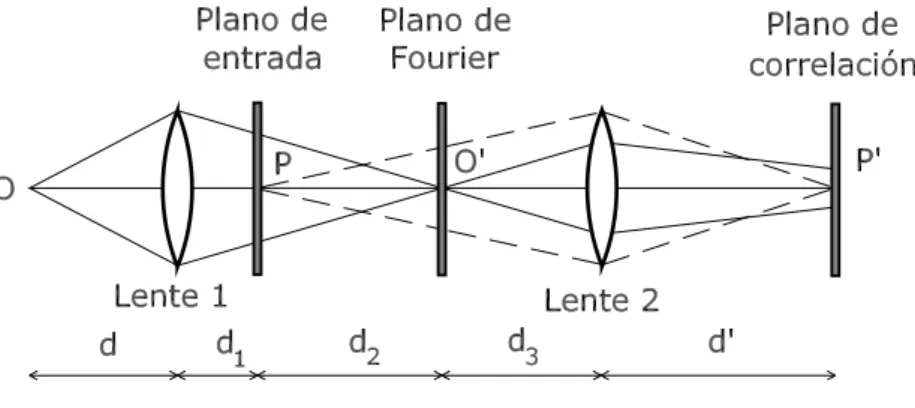
Figura 1.3: Esquema del correlador convergente de Vander Lugt.
Para que el sistema funcione de forma adecuada es necesario, a su vez, que las dis-tancias entre los diferentes planos se encuentren relacionadas seg´un:
1 d1+ d2 − 1 d = 1 f0 1 − 1 d2+ d3 + 1 d0 = 1 f0 2 (1.17)
El comportamiento de este correlador se puede describir de manera intuitiva del si-guiente modo: el objeto, iluminado por la onda convergente proveniente de la lente 1, forma su imagen a trav´es de la lente 2. En el plano de Fourier obtenemos la figura de difracci´on del objeto, que incluye su transformada de Fourier, y es donde se coloca la informaci´on del filtro. Por lo tanto, en el plano de correlaci´on se formar´a la imagen del objeto modificada por dicho filtro.
Este procesador presenta una ventaja importante respecto del correlador 4f, y es que la posici´on del plano de entrada puede desplazarse, y puesto que la transformada del objeto tiene un factor de escala λd2, se puede encontrar una distancia d2que se ajuste
a la escala para la cual se ha calculado el filtro. Evidentemente, la modificaci´on de la distancia d2 implica tambi´en la variaci´on de la posici´on del plano de correlaci´on, de
1.4. Arquitecturas b´asicas de correlaci´on 21
1.4.2. Generaci´on de filtros
Hemos visto anteriormente que para obtener la correlaci´on cruzada entre la imagen
f (x, y) y la referencia a detectar g(x, y) utilizando un correlador 4f se ha de dise˜nar el filtro G∗(u, v). As´ı, en el plano de Fourier de la primera lente se obtiene el producto
F (u, v)G∗(u, v) y en el plano imagen de la segunda lente el t´ermino f ⊗ g. Ahora
bien, en general, la funci´on G∗(u, v) es una funci´on compleja, y su codificaci´on
re-quiere m´etodos especiales, bien de holograf´ıa ´optica o de holograf´ıa digital.
La holograf´ıa ´optica fue introducida por Gabor en 1949 [Gab49] como un m´etodo pa-ra “registpa-rar y reconstruir frentes de onda”. Dicho m´etodo consist´ıa en iluminar un objeto con un haz de luz monocrom´atico y coherente, denominado haz de referencia, y registrar en un soporte adecuado las interferencias entre dicho haz de referencia y el proveniente directamente de la misma fuente de luz.
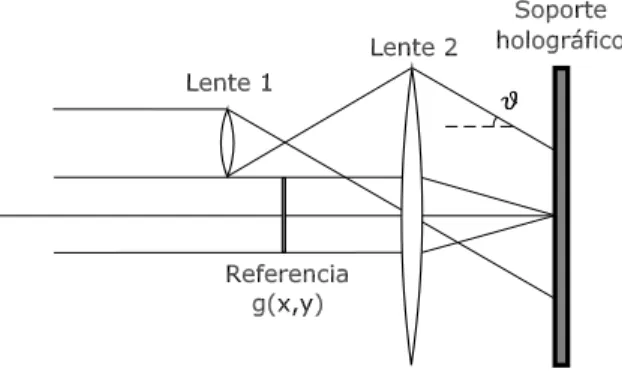
Actualmente las t´ecnicas de holograf´ıa digital generada por ordenador permiten codi-ficar funciones complejas, pero fue VanderLugt [Lug64] en 1964 el primero en describir un experimento de correlaci´on utilizando t´ecnicas ´opticas de holograf´ıa para codifi-car el filtro. Para ello, se necesita generar previamente mediante un difract´ometro, tal y como se muestra en la figura 1.4, la transformada de Fourier (G(u, v)) de la imagen de referencia (g(x, y)) : en el plano objeto de la lente se coloca dicha imagen de referencia, de modo que en el plano focal imagen se obtiene la transformada de Fourier exacta. En dicho plano se coloca un registro fotogr´afico que ser´a el encargado de registrar las interferencias entre la funci´on G(u, v) y una onda plana de amplitud
A que incide seg´un una direcci´on de propagaci´on que forma un ´angulo θ con el eje ´optico.
Por lo tanto, el registro de la placa es:
I(u, v) = ¯¯G(u0, v0) + Ae(−j2παv)¯¯2
= |G(u0, v0)|2+ A2+ AG(u0, v0)e(j2παv)+ AG∗(u0, v0)e(−j2παv) (1.18)
donde se ha definido α = sin θλ .
Una vez realizado el proceso de revelado de la placa fotogr´afica, se sit´ua ´esta en el plano de Fourier de un procesador 4f en cuyo plano objeto se encuentra la imagen
f (x, y). Para que las escalas de las transformadas de Fourier ´opticas coincidan es
necesario que la focal de la lente con la que se ha generado el filtro y la focal del primer difract´ometro del correlador 4f coincidan.
Finalmente, en el plano focal imagen del segundo difract´ometro se obtiene:
U (u, v) = F (u, v) h |G(u, v)|2+ A2i + Ae(j2παv)F (u, v)G(u, v) + Ae(−j2παv)F (u, v)G∗(u, v) (1.19)
Los tres t´erminos anteriores se pueden interpretar como:
1. El primer t´ermino, o t´ermino centrado, no aporta informaci´on relevante y se difracta en la direcci´on del eje ´optico.
2. El segundo t´ermino corresponde al producto de convoluci´on de las funciones f y g, y al encontrarse modulado por una onda plana dirigida seg´un la direcci´on positiva del eje v, se encontrar´a situado en uno de los laterales del t´ermino central
3. El tercer t´ermino incluye la correlaci´on entre la funciones f y g, y se encuentra situado de forma sim´etrica al t´ermino de convoluci´on respecto del eje ´optico.
1.4.3. Correlador de transformadas conjuntas
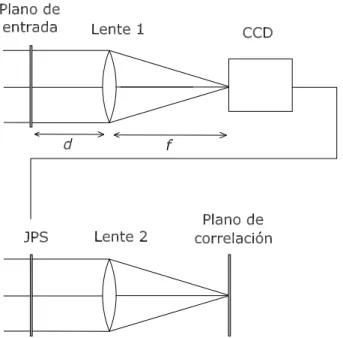
Una arquitectura alternativa al correlador de VanderLugt es el denominado correla-dor de transformadas conjuntas o JTC. La caracter´ıstica principal de este dispositivo la determina el hecho de que no sea necesario dise˜nar ning´un filtro en el espacio de Fourier, tal y como pasaba en el caso anterior, puesto que la introducci´on de la escena y el objeto a detectar se realiza en el mismo plano de entrada.
1.4. Arquitecturas b´asicas de correlaci´on 23 Por otra parte, este correlador no puede trabajar en tiempo real, ya que se hace necesario registrar la intensidad del plano de Fourier en un soporte f´ısico. De todos modos, gracias a la evoluci´on de la tecnolog´ıa de los dispositivos de cristal l´ıquido (´o LCD1) y su uso conjunto con c´amaras de v´ıdeo (´o CCD2), esta dificultad ya no
representa un verdadero problema.
Figura 1.5: Esquema del correlador de transformadas conjuntas convencional. Simplificando el proceso, se podr´ıa decir que en un primer paso se registra la dis-tribuci´on de intensidad producida por la transformada de Fourier ´optica del plano de entrada o JPS. Esta distribuci´on es nuevamente transformada ´opticamente en un segundo paso, y de este modo se obtiene la correlaci´on entre el motivo y la escena. As´ı, el procesador (figura 1.5) consiste en un sistema difractor en el que un haz de ondas planas de longitud de onda λ ilumina conjuntamente la escena f (x, y) y la referencia g(x, y), las cuales se encuentran situadas en el mismo plano, separadas una distancia 2a. Este plano se encuentra situado a una distancia arbitraria d de una lente de focal f , en cuyo plano focal se registra de forma simult´anea la informaci´on proveniente tanto de la escena como de la referencia.
1Liquid Crystal Devices 2Charged-Coupled Device
Esta distribuci´on se reintroduce en el plano de entrada, de manera que al iluminar de nuevo el sistema, en el plano focal de la lente se obtiene la siguiente distribuci´on:
U (x, y) = f (−x, −y) ⊗ f (−x, −y) + g(−x, −y) ⊗ g(−x, −y)
+ f (−x, −y) ⊗ g(−x, −y) ∗ δ(x − 2a, y) + g(−x, −y) ⊗ f (−x, −y) ∗ δ(x + 2a, y)
(1.20)
Analizando el resultado, se observa c´omo se obtienen los t´erminos de autocorrelaci´on de escena y referencia centrados y, de forma sim´etrica y centrados en los puntos de coordenadas (±2a, 0), los dos t´erminos de correlaci´on cruzada entre escena y referen-cia.
Cap´ıtulo 2
Aberraciones geom´
etricas en
sistemas ´
opticos
Conocidas las caracter´ısticas geom´etricas (radios de curvatura y espesores) y ´opticas (´ındice de refracci´on) de las lentes que forman un sistema ´optico es posible deter-minar la posici´on y tama˜no de la imagen de un objeto concreto [Hec00]. Incluso es posible calcular tambi´en la distribuci´on de intensidad de la imagen si, adem´as, tanto la posici´on como el tama˜no de las pupilas de salida y de entrada son valores conocidos. En el caso de que los sistemas ´opticos utilizados presenten simetr´ıa de revoluci´on y se cumplan las condiciones de ´optica paraxial, es posible obtener una representaci´on ´optica perfecta entre pares de puntos. Ahora bien, estas condiciones de trabajo son especialmente restrictivas en lo que respecta a los valores de abertura y campo, de modo que resulta complicado ce˜nirse a ellas. Esto hace que en el caso m´as general, esta correspondencia exacta entre objeto e imagen se pierda, y las im´agenes empie-cen a presentar ”defectos”: as´ı, los planos imagen se curvan, las im´agenes se vuelven menos n´ıtidas, la semejanza total entre objeto e imagen desaparece ... Este conjunto de alteraciones que sufre la imagen son debidas principalmente a las caracter´ısticas f´ısicas del sistema ´optico y a sus condiciones de trabajo, y reciben el nombre de abe-rraciones geom´etricas.
Como idea previa, se podr´ıa definir la aberraci´on de un sistema para un determinado objeto puntual como la desviaci´on que experimenta el frente de onda en la pupila de salida respecto del frente de onda ideal. En el caso de aberraci´on nula, este frente de onda ideal es esf´erico, de modo que todos los rayos provenientes del punto objeto
convergen en el punto imagen, y el resultado es una imagen puntual. En general, al trabajar con sistemas reales, dicha onda convergente ser´a s´olo aproximadamente esf´erica, y por lo tanto esta correspondencia entre puntos no se conserva. Se puede considerar, por lo tanto, que la calidad de la imagen vendr´a determinada por las aberraciones del sistema ´optico.
2.1.
Aberraciones de rayo y onda
La ´optica geom´etrica basa su estudio de la propagaci´on de la luz en dos concep-tos fundamentales: el de rayo luminoso para caracterizar a la luz, y el de ´ındice de refracci´on para definir los medios materiales a trav´es de los cuales se realiza dicha propagaci´on. Ambos conceptos se complementan con tres leyes, las cuales rigen la propagaci´on de los rayos en los medios: propagaci´on rectil´ınea, refracci´on y reflexi´on. Estas tres leyes no son m´as que consecuencias del principio de Fermat [Hec00]. Si un rayo de luz recorre un trayecto de longitud s en un medio homog´eneo de ´ındice de refracci´on n, se define el camino ´optico < L > de dicho rayo como el producto del ´ındice de refracci´on del medio y la longitud recorrida:
< L >= n · s (2.1)
Si en su trayectoria atraviesa diferentes medios de ´ındice de refracci´on ni, y recorre
en cada uno de ellos un trayecto de longitud si, el camino ´optico total ser´a:
< L >= n1· s1+ n2· s2+ ... =
X
i
ni· si (2.2)
De todos los rayos trazados desde el punto objeto, se denomina rayo principal a aquel rayo que atraviesa el centro del diafragma de apertura y pasa, real o virtual-mente, por los centros de la pupila de entrada y de la pupila de salida. Si cada uno de los rayos provenientes del objeto es trazado de modo que recorran el mismo camino ´optico que el recorrido por el rayo principal, el extremo de cada uno de dichos rayos forma una superficie que recibe el nombre de frente de onda del sistema ´optico. Si tras atravesar el sistema ´optico dicha superficie es esf´erica con su centro de curvatu-ra en la posici´on de la imagen pacurvatu-raxial del punto objeto, la imagen ser´a perfecta. As´ı, los rayos trazados a trav´es del sistema al propagarse desde el punto objeto P hasta el
2.1. Aberraciones de rayo y onda 27 punto imagen P0 recorren el mismo camino ´optico, y todos ellos pasan por P0. Ahora
bien, si el frente de onda se desv´ıa respecto del frente de ondas esf´erico, tambi´en denominado esfera de referencia, diremos entonces que la imagen est´a aberrada. En esta situaci´on, los rayos no recorren el mismo camino ´optico, y su intersecci´on con el plano imagen paraxial ya no es el punto P0, sino puntos m´as o menos cercanos a
´el. La distancia entre dichos puntos y la posici´on de la imagen paraxial se denomina aberraci´on del rayo.
Por otro lado, se define [Mah98] la aberraci´on de onda correspondiente a un ra-yo determinado en el punto Q, donde intersecta a la esfera de referencia, como la diferencia de caminos ´opticos recorridos por el rayo considerado y el rayo principal al desplazarse ambos desde el punto objeto hasta la intersecci´on con dicha esfera de referencia.
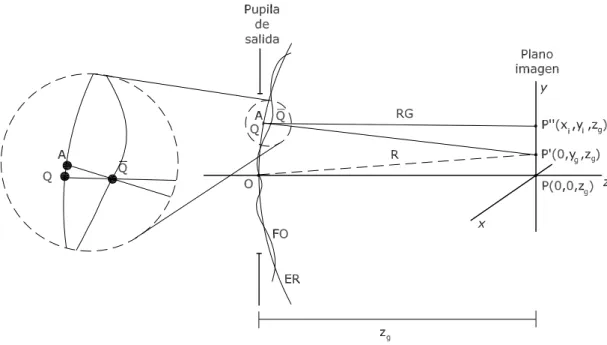
Figura 2.1: Frente de onda aberrado para un objeto puntual situado sobre el eje ´optico.
La figura 2.1 muestra el esquema anterior para el caso de un objeto puntual situado sobre el eje ´optico: un rayo arbitrario RG intersecta a la esfera de referencia ER y al frente de onda aberrado F O en los puntos Q y Q, respectivamente, y al plano imagen gaussiano en el punto P00. En esta figura se aprecia c´omo la esfera de referencia, de
radio de curvatura R, se encuentra centrada en el punto imagen gaussiano, P0, y
c´omo tanto el frente de onda aberrado como la esfera de referencia pasan ambos por el centro O de la pupila de salida.
En base a la definici´on anterior de frente de onda, la longitud del camino ´optico del rayo emergente del punto objeto y con final en Q es la misma que la del rayo principal con final en el punto O (centro de la pupila de salida). De este modo, el producto
nQQ proporciona la aberraci´on de onda del rayo considerado, W .
Ahora bien, existe una definici´on alternativa [Ray64] para la aberraci´on de onda. En este caso, la aberraci´on de onda se define para un punto Q del frente de onda, en vez de para un punto Q de la esfera de referencia. Seg´un esta definici´on, la aberraci´on se define como la distancia entre Q y la esfera de referencia medida a lo largo del radio de la esfera que pasa por el punto Q (AQP0). ´Esta ser´a la definici´on que utilizaremos en el siguiente apartado para establecer una relaci´on entre la aberraci´on de rayo y la aberraci´on de onda.
2.1.1. Relaci´on entre aberraci´on de rayo y aberraci´on de onda
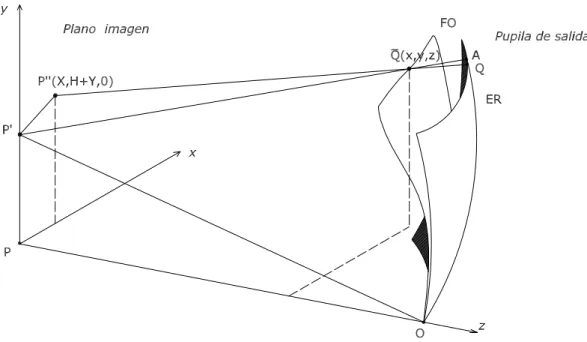
La figura 2.2 muestra de forma m´as simple el esquema de la figura 2.1. As´ı, F O representa parte de un frente de onda aberrado (propag´andose hacia la izquierda) en la pupila de salida del sistema, mientras que ER representa parte de la esfera de referencia. Ambos presentan un punto en com´un en el centro de la pupila de salida
O. El centro P0 de la esfera de referencia coincide con el punto imagen gausiano,
de modo que el radio de la esfera de referencia es R = OP0 = AP0. El sistema de
coordenadas est´a elegido de tal manera que el eje z coincide con el eje ´optico, el plano
xy es el plano imagen y H = P P0 es la altura de la imagen.
Un rayo cualquiera perpendicular al frente de onda en un punto Q de coordenadas (x, y, z) intersecta al plano imagen en el punto P00, de modo que P0P00es la aberraci´on
de rayo, y (X, Y ) sus coordenadas ortogonales sobre el plano imagen. La distancia desde el centro de la esfera hasta este punto en el frente de onda es r = P0Q, y puesto
que hemos definido la aberraci´on de onda como la distancia desde ese punto hasta la esfera de referencia, podemos escribir:
W (x, y) = R − r = AP0− P0Q (2.3)
2.1. Aberraciones de rayo y onda 29
Figura 2.2: Esfera de referencia (ER) y frente de onda (FO).
ecuaci´on del frente de onda en el sistema de coordenadas P xyr, y por lo tanto, obtener la relaci´on entre la aberraci´on de onda y la de rayo se reduce a un problema de derivadas parciales y cambio de variables. Las variables x, y, z, r se encuentran relacionadas seg´un la expresi´on pitag´orica:
x2+ (y − H)2+ z2= r2 (2.4) que tambi´en se puede expresar como:
G(x, y, z, r) = 0 (2.5)
El frente de onda se puede definir a partir de las expresiones:
F (x, y, z) = 0 , z = f (x, y) (2.6)
Si eliminamos la variable z de las ecuaciones 2.4 y 2.6, podemos obtener una nueva expresi´on para el frente de onda:
r = g(x, y) (2.7)
Los diferenciales de las funciones f y g ser´an, por tanto:
dz = ∂z ∂xdx + ∂z ∂ydy dr = ∂r ∂xdx + ∂r ∂ydy (2.8)
Y de manera similar, para las funciones F y G: ∂F ∂xdx + ∂F ∂ydy + ∂F ∂zdz = 0 ∂G ∂xdx + ∂G ∂ydy + ∂G ∂zdz + ∂G ∂rdr = 0 (2.9)
Sustituimos en la ecuaci´on anterior las expresiones para dz y dr, y despu´es de agrupar t´erminos: µ ∂F ∂x + ∂F ∂z ∂z ∂x ¶ dx + µ ∂F ∂y + ∂F ∂z ∂z ∂y ¶ dy = 0 µ ∂G ∂x + ∂G ∂z ∂z ∂x+ ∂G ∂r ∂r ∂x ¶ dx + µ ∂G ∂y + ∂G ∂z ∂z ∂y + ∂G ∂r ∂r ∂y ¶ dy = 0 (2.10)
Puesto que dx y dy son infinit´esimos independientes, los coeficientes que les acom-pa˜nan han de ser nulos, y por lo tanto:
∂F ∂x + ∂F ∂z ∂z ∂x = 0 ∂F ∂y + ∂F ∂z ∂z ∂y = 0 ∂G ∂x + ∂G ∂z ∂z ∂x + ∂G ∂r ∂r ∂x = 0 ∂G ∂y + ∂G ∂z ∂z ∂y+ ∂G ∂r ∂r ∂y = 0 (2.11)
La soluci´on del sistema nos lleva a:
∂r ∂x = 1 ∂G ∂r à ∂G ∂z ∂F ∂x ∂F ∂z − ∂G ∂x ! ∂r ∂y = 1 ∂G ∂r à ∂G ∂z ∂F ∂y ∂F ∂z − ∂G ∂y ! (2.12)
Ahora bien, de la ecuaci´on 2.4 tenemos que:
∂G ∂x = 2x, ∂G ∂y = 2(y − H), ∂G ∂z = 2z, ∂G ∂r = −2r (2.13)
Por otro lado, las derivadas parciales de F y los cosenos directores de la direcci´on perpendicular en Q (es decir, del rayo) se encuentran relacionados seg´un la expresi´on:
∂F ∂x :
∂F ∂y :
∂F
2.2. Funci´on de aberraci´on de un sistema con simetr´ıa de revoluci´on 31 Y a partir de la geometr´ıa de la figura 2.2:
cos α cos γ = x − X z , cos β cos γ = y − (H + Y ) z (2.15)
Por lo tanto, sustituyendo estos valores en las ecuaciones 2.12, obtenemos:
∂r ∂x = X r , ∂r ∂y = Y r (2.16)
Si recordamos la definici´on de aberraci´on de onda (ecuaci´on 2.3), r = R − W , y por lo tanto: ∂r ∂x = − ∂W ∂x , ∂r ∂y = − ∂W y (2.17)
Por lo que finalmente llegamos a las relaciones exactas entre la aberraci´on de onda y la aberraci´on de rayo: ∂W ∂x = − X R − W, ∂W ∂y = − Y R − W (2.18)
2.2.
Funci´
on de aberraci´
on de un sistema con simetr´ıa
de revoluci´
on
Una vez definidos formalmente los conceptos de aberraci´on de rayo y de onda, as´ı como la relaci´on entre ambos, pasaremos a analizar las aberraciones de un sis-tema ´optico con simetr´ıa de revoluci´on. Para ello, el primer paso ser´a determinar la expresi´on anal´ıtica de la aberraci´on de onda, ya sea como un desarrollo de potencias en funci´on de coordenadas cartesianas, o bien mediante coordenadas polares.
Mediante la introducci´on de la funci´on caracter´ıstica de Hamilton, se puede demos-trar [BW99] que la aberraci´on de onda depende ´unicamente de cuatro variables: las coordenadas del rayo en el punto objeto (x0, y0) y sus coordenadas en la intersecci´on
en la pupila de salida (x, y). De este modo, la funci´on de aberraci´on del sistema para el punto objecto considerado, W (~r0), se puede escribir en su forma m´as general como
una serie de potencias en t´erminos de las coordenadas de los dos puntos anteriores, el punto objeto y el situado en la pupila, seg´un la expresi´on:
W (x0, y0; x, y) = ∞ X j=0 xj0 ∞ X k=0 y0k ∞ X l=0 xl ∞ X m=0 ymajklm (2.19)
donde el t´ermino ajklmrepresenta los coeficientes de la expansi´on, los cuales dependen
los ´ındices de refracci´on de los medios y el grosor de los mismos, y todas las potencias presentan exponentes enteros no negativos.
Ahora bien, si tenemos en cuenta la simetr´ıa del sistema, esta dependencia se reduce ´
unicamente a tres combinaciones: x2
0+ y02, x2+ y2 y x0x + y0y. Para comprobar
esto resulta m´as adecuado trabajar en coordenadas polares. Sean (r0, θ0) y (r, θ)
las coordenadas polares correspondientes a las coordenadas rectangulares (x0, y0) y
(x, y), respectivamente, del punto objeto y del situado en el plano de la pupila. Las relaciones entre ambos sistemas de coordenadas ser´an:
(
(x0, y0) = r0(cos θ0, sin θ0)
(x, y) = r(cos θ, sin θ) (2.20) De este modo, la aberraci´on depende ahora de r0, r, θ y θ0, o lo que es lo mismo,
r0, r, θ0 − θ y θ. Ahora bien, si rotamos ambos sistemas de referencia un mismo
´angulo, las tres primeras variables permanecer´an inalteradas, pero no as´ı el valor de
θ. Esto entrar´ıa en contradicci´on con el hecho de que W sea invariante a rotaciones,
lo que significa que la aberraci´on no puede depender del valor de θ, y por lo tanto, tan s´olo es funci´on de r0, r, θ0− θ. Esto quiere decir que la funci´on de aberraci´on se
puede expresar en funci´on de los tres productos escalares de los vectores ~r0(x0, y0)
y ~r(x, y), que constituyen los denominados invariantes rotacionales de la funci´on de aberraci´on: |~r0|2 = r02= p x2 0+ y02 |~r|2 = r2 =px2+ y2 ~r0· ~r = r0r cos(θ − θ0) = x0x + y0y (2.21) Por lo tanto, si W se expresa mediante un desarrollo en serie de potencias de las cuatro coordenadas, la expansi´on ´unicamente contendr´a t´erminos de grado par, de manera que ser´a del tipo [BW99]:
W = c(x20+ y02) + W(4)+ W(6)+ · · · (2.22) donde c es una constante y W(2k) representa un polinomio de grado 2k en las
coorde-nadas, y contiene estas coordenadas ´unicamente en potencias de los tres invariantes. Las aberraciones de orden m´as bajo, representadas por el polinomio W(4)son
denomi-nadas generalmente aberraciones primarias o aberraciones de Seidel. Este polinomio incluye cinco t´erminos, el coeficiente de cada uno de los cuales corresponde a la dis-torsi´on, la curvatura de campo, el astigmatismo, el coma y la aberraci´on esf´erica.
2.2. Funci´on de aberraci´on de un sistema con simetr´ıa de revoluci´on 33
2.2.1. Polinomios y coeficientes de Zernike
Ya hemos visto en el apartado anterior como para un objeto determinado, la funci´on de aberraci´on W (ρ, θ) de un sistema ´optico sim´etrico respecto de la rotaci´on alrededor del eje ´optico puede ser expresada en funci´on de un conjunto completo1 de
polino-mios. Existen muchos conjuntos de polinomios con estas caracter´ısticas, pero uno de ellos, introducido por primera vez por F. Zernike [Zer34], resulta especialmente ´util. Los polinomios de Zernike presentan una serie de caracter´ısticas singulares, puesto que son los ´unicos que, expresados en dos variables, ρ y θ, son ortogonales en el c´ırcu-lo unidad. Esta ortogonalidad provoca que el hecho de a˜nadir o suprimir cualquier t´ermino del desarrollo no modifica el ajuste ´optimo de la expresi´on anal´ıtica de la aberraci´on con respecto del polinomio real de aberraci´on. Por otra parte, incluyen un polinomio para cada valor permitido de m y n, los cuales representan la dependencia el grado del polinomio radial y el ´ındice de la dependencia angular, respectivamente. Finalmente, son invariantes respecto a rotaciones de los ejes alrededor del origen. En general, y como ser´ıa de esperar, los polinomios de Zernike circulares son adecuados para representar la funci´on de aberraci´on de sistemas ´opticos con simetr´ıa circular. Estos polinomios Rmn(ρ) cos mθ, expresados en coordenadas polares (ρ, θ), permiten escribir la funci´on de aberraci´on W (ρ, θ) como:
W (ρ, θ) = ∞ X n=0 n X m=0 cnm s 2(n + 1) 1 + δm0R m n(ρ) cos mθ (2.23)
donde cnm son los coeficientes de la expansi´on, n y m son enteros positivos (incluido
el cero), de manera que n − m ≥ 0 y par, δij es una delta de Kronecker y
Rmn(ρ) = n−m 2 X s=0 (−1)s(n − s)! s! µ n + m s − s ¶ ! µ n − m s − s ¶ ! ρn−2s (2.24)
es un polinomio de grado n en ρ con t´erminos en ρn, ρn−2, ... ,ρm. El hecho de que
no aparezcan t´erminos dependientes de sin mθ es debido a que todos sus coeficientes son nulos debido a la simetr´ıa de rotaci´on del sistema ´optico alrededor del eje.
1El t´ermino completo indica que cualquier funci´on continua puede ser expresada como una
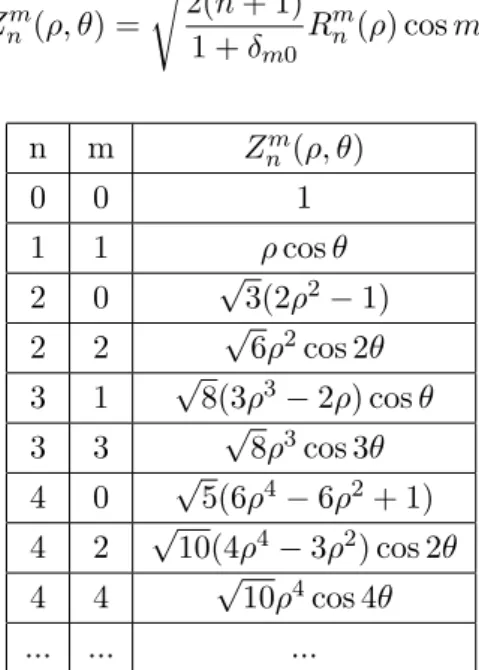
Debido a su ortogonalidad, generalmente los diferentes t´erminos del desarrollo de la aberraci´on en funci´on de los polinomios de Zernike suelen denominarse de forma gen´erica como aberraciones ortogonales. Algunos de los t´erminos de las aberra-ciones ortonormales de Zernike se muestran en la tabla 2.1. En esta tabla se define Zm n (ρ, θ) como: Znm(ρ, θ) = s 2(n + 1) 1 + δm0 Rmn(ρ) cos mθ (2.25) n m Zm n(ρ, θ) 0 0 1 1 1 ρ cos θ 2 0 √3(2ρ2− 1) 2 2 √6ρ2cos 2θ 3 1 √8(3ρ3− 2ρ) cos θ 3 3 √8ρ3cos 3θ 4 0 √5(6ρ4− 6ρ2+ 1) 4 2 √10(4ρ4− 3ρ2) cos 2θ 4 4 √10ρ4cos 4θ ... ... ...
Tabla 2.1: Aberraciones ortonormales de Zernike (n ≤ 4).
2.3.
Propagaci´
on de im´
agenes aberradas
En los apartados anteriores se han analizado tanto la definici´on como la expresi´on anal´ıtica de la aberraci´on de onda asociada a un sistema ´optico para un punto objeto situado en el eje ´optico. Para ello, se ha utilizado la ´optica geom´etrica, a partir del estudio de la marcha de los rayos provenientes del objeto hasta el plano imagen, y relacionando la aberraci´on de rayo en el plano imagen con la aberraci´on de onda en el plano de la pupila de salida. Hasta este momento no se han considerado los efec-tos difractivos asociados a los diferentes elemenefec-tos que conforman el sistema ´optico. Ser´a en este apartado donde se tendr´an en cuenta estos efectos, agrup´andolos de for-ma global en la pupila de salida, y de este modo se calcular´a la distribuci´on de luz en ella para un sistema aberrado, y posteriormente se realizar´a su propagaci´on hasta un plano arbitrario.
2.3. Propagaci´on de im´agenes aberradas 35 El primero en asociar estos efectos a la pupila de salida fue Lord Rayleigh en 1896 [Ray96], aunque ya anteriormente Ernst Abbe en 1873 [Abb73] los hab´ıa agrupado en la pupila de entrada. Ambos m´etodos son equivalentes, puesto que ambas pupilas son im´agenes una de la otra, y utilizan la ´optica geom´etrica para describir la propagaci´on de la luz entre la pupila de entrada y la de salida del sistema, mientras que los efectos difractivos ´unicamente se consideran durante la propagaci´on desde el objeto hasta la pupila de entrada o, de forma alternativa, desde la pupila de salida hasta el plano imagen. El desarrollo que se presenta en este apartado sigue fundamentalmente la notaci´on y el esquema que se puede hallar en [Mah01].
2.3.1. Distribuci´on de luz en la pupila de salida
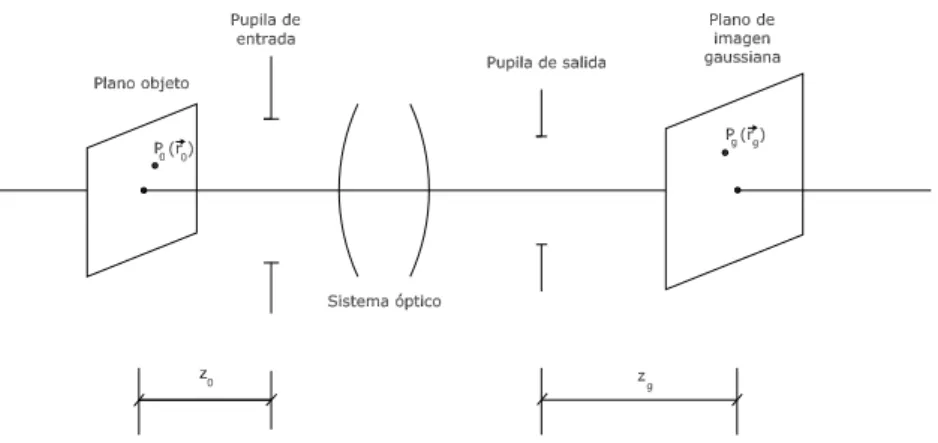
Consideremos un objeto puntual situado en la posici´on ( ~r0; z0), tal y como se mues-tra en la figura 2.3. Una onda esf´erica divergente, con su centro de curvatura en el objeto, incide en la pupila de entrada. Si el sistema no tiene aberraci´on, una onda esf´erica de la forma e(−ikrR ), donde R es su radio de curvatura, emerge de la pupila
de salida convergiendo a la imagen gaussiana (o paraxial) del objeto, situada en la posici´on ( ~rg; zg). En el caso real de que el sistema ´optico presente aberraciones, este frente de onda emergente ya no ser´a esf´erico, sino que se distorsionar´a, tal y como se ha comentado anteriormente.
Figura 2.3: Esquema de formaci´on de la imagen gaussiana para un objeto puntual. Fijemos nuestra atenci´on en uno de los m´ultiples rayos que, provenientes del objeto, atraviesan el sistema ´optico, y sea W ( ~rp; ~r0) la aberraci´on de onda de un rayo que pasa por el plano de la pupila de salida por un punto Pp cuya posici´on viene
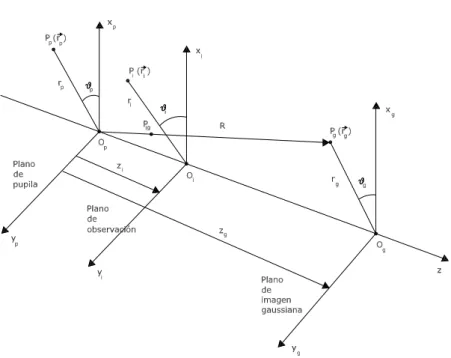
Figura 2.4: Sistema de coordenadas en la pupila de salida, en el plano de imagen gaussiana y en un plano imagen cualquiera.
La amplitud compleja en Pp debida a un elemento ∆ ~r0 centrado en ~r0 se puede escribir como:
∆Uex( ~rp; ~r0) = P ( ~rp; ~r0)e(−iks) (2.26)
donde s representa la distancia entre el punto considerado y el punto correspondiente en el plano imagen gausiano, Pg, es decir:
s =
q
z2
g+ |~rp− ~rg|2 (2.27)
mientras que P (~rp; ~r0), definida como:
P (~rp; ~r0) = A(~rp; ~r0)e[ikW (~rp;~r0)] , en el interior de la pupila de salida
= 0 , en el exterior de la pupila de salida (2.28) recibe el nombre de funci´on de pupila del sistema. La funci´on de amplitud A(~rp; ~r0),
denominada funci´on de apodizaci´on, representa la variaci´on de amplitud de la on-da a lo largo de la pupila de salion-da.
2.3. Propagaci´on de im´agenes aberradas 37 La intensidad en el punto Pp del plano de la pupila de salida debida al elemento ∆ ~r0
considerado viene determinada por:
Ip(~rp; ~r0) = |∆Uex(~rp; ~r0)|2 = |P (~rp; ~r0)|2 = A2(~rp; ~r0) (2.29) y la potencia correspondiente en la pupila de salida se obtiene integrando la intensidad para toda la pupila:
Pex(~r0) =
Z
|P (~rp; ~r0)|2d~rp =
Z
A2(~rp; ~r0)d~rp (2.30)
2.3.2. Distribuci´on de luz en un plano arbitrario
Consideremos ahora la propagaci´on de una onda desde el plano de la pupila de salida hasta un plano de observaci´on situado a una distancia arbitraria zi. Para ello
utili-zaremos la f´ormula de Rayleigh - Sommerfeld [BW99] para describir la propagaci´on de una onda desde un plano z = 0 hasta un plano cualquiera situado a distancia z, tal y como se muestra en la figura 2.5.
Figura 2.5: Propagaci´on de una onda. C´alculo de la amplitud compleja en el plano z a partir de la amplitud compleja en el plano z = 0.
Esta relaci´on se puede expresar como:
U (~r; z) = 1 λ Z U (~r0; 0) µ 1 kl − i ¶ z l eikl l d~r0 (2.31)
donde l representa la distancia P0P entre el punto origen (~r0; 0) y el punto de
obser-vaci´on (~r; z), es decir:
l =
q
Para valores grandes de z, kl >> 1, y l ≈ z, y por lo tanto, podemos realizar las siguientes aproximaciones:
1. despreciar el valor de kl1 frente a la unidad, 2. considerar el valor de z
l equivalente a la unidad,
3. sustituir l por z (excepto en el exponente, donde se encuentra multiplicado por
k) para valores de z mucho mayores que el tama˜no de la pupila de salida. Si ahora sustituimos la ecuaci´on 2.26 en la expresi´on 2.31, podemos escribir la am-plitud compleja en el plano zi como:
∆Ui(~ri; ~r0; zi) = −λz1 i
Z
P (~rp; ~r0)e[ik(l−s)]d~rp (2.33)
donde l corresponde a la distancia desde el punto de observaci´o Pi hasta el punto Pp
situado en la pupila de salida:
l =
q
zi2+ |~rp− ~ri|2 (2.34)
Si ahora desarrollamos el t´ermino l − s obtenemos:
l − s = (zi− zg) +12 µ r2 i zi − r2 g zg ¶ − 1 zi~rp· µ ~ri−zzi g ~rg ¶ +1 2 µ 1 zi − 1 zg ¶ rp2 −1 8 µ r4 i z3 i − r 4 g z3 g ¶ − 1 8 µ 1 z3 i − 1 z3 g ¶ rp4 +1 2r 3 p µ ri z3 i cos θpi− rg z3 g cos θpg ¶ −1 2r 2 p µ r2 i z3 i cos θ2pi−r 2 g z3 g cos θpg2 ¶ −1 4r 2 p µ r2 i z3 i − r 2 g z3 g ¶ + 1 2rp µ r3 i z3 i cos θpi− r3 g z3 g cos θpg ¶ + · · · (2.35)
Cada uno de los t´erminos presentes en el desarrollo depende de las posiciones del plano imagen gaussiano zg y del plano de observaci´on zi, y equivale a un t´ermino
de fase al multiplicarse por k, aunque no todos ellos representan aberraciones en el sentido cl´asico de la acepci´on. Es interesante destacar el t´ermino
Wd(~rp; ~ri; ~rg) = l − s + z1 i~rp· µ ~ri−zzi g~rg ¶ (2.36) denominado aberraci´on de la onda difractada [HS78], puesto que esta aberra-ci´on se encuentra relacionada ´unicamente con la propagaci´on de la onda, y no con las caracter´ısticas f´ısicas del sistema ´optico.
2.3. Propagaci´on de im´agenes aberradas 39 De la expresi´on 2.35 podemos despreciar todos los t´erminos excepto los cuatro pri-meros en el caso de que se cumpla que:
µ 1 z3 i − 1 z3 g ¶ a4 < λ 8 (2.37)
donde a es el m´aximo valor de rp. Esta condici´on equivale a imponer que la
contri-buci´on de la aberraci´on esf´erica sea menor a λ8. En este caso, la amplitud compleja puede escribirse como:
∆Ui(~ri; ~r0; zi) = −λzii exp
½ ik · (zi− zg) + 12 µ r2 i zi − r2 g zg ¶¸¾ ×R P (~rp; ~r0; zi) exp · −2πiλzi~rp· µ ~ri−zgzi~rg ¶¸ d~rp (2.38)
En esta expresi´on, P (~rp; ~r0; zi) corresponde a la denominada funci´on desenfocada
de pupila, e indica que la imagen es observada en un plano diferente del plano ima-gen paraxial. P (~rp; ~r0; zi) = P (~rp; ~r0) exp · ik 2 µ 1 zi − 1 zg ¶ r2p ¸ (2.39) Analizando la expresi´on 2.39, se puede considerar que se encuentra compuesta de dos t´erminos claramente diferenciados: por un lado, la funci´on pupila del sistema:
P (~rp; ~r0) = A(~rp; ~r0)e[ikW (~rp;~r0)] , en el interior de la pupila de salida
= 0 , en el exterior de la pupila de salida (2.40) donde W (~rp; ~r0) indica la diferencia de caminos ´opticos entre un rayo cualesquiera
y el rayo principal al propagarse hasta la esfera de referencia gaussiana. Por otra parte, en el supuesto de que el plano de observaci´on no coincida con el plano paraxial, aparece el t´ermino de desenfoque, el cual representa la longitud del camino ´optico a˜nadido que debe recorrer un rayo hasta la nueva esfera de referencia desenfocada, centrada ahora en el nuevo plano de observaci´on:
∆W = 1 2 µ 1 zi − 1 zg ¶ rp2 (2.41)
As´ı, puesto que el plano de observaci´on no corresponde al paraxial, sino que se en-cuentra desplazado respecto a ´este una distancia ∆z = zi− zg, la esfera de referencia
estar´a centrada en la posici´on de dicho plano de observaci´on, con lo que zi = R. Se
debe tener en cuenta, adem´as, que si el objeto es puntual y se encuentra situado sobre el eje ´optico, la posici´on de su imagen gaussiana ser´a ~rg = (0, 0).
Por lo tanto, considerando todos estos aspectos, la expresi´on 2.38 se puede reescribir como: ∆Ui= − i λzi exp ½ ik · (zi− zg) + r2i 2zi ¸¾ Z P (~rp; ~r0; zi) exp · −2πi λzi ~rp· ~ri ¸ d~rp = − i λzi exp · ik∆z ¸ exp · ikx2i + y2i 2zi ¸ Z P (~rp; ~r0; zi) exp · −2πi µ xpxi+ ypyi λzi ¶¸ d~rp = − i λRexp · 2πi λ ∆z ¸ exp · 2πi λ x2 i + y2i 2R ¸ Z P (~rp; ~r0; zi) exp · −2πi µ xpxi+ ypyi λR ¶¸ d~rp (2.42) Dejando de lado t´erminos constantes irrelevantes, de manera que las expresiones se simplifiquen, y si a partir de ahora denominamos a las coordenadas (xp, yp) simple-mente como (x, y) la distribuci´on de luz en el plano imagen se puede escribir como [HY70]: U (xi, yi) = exp · 2πi λ x2 i + y2i 2R ¸ Z Abertura P (x, y) exp · −2πi µ xxi+ yyi λR ¶¸ dxdy (2.43)
donde P(x,y) corresponde a la funci´on generalizada de pupila:
P (x, y) = A(x, y)ei2πλW (x,y) (2.44)
En esta ´ultima expresi´on, A(x, y) representa la transmitancia de la pupila (que corres-ponder´a a la imagen mostrada en el modulador) y W(x,y) la aberraci´on de onda. Por otro lado, el t´ermino de fase cuadr´atica presente en la expresi´on 2.43 se anula en la segunda etapa de la difracci´on en un correlador, de manera que de las ecuaciones 2.43 y 2.44 resulta que la calidad de la transformada de Fourier de A(x, y) depender´a ´unica y exclusivamente de la aberraci´on de onda del sistema.