Il motore in corrente continua
C.1 Principio di funzionamento
Sia che si parli di motori che di generatori (Fig. C.1), le macchine a corrente continua vengono realizzate con un indotto rotante, anche detto armatura o rotore, costituito da un cilindro di materiale magnetico sulle cui periferia, entro cave tagliate lungo le generatrici, sono disposti i conduttori che formano l’avvolgimento di indotto; e un induttore fisso, anche denominato statore, costituito da poli atti a produrre il campo di induzione magnetica B, con delle piccole espansioni polari che avvolgono, con un piccolo traferro, il sistema indotto.
Fig. C.1 – Schematizzazione macchina elettrica con indotto rotante indicato con A e induttore costituito da poli magnetici.
In particolare, parlando di motore in corrente continua, è essenziale capire che nel funzionamento esistono simultaneamente il principio motore e generatore. Il primo effetto è legato all’azione delle forze agenti sui conduttori di armatura immersi in un campo di induzione magnetica, quando sono attraversati da una corrente elettrica. Il secondo è legato alla forza elettromotrice indotta nei conduttori di armatura per effetto del loro moto ad una certa velocità nello stesso campo di induzione. È noto infatti dalla fisica, che la forza istantanea agente su un conduttore di lunghezza l percorso da una corrente i e immerso in un campo di induzione magnetica B (Fig. C.2) vale:
f =B⋅i⋅l⋅sin (C.1)
o meglio in notazione vettoriale:
f =l⋅i×B (C.2)
dove con si è indicato l’angolo compreso fra la direzione del campo magnetico e quella del flusso di corrente elettrica nel conduttore.
Fig. C.2 – Conduttore di lunghezza l e resistenza r con libertà di moto in direzione x, immerso in campo di induzione magnetica B con verso uscente, percorso da corrente i per effetto della
Nel caso dei motori per effetto della commutazione i conduttori di armatura sono sempre disposti in modo tale da risultare sempre perpendicolari ai vettori del campo di induzione B; di conseguenza la relazione (C.2) diventa:
f =B⋅i⋅l (C.3)
Si assuma la situazione di Fig. C.2, in cui un conduttore di lunghezza l immerso in un campo di induzione magnetica è libero di muoversi in direzione x perpendicolare al campo, allora, in base alla precedente discussione, si produce una forza sul conduttore che ne causa il moto in direzione x; moto che a sua volta induce una tensione nel conduttore che si oppone alla circolazione della corrente. Tale tensione indotta è comunemente chiamata forza controelettrometrice a causa della sua opposizione alla tensione applicata ed è esprimibile, secondo la legge di Faraday come:
e=B⋅l⋅v (C.4)
Quest’espressione è facilmente deducibile dal circuito scrivendo l’equazione alla maglia:
V −r⋅i=e (C.5)
moltiplicando entrambi i membri per i :
V⋅i−r⋅i2=e⋅i (C.6)
quindi per il principio di conservazione dell’energia, il differenziale di energia elettrica in ingresso eguaglia, a meno delle perdite nella resistenza r per effetto Joule, il differenziale dell’energia meccanica in uscita, cioè:
dWelet=dWmecc (C.7) quindi:
e⋅i⋅dt= f ⋅dx (C.8)
sostituendo per f l’espressione (C.3):
e⋅i⋅dt=B⋅i⋅l⋅dx (C.9)
da cui ritrovo l’equazione (C.4):
e=B⋅l⋅dx
dt=B⋅l⋅v (C.10)
Da ciò si deduce la possibilità di scambio reversibile di energia e la possibilità della stessa macchina di operare come motore o generatore in funzione del flusso energetico nel circuito di armatura.
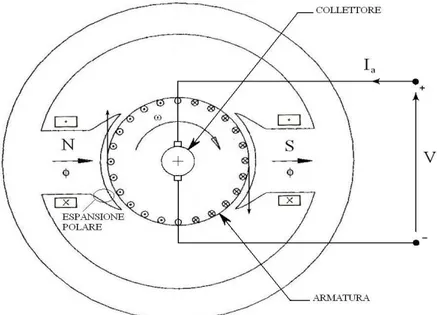
Fig. C.3 – Struttura complessiva di un motore in corrente continua, la corrente uscente è indicata con il punto, quella entrante con la croce.
Alla luce di quanto illustrato è evidente che, considerando una struttura complessiva del motore come quella di Fig. C.3, ci sarà un campo B, diretto sempre nella stessa direzione, per effetto dei poli disposti sullo statore, un rotore con conduttori di armatura, alimentati tramite contatti striscianti realizzati da una coppia di spazzole e un insieme di lamelle costituenti il cosiddetto collettore, che per effetto della rotazione mantiene sempre la stessa distribuzione di corrente negli avvolgimenti (quella di Fig. C.3), tale da generare una coppia di forze, detta coppia motrice T, costante e legata alla corrente di armatura tramite la relazione:
T = K⋅⋅i (C.11)
con flusso magnetico, K costante di conversione elettromeccanica ed i corrente che fluisce attraverso le spazzole.
In base agli stessi principi precedentemente visti, ai capi dei conduttori di armatura si manifesta una forza elettromotrice e, somma delle forze elettromotrici indotte su ogni conduttore degli avvolgimenti di armatura, che vale:
e=K⋅⋅ (C.12)
dove e K sono gli stessi della (C.12) e velocità angolare di rotazione espressa in radianti al secondo [12], [24], [33].
C.2 Equazioni caratteristiche del motore
È utile osservare che il comportamento di qualsiasi dispositivo elettromagnetico, considerato parte di un sistema elettromeccanico, può essere descritto in base alle equazioni delle tensioni di Kirchhoff e della coppia elettromagnetica.
coppia magnetica, o motrice, T (C.11) e la f.e.m. generata e (C.12) legate tramite la costante K=K⋅ rispettivamente alla corrente di armatura , che fluisce
attraverso le spazzole, e alla velocità di rotazione meccanica.
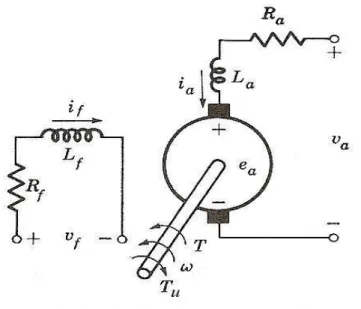
Fig. C.4 rappresentazione schematica di un motore in corrente continua.
Si consideri un semplice motore in corrente, rappresentato schematicamente come in Fig. C.4, alimentato con una tensione va ai capi del circuito di armatura e
una tensione vf ai capi degli avvolgimenti di campo (eccitazione indipendente). Si
può notare la presenza delle resistenze Ra e Rf , oltre alle autoinduttanze di
avvolgimento La e Lf , che tengono conto della resistenza insita nei conduttori con
cui si è realizzato gli avvolgimenti di armatura e di campo.
Mettendo insieme i risultati espressi nelle (C.11), (C.12) con l’equazione differenziale del moto del sistema meccanico, con le equazioni elettriche dei circuiti di armatura e di statore, e infine con la curva di magnetizzazione, è possibile descrivere il comportamento del sistema.
Supponendo trascurabile l’effetto di saturazione magnetica del ferromagnete costituente il motore, si avrà un legame di dipendenza lineare del flusso al traferro di asse diretto con la corrente di eccitazione dell’avvolgimento di campo if .
mutua fra i circuiti di statore e di armatura è nulla essendo appunto i loro assi magnetici perpendicolari.
Con la convenzione di Fig. C.4 per i versi delle correnti e delle tensioni l’equazione del circuito elettrico di statore è quindi:
vft =Lf⋅dif
dt Rf⋅ift (C.13)
Analogamente per il circuito di armatura si può scrivere:
vat=e tLa⋅dia
dt Ra⋅iat (C.14)
Inoltre per un motore l’equazione meccanica del moto semplificata risulta:
T t =J⋅d
dt Tu (C.15)
dove J è il momento d’inerzia complessivo di motore e carico, Tu è la coppia
resistente del carico.
Mettendo insieme queste equazioni con le relazioni di accoppiamento elettromeccanico del motore (C.11), (C.12) è possibile trovare la funzione di trasferimento del sistema rispetto alle grandezze di interesse e valutare le risposte e quindi il comportamento del sistema ad ingressi tipici.
È evidente che a regime (a fine delle fasi transitorie di t/dt=0 ,
d t/dt=0 ; inoltre si usa il carattere maiuscolo per indicare i valori a
regime) le equazioni dalla (C.13) alla (C.15) si riducono a:
Va=Ra⋅IaE (C.17)
T =Tu (C.18)
si sostituisce per e e T le espressioni (C.12) e (C.11) allora:
Va=Ra⋅IaK⋅ (C.19)
K⋅Ia=Tu (C.20)
Dalle equazioni (C.19), (C.20) segue:
Va=K⋅ Ra⋅Tu
K
(C.21)
Da (C.21) si può notare che, a meno della caduta di tensione sulla resistenza di armatura, che effettivamente risulta trascurabile rispetto alla tensione ai morsetti di armatura per come viene realizzato il motore, sussiste fra la tensione
Va ai morsetti di armatura e la velocità meccanica un legame di
proporzionalità diretta. Da (C.20) discende un analogo discorso per Tu e Ia .
Scrivendo l’equazione del moto completa, in cui si considera anche il coefficiente di attrito b legato all’attrito alla rotazione dell'albero motore che può essere considerato viscoso, si ha:
T t =J⋅d
dt b⋅t Tu (C.22)
È evidente che nell’equazione di regime (C.20), per effetto dell’attrito viscoso, avremo:
T =b⋅Tu (C.23)
quindi operando le solite sostituzioni:
Va=
K b⋅Ra K
⋅Ra⋅Tu K (C.24) Tu=
K b⋅Ra K
⋅Ia−b⋅Va K (C.25)Salta subito all’occhio come le relazioni fra Va e , e fra Tu e Ia presentino
una interdipendenza che può essere trascurata nelle situazioni del caso specifico in cui l’equazione del moto meccanico completa (C.22) sia riconducibile alla (C.15) con i risultati (C.20), (C.21).
Occorre osservare che la trattazione è stata svolta solo per il caso più generale di motore con eccitazione indipendente, è chiaro dunque che al variare della configurazione di eccitazione, cioè cambiando il modo in cui vengono reciprocamente alimentati il circuito di armatura e di statore, cambino le caratteristiche di funzionamento del motore [12], [24].