ContentslistsavailableatScienceDirect
Sensors
and
Actuators
A:
Physical
j our na l h o me p a g e :w w w . e l s e v i e r . c o m / l o c a t e / s n a
An
FPGA-based
versatile
development
system
for
endoscopic
capsule
design
optimization
C.
Cavallotti
a,∗,
P.
Merlino
b,
M.
Vatteroni
a,
P.
Valdastri
a,
A.
Abramo
c,
A.
Menciassi
a,
P.
Dario
aaTheBioRoboticsInstitute,ScuolaSuperioreSantAnna,Pisa56100,Italy bPTLab,AgemontS.p.A.,Amaro33020,Italy
cDIEGM,Universita’diUdine,Udine33100,Italy
a
r
t
i
c
l
e
i
n
f
o
Articlehistory:Received30September2010
Receivedinrevisedform11January2011 Accepted12January2011
Available online 31 January 2011 Keywords:
FPGA
WirelessCapsuleEndoscopy Sensor
a
b
s
t
r
a
c
t
Thisworkpresentsadevelopmentsystem,basedonFieldProgrammableGateArray(FPGA),thatwas
specificallydesignedfortestingtheentireelectronicstobeintegratedinanendoscopiccapsule,suchasa
camera,animagecompressionengine,ahigh-speedtelemetricsystem,illuminationandinertialsensors.
Thankstoitshighflexibility,severalfeaturesweretestedandevaluated,thusallowingtofindtheoptimal
configuration,intermsofpowerconsumption,performancesandsize,tobefitinacapsule.Asfinalresult,
anaverageframerateof19framepersecond(fps)overatransmissionchannelof1.5Mbit/swaschosen
asthebestchoiceforthedevelopmentofaminiaturizedendoscopiccapsuleprototype.
© 2011 Elsevier B.V. All rights reserved.
1. Introduction
WirelessCapsuleEndoscopy(WCE)isanemergingtechnology which is producing a bigimpact onthepracticeof endoscopy. A typicalendoscopiccapsule isequipped withanimaging sen-sor,anilluminationsystem,animageprocessor,aradio-frequency transmitter and a power sourcewhich provides energy to the wholesystem[1].WCEseemstobesuperiorinthediagnosisof thesmallbowelpathologiestootherpainlessimagingmodalities, suchasX-ray,computerizedtomographicenterographyand mag-neticresonanceenteroclysis,becauseitprovidesadirectvisionof somegastrointestinal(GI)tractsotherwisedifficulttoreach with-outsurgery[2].Thistechnologyhashelpeddoctorstodiagnose pathologies suchas obscure GIbleeding, small-bowel tumours, Crohn’s disease,and celiac disease[3]. Moreover,WCE reduces theinvasivenessandpainoftraditionalproceduresresultingmore acceptableforpatients.
Sinceitscommercialdistributionin2002,differentcapsulesare nowavailableonthemarket[4].Despiteofseveralenhancements
[5],mainlimitationsarestillrelatedtocorepartssuchasthevision system.Thecommerciallyavailableendoscopiccapsuletransmits theimagesattheresolutionof256-by-2568-bitpixelswitha maxi-mumframerateof7fps.Thisframerateisnotenoughforarealtime videostreaming,whichishighlydesirableforacorrectdiagnosis. However,theselimitationsmustbeovercometakingintoaccount
∗ Correspondingauthor.
E-mailaddress:[email protected](C.Cavallotti).
thelimitedpowersupplyandthemaximumdimensions(11mm in diameter(d)×31mminlength(l))suitable fora swallowable device.
OuraimistodevelopaWCEdevicewithrealtimevision,thus framerateatleastof15fpsmustbeguaranteedinordertoavoid flashingimages[6].Moreover,ahighimagequalityintermsof fea-tureperception,noiseandsufficientilluminationhastobeassured toachieveacorrectdiagnosis.
Asapreliminarywork,wedevelopedaversatiledevelopment system,basedonanFPGAdevice,fortestingdifferent configura-tionsofsomesub-moduleswhicharecorepartsinthecapsule, suchasacamera,anilluminationsystem,butalsoahighdatarate transmitterandacompressorenginewhicharecrucialtoreachthe desiredframerate.Themainfeatureoftheproposedsystemisthe highflexibility,whichallowstoinvestigatethewholevision sys-temchainandtohighlightthecriticalissues.TheFPGAcoremakes developmentsystemeasy-fittingtodifferentconfigurationswhich canbetestedwithoutanyphysicalhardwarechange.Thissystem canbeusedasacasestudyforassessingtheoptimumconfiguration intermsofperformance,powerconsumptionandoverall dimen-sions,andtosolvethecriticalaspectsbeforetostartthedesignof theminiaturizedversionsuitableforWCEapplications.
2. Developmentsystemarchitecture
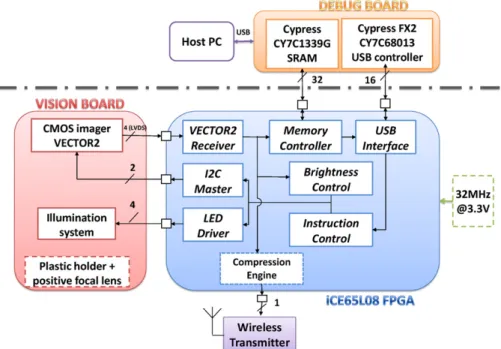
The system is composedby three units: a dedicated vision board, a main control board and a third board for debug pur-poses(Figs.1and2).Inthefollowingsectionstheseboardswill bedescribedindetails.
0924-4247/$–seefrontmatter © 2011 Elsevier B.V. All rights reserved. doi:10.1016/j.sna.2011.01.010
Fig.1. Developmentsystemwithopticsandilluminationsystem.
2.1. Visionboard
ThecoreofthevisionboardisacustomComplementary Metal-Oxide Semiconductor(CMOS)imagesensor,calledVector2.The chip was produced in the UMC 0.18!-CIS (CMOS Image Sen-sor)technologyandincludesaQuarterofVGA(QVGA)320× 240 pixel array witha Bayer Color Filter Array(CFA) up, the com-pletereadoutchannel,a10-bitAnalog-to-Digitalconverter(ADC), aseriesofDigital-to-Analogconverters(DAC)forinternal refer-encesanddigitalblocksforthechipcontrol[7].AnI2C-likeinput isusedforsettingand controlwhilea seriallow-voltage differ-entialsignaling (LVDS) output interface allows totransmit the data.Arollingshutterread-outisimplementedinorderto max-imize sensitivity of the sensor. Its highsensitivity, low power consumptionandasimplecontrolofthefullchipmakeitsuitable for WCE applications. Taking into account thephysical dimen-sion of the Vector2 sensing area (1.408mminhorizontal(d)× 1.056mminvertical(
v
))andthedepthoffocusfrom1mmto10 mmwhichisdrivenbythefinalapplication,acommercial posi-tivefocallens(NT45-589,EdmundOptics,NewJersey,USA)was chosen,withafocallengthof1mmandadiameterof1mm,thusachievingafieldofviewof82◦(h)×61◦(
v
).Aplastic,unreflectiveholderwasalsodesignedinordertofixandaligntheoptical mod-uleinfrontofthechip.Thevisionboardallowstoconnectdifferent types ofilluminationsystems. Fourwhite light-emittingdiodes (LED)werearrangedontoaroundshapeprintedcircuitboard(PCB). Thedesignofthisilluminationsystemwascarriedoutconsidering atrade-offbetweenpowerconsumption,sizeandtheamountof lightnecessaryfordiagnosticpurposes.Takingintoaccountthese features high efficiency LEDs (Nesw007AT, Nichia, Nokushima, Japan) were chosenwith a dimensionof 1.2mminheight(h)× 2mminwidth(w)×1.3mminthickness(t)andlightintensityof [email protected][8].
ThewhiteLEDsboardcanbereplacedwithcolorLEDsboard withnomajordesignchangesinthehardware,inordertoobtain whitelightbycolorlightcombination[9]ortoenablespectroscopic imaging,suchasautofluorescenceimaging[10].Inthesecases,the colorLEDsarecontrolledbyindependentdrivingcircuits imple-mentedontheFPGAenablingaprecisecontrolontheamountof lightprovidedtothescene,aswillbeexplanedinmoredetailsin Section3.1.
2.2. ControlboardandFPGAarchitecture
ThecontrolboardisbasedonaFPGAwhichimplementsthe mainfunctionalitiesofthewholesystem.FPGAswereintroducedas analternativetodigitalcustomIntegratedCircuits(ICs)for imple-mentingtheentiresystemononechipandtoprovideflexibility of re-programmabilitytotheuser[11]. Therefore,thanksto its high-flexibilityandlowcost,FPGArepresentsthebestchoicefor testingdifferentsolutionstoselecttheoptimalforourapplication. AdetailedbenchmarkanalysiswascarriedouttochooseanFPGA, suitablenotonlyfortestingpurposebutalsotobeintegratedin afutureminiaturizedversionofthesystem,whichwillbefitted inanendoscopicpill.Asconsequence,parameterssuchaspower consumption,physicalsizeandoverallgatecountweretakeninto account.AcompactsystemfromSiliconBlue(iCE65L08)was cho-senbeing4.79(h)×4.37(
v
)mmin sizewitha verylow power consumption(12mA@32MHz).ThesefeaturesmaketheiCE65L08 suitabletobefitinanendoscopicpill.Inordertohavearealtimevideo streaming,aframerateof atleast15fpsisneeded.However,increasingtheamountofdata causeshugeincreaseinpowerconsumptionintheRFtransmission
[12],thatisthemainconstraintinWCE.Hence,applyingimage compressionisnecessaryforlimitingthetransmissionworkload andsavingthepowerdissipation.
A compression engine which is well suited for WCE must havelowpowerconsumption,logicresourcesandlimited mem-orysizeneededforthecompression.CurrentJPEGcompression chipsrequiretheavailabilityofaconsiderableamountofhardware resourcesresultinginahighpowerconsumption(typicallymore than 100mW),which is notacceptablein this application[13]. Amongsimplededicatedalgorithms,wechosethelow-complexity compressionenginedevelopedby[14]becauseitsperformances arecomparablewithJPEG2000,butloweringthecomplexity allow-ingitsimplementationonthechosenFPGA.
TheFPGAisalsousedtodistributetheclocktothewhole sys-tem. The imagesensor is then driven by a [email protected] clock, [email protected] [email protected].
AsinFig.2,severallogicblockswereimplementedontheFPGA inordertocarryoutsomebasictaskssuchastheVector2 config-uration,theimageacquisitionandilluminationcontrol.Moreover, asimplePC-basedsoftwareallowstheusertoconfiguretheFPGA andthevisionchipandtoshowtheacquiredimagesonscreen throughtheUSBconnection.TheVector2configurationtaskis per-formedbytheUSBInterface,theInstruction(n.b.)ControlandI2C Masterblocks.Theconfigurationdata,sentbytheuserthroughthe developedsoftware,arereceivedbytheUSBInterfaceblockthat interconnectstheFPGAwiththeexternalCypress FX2USB con-troller.TheInstructionControlblockdecodestheinstructionsand sendstheconfigurationdatatotheI2CMasterblock.Finally,theI2C MasterconfigurestheVector2chipthroughtheI2Cbus.The Instruc-tionControlblocksendsconfigurationdataalsototheLEDDriverin ordertocontroltheLEDsandtheamountoflightprovidedtothe scene,asitwillbeexplainedinSection3.1.Aftertheconfiguration phase,theVector2Receiverdecodesthedataacquiredbythevision chip,convertingtheLVDSsignalstoa10-bitparallelformat.Then theacquiredframesarestoredintheexternalSRAMchip,whichis usedasaframebuffer.Thememorizedframescanbereadfromthe SRAMbytheMemoryControllerblockandsenttothePCthrough theUSBInterfaceblockandexternalUSBcontroller.
Thelogicblocksimplementedinthisconfigurationarewritten withVHSICHardwareDescriptionLanguage(VHDL),anduse31%1
ofthetotalFPGA(2400logiccells)andcanoperateatamaximum frequencyofabout41MHz.Thepowerconsumptionofthe devel-opedsystemislessthan360mWanditsplitsasfollows:40mW fortheVector2chip,about10mWfortheFPGAand310mWfor debugblockswhichwillbenotforeseeninthefinalminiaturized prototype.
2.3. Debugboard
Thesystemisalsoequippedwithadebugboardtoincreasethe flexibilityofthesystem.TheboardisequippedwiththeCypress FX2USBcontrollerthatprovideshigh-speedconnectionandfully configurabilitybytheintegrated8051microcontroller.Thedebug boardisalsoequippedbytheCypressCY7C1339GSRAMchipthat isusedasframebufferfortheacquisitionofimagesfromthe sen-sorchipandtostoreadditionaldataforimageprocessing.Finally, severalconnectorsareusedtomonitoreachpinoftheFPGA.The
1WeusethelogiccellsasameasureoftheFPGAresourcesoccupation.The pre-sentedareaoccupationreferstothebasicconfiguration,withoutthecompressor, brightnesscontrolblockorwirelesstransmitterblock.
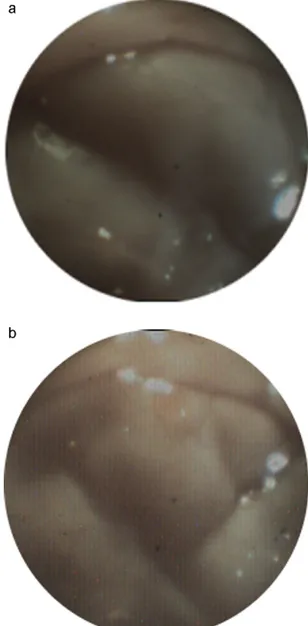
Fig.3.Acquiredimagesfromdifferentgastrointestinaltracts,duringexvivotests.
purposeofthisboardistoprovidearealtimedebugplatformforthe wholedemosystem.APC-basedsoftwareisusedtosetupthe reg-istersoftheFPGAandoftheVector2chipandtomonitorthestatus ofthesystemthroughtheUSBconnection.Theacquiredimagesare storedintheSRAM,senttothePCandshownonthescreen.Finally, theUSBconnectionisusedalsoforthecontroloftheillumination andtheLEDdrivers.
3. Testsandsub-modulesintegration
Some experiments were done totest separately and finally togethereachsub-modulewhichwillbeintegratedinthefinalpill.
3.1. Imagesacquisitionandbrightnesscontrol
Atfirst,imagesfromexvivoanimaltissuewereacquiredusing thevisionboard,withtheopticsandwhiteillumination,inorder todefinetheimagerandilluminationcontrolsettingsnecessaryto achieveasuitableimagequalityfordiagnosticpurposes(Fig.3(a) and(b)).AsimpleLEDdriverwasimplementedintheFPGAable tosettheamountoflightdrivingtheLEDsbyaPulseWidth Mod-ulation(PWM)technique.TheLEDdriverswitchesonandoffthe
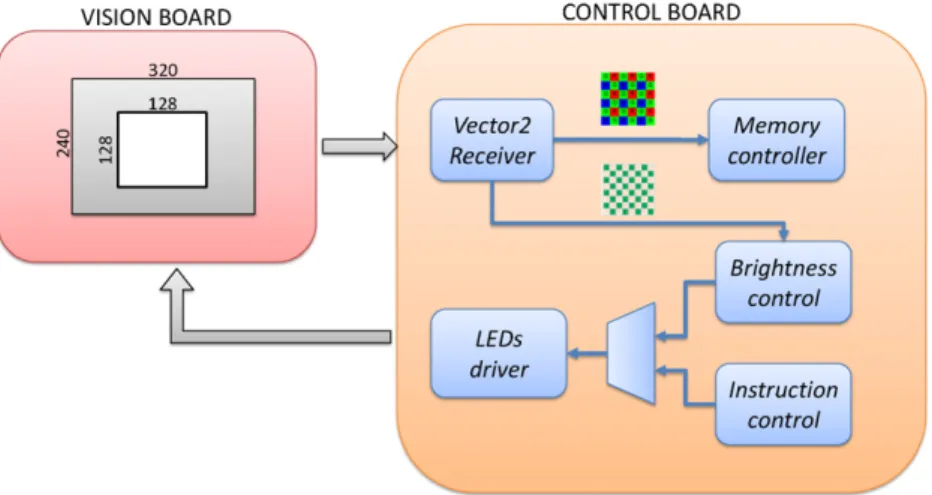
Fig.4.Imageblocksusedtobrightnesslevelestimationandbrightnesscontrolarchitecture.
illuminationduringtheintegrationtimeoftheopticalsensor,thus modulatingtheaveragecurrentprovidedtotheLEDs.Thelength ofthecurrentpulsesprovidedtotheilluminationsystemandtheir numberaresetbyafewinternalregisters,whichcanbemodifided inrealtimewiththeUSBconnection.However,theillumination isswitchedononlywhentheopticalsensorisinitsintegration phaseinordertoavoidflickeringeffects.InthecaseofRGBLEDs, threedriverscontrolledbythreedifferentgroupsofregistersare implementedontheFPGAinordertodriveeach groupof LEDs independentely.SinceinarealapplicationsuchasWCE,itisnot desirabletomanuallysettheproperamountoflight,wealso imple-mentedanautomaticbrightnesscontrolsystem.
Inmodernvisionsystems,thebrightnessoftheacquiredimages dependsonseveralfactors.Amongothers,themostimportantones arethelens,thesensitivityandintegrationtimeofthevisionsensor andtheillumination.Inourprototypethelensischosenbasedon thefieldofviewandsizerequirements,whiletheintegrationtime ofthesensorisfixedinordertoachievethedesiredframerate.Asa consequence,wecansetthebrightnessoftheimagesbycontrolling theamountoflightprovidedtothescene.Thisisequivalentto con-troltheexposuretimeinstandarddigitalcameras.Exposurecontrol algorithmstypicallydividetheacquiredimageinseveralblocksand computetheaverageluminancesignalineachblock.Thentheblock luminancevaluesarecombinedwithdifferentweightsinorderto estimatebacklitorfrontlitscene[15].Sinceinourapplicationthe onlypossiblecaseisthefrontlitbecausetheonlysourceoflightare theLEDs,wedecidedtocomputetheaverageluminancesignalof asingle128×128pixelsblockinthecentreoftheimage(Fig.4). Moreover,wecannotcomputetheluminancevaluesofthepixels becauseoftheBayerCFAmountedontheVector2chipandthe lackofthedemosaicingblock.Consequently,wedecidedto esti-matethebrightnessbasedonlyonthegreenpixelvaluesbecause thegreencomponentmostlycontributestotheluminanceofan image[16]andinaBayerfiltertheirnumberaredoublethanthe redand blueones.Thebrightness controlblockreadsthepixel valuesrecoveredbythereceiveranddrivestheLEDdriverblock accordinglywiththeestimatedbrightnesslevel.Hence,theLEDs intensityiscontrolledtomaintainthebrightnesswithinadefined interval.TheLEDsaredrivenbythedefinedsequenceofcurrent pulsesonlyduringthesensorintegrationtimeinorder to min-imizethepowerconsumption. Thisstrategy allowsnot only to accuratelycontroltheamountoflightprovidedtothescenebut alsotosimulateaglobalshutter.Theentiresensorstartsgathering lightwhentheLEDsareturnedon,whilethecontentsofthe sen-sorarereadoutwhentheyareturnedoff,thusminimizingimage artefacts[17].
TheFPGA implementationoftheproposedbrightness control blockuses320logiccells,whiletheimpactonthemaximumclock frequencyisminimal.
3.2. Columnpatternnoisecorrection
TheCMOSimagersoftensufferfromFixedPatternNoise(FPN)
[18].FPNisanon-temporalspatialnoise,anditiscausedbythe non-uniformityofthetransistor’scharacteristicswithinthepixels andthecolumnamplifier,thisresultingfromfabricationprocess tolerances.ThepixelFPNnoiseisusuallyremovedatthepixellevel byhardwaresubtraction,whileawaytoeliminatethecolumnFPN isasubtractionbetweentheacquiredimageandareferencedark image.Thissimplemethodrequiresthatthedarkimageisacquired and stored intotheFPGA or intheexternal SRAM. Sincea full framecannotbememorizedinsidetheFPGAbecauseofthelack ofmemoryandintherealapplicationitisnotdesirabletousean externalSRAM,wedevelopedandtestedanalternativeversionof thealgorithmthatreducesthememoryrequirements.Ourideais tocomputethemeanvaluesoftheevenandoddrowsofadark imageandtorecursivelysubtractthesefromtheacquiredimages. Inthisway,thememoryrequirementsofthearchitecturecanbe reducedtotworowsonly(2×320×10bits).Wecomputetwo dif-ferentmeanvaluesforevenandoddrowsbecausetheCFAmounted ontheimagerusesapatternof2×2pixels.
Atfirst,theilluminationisswitchedoffandtheFPGAstartsto acquireadarkimage.Eachcoupleofrowsisaccumulatedina two-rowsmemoryinsidetheFPGA.Attheendoftheacquisition,the averagevaluesarecomputed.ThentheLEDsareswitchedonand whenthenextimageisreceivedbytheFPGA,thereferencedark rowsaresubstractedfromeachcoupleofrowacquired.Fig.5(a) showstheimagewiththeFPN,whileFig.5(b)showstheresult ofthecorrectionstrategy.Theresultingimageisbetterinterms ofperceivedresolution.Inordertoevaluatetheeffectivenessof ouralgorithmwecalculatedthestandarddeviationofthe origi-nalimageandtheelaboratedone.Since thefixedpatternnoise isashort-rangenoise,weacquiredawhiteimagewithanuniform illuminationinordertoexcludethecontributionofimagecontrasts anddarkfixedpatternnoise.Weobservedthatthestandard devi-ationoftheimageafterelaborationis20%lessthantheoriginal one.
3.3. Compressorimplementation
In ordertofulfiltheframeraterequirements, a image com-pressorwasimplementedontheFPGA.Severalcompressorswere
Fig.5. Originalimageanddenoisedimagewithreconstructeddarkimage.
tested[13,19]takingintoaccountthepowerlimitationandsmall sizeconditionswhicharethemainfeaturesofWCE.Forthese rea-sons,alow-power,low-complexitylossycompressorspecifically developed for capsule endoscopy was chosen [14]. The imple-mentedcompressorisbasedonintegerversionofdiscretecosine transform(DCT)andperformssequentiallyfouroperations:color transformation, image transformation, coefficients quantization andentropycoding.Thisconfigurationconsumesabout77%ofthe resourcesoftheFPGAand25blockRAMsandcanworkata fre-quencyofupto39MHz.
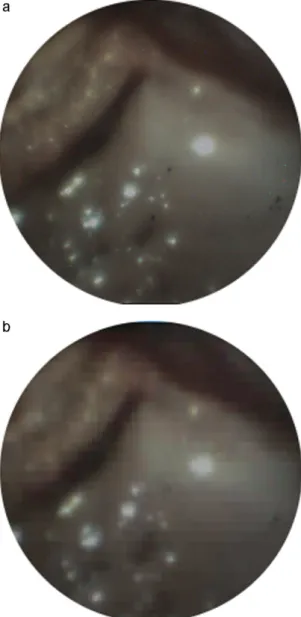
Finally,theresultsoftheimplementationofthechosen com-pressorcanbeseeninFig.6(a)and(b).Thefirstpictureshows animage acquiredwithan integrationtimeof 50ms and LEDs switchedonfor25ms,whilethesecondoneshowsthesameimage afterthecompressionstagewitharatioofabout8.Ascanbeseen, thecompressorintroducessomeartifactsduetothelossynatureof thecompressionalgorithm,butthequalityoftheimageissufficient fordiagnosticpurposes.Asafinalremark,itcanbenotedthatthe compressionratiocanbesetthroughaproperchoiceofthe com-pressorparameters,thusallowingthereductionoftheamountof databetween8and20[14].
Fig.6.Acquiredimagesbeforeandaftercompression.
Fig.7. Miniaturizedprototype.
4. Conclusionsandfutureworks
AnFPGA-baseddevelopmentsystemwasdesignedinorderto test a complete wireless imaging acquisition chain suitable for WCE.Thefinalgoalistoachieveasmoothrealtimevideostream withatleast15fpsandlowpowerconsumption.
Themainchallengefacedintegratingthesystem,inorder to enablearealtimediagnosis,wasrelatedtoimagecompressionand wirelessvideostreamtransmissionvs.theoriginaldatapayload.
After the analysis of several wireless technologies [20], we decidedtoimplementthetransmitterpresentedinRef.[21].The chosensolutionisbasedonnear-fieldtechnologyandpresentsthe bestperformanceintermsofdatarateandthebestefficiencyin termsofpowerconsumptionvs.datarate[20],enablinga trans-missionof1.5Mbit/[email protected].
SincetheVector2imagerresolutionisaQVGAandeachpixelis decodedby10bits,theoriginalamountofdataforeachframeis 768kbit.Consideringanaveragecompressionratioof10,the min-imumframerateis19.53fpswithanoverallpowerconsumption [email protected]@1.8V.
Consideringtheresultsobtainedwiththedevelopmentsystem, aminiaturizedversionwasdesignedandnowundertest(Fig.7). Theprototypeconsistsoftwoboardsconnectedbyapermanent flexible interconnectionwitha diameterof9.9 mmin order to fitinapillcasewithaninnerdiameterof10mm.Moreover,the additionalthreeflexiblecircuitpartsallowtheconnectionofother boardswithcomponentsrequiredbythesystem,suchasbattery orwirelesspowersupply[22]andinertialsensors[23].
Acknowledgements
TheworkdescribedinthispaperwasfundedbytheEuropean CommissionintheframeworkofVECTOR FP6Europeanproject EU/IST-2006-033970.
References
[1]P.Swain,Thefutureofwirelesscapsuleendoscopy,WorldJournalof Gastroen-terology14(26)(2008)4142–4145.
[2]Z.Fireman,Y.Kopelman,Newfrontiersincapsuleendoscopy,Journalof Gas-troenterologyandHepatology22(8)(2007)1174–1177.
[3]S.D.Ladas,K.Triantafyllou,C.Spada,M.E.Riccioni,J.F.Rey,Y.Niv,M.Delvaux, R.deFranchis,G.Costamagna,theESGEClinicalGuidelinesCommittee, Euro-peansocietyofgastrointestinalendoscopy(esge):Recommendation(2009)on clinicaluseofvideocapsuleendoscopytoinvestigatesmall-bowel,esophageal andcolonicdiseases,Endoscopy42(2010)220–227.
[4]J.L.Toennies,G.Tortora,M.Simi,P.Valdastri,R.J.Webster,Swallowable med-icaldevicesfordiagnosisandsurgery:thestateoftheart,Proceedingsofthe InstitutionofMechanicalEngineers.PartC.JournalofMechanicalEngineering Science224(7)(2010)1397–1414.
[5]A.Moglia,A.Menciassi,M.O.Schurr,P.Dario,Wirelesscapsuleendoscopy:from diagnosticdevicestomultipurposeroboticsystems,BiomedicalMicrodevices 9(2)(2007)235–243.
[6]J.Y.C.Chen,J.E.Thropp,Reviewoflowframerateeffectsonhumanperformance, Systems,ManandCybernetics,PartA:SystemsandHumans,IEEETransactions on37(6)(2007)1063–1076.
[7]M.Vatteroni,D.Covi,C.Cavallotti,L.Clementel,P.Valdastri,A.Menciassi, P.Dario,A.Sartori,Smartopticalcmossensorforendoluminalapplications, SensorsandActuatorsA:Physical162(2)(2010)297–303.
[8]http://www.nichia.co.jp/.
[9]N.Narendran,N.Maliyagoda,L.Deng,R.M.Pysar,Characterizingledsfor gen-eralilluminationapplications:mixed-colorandphosphor-basedwhitesources, Proc.SPIE4445,(2001)137.
[10]M.Kato,M.Kaise,J.Yonezawa,K.Goda,H.Toyoizumi,N.Yoshimura,Y.Yoshida, M.Kawamura,H.Tajiri,Trimodalimagingendoscopymayimprove diagnos-tic accuracyofearlygastricneoplasia:afeasibilitystudy,Gastrointestinal Endoscopy70(5)(2009)899–906.
[11]N.Sulaiman,Z.A.Obaid,M.H.Marhaban,M.N.Hamidon,Designand implemen-tationoffpga-basedsystems–areview,AustralianJournalofBasicandApplied Sciences3(4)(2009)3575–3596.
[12]K.Wahid,S.B.Ko,D.Teng,Efficienthardwareimplementationofanimage compressorforwirelesscapsuleendoscopyapplications,in:NeuralNetworks, 2008.IJCNN2008.(IEEEWorldCongressonComputationalIntelligence).IEEE InternationalJointConferenceon,2008,pp.2761–2765.
[13]D.Turgis,R.Puers,Imagecompressioninvideoradiotransmissionforcapsule endoscopy,SensorsandActuatorsA:Physical123-124(2005)129–136. [14]P.Turcza,T.Zielinski,M.Duplaga,Hardwareimplementationaspectsofnew
lowcomplexityimagecodingalgorithmforwirelesscapsuleendoscopy, Com-putationalScienceICCS(2008)476–485.
[15] R.Ramanath,W.E.Snyder,Y.Yoo,M.S.Drew,Colorimageprocessingpipeline, SignalProcessingMagazine,IEEE22(1)(2005)34–43.
[16]Q.K.Vuong,S.H.Yun,S.Kim,Anewautoexposuresystemtodetecthigh dynamicrangeconditionsusingcmostechnology,in:ConvergenceandHybrid InformationTechnology,2008.ICCIT’08.ThirdInternationalConferenceon, 2008,pp.577–580.
[17]S.Lauxtermann,A.Lee,J.Stevens,A.Joshi,Comparisonofglobalshutterpixels forCMOSimagesensors,in:Proc,2007InternationalImageSensorWorkshop, OgunquitMaine,USAJune7–10,2007.
[18] A.Theuwissen,Digitalimaging:imagecapturing,imagesensors,technologies andapplications,CEIEurope,2004.
[19] M.-C.Lin,L.-R.Dung,P.-K.Weng,Anultra-low-powerimagecompressorfor capsuleendoscope,BioMedicalEngineeringOnLine5(1)(2006)14. [20] M.R.Yuce,T.Dissanayake,H.C.Keong,Wirelesstelemetryforelectronicpill
technology,in:IEEESENSORS2009,2009.
[21] J.Thone,S.Radiom,D.Turgis,R.Carta,G.Gielen,R.Puers,Designofa2mbpsfsk near-fieldtransmitterforwirelesscapsuleendoscopy,SensorsandActuators A:Physical156(1)(2008)43–48.
[22]R.Carta,J.Thon,R.Puers,Awirelesspowersupplysystemforroboticcapsular endoscopes,SensorsandActuatorsA:Physical162(2)(2010)177–183. [23]G.Ciuti,P.Valdastri,A.Menciassi,P.Dario,Roboticmagneticsteeringand
locomotionofcapsuleendoscopefordiagnosticandsurgicalendoluminal pro-cedures,Robotica28(SpecialIssue02)(2010)199–207.
Biographies
CarmelaCavallottireceivedadegreeinbiomedicalengineering(withhonours) fromtheCampusBio-MedicoUniversityinRomeinDecember2007.Sheiscurrently aPhDstudentinbioroboticsattheCRIMLaboftheScuolaSuperioreSant’Annain Pisa.Hermainresearchinterestsareinthefieldsofvisionsystemsforbiomedical applications.
PierantonioMerlinowasborninUdine,Italy,in1980.Hereceivedthelaureadegree inelectricalengineering(summacumlaude)fromtheUniversityofUdine,Italy, in2005andthePhDdegreeinelectricalengineeringfromthesameInstitutionin 2009.Hisresearchinterestsincludesthestudyandrealizationofelectronic sys-temsforpervasivecomputingapplications,communicationandpowertechnologies forwireless/contactlessapplications.Currentlyheisworkingonvisionsystemsfor endoscopicapplications.
MonicaVatteroniwasborninLaSpezia,Italy,in1975.ShereceivedanM.S.degreein electricalengineeringfromtheUniversityofPisa(Italy)in2001andaPhDdegreein physicsfromtheUniversityofTrento(Italy),in2008.From2002to2008,sheworked forNeuriCam,Trento(Italy),aspixelengineerandanaloguedesigner,andin2005 shebecameresponsibleforthedevelopmentofCMOSImageSensors.Presently, sheworksfortheScuolaSuperioreSant’AnnainPisa(Italy)aspostdoctoralfellow, wheresheisresponsiblefortheresearchanddevelopmentofimagesensorsand visionsystemsforbiomedicalapplications.Sheistheauthorandco-authorof sev-eralconferenceandjournalpublicationsandofthreepatents.Herinterestsinclude CMOSimagesensors,lownoiseanalogueelectronics,highdynamicrangepixelsand endoscopicvisionsystems.
PietroValdastrireceivedadegreeinelectronicengineering(withhonours)from theUniversityofPisainFebruary2002.InthesameyearhejoinedtheCRIMLab oftheScuolaSuperioreSant’AnnainPisaasaPhDstudent.In2006heobtained aPhDinbioengineeringfromtheScuolaSuperioreSant’Annadiscussinga the-sistitled“Multi-AxialForceSensinginMinimallyInvasiveRoboticSurgery”.Heis nowassistantprofessoratCRIMLab,withmainresearchinterestsinthefieldof implantableroboticsystemsandactivecapsularendoscopy.Heiscurrently work-ingonseveralEuropeanprojectsforthedevelopmentofminimallyinvasiveand wirelessbiomedicaldevices.
AntonioAbramowasborninBologna,Italy,in1962.Hereceivedthelaureadegree inelectricalengineering(magnacumlaude)fromtheUniversityofBologna,Italy, in1987,andthePhDdegreeinelectricalengineeringfromthesameInstitutionin 1995.HisexperienceincludesresearchperiodswiththeIntelCorporation,Santa Clara(CA),USA(1992),attheCenterforIntegratedSystems,StanfordUniversity, Stanford(CA),USA(2000).BetweenOctober1993andDecember1994hewas resi-dentscientistattheAT&TBellLaboratories,MurrayHill(NJ),USA,whilefrom1995 to1997hewaspost-docattheDepartmentofPhysics,UniversityofModena,Italy. AntonioAbramoisco-authorofabout70scientificpublicationsonInternational JournalsandConferences.Inyears2001–2002hehasbeenappointedmemberof the“ModelingandSimulation”technicalsub-committeeoftheIEEEInternational ElectronDeviceMeeting(IEDM)Conference,andinyear2003Chairofthesame sub-committee.Presently,heisassociateprofessorofelectronicsattheUniversity ofUdine,Italy.Afterabout10yearsofscientificactivityinthefieldofmodelingand simulationofcarriertransportinelectrondevices,startingfromyear2001his scien-tificinteresthasmovedtothedesignofcircuitandsystemforwirelessapplications, tothestudyofneuralnetworkscircuitsforreconfigurableplatforms,tothedesign ofwearablesystems,andtowardsthemethodologiesfordistributedcomputingin wirelesssensornetworks.
AriannaMenciassireceivedherlaureadegreeinphysics(withhonours)from the University of Pisa in 1995. In the same year, shejoined the CRIM Lab oftheScuolaSuperioreSant’AnnainPisaasaPhDstudentinbioengineering witharesearchprogramonthemicromanipulationofmechanicaland biologi-calmicroobjects.In1999,shereceivedherPhDdegreebydiscussingathesis
titled“MicrofabricatedGrippersforMicromanipulationofBiologicalandMechanical Objects”.CurrentlysheisaprofessorofbiomedicalroboticsattheScuola Supe-rioreSant’Anna,Pisa.Hermainresearchinterestsareinthefieldsofbiomedical microandnano-robotics,microfabricationtechnologies,micromechatronicsand microsystemtechnologies.SheisworkingonseveralEuropeanprojectsand interna-tionalprojectsforthedevelopmentofmicroandnano-roboticsystemsformedical applications.
PaoloDarioreceivedhislaureadegreeinmechanicalengineeringfromthe Univer-sityofPisain1977.Currently,heisaprofessorofbiomedicalroboticsattheScuola SuperioreSant’Anna,Pisa.Healsoestablishedandteachesthecourseon mechatron-icsattheSchoolofEngineering,UniversityofPisa.Hehasbeenavisitingprofessorat theEcolePolytechniqueFederaledeLausanne(EPFL),Lausanne,Switzerland,andat
WasedaUniversity,Tokyo,Japan.HeisthedirectoroftheCRIMLabofScuola Superi-oreSant’Anna,wherehesupervisesateamofabout70researchersandPhDstudents. Hismainresearchinterestsareinthefieldsofmedicalrobotics,mechatronicsand microengineering,andspecificallyinsensorsandactuatorsfortheabove applica-tions.HeisthecoordinatorofmanynationalandEuropeanprojects,theeditoroftwo booksonthesubjectofroboticsandtheauthorofmorethan200journalpapers.He isamemberoftheBoardoftheInternationalFoundationofRoboticsResearch.Heis anassociateeditoroftheIEEETransactionsonRoboticsandAutomation,amember oftheSteeringCommitteeoftheJournalofMicroelectromechanicalSystemsand aguesteditoroftheSpecialIssueonMedicalRoboticsoftheIEEETransactionson RoboticsandAutomation.HeservesaspresidentoftheIEEERoboticsand Automa-tionSocietyandastheco-chairmanoftheTechnicalCommitteeonMedicalRobotics ofthesamesociety.