Facoltà di Ingegneria
Laurea Specialistica in Ingegneria Aerospaziale
Tesi di Laurea
Caratterizzazione aerodinamica di un
velivolo ultraleggero mediante
metodologia CFD
Relatori:
Prof. Ing. Giovanni Lombardi
Ing. Marco Maganzi
Candidato:
Giacomo Daini
__________________________________________Se una persona non ha più sogni, non ha più alcuna ragione di vivere. Sognare è necessario, anche se nel sogno va intravista la realtà.
Per me, è uno dei principi della vita.
oggetto la caratterizzazione aerodinamica di un velivolo ultraleggero mediante metodologia CFD (Computational Fluid Dynamics).
Lo svolgimento del lavoro si articola in tre fasi principali descritte brevemente nel seguito.
Nella prima fase si genera il modello CAD (Computer Aided Design) delle superfici del velivolo. A tal proposito si osserva che il modello viene creato in modo tale da essere facilmente e velocemente modificabile, a seconda dei risultati delle varie analisi progettuali.
La seconda fase è rivolta alla caratterizzazione aerodinamica dei profili. In particolare si esaminano, tramite metodologia CFD, quattro profili alari e per ognuno di essi si ricava l’andamento, al variare dell’incidenza, del coefficiente di portanza, di resistenza, e di momento.
Nella terza, e ultima, fase si procede all’analisi fluidodinamica dell’intero modello tridimensionale del velivolo. Tramite metodologia CFD si ricavano: l’andamento del coefficiente di portanza, di resistenza, e di momento con flap in posizione neutra; il valore del massimo coefficiente di portanza con flap estratti a 5° e 16°; le derivate aerodinamiche CLα e Cmα che scaturiscono dalla variazione dell’angolo di incidenza; le derivate aerodinamiche Cyβ, Clβ, Cnβ che scaturiscono dalla variazione dell’angolo di imbardata; le derivate aerodinamiche CLδf, CDδf, Cmδf che
scaturiscono dalla variazione dell’angolo di rotazione dei flap; le derivate aerodinamiche Cyδa, Clδa, Cnδa che scaturiscono dalla variazione dell’angolo di
i INDICE... i INTRODUZIONE... iii 1. IL MODELLO CAD... 1 1.1 Le superfici portanti... 7 1.2 La fusoliera... 12
2. ANALISI DEI PROFILI ALARI... 14
2.1 Impostazione della simulazione fluidodinamica... 15
2.1.1 Importazione della geometria e creazione della regione fluida... 16
2.1.2 Setup del solutore... 19
2.1.3 Generazione della mesh... 20
2.1.4 Soluzione del flusso... 25
2.2 Risultati... 27
2.2.1 Profilo n° 1... 28
2.2.2 Profilo n° 4... 31
2.2.3 Profilo n° 8... 34
2.2.4 Profilo n° 13... 37
3. ANALISI DEL VELIVOLO... 40
3.1 Le simulazioni effettuate... 41
3.2 Impostazione della simulazione fluidodinamica... 50
3.2.1 Realizzazione della mesh superficiale... 51
3.2.2 Importazione della mesh superficiale... 58
ii
3.3.1 Set di simulazioni n°1, n°2 e n°3... 74
3.3.2 Simulazione n°4... 84
3.3.3 Simulazione n°5... 88
3.3.4 Simulazione n°6... 93
3.4 Calcolo delle derivate aerodinamiche... 98
3.4.1 Derivate relative al piano longitudinale... 99
3.4.2 Derivate relative al piano latero-direzionale... 101
CONCLUSIONI... 103
iii
caratteristiche di un velivolo a motore con quelle di un aliante puro (ovvero privo di motore). Le due sopraccitate categorie di velivoli rappresentano due modi completamente differenti di volare. Il primo, ovvero quello a motore, viene utilizzato per trasferimenti da un luogo ad un altro utilizzando il motore per tutta la durata del volo. L’aliante, non avendo il motore, può volare solamente sfruttando le correnti ascensionali termiche e dinamiche (volo a vela), presenti naturalmente nell’atmosfera; allo stesso modo di quanto fatto da uccelli veleggiatori come, per esempio, aquile o falchi.
Il motoaliante, unendo le caratteristiche dei due velivoli sopraccitati, ha la capacità di fare sia del volo a motore che del volo a vela.
La categoria dei velivoli ultraleggeri è quella caratterizzata principalmente dal valore del peso massimo al decollo fissato a 450kg. Per questa categoria, le autorità aeronautiche, non richiedono una certificazione del velivolo.
Il presente lavoro si inserisce nel contesto della CFD, acronimo di Computational Fluid Dynamics. Nello specifico, la CFD affronta lo studio dei fenomeni fluidodinamici in modo computazionale con l’ausilio del calcolatore. Essa viene largamente utilizzata da tempo dall’industria e dalla ricerca per tutti quei problemi che coinvolgono l’azione di fluidi e trova nell’aeronautica una delle più interessanti e affascinanti possibilità di applicazione.
Per rappresentare il modello fluidodinamico, la CFD utilizza codici di calcolo basati sulle equazioni di Navier-Stokes, risolte con approcci di diverso tipo legati alla rappresentazione della turbolenza. Il metodo utilizzato nel presente lavoro è quello basato sulle RANS (Reynolds Averaged Navier-Stokes equations) in cui le equazioni di Navier-Stokes vengono, appunto, mediate alla Reynolds ovvero una generica quantità fisica, dipendente dallo spazio e dal tempo, è decomposta nella somma di un valor medio (dipendente dallo spazio) più una fluttuazione (dipendente dallo spazio e
iv
Si osserva come le RANS costituiscano un sistema di equazioni differenziali (o integrali, a seconda della formulazione) non lineari ed alle derivate parziali per cui non è possibile avere, in generale, una soluzione in forma chiusa. Per questo motivo la soluzione deve essere raggiunta per iterazioni successive.
Il pregio più grande della CFD è quello di dare la possibilità di analizzare in modo veloce ed economico una grande quantità di configurazioni, caratteristica questa, molto apprezzata nel mondo dell’industria. I limiti più grandi sono invece, le restrizioni sulle potenze di calcolo, comunque sempre in evoluzione, e la preparazione degli operatori che si trovano a dover settare una quantità molto elevata di parametri ed a valutare i risultati ricchi di informazioni che si ottengono.
Lo svolgimento del presente lavoro di tesi si articolerà in tre fasi principali.
Nella prima si genererà il modello CAD (Computer Aided Design) delle superfici del velivolo utilizzando il software CATIA V5. A tal proposito si osserva che il suddetto modello sarà creato in modo tale da essere facilmente e velocemente modificabile a seconda dei risultati delle varie analisi progettuali. In particolare, per ogni superficie, saranno definite delle “variabili geometriche” dalle quali dipenderà tutta la geometria della superficie in questione. Modificando tali variabili si otterrà, in automatico, la modifica della geometria della superficie considerata.
La seconda fase sarà rivolta alla caratterizzazione aerodinamica dei profili. In particolare, tramite metodologia CFD, utilizzando il software StarCCM+ 8.04, saranno esaminati quattro profili alari e per ognuno di essi saranno ricavati l’andamento, al variare dell’incidenza, del coefficiente di portanza, di resistenza, e di momento.
Nella terza, e ultima, fase si procederà alla caratterizzazione aerodinamica del velivolo. In particolare, tramite metodologia CFD, utilizzando il software StarCCM+ 8.04, si ricaveranno: l’andamento del coefficiente di portanza, di resistenza, e di momento con flap in posizione neutra; il valore del massimo coefficiente di portanza
v
CLδf, CDδf, Cmδf che scaturiscono dalla variazione dell’angolo di rotazione dei flap;
le derivate aerodinamiche Cyδa, Clδa, Cnδa che scaturiscono dalla variazione
1
1. IL MODELLO CAD
Nel presente capitolo vengono illustrati i concetti fondamentali che hanno permesso la realizzazione del modello CAD delle superfici del velivolo mediante il software CATIA V5.
Nel seguito della trattazione, le superfici del velivolo verranno suddivise in superfici portanti e fusoliera. Le superfici portanti inglobano anche le superfici di controllo del velivolo: flaperoni, elevatore e rudder. Si ricorda, che con il termine “flaperone” si indica un alettone che si estende su tutta l’apertura alare e, quindi, ha contemporaneamente la funzione di alettone e di ipersostentatore di bordo d’uscita (flap).
Il modello CAD è stato costruito in modo tale da essere facilmente e velocemente modificabile a seconda dei risultati delle varie analisi progettuali. In particolare, per ogni superficie, sono state definite delle “variabili geometriche” dalle quali dipende tutta la geometria della superficie in questione. Modificando tali variabili si ottiene, in automatico, la modifica della geometria della superficie considerata.
Nella tabella seguente sono riportate alcune delle caratteristiche geometriche principali del velivolo:
Tab. 1.1 Caratteristiche geometriche principali del velivolo.
Parametro Valore Apertura alare 13.40 m Superficie alare 14.3 m2 Allungamento alare 13:1 Corda al root 1.5 m Corda al tip 0.56 m Lunghezza fusoliera 5.8 m
2
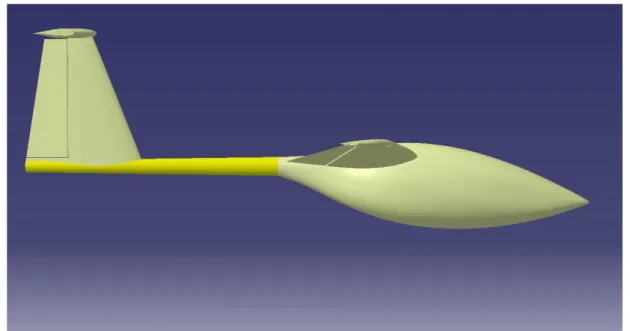
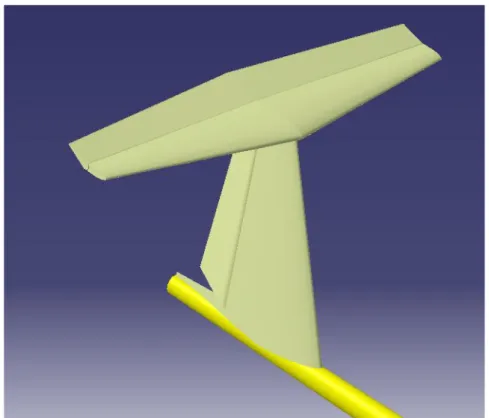
Le seguenti figure illustrano il risultato finale ottenuto. Si precisa che le tip alari riportate nelle figure seguenti hanno solo uno scopo illustrativo. Infatti le simulazioni fluidodinamiche effettuate sono state condotte in assenza di tali tip, ovvero con ala perfettamente trapezia.
3
4
Figura 1.2 Superfici del velivolo.
5
Figura 1.4 Superfici del velivolo.
6
7
1.1 Le superfici portanti
Le superfici portanti sono costituite dall’ala, dalla coda orizzontale e verticale, da tutte le superfici di controllo annesse (flaperoni, elevatore, rudder). Tutte le superfici portanti sono state generate in modo del tutto analogo e quindi, per brevità, nel seguito della trattazione si descriveranno le fasi principali necessarie alla generazione della sola ala.
Tutte le superfici sono state create in ambiente Shape - Generative Shape Design utilizzando il comando Multi-Sections Surface.
Trattando, quindi, la generazione dell’ala, per prima cosa si è proceduto nel definire le seguenti variabili geometriche:
- angolo diedro
- angolo di calettamento ala-fusoliera - forma dei profili
- forma in pianta
Descriviamo la generazione della semiala sinistra; la semiala destra si ottiene per simmetria rispetto al piano longitudinale.
Per prima cosa, come illustrato nella seguente immagine, si è creato il sistema di riferimento di colore nero:
8
Figura 1.7 Generazione dell’ala: creazione dei sistemi di riferimento.
Esso ha l’origine sul piano di simmetria dell’ala e ha l’asse Y giacente sulla semiretta di colore rosso in figura. L’angolo di rotazione di tale sistema, attorno al proprio asse Y, definisce l’angolo di calettamento ala-fusoliera.
L’angolo diedro è controllato per mezzo dell’angolo formato della semiretta di colore rosso e il piano orizzontale come illustrato nella seguente immagine:
9
Figura 1.8 Generazione dell’ala: angolo diedro.
Successivamente sono stati creati i tredici sistemi di riferimento, di colore bianco nella precedente Fig. 1.7, tutti quanti aventi gli assi allineati con quelli del sistema di riferimento di colore nero (Fig. 1.7), sui quali è stato fatto lo sketch dei corrispondenti profili alari.
Come illustrato nella seguente immagine, si procede con il generare i punti caratteristici dei profili (come, ad esempio, il bordo d’attacco e il bordo d’uscita, le flange del longherone alare e del falso longherone, etc. etc.) e successivamente sono state create le rette passanti per tali punti:
10
Figura 1.9 Generazione dell’ala: angolo diedro.
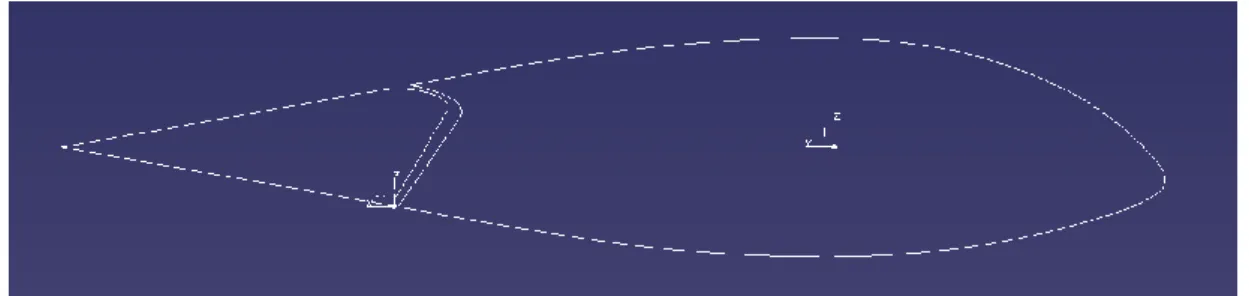
Per quanto riguarda i profili, come illustrato nella seguente immagine, si precisa che ognuno di essi è stato disegnato suddividendolo in due parti: una parte fissa (quella che contiene il bordo d’attacco) e una parte mobile (quella che contiene il bordo d’uscita):
11
Il movimento della parte mobile si ottiene introducendo i due sistemi di riferimento illustrati nella figura successiva (uno mobile rispetto all’altro) e facendo in modo che lo sketch delle due parti del profilo appartenga ai rispettivi sistemi di riferimento:
Figura 1.11 Generazione dei profili alari: movimento della parte mobile.
Infine, la superficie dell’ala, cosi come quella dei flaperoni, si è ottenuta per mezzo del comando Multi-Sections Surface utilizzando come Section i profili alari e come Guides le rette passanti per i punti caratteristici illustrate in figura 1.9.
12
1.2 La fusoliera
La superficie di fusoliera è stata generata in modo analogo a quanto fatto per le superfici portanti. Anche in questo caso si è utilizzato l’ambiente Shape - Generative Shape Design.
Per prima cosa si è proceduto nel definire le variabili geometriche che definiscono la superficie e, come evidente dalla seguente figura, esse sono costituite dalla forma delle ordinate e dalle cinque curve tridimensionali che si sviluppano in senso longitudinale. Tali curve sono state create in ambiente Shape - FreeStyle utilizzando il comando 3D Curve.
13
La superficie di fusoliera si è ottenuta per mezzo del comando Multi-Sections Surface utilizzando come Section i profili delle ordinate e come Guides le cinque curve tridimensionali suddette.
14
2. ANALISI DEI PROFILI ALARI
Nel presente capitolo si procede ad illustrare le fasi fondamentali, e i risultati ottenuti, dell’analisi fluidodinamica effettuata sui profili alari.
Ogni semiala conta tredici profili alari e, come illustrato nella fig. 2.1, sono stati analizzati i profili n°1, n°4, n°8 e n°13.
Figura 2.1 Schema dei profili alari analizzati
Per ogni profilo analizzato sono state ricavate, tramite metodologia CFD, le seguenti tre curve caratteristiche: l’andamento del coefficiente di portanza, e di momento, in funzione dell’incidenza e la polare.
Nel paragrafo 2.1 si illustra come è stata impostata la simulazione fluidodinamica per un profilo generico riportando i risultati, relativi ad ogni profilo, nel paragrafo 2.2.
15
2.1 Impostazione della simulazione fluidodinamica
In questo paragrafo si mettono in luce le principali fasi che sono necessarie per condurre l’analisi CFD dei profili allo scopo di ricavarne le seguenti tre curve caratteristiche: l’andamento del coefficiente di portanza, e di momento, in funzione dell’incidenza e la polare. Il software utilizzato per l’analisi è StarCCM+ 8.04 che si basa sulla risoluzione delle equazioni di Navier-Stokes mediate alla Reynolds (RANS). Il problema fisico matematico viene completato da un modello di turbolenza da scegliere tra quelli disponibili nel software. Si precisa infine che l’analisi viene condotta ipotizzando che il flusso sia bidimensionale, stazionario e completamente turbolento; ovvero non si prende in considerazione la transizione laminare-turbolento dello strato limite.
16
2.1.1 Importazione della geometria e creazione della regione fluida
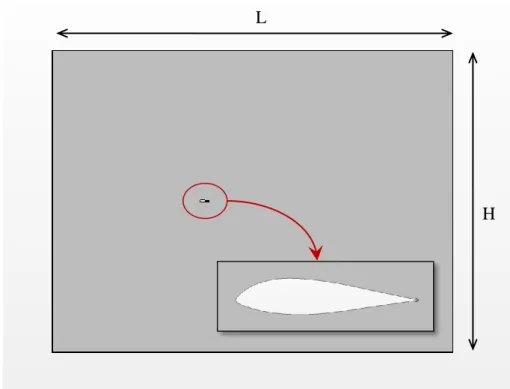
La procedura ha inizio con l’importazione della geometria del profilo e del box che costituisce il dominio di calcolo; entrambe creati all’interno del software CATIA V5.
Figura 2.2 Schema della geometria del box del dominio di calcolo
Come riportato nella seguente tabella, le dimensioni del box sono state create in proporzione alla corda alare del profilo in esame:
L
17
Tab. 2.1 Dimensioni del box del dominio di calcolo.
C Corda del profilo alare in esame
H = 30 C Altezza del box
L = 40 C Lunghezza del box
E’ opportuno precisare che il box deve avere anche una terza dimensione, ovvero quella ortogonale al piano del foglio, ma essa può essere fissata ad arbitrio essendo l’analisi bidimensionale.
Successivamente sono state raggruppate le superfici che hanno la stessa condizione al contorno (o boundary). In definitiva, come illustrato nella seguente figura, si sono ottenute le seguenti tre superfici denominate “ingresso”, “uscita” e “profilo”:
Figura 2.3 Schema della geometria del box del dominio di calcolo
Ingresso
18
Fatto ciò si è assegnato l’intero dominio ad una unica regione di fluido facendo in modo che alle tre diverse superfici, prima individuate, si possano assegnare tre condizioni al contorno differenti.
Di seguito si riportano le condizioni al contorno utilizzate e le rispettive superfici sulle quali vengono imposte:
- Velocity Inlet: condizione al contorno imposta sulla superficie “Ingresso”. - Pressure Outlet: condizione al contorno imposta sulla superficie “Uscita” - Wall: condizione al contorno imposta sulla superficie “Profilo”
19
2.1.2 Setup del solutore
Come già anticipato, si studia un flusso bidimensionale, stazionario e completamente turbolento. Inoltre, essendo la velocità del velivolo molto inferiore a quella del suono (alla quota di volo) è possibile considerare il flusso come incomprimibile. Questo ci permette di risolvere il flusso disaccoppiando le equazioni di bilancio di massa e di quantità di moto dall’equazione di bilancio dell’energia (infatti diventa trascurabile la dipendenza della viscosità cinematica dalla temperatura). Inoltre, nel caso di flusso incomprimibile l’equazione di stato del fluido si traduce nel dire che la densità del fluido è costante in tutto il campo. Infine il modello di turbolenza scelto è il k-ε nella versione Realizable. Quest’ultimo differisce dalla versione standard per avere una diversa formulazione della viscosità turbolenta ed una nuova equazione del rateo di dissipazione ε.
In definitiva, per quanto ora detto, sono stati utilizzati i seguenti modelli (che sono quelli maggiormente utilizzati per simulazioni di questo genere):
- Two Dimensional - Steady - Turbulent - Gas - Segregated Flow - Constant Density - K-Epsilon Turbulence
Tutte le simulazioni sono state effettuate in condizioni di atmosfera standard con i valori di velocità, densità e viscosità dinamica riportati nella seguente tabella:
Tab. 2.2 Velocità, densità e viscosità dinamica del flusso.
Parametro Valore
Velocità 20 m/s
Densità 1,225 kg/m3
20
2.1.3 Generazione della mesh
La mesh superficiale, e quella di volume, sono state generate all’interno del software StarCCM+ 8.04. I modelli utilizzati sono i seguenti:
- Surface Remesher - Prism Layer Mesher - Polyhedral Mesher
Per la mesh superficiale si è utilizzato il modello Surface Remesher che permette di migliorare la triangolazione della superficie di partenza e preparare così la geometria per la successiva mesh di volume. Per quest’ultima vengono selezionati i modelli Polyhedral Mesher e Prism Layer Mesher. Quest’ultimo permette di analizzare meglio lo strato limite alla parete poiché crea elementi a parallelepipedo lungo la parete stessa; ovvero allineati con il vettore velocità alla parete.
Di seguito si riporta una breve descrizione dei parametri i cui valori devono essere adeguatamente impostati per generare la mesh:
- Base size: rappresenta la dimensione caratteristica dell’elemento superficiale, utilizzato di default per la mesh superficiale, ove non vi sia altra specificazione.
- Surface size: tramite i valori di Relative (e Absolute) Target Size, Relative (e Absolute) Minimum Size ci permette di controllare le dimensioni delle celle della mesh di superficie
- Surface Curvature: identifica il numero di punti in cui viene suddivisa una circonferenza di raggio unitario. Il valore scelto deve essere tale da permettere una buona descrizione delle curvature delle superfici.
- Surface Growth Race: definisce il fattore di crescita di una cella superficiale rispetto a quella antecedente.
21
- Tet/Poly Density: regola la costruzione della mesh poliedrica di volume mediante i valori assunti dei parametri Density e Growth Factor. Questi ultimi controllano rispettivamente la densità delle celle poliedriche e la velocità di crescita delle stesse.
- Number of Prism Layer: governa il numero delle celle prismatiche generate in direzione ortogonale alla superficie.
- Prism Layer Stretching: impone il tasso di crescita degli strati successivi delle celle prismatiche allontanandosi dalla parete.
- Prism Layer Thickness: stabilisce lo spessore complessivo di tutti gli strati del Prism Layer
- Tet/Poly Volume Blending: gestisce il passaggio dalla densità di mesh superficiale a quella di volume. Un incremento di questo coefficiente rispetto al suo valore unitario rende più brusca la transizione.
La tabella seguente riporta i valori che sono stati assegnati ai suddetti parametri. Occorre precisare che tali valori sono il risultato di un adeguato studio di sensibilità della soluzione al grado di infittimento della mesh.
22
Tab. 2.3 Valori utilizzati per la generazione della mesh superficiale e volumetrica.
Modello Parametro Valore
Surface Remesher
Base Size 0.15 m
Basic Curvature 100 Pts/Circle
Surface Growth Rate 1.05
Relative Target Size Relative Minimum Size
100 90 Absolute Target Size
Absolute Minimum Size
0.005 m 0.001 m
Prism Layer Mesher
Number of Prism Layer 10
Prism Layer Stretching 1.15
Prism Layer Thickness Si veda quanto specificato sotto
Polyhedral Mesher
Density 1.4
Growth Factor 0.6
Blending Factor 1.0
Il valore del Prism Layer Thickness è stato calcolato utilizzando la formula relativa allo spessore dello strato limite turbolento su lastra piana ad incidenza nulla:
𝛿(𝑥) = 0.37 𝑥 𝑅𝑒(𝑥)0.2
dove:
x : lunghezza della corda del profilo alare in esame
Su “Ingresso” e “Uscita” Su “Profilo”
23
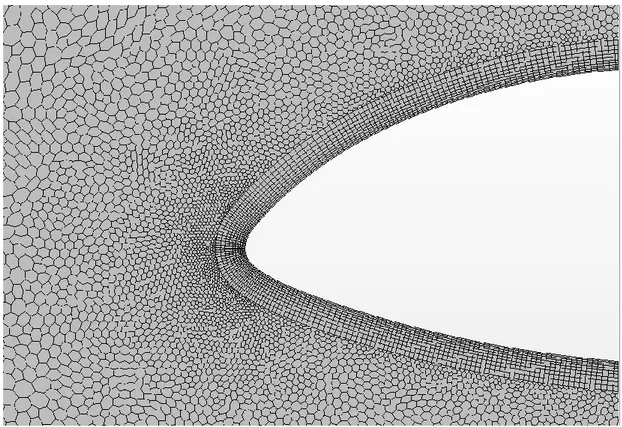
La figura seguente riporta, a titolo di esempio, la mesh di volume ottenuta per il profilo di radice dell’ala:
Figura 2.4 Mesh di volume del profilo di radice dell’ala.
24
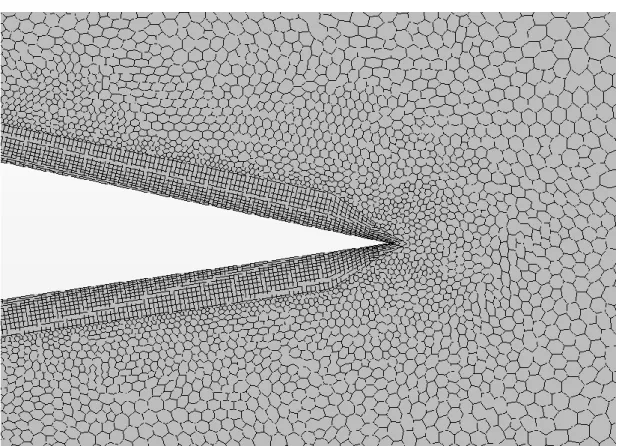
Figura 2.6 Particolare della mesh sul bordo d’uscita del profilo di radice dell’ala.
Nella tabella seguente si riporta, per ognuno dei quattro profili analizzati, il numero di celle di volume che compongono la mesh di volume:
Tab. 2.4 Numero di celle della mesh di volume.
Profilo n° Numero di celle
1 212372
4 165481
8 107830
25
2.1.4 Soluzione del flusso
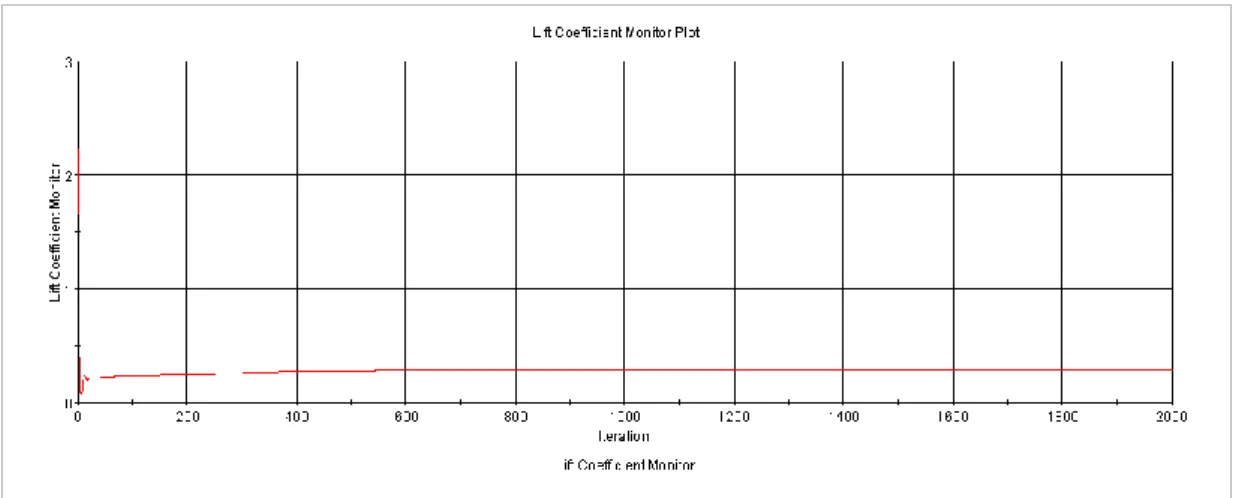
Come criterio per terminare una simulazione, si stabilisce un numero massimo di iterazioni pari a 2000. Nelle figure seguenti si riporta l’andamento, in funzione del numero di iterazioni, dei residui, del coefficiente di portanza, e di resistenza, per una configurazione di riferimento. Da tali andamenti si osserva come il numero massimo di iterazioni scelto garantisce una sufficiente sicurezza circa la convergenza della soluzione.
26
Figura 2.8 Andamento del coefficiente di portanza in funzione del numero di iterazioni.
Figura 2.9 Andamento del coefficiente di resistenza in funzione del numero di iterazioni.
Per le simulazioni è stato utilizzato un computer avente le seguenti caratteristiche:
Tab. 2.5 Caratteristiche dell’hardware utilizzato.
Parametro Valore
Numero CPU 4
Clock CPU 2.2 GHz
27
2.2 Risultati
In questo paragrafo si mettono in luce i risultati ottenuti dall’analisi CFD condotta sui profili.
In particolare, per i quattro profili esaminati, si riporta l’andamento del coefficiente di portanza, e di momento (rispetto al centro aerodinamico), al variare dell’incidenza e la polare. Inoltre, si riporta anche uno schema della geometria del profilo in esame con le relative caratteristiche geometriche principali.
28
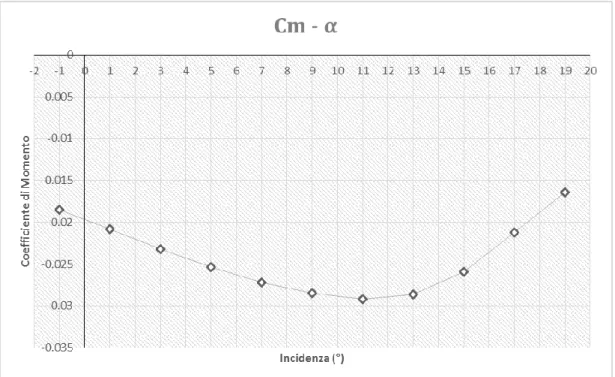
2.2.1 Profilo n° 1
Il profilo alare n° 1 ha la seguente geometria:
Figura 2.10 Profilo alare n°1.
Esso ha le seguenti caratteristiche principali:
Tab. 2.6 Caratteristiche geometriche profilo n°1.
Parametro Valore
Corda 1.5 m
Spessore percentuale 19%
La simulazione è stata condotta per il seguente valore del numero di Reynolds:
Tab. 2.7 Numero di Reynolds.
Parametro Valore
Reynolds 2,053 x 106
29
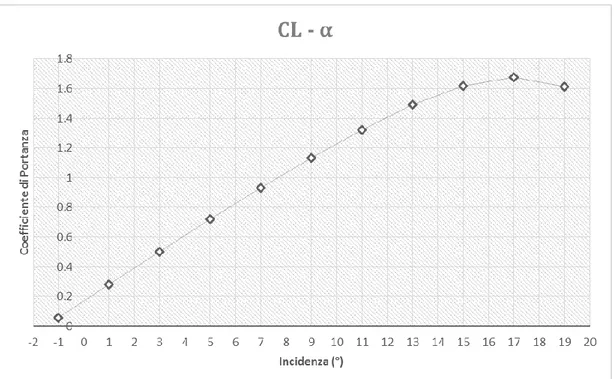
Tab. 2.8 Risultati dell’analisi relativa al profilo n°1.
α (deg) CL CD Cm E -1 0.059 0.012 -0.018 5 1 0.281 0.012 -0.021 23 3 0.502 0.013 -0.023 38 5 0.719 0.014 -0.025 50 7 0.930 0.016 -0.027 57 9 1.132 0.019 -0.028 60 11 1.323 0.022 -0.029 59 13 1.490 0.027 -0.029 55 15 1.619 0.034 -0.026 47 17 1.677 0.045 -0.021 37 19 1.612 0.066 -0.016 25
30
Figura 2.12 Andamento del coefficiente di momento in funzione dell’incidenza.
31
2.2.2 Profilo n° 4
Il profilo alare n° 4 ha la seguente geometria:
Figura 2.14 Profilo alare n°4.
Esso ha le seguenti caratteristiche principali:
Tab. 2.9 Caratteristiche geometriche profilo n°4.
Parametro Valore
Corda 1.3 m
Spessore percentuale 19%
La simulazione è stata condotta per il seguente valore del numero di Reynolds:
Tab. 2.10 Numero di Reynolds.
Parametro Valore
Reynolds 1,766 x 106
32
Tab. 2.11 Risultati dell’analisi relativa al profilo n°4.
α (deg) CL CD Cm E -1 0.070 0.012 -0.018 6 1 0.290 0.013 -0.021 23 3 0.508 0.013 -0.023 38 5 0.722 0.015 -0.025 50 7 0.929 0.017 -0.027 56 9 1.128 0.019 -0.028 59 11 1.313 0.023 -0.029 58 13 1.478 0.028 -0.029 53 15 1.602 0.035 -0.026 45 17 1.670 0.045 -0.021 37 19 1.610 0.065 -0.016 25
33
Figura 2.16 Andamento del coefficiente di momento in funzione dell’incidenza.
34
2.2.3 Profilo n° 8
Il profilo alare n° 8 ha la seguente geometria:
Figura 2.18 Profilo alare n°8.
Esso ha le seguenti caratteristiche principali:
Tab. 2.12 Caratteristiche geometriche profilo n°8.
Parametro Valore
Corda 0.97 m
Spessore percentuale 18%
La simulazione è stata condotta per il seguente valore del numero di Reynolds:
Tab. 2.13 Numero di Reynolds.
Parametro Valore
Reynolds 1,320 x 106
35
Tab. 2.14 Risultati dell’analisi relativa al profilo n°8.
α (deg) CL CD Cm E -1 0.092 0.012 -0.028 7 1 0.311 0.013 -0.028 24 3 0.529 0.014 -0.029 39 5 0.743 0.015 -0.029 50 7 0.952 0.017 -0.029 56 9 1.150 0.020 -0.028 58 11 1.338 0.024 -0.027 57 13 1.503 0.029 -0.026 52 15 1.629 0.037 -0.023 44 17 1.683 0.049 -0.019 34 19 1.615 0.070 -0.016 23
36
Figura 2.20 Andamento del coefficiente di momento in funzione dell’incidenza.
37
2.2.4 Profilo n° 13
Il profilo alare n° 13 ha la seguente geometria:
Figura 2.22 Profilo alare n°13.
Esso ha le seguenti caratteristiche principali:
Tab. 2.15 Caratteristiche geometriche profilo n°13.
Parametro Valore
Corda 0.56 m
Spessore percentuale 14%
La simulazione è stata condotta per il seguente valore del numero di Reynolds:
Tab. 2.16 Numero di Reynolds.
Parametro Valore
Reynolds 7,700 x 105
38
Tab. 2.17 Risultati dell’analisi relativa al profilo n°13.
α (deg) CL CD Cm E -1 0.161 0.013 -0.048 12 1 0.387 0.013 -0.047 29 3 0.611 0.014 -0.047 42 5 0.831 0.016 -0.046 52 7 1.046 0.018 -0.045 57 9 1.251 0.022 -0.044 58 11 1.442 0.026 -0.042 55 13 1.609 0.033 -0.040 49 15 1.733 0.042 -0.037 41 17 1.753 0.060 -0.033 29 19 1.730 0.090 -0.033 19
39
Figura 2.24 Andamento del coefficiente di momento in funzione dell’incidenza.
40
3. ANALISI DEL VELIVOLO
Nel presente capitolo si procede ad illustrare le fasi fondamentali, e i risultati ottenuti, dell’analisi fluidodinamica effettuata sull’intero velivolo.
In particolare, nel paragrafo 3.1 si descrivono le simulazioni che sono state effettuate riportando le grandezze di interesse che si vogliono calcolare. Nel paragrafo 3.2 si mettono in luce le principali fasi che sono necessarie per condurre una generica simulazione tra quelle effettuate. Nel paragrafo 3.3 si riportano i risultati ottenuti per le simulazioni condotte. Infine, nel paragrafo 3.4 si riportano i valori delle derivate aerodinamiche calcolate.
41
3.1 Le simulazioni effettuate
Di seguito si elencano le simulazioni che sono state effettuate e, per ognuna di esse, viene data una breve descrizione degli obiettivi che si intendono raggiungere.
Si è utilizzata la seguente simbologia:
Tab. 3.1 Definizione degli angoli caratteristici. δa Angolo di rotazione degli alettoni
δf Angolo di rotazione dei flap
δr Angolo di rotazione del rudder
δe Angolo di rotazione dell’equilibratore
β Angolo di imbardata
α Angolo di incidenza
Le definizioni dei suddetti angoli, e dei loro versi postivi, seguono le convenzioni usualmente adottate in meccanica del volo. In particolare, facendo riferimento alle figure seguenti, si ricorda che:
- l’angolo di incidenza α è definito come l’angolo formato dalla proiezione della velocità di volo nel piano di simmetria del velivolo e l’asse corpo X (fig. 3.1), con verso positivo pari a quello naturale sul piano XZ (da Z a X). - l’angolo di imbardata β è definito come l’angolo formato dalla velocità di
volo ed il piano di simmetria XZ del velivolo, con verso positivo in direzione della semiala destra (figura 3.3).
- l’angolo di rotazione degli alettoni δa, come illustrato in figura 3.4, è dato
dalla media della rotazione angolare dell’alettone destro e dell’alettone sinistro. Un valore positivo di δa genera un momento di rollio negativo e
42
Figura 3.1 Assi corpo del velivolo, vista laterale.
43
Figura 3.3 Verso positivo dell’angolo di imbardata β.
β
Y
X
44
Figura 3.4 Definizione dell’angolo di rotazione degli alettoni δa.
Y
X
Sez B-B
Sez A-A
45
Di seguito si elencano le simulazioni che sono state effettuate.
Si ricorda che il velivolo è dotato di alettoni che si estendono su tutta l’apertura alare. Tali superfici mobili vengono utilizzate, nel velivolo in esame, anche come flap (ipersostentatori di bordo d’uscita). Il verso positivo di rotazione dei flap è coincidente con quello relativo agli alettoni illustrato in fig. 3.4.
Set di simulazioni n°1
Tab. 3.2 Set di simulazioni n°1: valori degli angoli caratteristici.
δa δf δr δe β α
0° 0° 0° 0° 0° Variabile
Lo scopo di questo set di simulazioni è quello di ricavare l’andamento del coefficiente di portanza, e di momento (in beccheggio), in funzione dell’incidenza e la polare. Tutte le superfici mobili sono in posizione neutra. L’incidenza viene fatta variare dal valore di -5° fino a 21° con passo di 2°.
Set di simulazioni n°2
Tab. 3.3 Set di simulazioni n°2: valori degli angoli caratteristici.
δa δf δr δe β α
0° +5° 0° 0° 0° Variabile
Lo scopo di questo set di simulazioni è quello di ricavare l’andamento del coefficiente di portanza, e di momento (in beccheggio), in funzione dell’incidenza e la polare. I flap vengono deflessi di +5°. L’incidenza viene fatta variare dal valore di 10° fino a 16° con passo di 2°.
46 Set di simulazioni n°3
Tab. 3.4 Set di simulazioni n°3: valori degli angoli caratteristici.
δa δf δr δe β α
0° +16° 0° 0° 0° Variabile
Lo scopo di questo set di simulazioni è quello di ricavare l’andamento del coefficiente di portanza, e di momento (in beccheggio), in funzione dell’incidenza e la polare. I flap vengono deflessi di +16° che corrisponde alla massima estensione (o full). L’incidenza viene fatta variare dal valore di 10° fino a 16° con passo di 2°.
Simulazione n°4
Tab. 3.5 Simulazione n°4: valori degli angoli caratteristici.
δa δf δr δe β α
0° -5° 0° 0° 0° αcr
Lo scopo di questa simulazione è quello di ricavare il valore del coefficiente di portanza, del coefficiente di resistenza e di momento di beccheggio (attorno al baricentro). I flap vengono deflessi di -5°. L’ angolo di incidenza è mantenuto costante e pari al valore di crociera: αcr = 2°.
47 Simulazione n°5
Tab. 3.6 Simulazione n°5: valori degli angoli caratteristici.
δa δf δr δe β α
0° 0° 0° 0° +2° αcr
Lo scopo di questa simulazione è quello di ricavare il comportamento in imbardata del velivolo. In particolare si vogliono determinare le derivate aerodinamiche Clβ, Cnβ e Cyβ. L’angolo di incidenza è mantenuto costante e pari al valore di crociera: αcr = 2°.
Simulazione n°6
Tab. 3.7 Simulazione n°6: valori degli angoli caratteristici.
δa δf δr δe β α
+5° 0° 0° 0° 0° αcr
Lo scopo di questa simulazione è quello di ricavare il comportamento in rollio del velivolo. In particolare si vogliono determinare le derivate aerodinamiche Clδa, Cnδa e Cyδa. Gli alettoni vengono deflessi in modo
antisimmetrico di 5° a partire dalla condizione di neutro. L’angolo di incidenza è mantenuto costante e pari al valore di crociera: αcr = 2°.
48
Tutte le suddette simulazioni sono state effettuate in condizioni di atmosfera standard con i valori di velocità, densità e viscosità dinamica riportati nella seguente tabella:
Tab. 3.8 Parametri caratteristici del flusso analizzato.
Parametro Valore
Velocità 20 m/s
Densità 1,225 kg/m3
Viscosità Dinamica 1,79 x 10-5 Pa-s
Le derivate aerodinamiche sono state calcolate rispetto agli assi stabilità illustrati nella figura seguente. A tal proposito, quale condizione iniziale di riferimento, necessaria per definire gli assi stabilità, si è considerata la situazione di flusso avente angolo di imbardata β nullo e angolo di incidenza α pari a αcr = 2°.
Il polo per il calcolo dei momenti è il baricentro.
49
Figura 3.6 Assi stabilità del velivolo, vista dall’alto.
Nel paragrafo 3.2 si illustra come sono state impostate le suddette simulazioni fluidodinamiche riportando i risultati nel paragrafo 3.3.
50
3.2 Impostazione della simulazione fluidodinamica
In questo paragrafo si mettono in luce le principali fasi che sono necessarie per condurre una generica simulazione fluidodinamica tra quelle sopra riportate.
Il software utilizzato per l’analisi è StarCCM+ 8.04 il quale si basa sulla risoluzione delle equazioni di Navier-Stokes mediate alla Reynolds (RANS). Il problema fisico matematico viene completato da un modello di turbolenza da scegliere tra quelli disponibili nel software. Si precisa infine che l’analisi viene condotta ipotizzando che il flusso sia tridimensionale, stazionario e completamente turbolento; ovvero non si prende in considerazione la transizione laminare-turbolento dello strato limite.
51
3.2.1 Realizzazione della mesh superficiale
Allo scopo di realizzare la mesh superficiale, il modello CAD delle superfici dell’intero velivolo è stato importato, in formato IGES, all’interno del software ANSA v. 13.1.2 e successivamente processato.
Dopo aver rimosso alcune imperfezioni nella geometria, le varie superfici del velivolo (come ala, fusoliera, etc.) sono state assegnate ai corrispondenti PID come illustrato nella seguente immagine:
52
Successivamente, tramite l’algoritmo denominato CFD sono stati creati gli elementi triangolari che costituiscono la mesh superficiale. Essa è gestita principalmente dai seguenti parametri:
- Minimum Lenght: dimensione minima del cateto dell’elemento triangolare - Maximum Lenght: dimensione massima del cateto dell’elemento triangolare
Interior Growth Rate: fattore di crescita degli elementi - Skewness: distorsione rispetto al triangolo equilatero
Si è scelto di utilizzare i seguenti valori dei suddetti parametri:
Tab. 3.9 Valori utilizzati per la mesh superficiale.
Parametro Valore
Minimum Lenght 4 mm
Maximum Lenght 45 mm
Interior Growth Rate 1.1
Skewness 0.8
Gli elementi triangolari devono avere una dimensione diversa tra di loro in modo da poter rappresentare adeguatamente le diverse curvature delle superfici del velivolo. Di seguito si riportano alcune immagini che illustrano il risultato ottenuto.
53
Figura 3.8 Dettaglio della mesh di superficie: la fusoliera.
54
Figura 3.10 Dettaglio della mesh di superficie: profilo alare alla tip.
55
56
Successivamente, come illustrato nella seguente figura, si sono create le superfici esterne del dominio di calcolo.
Figura 3.13 Dimensioni del dominio di calcolo.
Le dimensioni del dominio di calcolo utilizzato sono le seguenti:
Tab. 3.10 Dimensioni del dominio di calcolo.
Dimensione Valore
W 160 m
H 80 m
L 120 m
Piu precisamente la superficie di ingresso è stata posta a 40m dalla prua del velivolo.
W
H
57
A tali superfici sono stati assegnati due diversi PID denominati “Ingresso” ed “Uscita”.
Per quanto riguarda la mesh sulle superfici del dominio si è utilizzato ancora l’algoritmo denominato CFD ed elementi triangolari; inoltre si è scelto di utilizzare i seguenti valori dei parametri caratteristici:
Tab. 3.11 Valori utilizzati per la mesh superficiale.
Parametro Valore
Minimum Lenght 3500 mm
Maximum Lenght 3550 mm
Interior Growth Rate 1.1
58
3.2.2 Importazione della mesh superficiale
Una volta creata la mesh superficiale, essa viene importata all’interno del software StarCCM+ 8.04 e vengono generati i seguenti cinque Parts:
Figura 3.14 Generazione dei Parts.
Il Part denominato “Corpo Velivolo” è costituito, come illustrato nella seguente immagine, dall’unione di tutte le superfici fisse del velivolo (e dalle superfici che delimitano il dominio di calcolo): fusoliera, ala, trave di coda, fin, stabilizzatore:
59
Figura 3.15 Generazione dei Parts: Corpo Velivolo.
I Part denominati “Elevatore”, “Flap DX”, “Flap SX”, “Rudder”, sono quelli che rappresentano le superfici di controllo del velivolo:
60
Questi ultimi possono essere ruotati attorno ad assi di sistemi di riferimento, preventivamente creati, così da poter simulare il movimento delle superfici di controllo del velivolo direttamente all’interno del software StarCCM+ 8.04.
Fatto ciò si assegnano tutti i Part suddetti ad una unica regione di fluido e si assegnano le condizioni al contorno alle superfici.
Di seguito si riportano le condizioni al contorno utilizzate e le rispettive superfici sulle quali vengono imposte:
- Velocity Inlet: condizione al contorno imposta sulla superficie “Ingresso”. - Pressure Outlet: condizione al contorno imposta sulla superficie “Uscita” - Wall: condizione al contorno imposta su tutte le superfici rimanenti (ovvero
61
3.2.3 Generazione della mesh di volume
Ognuna delle sei simulazioni effettuate prevede una posizione diversa delle superfici di controllo e, quindi, è necessario generare una mesh di volume diversa per ogni caso. Tutte le mesh sono state create utilizzando i seguenti modelli:
- Prism Layer Mesher - Polyhedral Mesher
Inoltre sono stati scelti i seguenti valori dei parametri:
Tab. 3.12 Valori utilizzati per la generazione della mesh di volume.
Modello Parametro Valore
Prism Layer Mesher
Gap Fill Percentage 0.1
Minimum Thickness Percent 10
Number of Prism Layer 10
Prism Layer Stretching 1.15
Prism Layer Thickness 0.03 m
Polyhedral Mesher
Density 0.9
Growth Factor 1.1
Blending Factor 1.0
I parametri rimanenti sono stati lasciati invariati rispetto alle impostazioni di default. Le mesh di volume così ottenute contengono, ognuna, circa 30 milioni di celle. Le seguenti immagini illustrano il risultato ottenuto.
62
Figura 3.17 Mesh volumetrica, particolare della fusoliera.
63
Figura 3.19 Mesh volumetrica, intersezione ala-fusoliera.
64
Figura 3.21 Mesh volumetrica, intersezione coda orizzontale-coda verticale.
65
Figura 3.23 Mesh volumetrica, piano longitudinale del velivolo.
66
Figura 3.25 Mesh volumetrica sul piano longitudinale del velivolo: coda.
67
Figura 3.27 Mesh volumetrica: sezione alare posta a 0.5 m dal piano longitudinale.
68
69
3.2.4 Setup del solutore
In analogia a quanto fatto per l’analisi dei profili, sono stati utilizzati i seguenti modelli (che sono quelli maggiormente utilizzati per simulazioni di questo genere):
- Three Dimensional - Steady - Turbulent - Gas - Segregated Flow - Constant Density - K-Epsilon Turbulence
Tutte le suddette simulazioni sono state effettuate in condizioni di atmosfera standard con i valori di velocità, densità e viscosità dinamica riportati nella seguente tabella:
Tab. 3.13 Parametri caratteristici del flusso analizzato.
Parametro Valore
Velocità 20 m/s
Densità 1,225 kg/m3
70
3.2.5 Soluzione del flusso
Come criterio per terminare una simulazione si è stabilito un numero massimo di iterazioni pari a 2000. Nelle figure seguenti si riporta l’andamento, in funzione del numero di iterazioni, dei residui, del coefficiente di portanza, e di resistenza, per una configurazione di riferimento. Da tali andamenti si osserva come il numero massimo di iterazioni scelto garantisce una sufficiente sicurezza circa la convergenza della soluzione.
71
Figura 3.31 Andamento del coefficiente di portanza in funzione del numero di iterazioni.
72
Per le simulazioni è stato utilizzato un cluster con 128 processori. Ogni simulazione ha avuto la durata di 6 ore.
73
3.3 Risultati
In questo paragrafo si riportano i risultati delle simulazioni effettuate. Per la descrizione delle simulazioni, e per la simbologia utilizzata, si rimanda ai paragrafi precedenti.
Nel seguito si fa riferimento a coefficienti di forza e di momento. Il generico coefficiente di forza CF, e il generico coefficiente di momento CM, sono
rispettivamente dati dalle seguenti espressioni:
𝐶𝐹 = 𝐹 ½𝜌𝑆𝑉2 𝐶𝑀 = 𝑀 ½𝜌𝑆𝑉2 𝑐̅ dove: - F: generica forza - M: generico momento - ρ: densità - S: superficie alare - V: velocità
74
3.3.1 Set di simulazioni n°1, n°2, n°3
Nelle tabelle seguenti si riportano i risultati relativi ai set di simulazioni n°1, n°2 e n°3.
In particolare, si riportano le seguenti grandezze:
- CL: coefficiente di portanza
- CD: coefficiente di resistenza
- Cm: coefficiente di momento di beccheggio rispetto al baricentro del velivolo
- E: efficienza
Tab. 3.15 Set di simulazioni n°1: risultati.
α (deg) CL CD Cm E -5 -0.196 0.022 0.079 9 -3 -0.005 0.020 0.053 0 -1 0.188 0.021 0.023 9 1 0.381 0.024 -0.010 16 3 0.573 0.030 -0.045 19 5 0.763 0.038 -0.082 20 7 0.948 0.049 -0.122 19 9 1.126 0.063 -0.165 18 11 1.293 0.079 -0.209 16 13 1.440 0.097 -0.253 15 15 1.519 0.115 -0.298 13 17 1.485 0.136 -0.336 11 19 1.377 0.169 -0.358 8 21 1.274 0.203 -0.367 6
75
Tab. 3.16 Set di simulazioni n°2: risultati.
α (deg) CL CD Cm E
10 1.438 0.092 -0.209 16
12 1.573 0.110 -0.252 14
14 1.670 0.127 -0.294 13
16 1.654 0.146 -0.336 11
Tab. 3.17 Set di simulazioni n°3: risultati.
α (deg) CL CD Cm E
10 1.747 0.139 -0.233 13
12 1.867 0.156 -0.273 12
14 1.959 0.175 -0.314 11
16 1.865 0.199 -0.350 9
Nelle seguenti figure si riportano, sotto forma di grafici, i risultati riportati nelle tabelle precedenti.
76
77
78
Figura 3.35 Andamento del coefficiente di momento in funzione dell’incidenza.
Nelle seguenti immagini, in relazione al set di simulazioni n°1, si riporta l’andamento del coefficiente di pressione per α = 3° e α = 15° (incidenza di stallo).
79
Figura 3.36 Andamento del coefficiente di pressione, α =3°.
80
Figura 3.38 Andamento del coefficiente di pressione, α =3°.
81
Figura 3.40 Andamento del coefficiente di pressione, α =3°.
82
Figura 3.42 Andamento del coefficiente di pressione, α =15°.
83
Figura 3.44 Andamento del coefficiente di pressione, α =15°.
84
3.3.2 Simulazione n°4
Nella tabella seguente si riportano i risultati relativi alla simulazione n°4. In particolare, si riportano le seguenti grandezze:
- CL: coefficiente di portanza
- CD: coefficiente di resistenza
- Cm: coefficiente di momento di beccheggio rispetto al baricentro del velivolo
- E: efficienza
Tab. 3.18 Simulazione n°4: risultati.
α (deg) CL CD Cm E
2 0.232 0.021 -0.008 11
Nelle seguenti immagini si riporta l’andamento del coefficiente di pressione sull’intero velivolo.
85
Figura 3.46 Andamento del coefficiente di pressione, α =2°.
86
Figura 3.48 Andamento del coefficiente di pressione, α =2°.
87
88
3.3.3 Simulazione n°5
Nella tabella seguente si riportano i risultati relativi alla simulazione n°5. In particolare, si riportano le seguenti grandezze:
- Cy: coefficiente di forza in direzione dell’asse Y stabilità - Cl: coefficiente di momento attorno all’asse X stabilità - Cn: coefficiente di momento attorno all’asse Z stabilità
Tab. 3.19 Simulazione n°5: risultati.
Cy Cl Cn
-0.009 -0.017 0.036
Nelle seguenti immagini si riporta l’andamento del coefficiente di pressione sull’intero velivolo.
89
Figura 3.51 Andamento del coefficiente di pressione, α =2°, β=2°.
90
Figura 3.53 Andamento del coefficiente di pressione, α =2°, β=2°.
91
Figura 3.55 Andamento del coefficiente di pressione, α =2°, β=2°.
92
Figura 3.57 Andamento del coefficiente di pressione, α =2°, β=2°.
93
3.3.4 Simulazione n°6
Nella tabella seguente si riportano i risultati relativi alla simulazione n°6. In particolare, si riportano le seguenti grandezze:
- Cy: coefficiente di forza in direzione dell’asse Y stabilità - Cl: coefficiente di momento attorno all’asse X stabilità - Cn: coefficiente di momento attorno all’asse Z stabilità
Tab. 3.20 Simulazione n°6: risultati.
Cy Cl Cn
0.009 -0.569 -0.029
Nelle seguenti immagini si riporta l’andamento del coefficiente di pressione sull’intero velivolo.
94
Figura 3.59 Andamento del coefficiente di pressione, α =2°, δa=5°.
95
Figura 3.61 Andamento del coefficiente di pressione, α =2°, δa=5°.
96
Figura 3.63 Andamento del coefficiente di pressione, α =2°, δa=5°.
97
Figura 3.65 Andamento del coefficiente di pressione, α =2°, δa=5°.
98
3.4 Calcolo delle derivate aerodinamiche
Nel presente paragrafo, utilizzando i risultati riportati nel paragrafo 3.3, sono stati calcolati i valori di alcune delle principali derivate aerodinamiche.
Nel seguito si distinguono le derivate relative al piano longitudinale da quelle relative al piano latero-direzionale.
99
3.4.1 Derivate relative al piano longitudinale
E’ stata utilizzata la seguente simbologia:
- CLα: variazione del coefficiente di forza CL dovuto ad una variazione unitaria dell’angolo di incidenza α espresso in radianti
- Cmα: variazione del coefficiente di momento Cm dovuto ad una variazione unitaria dell’angolo di incidenza α espresso in radianti
- CLδf: variazione del coefficiente di forza CL dovuto ad una variazione
unitaria dell’angolo di deflessione dei flap δf espresso in radianti
- CDδf: variazione del coefficiente di forza CD dovuto ad una variazione
unitaria dell’angolo di deflessione dei flap δf espresso in radianti
- Cmδf: variazione del coefficiente di momento Cm dovuto ad una variazione
unitaria dell’angolo di deflessione dei flap δf espresso in radianti
La generica derivata CXα, che scaturisce dalla variazione dell’angolo di incidenza α, è stata calcolata per mezzo della seguente formula:
𝐶𝑋𝛼 = 𝐶𝑋𝛼2− 𝐶𝑋𝛼1 𝛥𝛼 dove: 𝛥𝛼 = 𝛼2 − 𝛼1 𝛼2 = 3° :angolo di incidenza 𝛼1 = 1° :angolo di incidenza
𝐶𝑋𝛼2 :generico coefficiente di forza, o di momento, valutato per 𝛼 = 𝛼2 𝐶𝑋𝛼1 :generico coefficiente di forza, o di momento, valutato per 𝛼 = 𝛼1
100
La generica derivata CXδf, che scaturisce dalla variazione dell’angolo di deflessione
dei flap δf, è stata calcolata per mezzo della seguente formula:
𝐶𝑋𝛿𝑓 =𝐶𝑋δf2− 𝐶𝑋δf1 𝛥δf dove:
𝛥δf = δf2 − δf1
δf2 = 0° :angolo di deflessione dei flap δf1 = −5° :angolo di deflessione dei flap
𝐶𝑋δf2 :generico coefficiente di forza, o di momento, valutato per δf = δf2 𝐶𝑋δf1 : generico coefficiente di forza, o di momento, valutato per δf = δf1
I coefficienti di forza, o di momento, 𝐶𝑋δf2 e 𝐶𝑋δf1 sono valutati per un angolo di incidenza, α, di riferimento pari a 2°.
Nella tabella seguente si riportano i valori delle derivate aerodinamiche suddette:
Tab. 3.21 Derivate: angolo di incidenza.
CLα Cmα
5.51 -1.01
Tab. 3.22 Derivate: angolo deflessione flap.
CLδf CDδf Cmδf
101
3.4.2 Derivate relative al piano latero-direzionale
E’ stata utilizzata la seguente simbologia:
- Cyβ: variazione del coefficiente di forza Cy dovuto ad una variazione unitaria dell’angolo di imbardata β espresso in radianti
- Clβ: variazione del coefficiente di momento Cl dovuto ad una variazione unitaria dell’angolo di imbardata β espresso in radianti
- Cnβ: variazione del coefficiente di momento Cn dovuto ad una variazione unitaria dell’angolo di imbardata β espresso in radianti
- Cyδa: variazione del coefficiente di forza Cy dovuto ad una variazione
unitaria dell’angolo di deflessione degli alettoni δa espresso in radianti
- Clδa: variazione del coefficiente di momento Cl dovuto ad una variazione
unitaria dell’angolo di deflessione degli alettoni δa espresso in radianti
- Cnδa: variazione del coefficiente di momento Cn dovuto ad una variazione
unitaria dell’angolo di deflessione degli alettoni δa espresso in radianti
La generica derivata CXβ, che scaturisce dalla variazione dell’angolo di imbardata β, è stata calcolata per mezzo della seguente formula:
𝐶𝑋𝛽 =𝐶𝑋𝛽2− 𝐶𝑋𝛽1 𝛥𝛽 dove: 𝛥𝛽 = 𝛽2 − 𝛽1 𝛽2 = 2° :angolo di imbardata β 𝛽1 = 0° :angolo di imbardata β
𝐶𝑋𝛽2 : generico coefficiente di forza, o di momento, valutato per 𝛽 = 𝛽2
102
I coefficienti di forza, o di momento, 𝐶𝑋𝛽2 e 𝐶𝑋𝛽2 sono valutati per un angolo di incidenza, α, di riferimento pari a 2°.
La generica derivata CXδa, che scaturisce dalla variazione dell’angolo di deflessione
degli alettoni δa, è stata calcolata per mezzo della seguente formula:
𝐶𝑋δa =
𝐶𝑋δa2− 𝐶𝑋δa1 𝛥δa dove:
𝛥δa = δa2 − δa1
δa2 = 5° :angolo di deflessione degli alettoni δa1 = 0° :angolo di deflessione degli alettoni
𝐶𝑋δa2 : generico coefficiente di forza, o di momento, valutato per δa = δa2 𝐶𝑋δa1 : generico coefficiente di forza, o di momento, valutato per δa = δa1
I coefficienti di forza, o di momento, 𝐶𝑋δa2 e 𝐶𝑋δa2 sono valutati per un angolo di incidenza, α, di riferimento pari a 2°.
Nelle tabelle seguenti, si riportano i valori delle derivate aerodinamiche suddette:
Tab. 3.23 Derivate: angolo di imbardata.
Cyβ Clβ Cnβ
-0.27 -0.48 1.04
Tab. 3.24 Derivate: angolo deflessione alettoni.
Cyδa Clδa Cnδa
103
CONCLUSIONI
Il presente elaborato costituisce il risultato del lavoro di tesi svolto, avente per oggetto la caratterizzazione aerodinamica di un velivolo ultraleggero mediante metodologia CFD (Computational Fluid Dynamics).
Lo svolgimento del lavoro di tesi si è articolato in tre fasi principali.
Nella prima, utilizzando il software CATIA V5, si è generato il modello CAD (Computer Aided Design) delle superfici del velivolo. A tal proposito, si osserva che è stato creato un modello parametrico facilmente e velocemente modificabile a seconda dei risultati delle varie analisi progettuali. In particolare, per ogni superficie, sono state definite delle “variabili geometriche” dalle quali dipende tutta la geometria della superficie in questione. Modificando tali variabili si ottiene, in automatico, la modifica della geometria della superficie considerata.
La seconda fase è stata rivolta alla caratterizzazione aerodinamica dei profili. In particolare, tramite metodologia CFD, utilizzando il software StarCCM+ 8.04, sono stati esaminati quattro profili alari e per ognuno di essi è stato ricavato l’andamento, al variare dell’incidenza, del coefficiente di portanza, di resistenza, e di momento. Nella terza, e ultima, fase si è proceduto alla caratterizzazione aerodinamica del velivolo. In particolare, tramite metodologia CFD, utilizzando il software StarCCM+ 8.04, è stato ricavato: l’andamento del coefficiente di portanza, di resistenza, e di momento con flap in posizione neutra; il valore del massimo coefficiente di portanza con flap estratti a +5° e +16°; le derivate aerodinamiche CLα e Cmα che scaturiscono dalla variazione dell’angolo di incidenza; le derivate aerodinamiche Cyβ, Clβ, Cnβ che scaturiscono dalla variazione dell’angolo di imbardata; le derivate aerodinamiche CLδf, CDδf, Cmδf che scaturiscono dalla variazione dell’angolo di rotazione dei flap;
le derivate aerodinamiche Cyδa, Clδa, Cnδa che scaturiscono dalla variazione
dell’angolo di rotazione degli alettoni. Si rendono necessarie alcune precisazioni.
104
In primo luogo, l’analisi fluidodinamica relativa ai profili alari e all’intero velivolo, è stata condotta sotto l’ipotesi di flusso completamente turbolento; ovvero non si è presa in considerazione la transizione laminare-turbolento dello strato limite. Sebbene questo possa sembrare una forzatura brutale della realtà, va comunque tenuto di conto che l’obiettivo del presente lavoro è quello di effettuare una valutazione preliminare delle prestazioni del velivolo.
In secondo luogo, non sono state valutate né le derivate aerodinamiche che scaturiscono dalla variazione dell’angolo di rotazione dell’equilibratore e del rudder, né le derivate aerodinamiche che scaturiscono dalle velocità angolari in beccheggio, in rollio, e in imbardata.
In definitiva, una valutazione dell’effetto, sulle prestazioni del velivolo, della transizione dello strato limite, cosi come il calcolo delle derivate aerodinamiche mancanti, costituiscono auspicabili spunti di ricerca per lavori futuri.
105
BIBLIOGRAFIA
[1] LOMBARDI GIOVANNI
“Aerodinamica degli aeromobili”. Università di Pisa, Dipartimento di Ingegneria Aerospaziale
[2] CASAROSA CARLO
“Meccanica del volo”. Pisa: Plus 2004.
[3] BETA CAE Systems SA.
“ANSA version 12.0.1 Tutorial Guide”. 2005
[4] CD-Adapco.
“User Guide StarCCM+ Version 8.04”. 2013.
[5] VITTORIO PAJNO