3.1 Cenni di analisi dinamica
Nei vari settori dell’ingegneria è sempre necessario, per l’analisi di un qualunque fenomeno fisico, ricorrere a modelli ovvero alla trasposizione del fenomeno fisico all’interno di una teoria matematica. Con la teoria della modellazione agli elementi finiti si possono oggi costruire, grazie allo sviluppo dei sistemi informatici, modelli numerici sempre più fedeli al reale comportamento di una struttura. La modellazione dinamica analitica della risposta di una struttura è descritta attraverso un insieme di funzioni continue nello spazio e nel tempo, che rappresentano grandezze fisiche come lo spostamento. In un modello agli elementi finiti si passa da una rappresentazione di tipo continuo nello spazio ad una di tipo discreto, studiando le funzioni in una serie di punti chiamati nodi. Ogni funzione che descrive il comportamento del nodo è detta grado di libertà. Il più semplice modello dinamico è quello ad un grado di libertà, l’oscillatore semplice, per il quale è sufficiente un’unica funzione per descrivere il comportamento della struttura. La risposta dinamica di un sistema è caratterizzata dalle proprietà intrinseche della struttura ovvero massa, rigidezza e smorzamento correlate rispettivamente alle forze inerziali, elastiche e dissipative. L’oscillatore semplice è un modello in cui l’inerzia è rappresentata da una massa M infinitamente rigida, l’elasticità da una molla ideale priva di massa e rigidezza K e lo smorzamento da uno smorzatore viscoso ideale privo di massa e rigidezza, con C coefficiente di smorzamento. In realtà la maggioranza delle strutture reali non possono essere modellate come oscillatori semplici, ma sono necessari modelli a più gradi di libertà.
3.1.1 Sistemi ad N gradi di libertà
Figura 3.1 : Sistema ad N gradi di liberà ( dof )
Il comportamento dinamico di un sistema ad N gradi di libertà può essere descritto, ricorrendo ad un legame costitutivo di tipo elastico lineare, come nell’equazione (3.1)
[M] {x(t)} + [C] {x(t)} + [K] {x(t)} = {F(t)}&& & (3.1)
dove [M], [C] e [K] sono rispettivamente le matrici quadrate di ordine N di massa, di smorzamento e di rigidezza, mentre x, x& , x&& sono rispettivamente i vettori degli spostamenti, delle velocità e delle accelerazioni relative ai gradi di libertà ed F(t) è il vettore delle forze applicate.
3.1.1.1 Sistemi non smorzati
Consideriamo il problema delle oscillazioni libere ovvero il caso di forze esterne nulle e matrice dello smorzamento
[ ]
C nulla, allora la (3.1) si riduce alla seguente:[ M x]{ } && +[ K x]{ } {0}= (3.2)
La soluzione del problema è un vettore di coordinate sincrone della forma:
( )
{ }
x t ={ }
X eiωt (3.3)Sostituendo la (3.3) nella (3.2) si ottiene:
[ ]
K -ω2[ ]
M{ }
X{ }
0 =
(3.4)
Questa, eccetto la soluzione banale nulla, è l’equazione caratteristica di un problema agli autovalori:
[ ]
2[ ]
det K -ω M = 0 (3.5)
Sostituendo nel sistema ogni autovalore ω2
r, trovato dalla soluzione della (3.5), si ottengono N
possibili vettori soluzione {Ψr} a componenti reali, autovettori del problema.
Raccogliendo insieme gli N autovettori, chiamati anche modi o forme modali, è possibile utilizzare una rappresentazione matriciale:
[ ][ ][ ] [ ][ ]
Ω M Ψ = K Ψ (3.6) dove [Ω] e [Ψ] sono rispettivamente:[ ]
NxN N ω ω ω = Ω L LL M M O M L 2 1 2 2 2 0 0 0 0 0 0 matrice spettrale[ ]
Ψ NxN = { }{ } { }
ψ ψ1 2 ... ψN matrice modaleEssendo la matrice modale simmetrica possiamo dimostrare due importanti proprietà note come proprietà di ortogonalità:
[ ] [ ][ ]
0 0 T r K k Ψ Ψ = O O (3.7)[ ][ ][ ]
0 0 r M m Ψ Ψ = O O (3.8)con kr e mr rigidezze e masse generalizzate relative al modo r(k mr / r =ωr2 ). Gli autovettori
sono definiti a meno di un fattore di scala che dipende dal tipo di normalizzazione adottata. Una scelta comune è la normalizzazione rispetto alla matrice delle masse e le equazioni (3.7) e (3.8) si particolarizzano nelle (3.9) e (3.10):
[ ] [ ][ ] [ ]
T M I Φ Φ = (3.9)[ ] [ ][ ]
ΦT K Φ = Ω 2 (3.10) dove{ }
{ }
{ }
[ ]
{ }
1 1 r r r r T r r M r m γ γ Φ = Ψ = = Ψ Ψ (3.11)Introducendo una trasformazione di coordinate
{ }
x(t) =[ ]
Φ{ }
q(t) nella (3.2) e pre-moltiplicando per[ ]
Φ ,dove il vettore q(t) è denominato vettore modale degli spostamenti, è T possibile ottenere un sistema di equazioni disaccoppiate:[ ]
I q t{ }
( )
+ Ω 2{ }
q t( )
={ }
0
&& (3.12)
Ciascuna delle equazioni del sistema (3.12) è l’equazione di moto di un oscillatore semplice di massa unitaria e rigidezza ωr2.
3.1.1.2 Sistemi smorzati
In presenza di fenomeni dissipativi, il problema dell’equilibrio dinamico di un sistema ad N gradi di libertà viene formulato in modo diverso a seconda del modello di smorzamento assunto. Si definiscono i seguenti tipi di smorzamento [1], [3], [4]:
• Modelli di smorzamento viscoso. Uno smorzatore viscoso oppone alla velocità relativa fra due nodi una forza ad essa proporzionale attraverso una costante “c” detta coefficiente di smorzamento viscoso: f = & . E’ un modello poco rappresentativo delle cx oscillazioni stazionarie. Comporta, infatti, che l’energia dissipata in un periodo sia proporzionale oltre che al quadrato dell’ampiezza anche alla frequenza delle oscillazioni, contrariamente ai riscontri sperimentali.
2π ω 2 0 E f (x)dx X c ∆ =
∫
= π ω• Modelli di smorzamento viscoso proporzionale: la matrice di smorzamento è combinazione lineare della matrice delle masse e delle rigidezze.
Se
[ ]
C non è diagonalizzabile da[ ]
Φ , allora si passa alla rappresentazione nello spazio di stato = x x x & .Le oscillazioni libere di un sistema smorzato sono descritte da :
M⋅x&&+C⋅x&+K⋅x=0 (3.13)
E’ possibile dimostrare che il problema agli autovalori del sistema smorzato possiede gli stessi autovettori di quello non smorzato e autovalori:
2 2(1 )
r r
dr ω ζ
ω = − (3.14)
Nel caso particolare di smorzamento viscoso proporzionale, ovvero la matrice [C] è ottenuta come una combinazione lineare delle matrici delle masse e delle rigidezze come in (3.15):
[ ] [ ] [ ]
C =ε K +υ M (3.15) In questo caso è possibile operare lo stesso cambiamento di coordinate del problema nonsmorzato ( )
{ }
x t = Φ[ ]
NxN{ }
q t( ) e per le proprietà di ortogonalità ottenere ancora il disaccoppiamento delle equazioni del sistema. In particolare la (3.12) diventa:( )
{ }
{ }
( )
{ }
( )
{ }
0 0 2 0 0 0 r r r q t ξ ω q t ω q t + + = O O && & O O (3.16)Con / 2ξr =cr mrωr coefficiente di smorzamento del modo r. In questo caso la soluzione delle equazioni del moto ha la stessa forma del caso non smorzato (3.3). Gli autovalori della (3.16) sono complessi coniugati e possono essere ottenuti nella seguente forma:
* 2
, -
1-r r r r i r r
λ λ = ξ ω ± ω ξ (3.17)
Nel caso di smorzamento non proporzionale, il problema agli autovalori può essere impostato in maniera differente. Si considera il sistema di equazioni del moto iniziali e se ne raddoppia la dimensione aggiungendo N equazioni (le derivate prime delle N equazioni)e N incognite (le N derivate prime delle N coordinate indagate) analizzando una nuova trattazione del problema definita spazio delle fasi.
Il vettore delle incognite
{ }
( )
2Nx1
u t e il sistema di equazioni del moto diventano:
( )
{ }
u t x t( )( ) x t = & (3.18)[ ]
P u t{ }
&( )
+[ ]
S u t{ }
( )
={ }
0 (3.19)[ ]
;[ ]
0 0 0 C M K P S M M = = − (3.20)Si perviene ad un classico problema agli autovalori di dimensione doppia rispetto ai casi precedenti. Si cerca una soluzione in forma generale del tipo
{ }
( )
{ }
{ }
t{ }
t X u t e U e X λ λ λ = = eattraverso la trasformata di Laplace si ricava:
[ ] [ ]
P S{ }
U{ }
0 λ + =
(3.21)
Gli autovalori sono le 2N radici complesse coniugate dell’equazione caratteristica (3.20), gli autovettori le soluzioni del sistema per i corrispondenti valori λr.
[ ] [ ]
detλ P + S =0 (3.22)
L’r-esima coppia autovalore λr e autovettore
{ }
{ }
{ }
{ }
{ }
{
}
{ }
* * * * ; r r r r r λr r λr Ψ Ψ ′ ′ Ψ = Ψ = Ψ Ψ sonoautovalori e autovettori complessi coniugati.
Definendo con r 2 r r r r r r b λ = - = -ξ ω ±iω 1-ξ a si ha che :
[
λr[ ] [ ]
P + S]
{ } { }
Ψr = 0 (3.23)Anche in questo caso valgono le proprietà di ortogonalità:
[ ] [ ][ ]
[ ] [ ][ ]
= Ψ Ψ = Ψ Ψ N T N T b b S a a P 2 1 2 1 0 0 0 0 O O (3.24)Consideriamo ora il caso di oscillazioni forzate, il sistema di equazioni del moto diventano:
[ ]
{ }
( )
[ ]
{ }
( )
1 ( ) 0Nx f t P u t + S u t = & (3.25)La soluzione particolare del problema si può esprimere come combinazione lineare degli autovettori del problema omogeneo associato (3.26):
{ }
u(t) =[ ]
Ψ'{ }
m(t) (3.26) Posto{
( )
}
{ }
( )
{ }
2 1 f t 0 Nx f t′ = le (3.25) diventano:[ ]
P u t{ }
&( ) +[ ]
S u t{ }
( ) ={
f t′( )
}
(3.27) da cui si ha:[ ][ ]
P Ψ &'{ }
m(t) +[ ][ ]
S Ψ'{ } {
m(t) = fII'(t)}
(3.28) Pre-moltiplicando per[ ]
Ψ e utilizzando le proprietà di ortogonalità si ha il ′ T disaccoppiamento delle equazioni del sistema:{ }
{ }
( )[ ]
'{
'( )}
0 0 ) ( 0 0 2 1 2 1 t f t m b b t m a a II N N Ψ = + O & O (3.29)L’r-esima soluzione è rappresentata dalla (3.30):
{ }{
' '( )}
1 ) ( ) ( f t a t m t m r II r r r r −λ = Ψ & (3.30)3.1.1.3 Modello Modale
L’insieme delle frequenze proprie, degli smorzamenti e delle forme modali costituisce il
modello modale capace di rappresentare completamente il comportamento di una struttura.
Infatti dal modello modale
[ ]
Φ ,[ ]
Ω ,2[
2ζω]
è possibile ricostruire il modello spaziale[ ]
M ,[ ]K ,[ ]C .3.1.1.4 Modello di risposta
Il problema dinamico può essere rappresentato in una diversa forma: attraverso la trasformata di Fourier è possibile scrivere la (3.1) nella forma:
[ ] [ ] [ ]
{
( )
}
{
}
2 -ω M +iω C + K X ω = F(ω) (3.31) ponendo -ω M +iω C + K2[ ] [ ] [ ]
= Z( )
ω la (3.34) diventa:[
Z(ω)][
X(ω)] [
= F(ω)]
(3.32) dalla quale: [] [ ]
[
[
]
]
) ( ) ( ) ( 1 ) ( ω ω ω ω F X Z H = = (3.33)La matrice H
( )
ω è definita come matrice di risposta in frequenza del sistema o matrice diRecettanza. La generica componente αjk rappresenta il rapporto tra la trasformata di Fourier
della risposta della coordinata j la trasformata della forzante applicata in k.
( )
j N(
kr jr)
(
kr* jr*)
jk * * r=1 k r r r r X α = + F a iω-λ a iω-λ ω =∑
Φ Φ Φ Φ (3.34) in cui * 2 r r r r r r λ ,λ = -ζ ω ±iω 1-ζLa matrice di Recettanza descrive la risposta dinamica del sistema e ne costituisce il cosiddetto modello di risposta.
Nella pratica dell’analisi dinamica sperimentale, sono solitamente misurate, in alcune parti della struttura, le accelerazioni.
Oltre alla recettanza esistono altre grandezze che correlano la trasformata di Fourier della velocità e delle accelerazioni alla trasformata della forzante:
Recettanza
[
]
{
( )
}
{
}
X ω H(ω) F(ω) = (3.35) Mobilità[
]
{
( )
}
{
}
X ω Y(ω) F(ω) = & (3.36) Acceleranza o Inertanza[
]
{
( )
}
{
}
X ω A(ω) F(ω) = && (3.37)Dalle proprietà della trasformata di Fourier si ottengono le seguenti relazioni per Mobilità e
Acceleranza:
( )
( )
Y ω =iω H ω (3.38)( )
2( )
A ω = −ω H ω (3.39)3.1.1.5 Relazione fra i modelli
I tre tipi di modelli spaziale, modale e di risposta, definiti in precedenza, sono tra loro collegati. In figura (Fig. 3.2) sono evidenziati i legami che intercorrono tra i modelli e le operazioni di conversione [4].
Figura 3.2 : Schema di passaggio tra i modelli
Il passaggio dal modello di risposta al modello modale, definita come analisi modale
sperimentale o identificazione modale, costituisce la base per l’identificazione strutturale sperimentale. L’identificazione strutturale è la determinazione dei parametri meccanici, ovvero le matrici delle masse
[ ]
M e delle rigidezze[ ]
K del sistema, sulla base dei parametri modali ottenuti dall’analisi sperimentale dinamica. Spesso dalla sperimentazione è ricavabile un numero limitato di parametri modali rispetto a quelli necessari per la completaidentificazione strutturale, perciò possibile operare solo su modelli incompleti e le principali cause di incompletezza sono:
• il limitato contenuto in frequenza della forzante {F} che comporta una difficile identificazione dei modi di vibrare debolmente eccitati;
• la limitata disponibilità degli strumenti di misura;
• inconvenienti sulla trasformazione dei dati mediante FFT (Fast Fourier Trasform) dovuti al campionamento delle misure in forma discreta;
• influenza delle condizioni ambientali che possono alterare le misure acquisite.
A causa della incompletezza dell’identificazione modale le matrici caratteristiche del sistema, generalmente quadrate, possono risultare rettangolari e quindi parziali; ciò comporta una difficoltà aggiuntiva per la loro inversione che, come noto, non è più univoca. L’identificazione strutturale perde quindi la sua caratteristica di passaggio univoco assumendo la qualifica di stima del modello che meglio simula i dati sperimentali.
3.2 Analisi sperimentale dinamica
L’analisi dinamica sperimentale è l’insieme delle operazioni che permettono di ottenere i parametri modali del sistema dalla misura della risposta dinamica, ovvero frequenze di risonanza, fattori di smorzamento e forme modali [1], [4]. Le fasi dell’analisi possono essere sinteticamente descritte nel seguente modo (Fig. 3.3):
• Acquisizione dei dati sperimentali
• Analisi delle misure attraverso tecniche numeriche • Elaborazione dei risultati per ottenere i parametri modali.
Acquisizione dati sperimentali
MODAL TEST DINAMICARISPOSTA
x(t), v(t), a(t)
Metodi nel Dominio delle Frequenze
Funzione di Risposta in frequenza
H(w)
Filtraggio dei dati acquisiti Kalman, Moving Averange Metodi di tipo ARMA Funzione di Risposta in frequenza H(w) Funzione di Risposta in frequenza H(w) Parametri Modali
Elaborazione dei dati Analisi delle misure
Figura 3.3 : Schema dell’analisi dinamica sperimentale [2].
L’apparato strumentale necessario per l’analisi dinamica sperimentale è in genere costituito da (Fig. 3.4):
• Sistema di sollecitazione
• Analizzatore
• Sistema di controllo per la gestione delle prove, analisi delle FRF, estrazione dei parametri modali.
L’identificazione strutturale è un sistema di controllo delle strutture che permette di esprimere valutazioni sia in sede di:
• Progetto utilizzato come strumento di verifica della modellazione di strutture esistenti o di nuove soluzioni progettuali;
• Collaudo utilizzato come verifica dell’effettivo comportamento della struttura; • Esercizio utilizzato come strumento di diagnosi preventiva, monitoraggio e controllo post-evento.
Figura 3.4 : Schema acquisizione dati.
Un indagine di questo tipo non è generalmente finalizzata a se stessa, costituisce piuttosto, una fase importante di procedure ingegneristiche più significative, come l’identificazione
Analisi Dinamica Sperimentale
Determinazione dei parametri modali della struttura
Identificazione Strutturale
Determinazione dei parametri meccanici
di un modello strutturale opportuno
Localizzazione del Danno
Studio della variazione nel tempo dei parametri del modello strutturale
Con il nome di localizzazione del danno sono invece indicate le procedure per la localizzazione e la quantificazione del danneggiamento di una struttura attraverso l’analisi e la misura della variazione delle sue proprietà dinamiche. Il danno può essere di diversi tipi:
• la crisi del materiale strutturale che può manifestarsi sotto forma di rotture localizzate, instabilità globali o locali, fratture o plasticizzazioni;
• la crisi delle connessioni tra gli elementi strutturali,
• la perdita di una qualunque parte assemblata, anche non strutturale, come ad esempio la caduta dei tamponamenti nelle strutture intelaiate;
Tutte queste forme di danno influenzano le proprietà dinamiche della costruzione attraverso una variazione delle masse strutturali, delle caratteristiche di rigidezza, di smorzamento dei singoli elementi strutturali e dell’intera struttura.
3.2.1 Applicazione della forzante
E’ importante per la completa identificazione la conoscenza delle forzanti utilizzate per sollecitare la struttura. Tra le forzanti più comunemente utilizzate si ricordano quelle impulsive, generate attraverso martelli muniti di trasduttore di forza, e quelle periodiche, fornite tramite vibratori elettroidraulici o shaker elettromagnetici opportunamente strumentati. Esistono oggi tecniche di analisi che sopperiscono alla mancata conoscenza della storia della forzante, utilizzando per l’identificazione le vibrazioni libere generate da un evento generico sulla struttura, come l’urto di corpo o la brusca rimozione di un vincolo in forza o il rumore ambientale. Recenti studi sono stati inoltre indirizzati verso l’utilizzo di forzanti di tipo di random, definite da una funzione di probabilità di tipo normale. Un esempio di queste forzanti è dato dal moto dei veicoli su di un ponte per un periodo di tempo sufficientemente lungo.
3.2.2 Misura della risposta
Le grandezze fisiche rappresentative della risposta dinamica sono spostamenti, velocità e accelerazioni [5], [6], [7]. Per la misura degli spostamenti relativi possono essere usati trasduttori di spostamento LVDTs (Linear Variable Differential Transformers) e per la misura delle rotazioni trasduttori tipo RVDTs (Rotary Variable Differential Transformers). I trasduttori di spostamento e rotazione, sebbene in uso da molti anni, sono influenzati fortemente dal rumore e poco adatti per cogliere basse frequenze e piccoli spostamenti. Solitamente, nella misura delle vibrazioni, vengono utilizzati trasduttori accelerometrici, perché dotati di un ridotto ingombro, per l’accuratezza della misura in un ampio campo di frequenze e il costo limitato. I parametri che caratterizzano gli accelerometri sono la sensitività, ovvero la differenza di tensione letta ai capi dell’accelerometro in corrispondenza di un’accelerazione pari a g (mV/g) e la risoluzione, equivalente all’ accelerazione minima che si può percepire con lo strumento (m/s2). Gli accelerometri piezoelettrici sono i più comuni : possiedono buona sensitività e bassa risoluzione, anche se esiste una certa variazione dell’accuratezza a seconda del tipo e del modello. Sono molto compatti, garantiscono un
ampio intervallo di frequenze utili all’interno del quale esibiscono un’ottima linearità. Il principio di funzionamento è molto semplice : una massa sismica e un cristallo piezoelettrico si sovrappongono concentrici ad un nucleo rigido collegato alla struttura. Il moto della massa sismica è equivalente al moto del supporto; per la prima legge di Newton si genera una forza che viene trasmessa dalla massa al cristallo deformandolo e alterando la sua resistenza elettrica.
3.2.2.1 Disposizione degli strumenti di misura
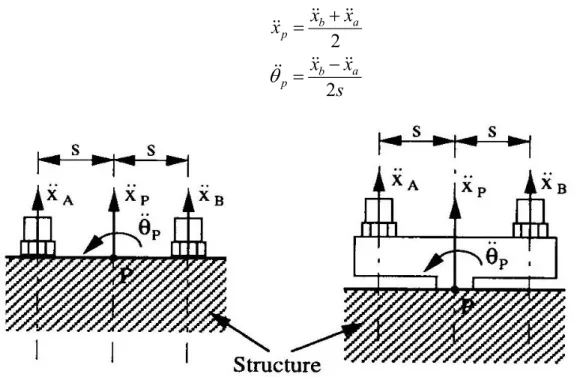
Attraverso un’opportuna disposizione degli accelerometri è possibile ottenere anche una misura delle rotazioni. Si suppone che collegando due accelerometri paralleli e in posizione ravvicinata, rigidamente alla struttura, o ad un blocco ausiliario, sia possibile ricavare, dall’equazioni di moto rigido, l’accelerazione e la rotazione di un punto interno P a partire dalle letture traslazionali dei sensori (Fig. 3.5):
2 2 a b p a b p x x x x x s
θ
+ = − = && && && && && &&Figura 3.5 : Tecnica di misura delle rotazioni mediante accelerometri.
La misura della risposta è, in ogni caso, influenzata da fattori ambientali come deformazione del supporto, rumore, rapide variazioni termiche, umidità e sporcizia in prossimità del
sensore. Il segnale in uscita dai sensori viene amplificato attraverso un sistema di amplificazione multicanale della risposta.
3.2.3 Analisi della risposta
La determinazione sperimentale dei parametri modali passa attraverso l’applicazione ai dati acquisiti di opportuni metodi, detti identificazione modale. Spesso i dati vengono preliminarmente trattati con tecniche di filtraggio di tipo probabilistico come la media mobile per ridurre gli errori accidentali di misura.
I metodi di identificazione modale che sono stati sviluppati sono numerosi e la loro evoluzione è strettamente legata a quella della tecnologia delle apparecchiature rese disponibili nel corso del tempo. Oggi alcune di queste tecniche sono state implementate in softwares commerciali e con il programma di acquisizione dati costituiscono un pacchetto completo per l’identificazione modale.
Stato dell’arte. I primi metodi operavano in termini di frequenze utilizzando apparecchiature analogiche come gli analizzatori Fast Fourier Trasform ottenendo direttamente in sede di prova gli spettri della risposta strutturale nei punti misurati. Questi metodi basati sull’algoritmo FFT (Fast Fourier Transform), proposto da parte di Cooley e Tukey (1965) avevano il vantaggio di valutare la trasformata discreta di Fourier delle storie di accelerazione attraverso un numero ridotto di operazioni. I primi tentativi nell’estrazione dei parametri modali si limivano proprio all’osservazione diretta dell’output degli analizzatori. Fra questi si ricordano il metodo dei picchi (Peak Amplitude) e il metodo dei punti di quadratura (Quadrature Response) [1], [4]. Il primo considera lo spettro di risposta in termini di ampiezza: localizza le frequenze naturali in corrispondenza dei picchi, deduce il fattore di smorzamento dalla forma del picco e le forme modali dai rapporti delle ampiezze dei picchi nei punti di misura. Il secondo metodo individua le frequenze naturali dai punti di nullo della componente reale o dai massimi della componente immaginaria dello spettro e determina allo stesso modo smorzamento e forme modali. I limiti di queste operazioni sono l’imprecisione della derivazione dei parametri e il risultato di forme modali comunque reali poiché ottenute da rapporti di ampiezza in punti di misura diversi. A questa categoria appartengono due
tecniche che sono state un riferimento molto importante : il metodo dell’interpolazione mediante circonferenze (Circle Fitting) ed il metodo inverso (Inverse Method).
Il “Circe Fitting”, introdotto da “Kennedy-Pancu”, e successivamente implementato da Klosterman (1971) si basa sulla considerazione che il diagramma della recettanza nel piano di Nyquist (piano complesso) evidenzia delle circonferenze in prossimità delle risonanze .
Il Metodo Inverso, sviluppato da Dobson, si basa invece sulla rappresentazione nel piano di Nyquist della funzione inversa della FRF, la quale evidenzia la formazione di tratti rettilinei in corrispondenza delle risonanze.
Le difficoltà incontrate a trattare problemi ad alta densità modale (leakage) e le limitazioni sulla risoluzione della frequenza di campionamento (aliasing), hanno favorito lo sviluppo di tecniche relative a variabili nel dominio del tempo a differenza di quelle nel dominio delle frequenze. Il limite di questa alternativa è l’impossibilità di mettere in conto il contributo dei modi residui al range di quelli identificati e l’onere del trattamento del segnale.
Lo sviluppo dei calcolatori elettronici e dei personal computer ha permesso l’utilizzo di algoritmi più complessi, ed in seguito al moltiplicarsi delle tecniche di disponibili, la letteratura ne fornisce una classificazione rigorosa (Fig. 3.6) [4], [8].
ANALISI MODALE METODI DI IDENTIFICAZIONE DOMINIO DEL TEMPO TUNED-SINUSOIDAL METHOD DOMINIO DELLE FREQUENZE METODI DIRETTI METODI INDIRETTI METODI DIRETTI METODI INDIRETTI
M-DOF M-DOF M-DOF M-DOF M-DOF
SISO SIMO MIMO SISO MIMO SISO MIMO SISO MIMO SISO SIMO MIMO
• Metodi nel dominio del tempo, delle frequenze e metodi sincroni. Metodi nel dominio del tempo e delle frequenze relativamente al tipo di variabile rispetto alla quale viene effettuata la regressione dei dati. I primi si prediligono quando la densità modale è elevata e il range di frequenze analizzate ristretto, i secondi nei casi complementari. Una categoria a parte sono i cosiddetti “Tuned Sinusoidal Methods” che si prefiggono di eccitare sperimentalmente i modi reali di un generico sistema smorzato, attraverso forzanti sinusoidali sincrone spazialmente distribuite in modo da bilanciare nel loro complesso le forze viscose.
• Metodi diretti e indiretti. Nei metodi indiretti il risultato dell’ identificazione sono i parametri modali, piuttosto che le matrici del modello spaziale come avviene nei metodi diretti. Attraverso alcuni metodi di quest’ultima categoria è, comunque, possibile determinare i parametri modali, risolvendo il problema agli autovalori corrispondente alle matrici ottenute.
• Metodi Sdof / Mdof. A seconda del numero dei modi identificati attraverso una singola operazione di regressione si distinguono metodi Sdof (Single degree of freedom) e metodi Mdof (Multiple degree of freedom). Nel dominio del tempo si può operare con sole analisi Mdof, nel dominio delle frequenze si utilizzano, per i metodi indiretti, analisi Sdof e Mdof. I metodi diretti prevedono solo analisi Mdof.
• Metodi SISO / SIMO / MISO / MIMO. Alcuni metodi operano su una sola funzione di risposta (metodi Single Input Single Output), altri trattano simultaneamente le FRFs dovute ad una stessa eccitazione e misurate in postazioni diverse (metodi Single Input Multi Output). Questi ultimi basati sulla teoria che frequenze naturali e fattori di smorzamento sono proprietà globali del sistema e non variano da una funzione di risposta all’altra. Un’elaborazione simultanea di outputs diversi fornisce una stima più consistente di quella che si avrebbe mediando i risultati di analisi SISO condotte separatamente. Allo stesso modo i metodi MIMO (metodi Multi Input Multi Output) elaborano simultaneamente le FRFs dovute a più di una forzante, misurate in postazioni diverse. Esistono, infine, MISO (metodi Multi Input Single Output) ma trovano scarso impiego nell’analisi modale.
La scelta di operare rispetto alla variabile tempo oppure alla frequenza dipende dal tipo di struttura da identificare. Per strutture caratterizzate da un basso coefficiente di smorzamento risultano più efficaci i metodi nel dominio del tempo e, viceversa, per strutture con elevato coefficiente di smorzamento sono più attendibili quelli nel dominio delle frequenze. In letteratura si trovano numerosi metodi sia nel dominio del tempo, sia nel dominio delle frequenze (Fig. 3.7, 3.8). Recenti sviluppi dell’identificazione modale hanno condotto a modelli Auto Regressive Moving Average ARMA [4], [9]. Tali modelli si basano sull’ipotesi di poter descrivere il comportamento del sistema attraverso un’equazione differenziale lineare delle funzioni spostamento continue nel tempo passando ad una rappresentazione discreta nel tempo delle stesse. In tal modo è possibile esprimere il valore della funzione nell’istante t sulla base degli istanti precedenti. Questa formulazione rende molto semplice l’operazione di regressione dei dati misurati per la stima dei coefficienti. Inoltre, l’operazione di somma dei valori della funzione di risposta in n istanti consecutivi per la stima della risposta costituisce una forma di trattamento dei dati per attenuare gli errori di misura (Moving Average).
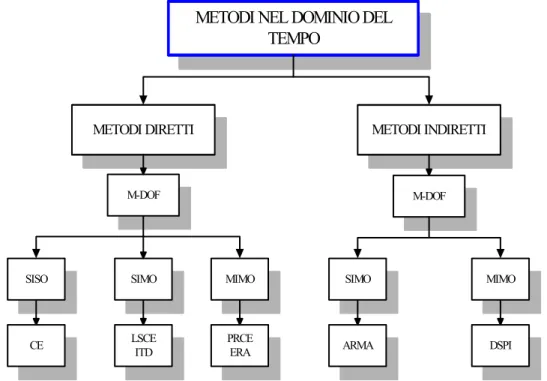
METODI NEL DOMINIO DEL TEMPO
METODI DIRETTI METODI INDIRETTI
M-DOF M-DOF
SISO SIMO MIMO
CE LSCEITD PRCEERA
SIMO MIMO
ARMA DSPI
Figura 3.7 : Classificazione dei metodi nel dominio del tempo CE (Complex Exponential Method), LSCE ( Least Square Complex Exponential Method), PRCE ( Poly Reference Complex Exponential Method), ITD ( Ibrahim Time Domain Method), ERA (Eigensystem
Realisation Method), ARMA (Auto Regressive Moving Average Method), DSPI (Direct System Parameter Identification Method).
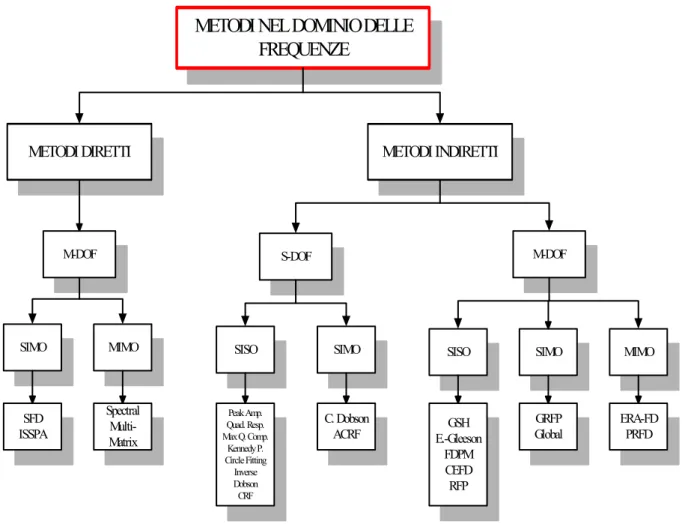
METODI NEL DOMINIO DELLE FREQUENZE
METODI DIRETTI METODI INDIRETTI
M-DOF M-DOF SIMO MIMO SFD ISSPA Spectral Multi-Matrix SISO SIMO Peak Amp. Quad. Resp. Max Q. Comp. Kennedy P. Circle Fitting Inverse Dobson CRF C. Dobson ACRF S-DOF SISO GSH E.-Gleeson FDPM CEFD RFP MIMO ERA-FD PRFD SIMO GRFP Global
Figura 3.8 : Classificazione dei metodi nel dominio delle frequenze CRF (Characteristic Response Function), ACRF (Advanced Characteristic Response Function), FDPM (Frequency Domain Prony Method), CEFD (complex Exponential Frequency Domain), RFP (Rational Fraction Polynomial), GRFP (Global Rational Fraction Polynomial), ERA-FD (Eigensystem Realisation Algorithm-Frequency Domain), PRFD (Poly Reference Frequency Domain), ISSPA (Identification of Structural System Parameter).
3.3
Metodi output-only
Nell’analisi modale sperimentale classica (metodi di identificazione input-output), una forzante misurabile è applicata alla struttura (input) e sono misurate le vibrazioni (output). Da queste misure, possiamo ottenere il modello sperimentale da una varietà di metodi di stima dei parametri.
Tuttavia esistono casi in cui è piuttosto difficile applicare una forzante artificiale o dove l’unica forzante disponibile è l’eccitazione ambientale. In pratica è impossibile misurare
l’eccitazione ambientale (l’eccitazione può essere, come nel caso in esame, anche ottenuta con mezzi meccanici) e la risposta del sistema (output) è l’unica informazione che può essere processata da algoritmi di identificazione. Questo perché la conoscenza deterministica dell’input è la relazione di un processo stocastico (rumore bianco), chiamato Sistema di
Identificazione Stocastico . In particolar modo per le strutture vibranti si parla di Analisi
Operativa Modale o Analisi Modale di Solo Output.
Un problema comune del metodo d’analisi operativa modale è che se l’assunzione del rumore bianco è violata, per esempio in aggiunta al rumore bianco vi è qualche componente dominante di frequenza, questa componente in frequenza non può essere separata dalle frequenze proprie del sistema e identificata da se.
La necessità di seguire analisi modali output-only è probabilmente emersa per prima per l’ingegneria civile, dove è molto costoso e difficile eccitare una struttura come un ponte con un martello o una vibrodina e ottenere artificialmente livelli di vibrazione superiori a quelle indotte dal traffico.
In ogni caso, anche nell’ingegneria aerospaziale e meccanica, l’analisi modale operativa fornisce un grande aiuto: per esempio dei parametri modali di una vettura durante un test su strada o di un aeroplano durante una prova di volo.
Già dai primi anni 90, l’analisi modale operativa (OMA), richiamava grande attenzione nell’ingegneria civile con l’applicazione per problemi delle piattaforme off-shore ,torri,ponti ecc. .OMA utilizza solo le risposte misurate dalle strutture che sono soggette all’eccitazione naturale o ambientale per identificare le caratteristiche modali.
I vantaggi dell’Identificazione Modale a Soli Output possono essere riassunte così:
• OMA è economico e veloce da eseguire e non richiede apparecchiature elaborate. Generalmente l’analisi sperimentale si riconduce alla misura delle risposte.
• Le caratteristiche dinamiche del sistema completo sono i maggiori punti rappresentativi del lavoro che si può ottenere.
• Tutti o parte dei punti di misura possono essere usati come reference. Tuttavia l’algoritmo di identificazione usato per OMA deve essere di tipo MIMO. Come conseguenza, modi omogenei ripetuti possono essere facilmente maneggiati e quindi risulta adatto per strutture complesse.
• L’identificazione modale operativa con la misura del solo output può essere utilizzata non solo per la progettazione dinamica e per il controllo delle strutture, ma anche per il monitoraggio basato sulle vibrazioni che da indicazioni sullo stato di salute delle strutture e permette di investigare sul danno.
In figura 3.9 è rappresentata una classificazione delle tecniche di identificazionemodale di solo output come indicato da Peeters e De Roeck.
Figura 3.9 : Classificazione dei metodi di identificazione output-only: Inst.Va = Instrumental Variable method, Cov = Covariance driven Stochastic Subspace Identification, SSI-Data= Data driven Subspace Identification, Pre.Err = Prediction Error method, P.P = Peak
Picking method, CMIF = Complex Mode Identification Function, Max.Lik = Maximum likehood Identification.
3.4
Algoritmo di identificazione modale S.S.I.
Lo Stochastic Subspace Identification Method (SSI) è una tecnica di identificazione modale per le prove e l'analisi dinamiche output-only. Di tale metodo è stato rivelato la relativa efficacia particolarmente nell'analisi modale della cosiddetta output-only, in cui la procedura di identificazione modale è effettuata soltanto sulle misure in uscita (accelerazioni), perchè impossibile o non praticabile misurare le forzanti.
Sviluppato a K.U. Leuven (Belgio) da Van Overschee e da De l'Moor (1995, 1996) per l'identificazione per sistemi nell'ingegneria elettrica, è stato poi esteso per applicazioni di ingegneria civile da Peeters ed altri (1995), da Peeters e da De Roeck (1997, 1999, 2000); Peeters (2000) fornisce anche un software utile scritto in linguaggio di MATLAB (Peeters ed altri, 1999). Altre applicazioni dell’SSI per strutture civili possono essere trovate in Mevel ed altri (2003a, 2003b), Bodeux e Golinval (2003), Hermans e Van der Auweraer (1999), Ren ed altri (2004), Ren e Zong (2004) e Zong ed altri (2005).Peeters e De Roeck (1999, 2000) e Peeters (2000) inoltre hanno introdotto l'idea dei sensori di riferimento che permette la riduzione della dimensione delle matrici, tramite una fattorizzazione - QR nell’algoritmo. Il concetto di base è prendere anziché tutti gli out-put soltanto alcuni di riferimento, ciò riduce le dimensioni del problema e così anche il tempo di calcolo. Poiché il numero dei sensori di riferimento è limitato, la loro qualità è importante: tutti i modi devono essere presenti nei dati misurati da ciascuno di essi. Se i sensori selezionati come riferimenti hanno misurato bene la risposta della struttura, non è prevista nessuna perdita di qualità dell’identificazione. A volte, per ottenere una buona qualità dell’identificazione è utile omettere i sensori che hanno misurato peggio. La ragione per la quale la proiezione non è limitata agli out-put di riferimento futuri, è che in questo caso si otterrebbe soltanto le ampiezze delle forme modali date dai soli sensori di riferimento, mentre siamo interessati alle forme modali relative a tutti i punti misurati.
Nella prova dinamica soggetta al rumore ambientale applicata a grandi strutture civili, spesso accade che non tutti gli out-put possono essere misurati contemporaneamente, quindi sono previste diverse configurazioni dei sensori. Si utilizzano sensori sovrapposti per le diverse configurazioni, che permettono l’opportuna correlazione di tutti nei successivi passi. I
candidati per gli out-put di riferimento sono questi sensori, comuni ad ogni configurazione perché sono disposti nelle posizioni ottimali della struttura, dove è prevista la possibilità di misurare tutti i modi di vibrare della struttura.
Lo stochastic subspace identification methods ha dei relativi svantaggi tra cui il principale è che la forma modale identificata si ricava a meno di un fattore di scala, perché risultano incognite le forzanti. Recentemente Parloo ed altri, (2002), Brincker ed Andersen (2003), Bernal (2004) hanno elaborato procedure sperimentali che permettono di ottenere la forma modale normalizzata rispetto alle masse del sistema per mezzo di tecniche di analisi modale di output-only.
3.5
Applicazione al caso di studio
Nel realizzare una prova dinamica sperimentale è necessario prima di tutto definire l’obiettivo da raggiungere. Per quanto riguarda il caso in studio gli obbiettivi preposti sono:
• realizzare una descrizione sufficientemente accurata dei parametri modali della struttura, ovvero frequenze proprie, smorzamenti e forme modali.
• ricavare una serie di misure della risposta dinamica sufficienti per la costruzione di una rappresentazione della struttura mediante modelli numerici;
Fissati gli obbiettivi da raggiungere attraverso la sperimentazione dinamica, si procede al progetto della prova. La conoscenza delle tecniche di misura e di applicazione delle forzanti e una buona confidenza con la strumentazione in generale, sono un presupposto indispensabile per progettare e allestire una prova dinamica e per il conseguimento degli obbiettivi preposti. E’ spesso necessario ipotizzare il comportamento dinamico della struttura in esame attraverso lo sviluppo di modelli preliminari. In questo caso il modello è stato scelto in modo tale da poter rappresentare in maniera sufficientemente accurata la risposta dinamica dell’intera struttura. Si sono assunte le ipotesi che le sezioni si mantengano piane e si muovano di moto rigido nel loro piano. Nel modello della prova sono state scelte le sezioni dell’impalcato, per quanto riguarda le travi principali,in corrispondenza della mezzeria, a circa un metro dall’appoggio sulla pila ed a circa un metro dalla sella su cui appoggia la secondaria ; per la
secondaria,oltre che nella mezzeria, sono stati posizionati ad un metro dalla sella di appoggio. Gli accelerometri sono stati posizionati sul lato monte e sul lato valle così da poter cogliere eventuali modi torsionali.(figura 3.10 e 3.11)
E’ stato così definito un modello discreto i con un minor numero di gradi di libertà rispetto al sistema reale,ma in grado di descrivere la cinematica della struttura.
Sulla base del modello è stata progettata la prova, che prevede:
• la scelta del tipo di forzante utilizzata all’interno delle configurazioni di prova previste e la loro modalità di applicazione;
• la scelta dei parametri necessari per la rappresentazione dei parametri modali ed il posizionamento della strumentazione per la loro determinazione.
Figura 3.9 : In rosso sono riportati gli accelerometri.
3.5.1 Forzante applicata
Per mettere in vibrazione la struttura è stata utilizzata una forzante di tipo impulsivo, costituita dai colpi provocati dalla benna di un escavatore Komatsu PC 200 EN, colpi che venivano prodotti facendo “cadere” la benna da circa un metro di altezza .
Figura 3.11 : Escavatore utilizzato
L’escavatore è stato posto fuori dalla struttura,così che la massa del mezzo non alterasse il comportamento dinamico del ponte.
Figura 3.12 : Il momento della “battuta”
La struttura è stata così sollecitata per dieci volte per ogni configurazione degli strumenti per poter avere una campagna di dati raccolti da poter trattare con tecniche statistiche .
3.5.2 Misura della risposta
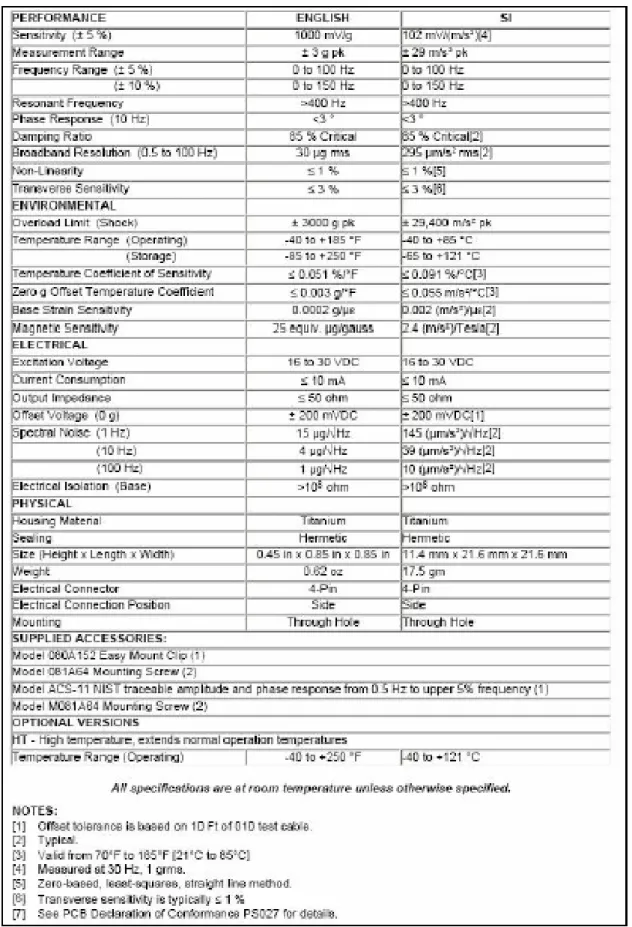
Per misurare la risposta della struttura sono stati utilizzati : • 16 accelerometri monoassiali PCB
• Centralina di acquisizione dati SCADAS III della LMS • Un personal computer
• Cablaggio schermato
3.5.2.1 Accelerometri
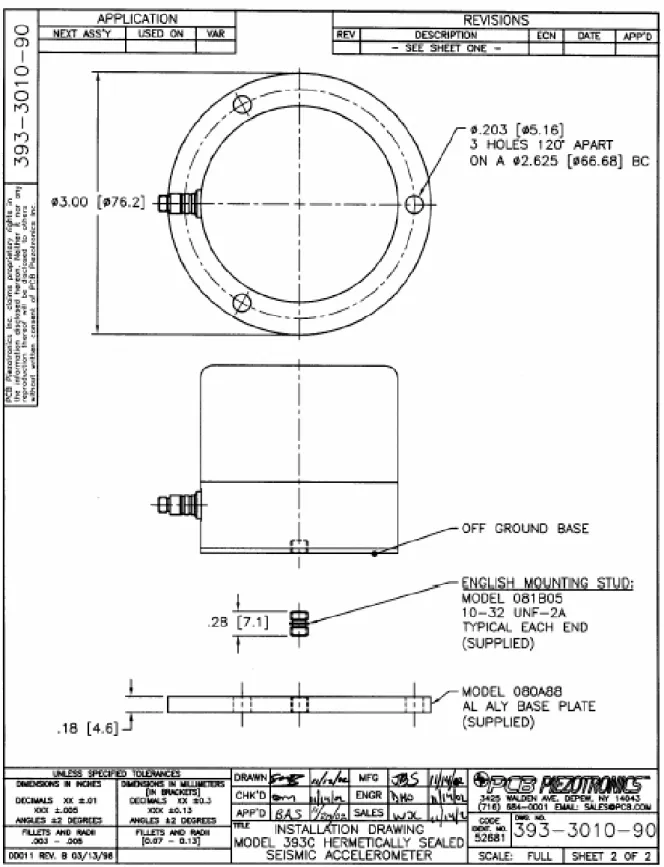
Gli accelerometri utilizzati sono stati di due tipi : 6 di tipo piezoelettrico, montati sulle travi
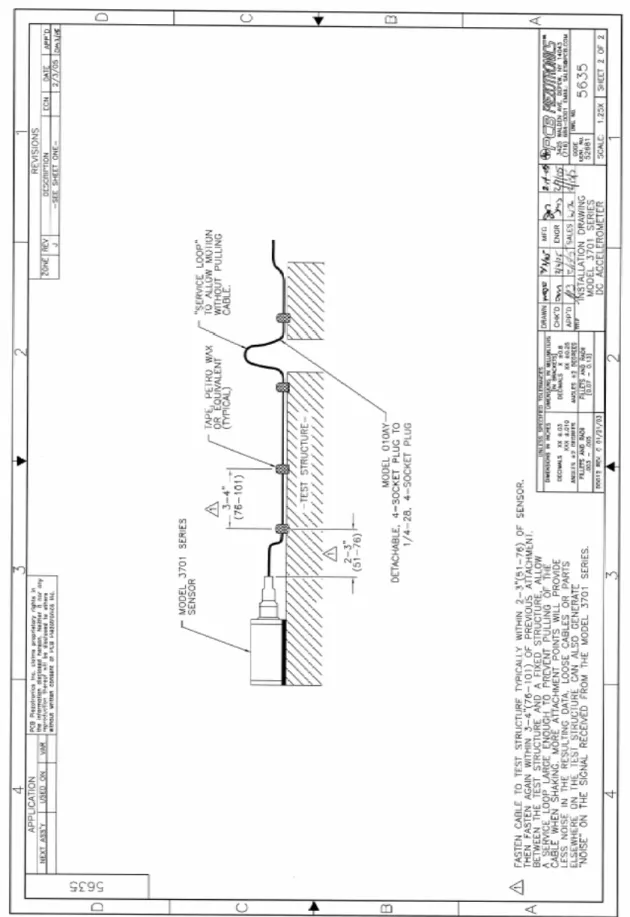
secondarie e 10 di tipo capacitivo, montati quindi sulle travi principali . Di seguito sono riportare le figure, le schede tecniche e gli schemi di montaggio degli accelerometri utilizzati [13].
Figura 3.13 : Accelerometro piezoelettrico PCB 393C
3.5.2.2 Posizionamento accelerometri
Data la notevole estensione della struttura non è stato possibile registrare contemporaneamente tutti i punti di misura prescelta. Il ponte è stato dunque diviso in 10 porzioni (corrispondenti a 10 configurazioni degli accelerometri), formate rispettivamente da una campata principale e da una secondaria, disponendo su ognuna di queste i 16 accelerometri di misura secondo quanto illustrato nelle figure 3.9 e 3.10. In questo modo fra le registrazioni di una configurazione e la successiva, vi erano sempre degli strumenti a comune. Questo ha permesso, in fase di elaborazione, di ottenere le deformate modali dell’intero ponte per costruzione e sovrapposizione delle deformate identificate per ogni configurazione degli strumenti.
Figura 3.15 : Le prime due ambientali nei riquadri rosso e ciano, in verde i punti di stazione, in rosso piccolo il numero di riferimento degli accelerometri .
Per quanto riguarda la centralina di acquisizione dati (figura 3.19), va detto che è stato necessario spostarla durante l’esecuzione delle prove sperimentali. Le posizioni della centralina sono state studiate in modo da minimizzare il numero complessivo di spostamenti, agevolando così la rapidità delle prove.
1
2
1,
2 3,4 5,6 7,8 9,10 11,12 13,14 15,16 17,18 19,20 21,22 23,24
3,4
1,2
Figura 3.16 : Ambientale 1 e 2
Gallicano 3 4 1 2 5 6 7 8 9 10 1, 2 3, 4 5, 6 7, 8 9 ,1 0 1, 2 3,4 5, 6 7,8 9 ,1 0 1, 2 3,4 5, 6 7,8 9 ,1 0 1, 2 3,4 5, 6 7,8 9 ,1 0 1, 2 3,4 5, 6 7,8 9 ,1 0 Coreglia
Figura 3.19 : La centralina SCADAS III
della LMS . Figura 3.20 dell’acquisizione dati . : Un momento
3.6
Risultati dell’analisi dinamica
La determinazione delle deformate modali globali è stata ottenuta attraverso una serie di operazioni abbastanza complesse . Per ogni configurazione dei sensori si è proceduto a costruire la deformata modale attraverso il metodo SSI passando per ogni singola registrazione effettuata da ogni singolo accelerometro, dal dominio del tempo a quello delle frequenze ed ottenendo sia le frequenze proprie della struttura che le relative forme modali.
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 1 745 1489 2233 2977 3721 4465 5209 5953 6697 7441 8185 8929 9673 10417 11161 11905 12649 13393 14137 14881 15625 16369
Figura 3.22 : Registrazione di un accelerometro . Le oltre 16000 letture sono dovute alla frequenza di campionamento di 800 Hz effettuata su circa 20 secondi di registrazione .
Una volte ottenute le forme modali per ogni registrazione e per ogni configurazione degli strumenti, si è selezionato in ogni ambiente e per ogni frequenza identificata, una forma modale e questa selezione è stata possibile utilizzando il MAC :
{ } { }
(
)
{ }
{ }
{ }
{ }
(
)
(
{ }
{ }
)
T * x i A j x i A j T T * * x i x j A j A j MAC , φ φ φ φ = φ φ φ φ 2 (3.40)Il MAC ( Modal Assurance Criterion ), ideato da Allamand & Brown nel 1983, rappresenta una misura della corrispondenza fra i vettori Φ~xe Φ~A e rilascia un valore rappresentante la similitudine tra gli autovettori relativi a due forme modali. Se le due forme modali sono ben correlate il MAC tende all’unità, mentre altrimenti tende a 0. E’ stato così possibile escludere le forme modali che maggiormente si distaccavano dalle altre.
-4.00E-01 -2.00E-01 0.00E+00 2.00E-01 4.00E-01 6.00E-01 8.00E-01 1.00E+00 1.20E+00 0 5 10 15 20 25 30 35 40 45 50 run1m run1v run2m run2v run3m run3v run4m run4v run5m run5v run6m run6v run7m run7v run8m run8v run9m run9v run10m run10v run11m run11v
Figura 3.23 : Esempio di ambientale da trattare con il MAC .
Così facendo si è giunti alla valutazione di una sola forma modale per ogni configurazione e si è potuto così passare alla fase successiva che prevedeva il “montaggio” della deformata globale.
Ovviamente non per tutte le forme modali così identificate, è stato possibile estenderle a scala globale. Questo a causa di diversi fattori, fra cui il fatto che molte delle forme trovate rappresentavano comportamenti locali e quindi non estendibili a priori.
3.6.1 Risultati locali
A titolo di esempio sono riportate di seguito le forme modali relative alla configurazione numero 8 (figura 3.24) che è stata quella sulla quale sono stati trovati risultati molto chiari e un buon numero di forme .
8
1,2 3,4 5,6 7,8 9,10
8
7,8
9,10
Figura 3.24 : L’ambientale 8 .
Le frequenze ed i relativi smorzamenti trovati nell’ambientale in questione sono i seguenti : • Hz = 2.88, ζ = 6.38 % (figure 3.25 , 3.26 , 3.27) • Hz = 4.17, ζ = 2.33 % (figure 3.28 , 3.29 , 3.30) • Hz = 7.45, ζ = 4.16 % (figure 3.31 , 3.32 , 3.33) • Hz = 10.40, ζ = 8.06 % (figure 3.34 , 3.35 , 3.36) • Hz = 11.15, ζ = 1.56 % (figure 3.37 , 3.38 , 3.39) • Hz = 12.71, ζ = 5.01 % (figure 3.40 , 3.41 , 3.42) • Hz = 15.37, ζ = 3.26 % (figure 3.43 , 3.44 , 3.45) • Hz = 19.89, ζ = 2.20 % (figure 3.46 , 3.47 , 3.48) • Hz = 35.02, ζ = 1.56 % (figure 3.49 , 3.50 , 3.51) • Hz = 37.52, ζ = 2.70 % (figure 3.52 , 3.53 , 3.54)
Di seguito sono riportate una ad una mostrandole prima e dopo averle trattate con il MAC . Hz = 2.88, ζ = 6.38 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.25 : Ambientale 8 : Hz = 2.88, ζ = 6.38 % (il segmento verticale indica il vincolo)
Si possono notare le 12 letture fatte, fra le quali è stato necessario trovarne una media che però non considerasse eventuali forme troppo lontane dalla stessa .
Si è dunque proceduto a ridisegnarla in modo da poterla commentare e quindi catalogare in forma di tipo flessionale, torsionale o ibrida, cioè con tratti in flessione e tratti in torsione .
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.26 : Ambientale 8 : Hz = 2.88, ζ = 6.38 % trattata con MAC.
Figura 3.27 : Ambientale 8 : Hz = 2.88, ζ = 6.38 % .
Si nota che la forma modale individuata è quasi puramente flessionale, fatta eccezione per una modesta quota torsionale presente sull’impalcato della secondaria, come evidenziato in rosso. Si nota che in questo caso sia la trave principale che la secondaria si inflettono.
Hz = 4.17, ζ = 2.33 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.28 : Ambientale 8 : Hz = 4.17, ζ = 2.33 % (il segmento verticale indica il vincolo)
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.30 : Ambientale 8 : Hz = 4.17, ζ = 2.33 % .
Questa forma è di tipo puramente flessionale, non si riscontrano infatti quote di torsione. Si nota che in questo caso la sia la trave principale che la secondaria si inflettono.
Hz = 7.45, ζ = 4.16 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.32 : Ambientale 8 : Hz = 7.45, ζ = 4.16 %, trattata con il MAC .
Figura 3.33 : Ambientale 8 : Hz = 7.45, ζ = 4.16 %.
In questo caso c’è compresenza di flessione e torsione. La flessione inflette la trave
principale, mentre la secondaria subisce torsione, evidenziata in rosso, e una flessione che la inflette formando tre convessità.
Hz = 10.40, ζ = 8.06 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.34 : Ambientale 8 : Hz = 10.40, ζ = 8.06 % (il segmento verticale indica il vincolo)
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.36 : Ambientale 8 : Hz = 10.40, ζ = 8.06 % .
Questa forma è flessionale solo sulla trave principale che viene inflessa causando una sola concavità, la secondaria invece non subisce inflessione e resta praticamente rettilinea.
Hz = 11.15, ζ = 1.56 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.38 : Ambientale 8 : Hz = 11.15, ζ = 1.56 %, trattata con MAC .
Figura 3.39 : Ambientale 8 : Hz = 11.15, ζ = 1.56 % .
Questa forma di tipo flessionale sulla secondaria, dove infatti si può notare una concavità, mentre diventa torsionale sulla principale, come evidenziato in rosso.
Hz = 12.71, ζ = 5.01 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.40 : Ambientale 8 : Hz = 12.71, ζ = 5.01 % (il segmento verticale indica il vincolo)
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.42 : Ambientale 8 : Hz = 12.71, ζ = 5.01 % .
Forma di tipo puramente flessionale: sulla principale si ha una convessità, in mezzeria, e una concavità, nel tratto fra vincolo e vincolo con la secondaria, nella quale si ha una concavità e basta. Hz = 15.37, ζ = 3.26 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.44 : Ambientale 8 : Hz = 15.37, ζ = 3.26 %, trattata con MAC .
Figura 3.45 : Ambientale 8 : Hz = 15.37, ζ = 3.26 % .
Forma di tipo flessionale, più accentuata sulla secondaria, dove la concavità è più marcata che sulla principale. Si nota la presenza di una piccola quota torsionale sul tratto vincolo-vincolo secondaria evidenziato in rosso.
Hz = 19.89, ζ = 2.20 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.46 : Ambientale 8 : Hz = 19.89, ζ = 2.20 % (il segmento verticale indica il vincolo)
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.48 : Ambientale 8 : Hz = 19.89, ζ = 2.20 % .
Forma con modo torsionale, caratterizzato da un ventre torsionale evidenziato in rosso, per quanto riguarda la secondaria, mentre per la primaria si ha un comportamento di tipo flessionale evidenziato da una accentuata convessità.
Hz = 35.02, ζ = 1.56 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.50 : Ambientale 8 : Hz = 35.02, ζ = 1.56 %, trattata con MAC .
Figura 3.51 : Ambientale 8 : Hz = 35.02, ζ = 1.56 % .
Forma di tipo puramente torsionale si possono infatti contare 5 ventri torsionali caratterizzati dalle sezioni evidenziate in rosso.
Hz = 37.52, ζ = 2.70 % -1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.52 : Ambientale 8 : Hz = 37.52, ζ = 2.70 % (il segmento verticale indica il vincolo)
-1.5000 -1.0000 -0.5000 0.0000 0.5000 1.0000 1.5000 175.0000 180.0000 185.0000 190.0000 195.0000 200.0000 205.0000 210.0000 215.0000 220.0000
Figura 3.54 : Ambientale 8 : Hz = 37.52, ζ = 2.70 % .
Anche questa ultima forma è di tipo puramente torsionale, più accentuata sulla secondaria che sulla principale. Si possono comunque contare anche in questa forma modale 5 ventri torsionali, caratterizzati dalle sezioni evidenziate in rosso.
3.6.2 Risultati globali
Una volta eseguito, quanto sopra, per tutte le configurazioni, si è passati al montaggio del modello globale, sul quale è stato possibile trovare 3 forme modali qui di seguito riportate con i parametri che le caratterizzano, cioè frequenza e smorzamento .
Modo Frequenza Rapporto di
smorzamento Tipo di deformata
I 2.4 2.53 % Flessionale
II 7.1 2.88 % Flessionale
III 15.1 3.82 % Flessionale
Tabella 3.7 : Risultati analisi sperimentale . Di seguito si riportano le deformate modali trovate :
I Modo : f = 2.4 Hz
Questa deformata modale,come si può notare, è puramente flessionale se si esclude la parte centrale, relativa alla trave secondaria posta esattamente a metà struttura .
E’ possibile notare che la travata a metà struttura presenta una deformata di tipo torsionale. Questo sembra dovuto alla rottura di una piastra di appoggio (figura 2.6)
II Modo : f = 7.1 Hz
Figura 3.53 : Seconda deformata modale individuata, Hz 7.1, ζ =2.88 % .
Anche questa forma modale è quasi completamente di tipo flessionale e si presenta come un sinusoide a 21 ventri, mentre la prima ne aveva 11.
III Modo : f = 15.1 Hz
Figura 3.54 : Terza forma modale individuata, Hz 15.1, ζ =3.82 % .
L’ultima forma modale individuata è nuovamente di tipo flessionale, anche qui troviamo un numero di ventri maggiori che nel caso precedente, e in particolare un numero pari a 23 .
Bibliografia
[1] D. J. Ewins, Modal Testing: theory, practice and application. Engineering Dynamics Series, Research Study LTD, Baldock, Hertfoordshire, England, second edition edn., 2000. [2] K.F.Alvin, Structural Identification via State Space based system realization. Tesi per il conseguimento del titolo di Dottore di ricerca, College of Engineering, University of Colorado, Boulder, Colorado 80309, April 2003.
[3] L.Meirovitch, Elements of Vibration Analysis, McGraw-Hill Book Company, second edition, 1986.
[4] Nuno Manuel Mendes Maia e Julio Martins Montalvao Silva, Theoretical and
Experimental Modal Analysis. Research Studies press LTD, Baldock, Hertfoordshire, England,1997.
[5] McConnell, Vibration Testing: theory and practice, John Wiley &Sons, 1995.
[6] International Organization for Standardization (ISO), Methods for the Experimental
Determination of Mechanical Mobility, part.1: Basic Definition, part.2: Measurement using single-point tanslational excitation with an attached exciter, Part.3: Measurement of rotationalmobility, part.5: Measurement using single-point impact excitation with an exciter wich isnot attached to the structure.
[7] D.J.Ewins and J.Griffin, A state of the art assesment of mobility measurement techniques, Journal of Sound and Vibration, 78(2), pp.197-222, 1981.
[8] Ward Heylen, Stefan Lammens e Paul Sas, Modal analisys theory and testing. Department of Mechanical Engineering, Katholieke Universiteit Leuven, Lieuven, Belgium, 1995.
[9] Palle Andersen, Identification of Civil Engineering Structures using Vector ARMA Model. Tesi per il conseguimento del titolo di Dottore di Ricerca, Aalborg University. Department of Building Technology and Structural Engineering, Sohngaardsholmsvej 57, DK-9000 Aalborg, Denmark, May 1997.
[10] E. Cecchi, Analisi sperimentale dinamica del viadotto Canal Piccinino a Carrara, Tesi di Laurea, Università di Pisa, Luglio 2005.
[11] Francesco Martinez y Cabrera, Carmelo Gentile, Piergiorgio Malerba (a cura di),Ponti e viadotti:
concezione,progetto,analisi,gestione.Atti dei corsi di aggiornamento , 29 giugno-3 luglio 1998. Pitagora
Editrice, Bologna, 2000