CAPITOLO 1
Il Progetto SPADA
Il lavoro svolto in questa tesi fa parte di un progetto più ampio volto al miglioramento delle potenzialità dei telescopi terrestri, sì affetti da problemi dovuti ai disturbi atmosferici, ma anche con notevoli vantaggi rispetto a telescopi spaziali quali ad esempio l’Hubble Telescope.
Il progetto SPADA (Single Photon Avalanche Diode Array) sfrutta i notevoli vantaggi introdotti dal sensore SPADA, sviluppato dal Politecnico di Milano, rispetto ai sensori comunemente usati quali i CCD (Charge Coupled Device), i PMT (Photo Multiplier Tube) e gli ADPs (Avalance-Photon Diodes) che non solo hanno un consumo maggiore di potenza ma offrono anche minori prestazioni a livello di sensibilità.
La parte svolta dal dipartimento di Ingegneria dell’Informazione dell’Università di Pisa riguarda lo sviluppo di tre applicazioni astronomiche, Fast Transient Imaging (FTI), Adaptive Optics (AO) e Layer Sensing (LS), che possono trarre grandi vantaggi dall’utilizzo dei sensori suddetti. Per il loro funzionamento è stato necessario costruire dell’hardware apposito, in parte già testato, in parte in fase di collaudo. La parte hardware relativa alla Scheda Audio, necessaria per l’applicazione di AO, è stata sviluppata e testata durante il lavoro di questa tesi. Inoltre, è stato testato intensivamente l’intero hardware del progetto, in particolare i Ricevitori, affetti in origini da problemi nella sezione di alimentazione e di cross-talk nel conteggio dei fotoni.
1.1 Le tre applicazioni astronomiche
1.1.1 Fast Transient Imaging
Il Fast Transient Imaging è volto alla rilevazione di eventi luminosi che si sviluppano con transitori veloci. Alcuni esempi, per i quali un suo utilizzo è sicuramente importante, sono il decadimento della fluorescenza, la caratterizzazione delle fibre ottiche, lo studio della portata dei laser. In pratica qualsiasi tipo di evento luminoso può sfruttare questa soluzione. Per quanto concerne il nostro lavoro, l’uso del Fast Transient Imaging è molto utile per lo studio di eventi astronomici che si sviluppano velocemente nel tempo quali lo scoppio di supernovae o di novae, l’emissione di impulsi dalle pulsar, l’osservazione di stelle variabili come
nane bianche e stelle di neutroni [1].
Una supernova è una stella che esplode. L’esplosione di una supernova rappresenta l’ultimo atto, distruttivo e spettacolare, del ciclo evolutivo di una stella con una massa molto grande. Durante l’esplosione viene liberata un’energia enorme (anche superiore a 1026 Megatoni) e la
stella diventa così luminosa da splendere più di una intera galassia (Figura 1.1). La luce emessa dalla stella in seguito all’esplosione dura qualche mese ed è paragonabile a quella che il nostro Sole è in grado di emettere in un miliardo di anni [1].
Figura 1.1: La Supernova 1987A prima (a sinistra) e dopo l'esplosione (a destra).
Per quanto riguarda le novae, queste derivano da esplosioni di nane bianche. Si verifica un’esplosione degli strati superficiali della stella che espelle materia in maniera molto rapida. Un esempio è mostrato in Figura 1.2, Nova Cygni 1992, che si trova a circa 10000 anni luce nella costellazione del Cigno, prima e dopo l’esplosione. L’anello nell’immagine di destra rappresenta la massa espulsa.
Figura 1.2: Nova Cygni 1992 prima e dopo l’esplosione.
La pulsar, invece, acronimo di PULSAting Radio source (sorgente di impulsi radio) è una stella di neutroni in rapida rotazione che emette fasci
di onde radio. La velocità di rotazione della pulsar determina l'estrema regolarità e la frequenza degli impulsi che può variare da un minimo di 1,5 ms a qualche secondo di intervallo tra uno e l'altro. Al centro della nebulosa del Granchio si trova la pulsar del Granchio, una stella di neutroni (resto di supernova) con un diametro di circa 10 chilometri, scoperta nel 1969. La pulsar del Granchio compie una rotazione in 33 ms, cioè compie 30 giri al secondo, e i fasci di radiazione emessi interagiscono con i gas della nebulosa producendo complesse figure di fluorescenza (Figura 1.3).
Figura 1.3: Pulsar del Granchio, al centro della nebulosa. Da notare l’emissione di luce evidenziata dall’interazione con i gas della nebulosa.
Quindi per l’osservazione di fenomeni come quelli suddetti, caratterizzati da impulsi brevi di energia (supernovae) o di luce (pulsar), è necessario l’uso di strumenti estremamente sensibili come appunto il Fast Transient Imaging.
1.1.2 Ottica Adattiva
L’Ottica Adattiva (AO) è una delle moderne tecniche utilizzate dai telescopi terrestri per contrastare l'effetto dell'atmosfera che degrada le immagini, riducendo di fatto il potere risolutivo del telescopio a valori molto inferiori al limite diffrattivo (vedi Appendice) (Figura 1.4). La ragione principale risiede nell’incontro di aria calda e fredda nell’atmosfera; il problema è analogo a quello che si riscontra se si osserva una strada colpita dal sole in estate: l’immagine immediatamente sopra il suolo non è ben definita; di solito si parla di “miraggio”.
Figura 1.4: Effetto dell’atmosfera sul fronte d’onda.
La conoscenza della forma effettiva del fronte d'onda permetterebbe, tramite un sistema di specchi deformabili, di recuperare una forma più simile a quella piana, precedente l'interazione con l'atmosfera, migliorando drasticamente la qualità dell'immagine (Figura 1.5).
Questa è l'idea che sta alla base del principio di funzionamento delle ottiche adattive, la cui reale implementazione richiede tuttavia accorgimenti tecnici complessi e una o più sorgenti guida. Tali difficoltà rendono questa tecnica relativamente costosa e quindi non alla portata di
tutti gli osservatori, anche se sicuramente permette di risparmiare molto rispetto ai costi di una missione satellitare o su pallone, uniche soluzioni possibili in passato per evitare l’effetto di “blurring” dell’atmosfera.
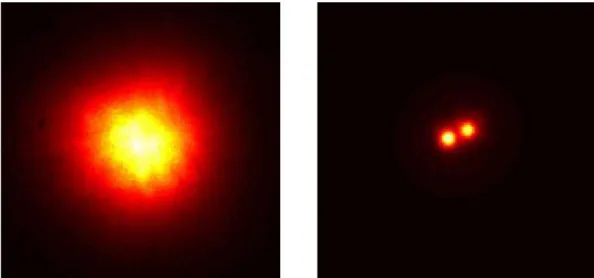
Figura 1.5: L’immagine, ottenuta con il sistema MACAO-VLTI alla lunghezza d’onda di 2.2µm, mostra la stella HIC 59206 prima (a sinistra)
e dopo (a destra) l’accensione del sistema di ottica adattiva. L’immagine a destra rivela che l’oggetto è una stella binaria separata da 0,120 arcsec.
Un ulteriore esempio dei vantaggi nell’utilizzo dell’Ottica Adattiva è mostrato in Figura 1.6. Da notare come la terza immagine sia la più definita delle tre e, in particolare, di quella acquisita col telescopio Hubble che non risente della diffrazione atmosferica. La questione è che oltre al fatto di non essere facilmente raggiungibile, per ovvi motivi, l’occhio di tale telescopio è decisamente più piccolo di quello degli attuali telescopi terrestri, che raggiungono i 10 metri di diametro e oltre. Con questi sono infatti minori gli effetti dovuti alla diffrazione della luce entrante, come verrà esposto meglio nel Capitolo 2.
Tecniche di Ottica Adattiva sono utilizzate presso l’osservatorio di Keck nelle Hawai, nonché presso l’ESO mediante il sistema MACAO [1][2]. Una spiegazione più dettagliata del funzionamento di questa tecnica sarà fornita nel Capitolo 2.
Figura 1.6: Miglioramenti introdotti dall’AO nell’osservazione di Titano mediante diversi tipi di telescopi: a) telescopio terrestre convenzionale;
b) telescopio orbitante Hubble; c) telescopio dotato di un sistema di Ottica Adattiva.
1.1.3 Layer Sensing
Come ultima applicazione il progetto SPADA prevede il Layer Sensing [1][2]. Obiettivo di questa terza applicazione è quello di studiare i vari strati dell’atmosfera terrestre analizzandone da terra le caratteristiche ottiche (Figura 1.7).
Figura 1.7: Esempio di applicazione LS: rilevamento di corpi nuvolosi negli strati atmosferici a seguito dell’invio degli impulsi laser.
Per poter fare ciò, ad intervalli regolari viene inviato verso il cielo un impulso laser (Figura 1.8). Esso percorre in meno di 1 millisecondo
l’intera atmosfera, attraversandone i vari strati. Studiando in istanti successivi i fotoni di ritorno, si possono ricavare le caratteristiche ottiche, e quindi anche fisiche, dei diversi strati atmosferici (o layers).
Come accennato nel paragrafo precedente, il Layer Sensing è spesso usato per la creazione di stelle guida, molto utili per le applicazioni di Ottica Adattiva. In pratica si sfrutta l’interazione del raggio laser sparato nell’atmosfera che va ad interagire con gli atomi di sodio presenti ad un’altezza di circa 90 km, eccitandoli.
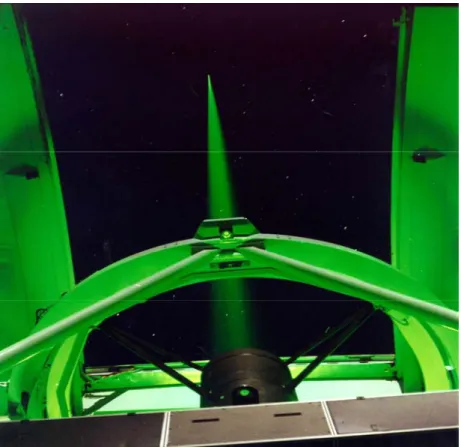
Figura 1.8: Test di lancio del maggio 2001 al telescopio William Herschel di un laser Rayleigh di 5 W con frequenza tale da produrre luce verde
con lunghezza d’onda di 523 nm.
Essendo una stella guida, il laser deve essere puntato verso la stella che si vuole osservare.
Esempi di applicazioni di Layer Sensig possono essere attualmente ritrovati negli esperimenti svolti presso l’installazione telescopica William Herschel sull’isola La Palma, nelle Canarie, da un team dipendente dall’inglese University of Durham.
1.2 Il Sensore “SPADA”
Lo sviluppo delle tre tecniche suddette beneficia dei notevoli vantaggi introdotti dal sensore SPADA. Il sensore, non è altro che un array di sensori SPAD (Single-Photon Avalanche Diode). Sensori di questo tipo sono alla base delle tecniche di photon counting necessarie per effettuare misure accurate di segnali ottici deboli o di impulsi luminosi brevi.
Un sensore SPAD è fondamentalmente una giunzione p-n polarizzata inversamente al di sopra della sua tensione di breakdown, al di sotto della quale si genera il cosiddetto fenomeno della “moltiplicazione a valanga” dei portatori di carica. Tale fenomeno è dovuto al fatto che, a causa del forte campo elettrico presente nel volume della zona di svuotamento di una giunzione p-n polarizzata in inversa, a seguito dell’iniezione o della generazione di un portatore di carica viene conferita allo stesso una forte accelerazione e quindi un’energia sufficiente a rompere i legami degli altri portatori all’interno del reticolo cristallino generando nuove coppie elettrone-lacuna. Di conseguenza si instaura un meccanismo a catena che si risolve nel passaggio di un’intensa corrente attraverso il dispositivo.
I sensori di questo tipo finora in commercio hanno caratteristiche poco performanti sia dal punto di vista delle tensioni di utilizzo (300-400 V) sia dal punto di vista dei consumi, con una potenza di picco pari circa a 8 W e un’energia dissipata per impulso pari circa a 10 nJ [1][2]. I Sensori
SPAD progettati a Milano invece, funzionano con una tensione di
alimentazione di circa 30 V. Inoltre le dimensioni di questi dispositivi sono estremamente ridotte (18x18 mm) con diametri delle aree attive (4 per ogni
SPAD) che variano da 20 µm a 75 µm [3].
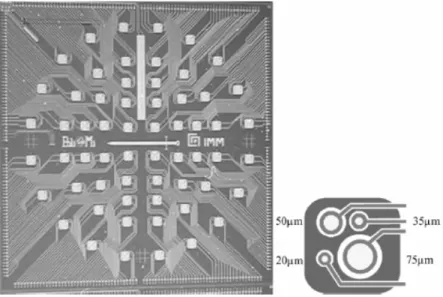
Le dimensioni raggiunte nella realizzazione dei circuiti hanno portato a sviluppare piuttosto che un singolo sensore, una matrice o array (SPADArray) degli stessi, capaci di rilevare un maggior numero di radiazioni luminose. In Figura 1.9, a sinistra, è possibile osservare la disposizione dei singoli SPAD sul sensore.
Figura 1.9: Struttura del sensore SPADA: a sinistra l’array di 60 pixel costituente l’intero sensore; a destra una schematizzazione del singolo
pixel con le quattro aree attive di dimensioni diverse, filabili singolarmente.
A destra è mostrata la struttura di un singolo SPAD: da notare in particolare la disponibilità di quattro aree attive di dimensioni diverse. Più l’area è grande più fotoni riuscirà ad acquisire. Essendo filati direttamente, è possibile scegliere una sola delle 4 aree attive in fase di routing del sensore. In Figura 1.10 è mostrato il sensore SPADA costruito dal Politecnico di Milano.
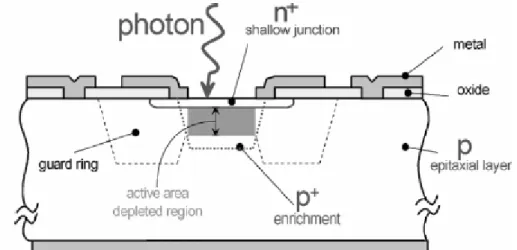
Vediamo adesso più in dettaglio il principio di funzionamento del sensore. Abbiamo detto che il diodo è al limite del breakdown. Scendendo ancora, nel dispositivo passerà una corrente, rilevando l’arrivo di un fotone. In Figura 1.11 è mostrata la sezione del sensore e la zona di ricezione dell’energia, rappresentata dal fotone. Una diffusione p+ definisce l’area attiva; la regione sottostante a drogaggio p intorno allo strato superficiale n+ serve come anello di guardia, prevenendo breakdown indesiderati [3].
Figura 1.11: Sezione di un sensore SPAD: da notare la planarità del
dispositivo.
Una volta innescata la reazione suddetta, è necessario riportare il sensore allo stadio iniziale di pre-breakdown, in modo che sia in grado di rilevare un nuovo fotone. Per far questo si sfrutta un circuito apposito, esterno al sensore, denominato AQC (Active Quenching Circuit) il quale inverte la polarizzazione della giunzione non appena si ha l’inizio del passaggio di corrente nel diodo. Il circuito provvede anche a trasformare l’impulso di corrente in un impulso di tensione ottenendo così un’uscita digitale.
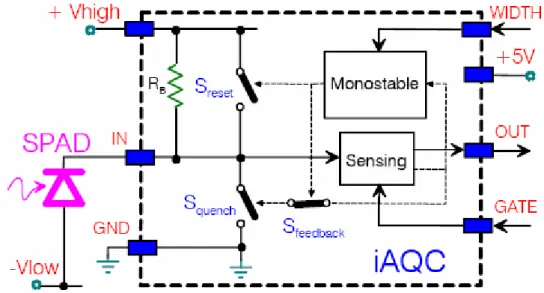
In Figura 1.12 è mostrato lo schema a blocchi del sistema Sensore-AQC. Dopo l’arrivo di un fotone il sensore non è sensibile a nuovi stimoli
luminosi per un lasso temporale detto hold-off time in cui il circuito di quenching riporta la giunzione allo stato iniziale.
Figura 1.12: Schema del circuito di Active Quenching.
Lo SPADA viene polarizzato tra una tensione positiva Vhigh e una
negativa Vlow. Vlow è leggermente inferiore alla VB di breakdown (che nel caso del sensore SPADA è di 23 V): tipicamente Vlow ≈VB−1V . E la
differenza Vhigh−Vlow è più grande della VB di una quantità pari alla sovratensione desiderata [3]. Quando viene assorbito un fotone, Squench
manda a massa il potenziale d’ingresso (IN in Figura 1.12), spegnendo lo
SPAD. Dopo il tempo di hold-off, stabilito dal monostabile, Sreset viene
attivato in modo da riportare il sensore nella condizione iniziale così da rilevare nuovi arrivi di fotoni.
Tali circuiti sono detti iAQC ovvero di integrated Active Quenching
Circuit, in virtù del fatto che sono stati realizzati come ASIC. Le
1.3 Specifiche del Progetto SPADA
Nelle specifiche di progetto è richiesto che il sistema permetta la realizzazione delle tre applicazioni, descritte in precedenza. Inoltre, vista la velocità necessaria per il corretto funzionamento, nonché la quantità di informazioni che devono essere immagazzinate, anche la gestione del software deve essere particolarmente attenta ed intelligente.
1.3.1 Fast Transient Imaging
Nell’applicazione di Fast Transient Imaging (FTI) è importante acquisire l’immagine a 60 pixel fornita dal sensore SPADA ogni finestra di integrazione temporale Tw, di durata impostabile dall’utente in un intervallo compreso tra 10 µs e 100 ms con una risoluzione di 14 bit. Finestre temporali brevi permettono una scansione temporale del flusso di fotoni incidente con risoluzione più che sufficiente per la maggior parte delle applicazioni astronomiche. L’immagine rappresenta il numero di fotoni rilevati da ciascun pixel e contati dalla scheda nella finestra temporale; quindi ogni periodo Tw i 60 conteggi effettuati devono essere trasmessi al computer remoto tramite FireWire.
Ogni contatore deve essere di almeno 16 bit con saturazione (ovvero il conteggio deve fermarsi quando è stato raggiunto il valore FFFFhex). In questo modo la saturazione si avrà per finestre Tw superiori a
3,3 ms, a causa del conteggio massimo teorico di 20 Mcps (Mega counts per second) permesso dagli iAQC (il cui tempo minimo di hold-off è 50 ns). L’utente può quindi decidere di ridurre le finestre di integrazione migliorando così anche le performance dell’acquisizione rispetto alla scansione temporale [4]. Una logica di timing e controllo salva, ogni Tw secondi, il contenuto di ogni contatore in un corrispondente registro di appoggio: in questo modo nessun fotone verrà perduto dal conteggio. Il
contenuto dei 60 registri di appoggio viene passato all’uscita tramite FireWire. La scelta di questo collegamento è dovuta alla sua velocità, che garantisce il massimo bit rate necessario per l’elaborazione in tempo reale. Naturalmente il collegamento FireWire serve anche per il passaggio dei parametri necessari all’acquisizione, ovvero la finestra Tw e i segnali di Gate e Interlock con i quali è possibile accendere e spegnere gli iACQ o l’intero sensore SPADA (attraverso la Detection Board) per mezzo del computer remoto [4].
1.3.2
Ottica Adattiva
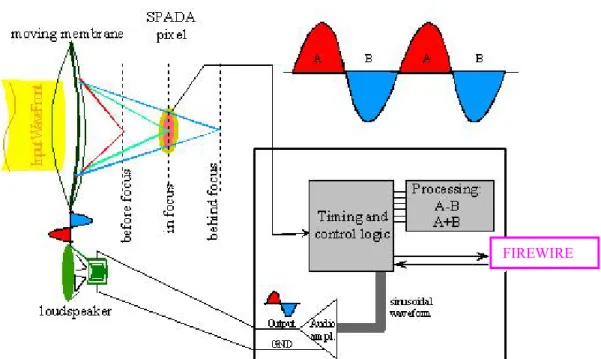
Per quanto riguarda la parte relativa all’Ottica Adattiva è possibile far riferimento alla Figura 1.13.
Figura 1.13: AO nel progetto SPADA.
Una serie di registri conta i fotoni nei semiperiodi A e B. Dopo ogni periodo i conteggi effettuati vengono processati per effettuare il controllo. Nel frattempo il conteggio prosegue incrementando la coppia di registri
successiva. La fase di processing prevede il calcolo del segnale di curvatura C, definito come:
A B C A B − = + (1.1)
L’immagine sarà perfettamente a fuoco se C = 0.
Vediamo di capire meglio come viene calcolata questa grandezza. Per il calcolo del segnale di curvatura si sfrutta una sinusoide, i cui parametri (ampiezza, frequenza e fase) sono impostabili dall’utente. L’ampiezza ha una risoluzione di 8 bit. La frequenza, su 32 bit, è impostabile in un range compreso tra 1,5 kHz e 3 kHz, con risoluzione di 1 Hz, mentre la fase può variare su tutto l’angolo giro con passi di 1°. La sinusoide fa muovere una membrana riflettente che regola il piano focale del flusso di fotoni incidenti sul sensore SPADA (che ne effettua il conteggio). I parametri A e B rappresentano rispettivamente i fotoni contati nella semionda positiva e quelli contati nella semionda negativa. La messa a fuoco, come si evince dalla Figura 1.13, si ha quando il numero di fotoni contati nei due semiperiodi è uguale.
La logica di controllo deve alternativamente abilitare (secondo una tempistica dettata dalle considerazioni esposte nel Capitolo 2, e descritta nel Capitolo 4) i contatori corrispondenti ai semiperiodi A e B, continuando a contare per un numero intero di periodi della sinusoide impostabile dall’operatore nel range tra 1 e 256. Ne consegue che l’intero intervallo di conteggio sarà compreso tra un minimo di 1 333 µs
3000 Ηz = ed un massimo di 256 171 ms
1500 Hz = . Come per l’applicazione FTI, sono utilizzabili contatori almeno a 16 bit, ed anche la logica aritmetica che calcolerà il segnale di curvatura dovrà fornire un risultato su 16 bit.
Anche in questo caso il collegamento FireWire soddisfa pienamente le nostre esigenze: dovendo infatti fare l’upload dei 60 segnali di
curvatura, il massimo data rate necessario è di 20 canali * 16 bit = 3 Mbps
333 µs .
Qualora volessimo trasmettere anche il contenuto di A e B il nostro data-rate salirebbe a 3 * 3 Mbps ovvero 9 Mbps, comunque raggiungibili col collegamento scelto [4].
Tecniche di Ottica Adattiva sono già in uso in vari osservatori, in particolare presso l’ESO, con cui l’Università di Pisa collabora con il progetto SPADA, il cui sistema è denominato MACAO (Multi-Application Curvature Adaptive Optics). Il sistema descritto in questa tesi va a sostituire il modulo relativo al calcolo del segnale di curvatura ed inoltre ha caratteristiche tali da poter gestire in futuro anche la parte attuativa della correzione, ovvero la deformazione dello specchio secondo i segnali di curvatura calcolati (vedi Capitolo 2). Come esposto in [6], il sistema MACAO risulta, però, molto ingombrante nel suo complesso (4 armadi per quanto riguarda la parte elettronica!) a differenza del nostro sistema che invece è costituito da un hardware di gestione contenuto in una semplice unità rack a 19 pollici (vedi Paragrafo 1.4).
Oltre alle migliorie introdotte dal sensore SPADA, è necessario che il sistema atto alla ricezione e gestione dei dati acquisiti non vanifichi la precisione del sensore stesso: questo è stato un obiettivo perseguito con impegno, in quanto risulta fondamentale per tutte e tre le applicazioni del progetto ed in particolare per quella di Ottica Adattiva. Per il conteggio dei fotoni infatti, è necessaria una notevole accuratezza, in modo che il controllo sull’immagine aberrata sia il più preciso possibile: la curvatura del fronte dipende, come vedremo in seguito, dal numero di fotoni incidenti sui singoli SPAD. Quindi il nostro obiettivo è stato lo sviluppo del sistema descritto poco sopra, il quale però, si basa sulla precisione dei conteggi di A e B dopo l’acquisizione da parte dei ricevitori: questi ultimi sono stati testati intensivamente e migliorati rispetto alla versione iniziale, in modo da garantirne un affidabile funzionamento (vedi Capitolo 3).
Oltre ad una compattezza maggiore rispetto al MACAO, il nostro sistema risulta anche più flessibile, nonché realizzabile a costi decisamente
inferiori. Quest’ultimo aspetto non è da trascurare, in quanto tutto l’hardware realizzato finora, può essere trasportato facilmente ed utilizzato anche da osservatori più piccoli (magari con budget disponibile inferiore) quale l’Osservatorio di Catania, con il quale infatti collaboriamo. Senza considerare il fatto che, utilizzando tensioni decisamente inferiori (30 V) rispetto ai sistemi usati attualmente, come il MACAO (300-400 V), il nostro sistema si presta particolarmente all’utilizzo anche a bordo di missioni spaziali [7].
1.3.3 Layer Sensing
Questa applicazione operativamente risulta un misto tra le precedenti, ma lo scopo questa volta è lo studio degli strati atmosferici per mezzo dell’analisi delle riflessioni a diverse quote, in seguito all’invio di un impulso laser.
Viene utilizzato un impulso laser con frequenza di ripetizione di 7 kHz. La scheda riceve un segnale di sincronizzazione (sempre con frequenza di ripetizione di 7 kHz), che segnala l’invio dell’impulso laser e mantiene il sensore SPADA spento per i successivi 2,5 µs (per mascherare la fluorescenza ottica dovuta all’elevata potenza dell’impulso). Trascorso questo tempo fissato, la scheda riaccende il sensore e inizia a memorizzare, per ciascuno dei 60 pixel, i conteggi dei fotoni che arrivano in 15 finestre temporali successive. Questa procedura viene ripetuta per un numero di volte definibile dall’utente. I dati acquisiti verranno trasmessi, nuovamente via FireWire ad un computer remoto; successivamente sarà possibile una nuova acquisizione. La scelta della FireWire, nuovamente, ci permette di ridurre i tempi di trasferimento in modo da poter realizzare più acquisizioni.
Ai fini di mantenere una buona focalizzazione si va a generare una sinusoide con le stesse caratteristiche di quella vista nello studio dell’Ottica Adattiva. La corretta sincronizzazione tra il laser, la
generazione della sinusoide e l’inizio della acquisizione garantisce il campionamento del raggio su differenti altezze con una risoluzione di 3,3 km su un range di strati atmosferici da 1 a 50 [4].
La parte relativa al Layer Sensing non è ancora stata sviluppata a questo punto del progetto.
1.3.4 Gestione del Sistema
In Figura 1.14 è mostrato lo schema a blocchi dell’intero progetto [3].
Figura 1.14: Architettura del Sistema SPADA.
Sulla cosiddetta Detection Board è montato il sensore con i relativi iAQC. La gestione dei segnali provenienti dalla Detection Board è affidata alla Data Processing Board il cui sviluppo e collaudo è affidato al dipartimento di Ingegneria dell’Informazione dell’Università di Pisa il cui lavoro è volto anche alla gestione dell’interfaccia col mondo esterno tramite un computer remoto, collegato alla Data Processing Board mediante link Firewire, in quanto è richiesta una notevole velocità nel
trasferimento dati. Per permettere un lavoro continuo del sistema anche a risoluzioni elevate, è necessario poter garantire un data-rate di 19,2 Mbps, in modo che i 60 contatori a 16 bit possano acquisire su finestre consecutive di 50 µs [5]. L’insieme di tutti i dati raccolti deve essere memorizzato, in real-time, in un hard disk e reso disponibile per un’analisi ad esperimento concluso.
Nello stesso tempo, una versione compressa dei dati acquisiti viene mostrata sullo schermo di un PC remoto in modo che l’utente possa verificare il corretto funzionamento della macchina e quindi dell’esperimento stesso. Questi dati sono ottenuti accumulando il conteggio dei fotoni su finestre di 100 ms. Sempre tramite PC remoto è possibile regolare tutti i parametri delle varie applicazioni sviluppate. In Figura 1.15 è mostrato lo schema a blocchi del sistema di acquisizione dati.
Figura 1.15: Architettura del sistema di acquisizione dei dati dalla Data-Processing Board.
L’approccio utilizzato è di tipo modulare in modo da poter controllare ogni singola sezione indipendentemente dalle altre. Da una parte, un sistema basato su FPGA e DSP, descritto nel Paragrafo 1.4.6,
implementa il conteggio dei 60 canali ed esegue in real-time le operazioni necessarie sull’ acquisizione dei dati, ovvero l’accumulo del conteggio su finestre da 100 ms come detto in precedenza [5]. Secondariamente poi, un sistema Linux, connesso alla Data-Processing Board mediante Firewire provvede al conteggio e alla memorizzazione delle risorse necessarie affinché il sistema possa trasmettere un flusso continuo dei dati durante tutto l’esperimento [5]. In particolare, il sistema Linux agisce da server per i dati. Infatti, essendo le finestre di acquisizione di 50 µs, che rendono necessario un data-rate di 19,2 Mbps, è necessario uno spazio di 8,64 GB per ogni ora di osservazione. Tali velocità si riescono a raggiungere con gli attuali hard disk in commercio purché la macchina atta a tale scopo, esegua solo questo [5]. Il sistema Linux funziona anche come server TCP/IP, in modo che l’utente possa controllare i 60 contatori mediante un’interfaccia LabView presente sul PC remoto.
Coerentemente con l’architettura descritta, anche il software relativo è strutturato su vari strati in modo da garantire al sistema una più ampia flessibilità nonché portabilità (Figura 1.16).
Figura 1.16: Struttura a strati del sistema di acquisizione dati.
Ogni stadio aggiunge alcune applicazioni specifiche necessarie all’array di 60 contatori, il quale è completamente implementato via hardware dall’FPGA. Come descritto in Figura 1.16 invece, il DSP
provvede all’analisi in tempo reale dei dati e alla comunicazione verso i livelli superiori [5].
1.4 Hardware del Progetto SPADA
Come detto in precedenza, il lavoro svolto in questa tesi continua quello svolto in precedenza da altri [1][2], che ha portato alla realizzazione dell’hardware per la gestione elettronica dell’intero progetto SPADA. In questo paragrafo verranno esposte le varie schede finora realizzate, lasciando la descrizione della Scheda Audio (parte fondamentale per il lavoro di questa tesi) ed il testing dell’intero sistema al Capitolo 3.
1.4.1 Il Rack
Come consuetudine negli strumenti di misura, si è scelto un rack a 19” per ospitare tutte le schede (Figura 1.17).
Figura 1.17: Chassis Rack da 19" con tutte le schede montate.
Lo chassis è stato fornito da ESO ed è dotato di tre alimentatori indipendenti. Per le applicazioni della Data Processing Board, utilizziamo
quello che fornisce 12 V ed 80 W. Serve infatti una discreta potenza per la Scheda Audio, la cui uscita deve andare a pilotare gli attuatori dello specchio deformabile. Gli altri due alimentatori sono per l’alimentazione del sensore SPADA.
1.4.2 Ricevitori
La prima cosa da realizzare sono state le schede per il collegamento tra la Detection Board e la Data-Processing Board. La ricezione dei segnali differenziali avviene mediante una coppia di cavi SCSI a 68 pin. Tali schede sono dotate, quindi, di ricevitori differenziali che operano la conversione in single ended dei segnali e le cui uscite sono direttamente connesse alla Data Processing Board. I segnali che arrivano sono re-diretti sul Back Panel (descritto in seguito) che li distribuisce alle altre schede. I ricevitori montati sono gli AM26LV32i di Texas Instruments (Figura 1.18).
Figura 1.18: Scheda dei Ricevitori. In alto a destra l’aggiunta della parte dedicata al raffreddamento.
Le prestazioni delle schede sono state migliorate durante questa tesi, in quanto presentavano problemi di dissipazione di potenza nella
sezione del regolatore serie (MC33269) e di cross talk tra i canali. Nel Capitolo 3 verranno esposte meglio le modifiche apportate a tale scheda.
1.4.3
GPIO
La scheda GPIO (General Purpose Input Output) è dedicata all’invio e alla ricezione dei segnali di Gate e Interlock descritti in precedenza.
Figura 1.19: Scheda GPIO.
Come mostrato in Figura 1.19 sono presenti 8 connettori coassiali SMC: quattro sono usati per i segnali suddetti; i restanti quattro sono stati aggiunti per applicazioni future, in modo da rendere più flessibile l’impiego dell’intera macchina.
1.4.4 Power Supply Board
La Power Supply Board fornisce, a partire dai 12 V presenti sul Back Panel i 5 V necessari alla Data Processing Board e, tramite un
convertitore DC/DC i livelli di tensione pari a ±15 V necessari per l’alimentazione del chipset IEEE1394 presente sulla scheda Orsys.
L’intefacciamento tra la Power Supply Board e la Data Processing Board è garantito dal connettore micro-line® tipico delle schede Orsys
(cuore dell’intero progetto e descritta in seguito) i cui pin permettono un accesso diretto alle risorse della scheda stessa. Tali connettori sono inoltre studiati in modo da consentire l’affiancamento di altre schede dotate dello stesso tipo di risorsa semplicemente impilandole l’una sopra l’altra.
In Figura 1.20 è mostrata la scheda.
Figura 1.20: Power Supply Board. Da notare i connettori microline®.
1.4.5 Back Panel
Il Back Panel (Figura 1.21), oltre a fornire l’alimentazione a tutte le schede, distribuisce i segnali provenienti dalla Detection Board alle schede che ne hanno bisogno. Inoltre permette la comunicazione tra le schede della Data Processing Board stessa. È costituito da 5 connettori DIN ognuno da 96 ingressi disposti su tre file da 32 pin. I dati provenienti dai ricevitori sono instradati su 30 piedini delle file esterne (ogni scheda
ricevitore infatti, gestisce 30 canali dello SPADA). I pin centrali sono invece utilizzati dalle altre schede per instradare i dati da e per il DSP o l’FPGA.
Figura 1.21: Il Back Panel.
1.4.6 Data Processing Board Orsys CPT6713
Il cuore del progetto SPADA sviluppato dall’Università di Pisa è la scheda C6713Compact prodotta da Orsys, mostrata in Figura 1.22.
La scheda svolge tutti i calcoli necessari ad espletare le funzioni delle tre applicazione del progetto. Inoltre gestisce l’invio dei risultati al PC remoto e la ricezione dei comandi tramite FireWire. Come si vede in Figura, la scheda è caratterizzata dai connettori microline, caratteristici delle schede Orsys, descritti in precedenza.
Figura 1.22: Data Processing Board C6713Compact.
La Figura 1.23 mostra lo schema a blocchi della scheda. L’elaborazione dei dati è affidata al DSP (Digital Signal Processing) Texas Instruments TMS320C6713. Tra gli altri elementi presenti è da notare l’FPGA Xilinx Virtex-II XC2V1000 da 1 MGate.
Gli altri elementi sono:
• Un PLD (Programmable Logic Device) sul quale sono implementati dei registri di configurazione della scheda.
• Chipset LLC (Link Layer Controller) e PHY (Physical Transceiver) per la gestione del trasferimento dati attraverso le due porte FireWire IEEE1394-1995.
• Chip UART TL16C550 per la gestione della comunicazione seriale secondo lo standard RS-232.
• 32 Mbyte di memoria EEPROM • 64 Mbyte di memoria SDRAM • Connettore JTAG
• Sensore di temperatura
Per l’applicazione di Ottica Adattiva si è sfruttato principalmente il DSP, in particolare la parte relativa alla McASP (Multi-channel Audio Serial Port), fondamentale per la generazione della sinusoide, e che verrà descritta in seguito [2].