Capitolo II
METODI DI STIMA SPETTRALE
2.1 - Introduzione
Lo stato del mare può essere caratterizzato statisticamente mediante lo spettro delle onde, che descrive la densità spettrale di potenza (DSP) in funzione del numero d’onda. Varie analisi di immagini prodotte da radar ad apertura sintetica hanno dimostrato la possibilità di ottenere mediante opportune elaborazioni gli spettri della varianza dell’altezza delle onde marine e, quindi, di poter risalire all’altezza significativa, alla lunghezza ed alla direzione di propagazione delle onde stesse. Il problema di base resta quello di stabilire la relazione che lega la varianza dell’intensità dell’immagine SAR alla varianza dell’altezza delle onde. Tale relazione, in generale di tipo non lineare, può essere espressa nella forma proposta in [6], [7]:
( )
( )
( )
i SAR w w
S k =F S k , k S k (2.1)
nella quale S kw
( )
ed S ki( )
rappresentano rispettivamente lo spettro della varianza dell’altezza significativa della superficie marina e quello della varianza dell’intensitàdell’immagine SAR. Sempre nella (2.1), FSAR
[ ]
⋅ indica la trasformazione, in generale dipendente dal numero d’onda e dallo spettro S kw( )
.Nel seguito discuteremo due metodi, comunemente utilizzati in letteratura, che permettono di risalire allo spettro marino da quello della corrispondente immagine SAR. Il primo metodo si basa sull’ipotesi di linearità della relazione (2.1); l’altro utilizza invece una tecnica iterativa, che si rende necessaria per tenere conto della non linearità della trasformazione.
2.2 - SAR imaging delle onde del mare
In accordo con la trattazione descritta in [8], la (2.1) può essere ricondotta, nell’ambito di un’approssimazione lineare, alla seguente espressione:
( )
( ) ( )
2( )
2( )
( )
( )
i st SAR w st noise
S k =H k
γ
k T k S k +H k S k (2.2)In particolare, il termine Hst
( )
k viene definito risposta stazionaria del sistema SAR. Esso descrive l’attenuazione che la risposta globale del sistema introduce relativamente alle componenti dello spettro marino caratterizzate da numeri d’onda elevati. Questo termine, riconducibile alla risoluzione finita del sistema SAR, unitamente al termine Snoise( )
k , che tiene conto del rumore di tipospeckle caratteristico dei sistemi radar coerenti, viene solitamente trascurato nei
modelli teorici ma deve essere considerato quando si elaborano dati reali.
Il fattore γ2
( )
k , utilizzato di fatto solo da alcuni autori (si veda ad esempio[9]), è noto con il nome di funzione di coerenza e rappresenta un parametro empirico, usato nelle applicazioni per tenere conto di possibili meccanismi indesiderati, non semplicemente descrivibili in modo rigoroso, che fanno perdere di univocità alla relazione tra spettro di mare e corrispondente spettro di intensità dell’immagine SAR. In particolare, se γ2
( )
k =0 tali spettri non sono tra loro correlati, mentre se( )
2 k 1
γ = c’è coerenza totale. Nel seguito e nelle applicazioni successive imporremo sempre quest’ultima condizione.
Il termine TSAR
( )
k dentro la parentesi quadra nella (2.2) indica la modulationtransfer function del SAR. E’ importante a tal proposito osservare che le onde lunghe
del mare vengono rese visibili in un’immagine SAR da una variazione locale (reale o apparente) della riflettività della scena. In particolare, TSAR
( )
k descrive i meccanismi secondo cui le variazioni dell’altezza superficiale e le diverse velocità delle varie porzioni di superficie provocano una modulazione dell’intensità dell’immagine SAR risultante. Dal punto di vista analitico, essa può essere rappresentata come la somma coerente di tre termini, corrispondenti ai principali meccanismi che contribuisconoalla formazione dell’immagine SAR e cioè il fenomeno di tilt modulation, quello della hydrodynamic modulation ed infine quello del velocity bunching:
( )
( )
SAR t
T k =T k +T kh
( )
+T kvb( )
(2.3)In particolare, il termine T kt
( )
tiene conto di come la modulazione dell’immagine SAR sia legata alle variazioni dell’angolo di incidenza locale dell’onda elettromagnetica rispetto alla normale alla superficie macroscopica del mare. Il fenomeno dipende sia dalla geometria del sistema SAR, sia dalla polarizzazione dell’onda elettromagnetica incidente. Tenendo conto che il coefficiente dibackscattering risulta variabile con l’angolo di incidenza θ , la funzione di
trasferimento T kt
( )
della tilt modulation può essere espressa come segue:( )
0 0 1 t l T k ikσ
σ
θ
∂ = ∂ (2.4)dove σ0 è il coefficiente di backscattering superficiale ed il sistema di riferimento è scelto in modo tale che k sia concorde con la direzione di volo della piattaforma: di x
conseguenza k , componente radiale del vettore d’onda l k coincide con k o con y − ky
a seconda che il SAR sia left looking o right looking. Considerando per le onde corte
di superficie un andamento spettrale del tipo W k
( )
∝k−4 come suggerito da Phillips,per elevati valori della costante dielettrica (che per l’acqua del mare vale circa 80), questa funzione di trasferimento può essere approssimata tramite l’espressione:
( )
4 2 1 t l cot T k ik sinθ
θ
= + (2.5a)( )
8 2 l t ik T k sinθ
= (2.5b)rispettivamente per il caso di polarizzazione verticale (VV) e di polarizzazione orizzontale (HH).
Il termine T kh
( )
nella (2.3) è associato invece alla modulazione idrodinamica: i rapidi cambiamenti del vento locale provocano una variazione della rugosità del profilo dell’onda lunga ed una distribuzione non uniforme delle onde corte sulla superficie marina. Nell’ipotesi di essere in presenza di mare relativamente calmo, quando le interazioni non lineari che producono la crescita e la rottura delleonde sono trascurabili, e sempre relativamente ad uno spettro del tipo di Phillips per le onde corte, si può assumere [10]:
( )
4 5 2 2 y22 h k i T k . k kω µ ω
ω
µ
− = + (2.6)Nella relazione precedente, k e ω = gk rappresentano rispettivamente la costante di propagazione e la pulsazione dell’onda di gravità; si noti che il rapporto 2 2
y
k k
definisce la quantità sin2φ, in cui φ è l’angolo tra la direzione di volo e la direzione
di propagazione dell’onda lunga e µ è un parametro chiamato costante di relazione temporale, il cui valore tipico, stimato sperimentalmente, è di circa 0.5 sec-1. Nel caso µ = , le onde corte increspano maggiormente la superficie in corrispondenza 0 delle creste delle onde lunghe, mentre per µ ≠ si verifica uno sfasamento tra il 0 massimo dell’energia associata alle onde corte e le creste dell’onda lunga. Questo sfasamento provoca una differente cross-section sui due fianchi dell’onda (up-wave e
down-wave). E’ importante osservare che quelle componenti delle onde corte che si propagano perpendicolarmente all’onda lunga non interagiscono con quest’ultima, non vi è cioè scambio di energia tra queste componenti e l’onda lunga. Conseguentemente, non si ha nessun contributo alla modulazione del coefficiente di
scattering. Ciò giustifica la dipendenza di T kh
( )
da sin2φ. Nel caso µ = , la 0( )
h
T k può essere riscritta in modo più compatto:
( )
4 5 2h y
T k = . k k (2.7)
La determinazione esatta di questa funzione è ancora oggetto di ricerche e l’unica caratteristica per il momento consolidata è la sua dipendenza dalle onde che si propagano nella direzione range.
I due effetti ora descritti sono presenti indipendentemente dal fatto che il sensore attivo sia un radar ad apertura reale o ad apertura sintetica, per questo motivo la loro somma coerente viene spesso associata alla funzione di trasferimento del radar ad apertura reale ed indicata in letteratura con la notazione:
( )
( )
RAR t
T k =T k +T kh
( )
(2.8)Analizziamo ora l’ultimo termine della (2.3), quello cioè dovuto al cosiddetto fenomeno del velocity bunching. Questo meccanismo, tipico dei sistemi SAR e non
riscontrabile in quelli RAR, permette di ottenere immagini di onde che si propagano lungo la direzione azimuthale. Esso viene in genere quantificato nella funzione di trasferimento SAR tramite la seguente espressione [10]:
( )
(
)
i vb x l R T k k cos i sin k k e Vω
θ
θ
∆ = − (2.9)Nella (2.9), R rappresenta la distanza tra l’antenna ed il centro della scena
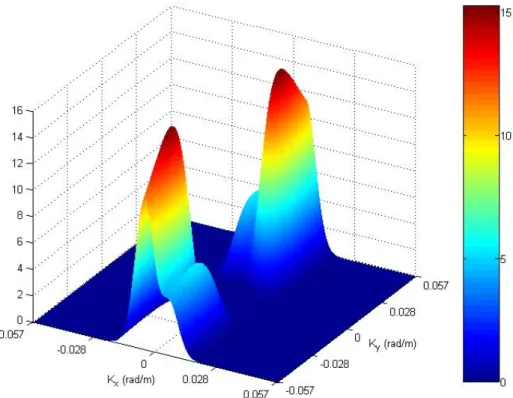
illuminata, V è la velocità della piattaforma: il rapporto tra queste due quantità vale circa 120 sec nel caso del sistema SAR ERS-1. Il parametro ∆ può assumere valore nullo o pari a π , indicando che la modulazione dell’intensità dell’immagine in oggetto può risultare in fase o sfasata di 180° rispetto alla cresta dell’onda lunga, in dipendenza del fatto che la componente azimuthale del vettore di propagazione dell’onda sia orientata nello stesso verso del vettore velocità della piattaforma SAR o nel verso opposto. Si noti che la Tvb
( )
k tende ad annullarsi lungo la direzione 90° misurata rispetto alla direzione di volo k : tale caratteristica trasforma lo spettro xunimodale del mare in uno bimodale della corrispondente immagine SAR. Questo sdoppiamento è tanto più evidente quanto più lo spettro del mare è diretto lungo la
line of sight del SAR. Per piccoli angoli di incidenza (θ < °30 ), viene assunta un’espressione semplificata rispetto alla (2.9):
( )
i vb x R T k k cos e Vω
θ
∆ = (2.10)E’ importante osservare che la (2.3) suggerisce di sommare coerentemente i tre contributi dovuti ai meccanismi ora descritti. Questo implica che, poiché sia la tilt modulation che la hydrodynamic modulation sono dipendenti dalle onde che si
propagano nella direzione range, i due meccanismi possono interagire anche fortemente tra di loro. In particolare, essi possono interferire in modo costruttivo o distruttivo a seconda che le onde si muovano verso il radar o che si allontanino da esso. Inoltre, poiché l’effetto di tilting aumenta per angoli di incidenza piccoli, si
potrebbe, in sede di progetto di un sistema SAR per osservazioni oceaniche, prevedere di scegliere angoli di nadir della piattaforma piccoli per massimizzare questo effetto e minimizzare al contempo l’effetto idrodinamico, ad oggi più difficilmente interpretabile.
In Fig. 2.1 e Fig. 2.2 sono rappresentate le MTF associate alla componente RAR e al meccanismo del velocity bunching: la prima risulta esattamente simmetrica
rispetto alla componente k , mentre lo è solo approssimativamente rispetto a x k ; la y
seconda è simmetrica sia rispetto ad un cambiamento di segno di k che di x k . y
Fig. 2.1 - Contributo RAR alla MTF del SAR
2.3 - Approssimazione quasi-lineare
L’approssimazione lineare (2.2) è considerata valida solamente per componenti azimuthali del vettore d’onda k molto piccole, quando lo shift in
azimuth causato dalla velocità orbitale è molto piccolo rispetto alla lunghezza d’onda dell’onda marina considerata. Un’approssimazione valida per valori più grandi della componente azimuthale è quella cosiddetta quasi-lineare, nella quale vengono inclusi gli effetti dell’azimuthal smearing; in formule:
( )
( )
2( )
2 2 2 x i SAR w k S k T k S k exp kσ = − (2.11)Il termine esponenziale nella (2.11) rappresenta l’attenuazione nella risposta in azimuth introdotta dal movimento della superficie del mare e viene definito in letteratura come funzione di trasferimento dinamica. In termini quantitativi, l’effetto di smearing può essere introdotto come segue: uno scatteratore elementare sulla
superficie, che possiede una componente di velocità radiale v rispetto alla rad
direzione di osservazione del SAR, viene rappresentato nella corrispondente immagine SAR con uno spostamento in azimuth pari alla quantità ξ =Rvrad V, con
R e V definiti in precedenza. Poiché i vari elementi della superficie possiedono velocità in parte casuali e quindi distruttive per il processo di formazione dell’immagine, si produce una degradazione dell’immagine in azimuth. Supponendo che la parte casuale della variazione della velocità radiale sia descritta con una densità di probabilità (d.d.p.) di tipo gaussiano con deviazione standard vσ , gli spostamenti in azimuth risulteranno distribuiti secondo una densità di probabilità gaussiana con deviazione standard ξ =Rv Vσ . Le deviazioni ξ ξ− degli spostamenti dei singoli elementi di superficie all’interno della generica cella di risoluzione producono la suddetta degradazione. Nella rappresentazione in termini di funzione di trasferimento adottata, questo implica un’attenuazione della risposta in corrispondenza di valori elevati della componente azimuthale del vettore d’onda k .
In termini spettrali si può tenere conto di ciò mediante la funzione di trasferimento dinamica, la cui intensità è regolata dal termine kσ, che assume valore [8]:
2 V k R v σ σ = (2.12)
La grandezza kx = 2kσ assume il significato di numero d’onda di cut-off
azimuthale. L’effettivo valore di kσ non è stato comunque ancora definito univocamente in letteratura; rimangono infatti aperte delle questioni riguardanti quali onde contribuiscono con le loro velocità al fenomeno in esame. In particolare in [11] si suggerisce di considerare solo le velocità superficiali dovute alle onde con lunghezza d’onda minore di due volte il limite di risoluzione del SAR. Di conseguenza, se si assume che la superficie del mare sia descritta dallo spettro di Pierson, si ottiene per kσ un valore pari a:
2 s V k R h σ
π
= (2.13)dove h è l’altezza significativa della superficie oceanica. Nel caso in cui si ipotizzi s
che le velocità che contribuiscono allo smearing siano dovute a tutte le onde che
esistono su tutte le scale spaziali si ottiene invece:
4 s
V k
R h
σ = (2.14)
In letteratura, è stato molto dibattuto il problema dei limiti di validità dell’approssimazione quasi-lineare. Alpers [12] ha proposto allo scopo il seguente parametro che caratterizza il grado di non linearità del processo di formazione dell’immagine SAR della superficie del mare:
(
)
1 2 3 2 1 4 s p p p R c g h G , cos k Vθ φ
φ
= (2.15) dove(
)
(
2 2 2)
1 2 p pG θ φ, = sin θ sin φ +cos θ , mentre kp e
φ
p indicano il numero d’onda e la direzione del picco spettrale. Per valori di c minori di 0.3 si può utilizzare l’approssimazione quasi-lineare.La (2.11) può essere riscritta in modo da mettere in evidenza il legame lineare tra lo spettro del mare e quello della corrispondente immagine SAR. Trascurando il termine riguardante la risposta stazionaria, si ottiene:
( )
( ) ( )
i SAR w
dove
( )
( )
2 2 2 2 x SAR SAR k W k T k exp kσ = − .Discutiamo quindi la funzione di trasferimento totale nell’approssimazione quasi-lineare WSAR
( )
k . I parametri fondamentali che la caratterizzano sono:1. Il rapporto R V tra la distanza dell’antenna dal bersaglio e la velocità della piattaforme;
2. L’angolo di incidenza θ rispetto alla verticale;
3. Il tipo di polarizzazione dell’onda elettromagnetica incidente; 4. L’altezza significativa h dell’onda marina. s
Per quanto riguarda la dipendenza da h , per tutti i sistemi si nota che all’aumentare s
di h la frequenza di cut-off azimuthale diminuisce. Conseguentemente, la funzione s
di trasferimento totale presenta andamenti diversi a seconda del sistema di onde sotto osservazione. Si noti altresì come l’unico parametro del radar che condiziona l’andamento della funzione di trasferimento dinamica sia il rapporto R V della piattaforma SAR. Questo implica che cambiando la frequenza radar o il tempo di integrazione non si ottiene nessun cambiamento della funzione di risposta dinamica; la degradazione della risoluzione in azimuth può essere diminuita solamente riducendo il rapporto R V . D’altra parte, la funzione di trasferimento totale non subisce apprezzabili variazioni al variare dell’angolo di incidenza, che nei sistemi SAR reali assume valori tipici compresi tra 20° e 30°. E’ importante, invece, il tipo di polarizzazione dell’onda elettromagnetica incidente impiegato.
In Fig. 2.3 (a) e 2.3 (b) è rappresentata la funzione di trasferimento WSAR
( )
kper il caso del satellite SAR ERS-1 quando la superficie marina osservata assume due valori diversi dell’altezza significativa. Si noti come la WSAR
( )
k risulti approssimativamente simmetrica rispetto a k , ma sia caratterizzata da un spiccata yFig. 2.3 (a) - Modulation Transfer Function SAR ERS-1 (Hs = 1 m)
2.4 - Trasformazione non lineare
Come detto in precedenza, il legame tra lo spettro del mare e lo spettro dell’immagine SAR è in generale fortemente non lineare. Il modello sviluppato in [6] consente di operare una stima dello spettro dell’immagine SAR a partire da quello del mare in situazioni più generali di quelle per le quali è valida l’approssimazione quasi-lineare. Il punto cruciale dell’algoritmo è proprio la definizione della relazione non lineare che viene poi utilizzata nello schema iterativo. Riassumiamo i passaggi che ci portano alla determinazione della relazione non lineare partendo dalla seguente considerazione: dei tre meccanismi riconosciuti fondamentali per la formazione di un’immagine SAR, la tilt modulation e la hydrodynamic modulation sono presenti indipendentemente dal fatto che il sensore attivo a microonde sia un radar ad apertura reale o un radar ad apertura sintetica, mentre il fenomeno del
velocity bunching è tipico dei sistemi SAR. Consideriamo quindi un sistema RAR
che illumina una superficie marina; l’immagine radar che si otterrà sarà quella formata grazie al meccanismi della tilt modulation e della hydrodynamic modulation.
Per passare alla corrispondente immagine SAR è sufficiente mappare ogni singola porzione elementare della superficie, situata nella posizione r ' , nella posizione
corrispondente r = +r ' ξ
( )
r ' , dove ξ rappresenta lo spostamento azimuthale introdotto precedentemente. Questa operazione di mapping, tradotta in terminispettrali, dà origine alla più generale relazione non lineare in questione, che è stata espressa in letteratura mediante la seguente relazione [6]:
( )
22 2( )
1 2 2 2 m n SAR x i x n,m n m n k R S k exp k S k kσ V ∞ = = − = − ∑ ∑
(2.17)Si noti che l’indice n nella (2.17) indica l’ordine di non linearità rispetto allo spettro del mare, considerato come ingresso del sistema, mentre l’indice m rappresenta l’ordine di non linearità rispetto al parametro R V , caratteristico del fenomeno del
velocity bunching.
I vari termini delle sommatorie si ricavano dalle relazioni che coinvolgono l’autocorrelazione spaziale delle velocità superficiali, l’autocorrelazione spaziale delle variazioni del coefficiente di scattering ed infine la cross correlazioni tra queste
due grandezze. In particolare, se indichiamo con F ⋅
{}
l’operatore di trasformazione di Fourier si ha:( )
( )
2 n v SAR n, n f r S k n! = F (2.18a)( )
( )
(
( )
)
( )
1 2 1 1 n Rv Rv v SAR n, n i f r f r f r S k n ! − − − − = − F (2.18b)( )
(
)
( ) ( )
(
)
( )
( )
( )
( )
( )
}
1 2 2 2 1 1 0 1 2 0 n SAR R v Rv Rv n, n n Rv Rv v S k f r f r f r f n ! n ! f r f f r − − − = + − − − ⋅ − − F (2.18c)dove si assume che 0!=1 e
( )
−1! −1= . Le funzioni che figurano nelle (2.18) 0 definiscono rispettivamente le seguenti grandezze: l’autocorrelazione della velocitàorbitale v
( )
(
) ( )
F-1{
( ) ( )
2}
w v
f r = v x r v x+ = S k T k , l’autocorrelazione del coefficiente di scattering normalizzato (pari all’intensità dell’immagine vista da un
radar ad apertura reale) R
( )
(
) ( )
F-1{
( ) ( )
2}
w v
f r = σ x r+ σ x = S k T k ed infine la loro cross correlazione fRv
( )
r = σ(
x r v x+) ( )
. In termini spettrali, le quantità oraintrodotte sono legate allo spettro del mare attraverso le funzioni di trasferimento definite in precedenza: la velocità orbitale attraverso la T kv
( )
, legata a sua volta alla( )
vb
T k tramite la relazione Tvb
( )
k = −ik T kx v( )
ed il coefficiente di scattering tramite la TRAR( )
k .Se fissiamo l’indice n, si può ottenere l’espansione (2.17) in termini dell’ordine di non linearità m:
( )
2 22 1( )
2( )
( )
SAR SAR SAR
x i n k S k exp S k S k ... S k ... kσ = − + + + + (2.19)
Si noti che i termini SAR
( )
nS k in parentesi non rappresentano i termini di una espansione dello spettro di partenza S ki
( )
in senso classico; ciò è conseguenza dell’aver messo in evidenza il termine di cut-off azimuthale. Si noti inoltre che ilprimo termine della sommatoria in (2.19) rappresenta il termine già ricavato nell’approssimazione quasi-lineare: questa proprietà, mostrata nelle figure successive, sarà usata nel paragrafo successivo per sviluppare uno schema iterativo che consenta l’inversione della trasformazione completamente non lineare. In particolare si fa riferimento al caso di mare completamente sviluppato caratterizzato da una lunghezza d’onda del picco di circa 240 m, che si propaga nella direzione 65° rispetto alla direzione di volo della piattaforma satellitare.
Fig. 2.5 - Spettro SAR: Approssimazione quasi-lineare
2.5 - Algoritmi di inversione spettrale
Le relazioni precedentemente ricavate tra lo spettro del mare e lo spettro dell’immagine SAR consentono di operare, tramite opportuni algoritmi di inversione, una stima dello spettro del mare. Nel caso più semplice in cui sia possibile utilizzare l’approssimazione quasi-lineare, l’inversione si realizza tramite una semplice divisione dello spettro dell’immagine SAR per la funzione di trasferimento globale
( )
SAR
W k . Le difficoltà legate a questa procedura consistono nel fatto che tale funzione di trasferimento non è univocamente determinata dai parametri geometrici e operativi del sistema, ma dipende anche dallo stato del mare osservato, tramite l’altezza significativa hs. Questa difficoltà può essere superata realizzando un algoritmo di inversione di tipo iterativo. A partire da una stima iniziale dell’altezza significativa, si opera l’inversione utilizzando la funzione WSAR
( )
k che corrisponde al particolare valore di hs scelto. Si effettua quindi un controllo sull’altezza significativa associata allo spettro ricavato mediante l’inversione; a tale scopo viene utilizzata la relazione:(
)
1 2 1 4 2 x y s w x y x y k k h S k , k dk dkπ
= ∫ ∫
(2.20) Se il valore ottenuto è lontano da quello ipotizzato inizialmente, viene aggiornata lafunzione WSAR
( )
k utilizzando il nuovo valore di hs. Si procede poi su questa strada fino a quando il valore dell’altezza significativa stimato inizialmente ad un certo passo, coincide con quello calcolato dallo spettro del mare risultante dall’inversione.E’ importante però osservare che in generale, il legame tra lo spettro del mare e lo spettro dell’immagine SAR corrispondente è fortemente non lineare. Di conseguenza, l’approssimazione quasi-lineare non fornisce risultati accurati. Nei casi più generali è necessario ricorrere ad un modello più complesso, che prevede una relazione non lineare tra spettro del mare e spettro dell’immagine SAR. Una procedura di inversione che fornisce buoni risultati è quella proposta da Hasselmann in [6]. E’ opportuno premettere che, formalmente, non esiste una relazione univoca che lega i due spettri, basti pensare all’implicita ambiguità di fase (pari a 180°),
derivante dal fatto che la superficie marina possiede un movimento che nell’immagine SAR non è risolvibile (a meno di non usare delle tecniche proposte recentemente che utilizzano dei sistemi a doppia antenna o che elaborano opportunamente successive osservazioni della scena [13]).
Come proposto in [6], la stima ottimale dello spettro del mare S kw
( )
è quella che minimizza un’opportuna funzione costo:( )
( )
( )
( )
( )
2 2 w w i i w ˆ S k S k ˆ J S k S k dk ˆ dk B S kµ
− = − + + ∫
∫
(2.21)La minimizzazione può essere ottenuta ancora con un metodo iterativo. In particolare, nella (2.21) ˆS k rappresenta una stima iniziale dello spettro del mare, w
( )
in genere abbastanza realistica dato che ottenuta mediante misure di verità in situ eseguite tramite opportuni sistemi di boe. Essa viene utilizzata per impostare il primo passo della procedura iterativa e la convergenza della procedura stessa dipende in buona misura dalla bontà di questa prima stima dello spettro. Inoltre, ˆS k è lo i( )
spettro dell’immagine SAR ottenuta direttamente dai dati rilevati dai sensori, mentre( )
i
S k rappresenta lo spettro dell’immagine SAR stimato al termine della generica iterazione. Sempre nella (2.21), µ è un coefficiente che tiene conto del grado di somiglianza tra lo spettro del mare ricostruito dall’immagine SAR di partenza e la stima iniziale ˆS k ; B è una costante reale positiva piccola, introdotta per evitare w
( )
divisioni per zero nei punti del piano k in cui risulta ˆS k = . Alternativamente, si w( )
0 può usare una funzione costo diversa:( )
( )
( )
( )
( )
( )
2 2 w w i i i w ˆ S k S k ˆ ˆ J ' S k S k S k dk ˆ dk B S kµ
− = − + + ∫
∫
(2.22)che permette di massimizzare l’accordo tra lo spettro dell’immagine SAR prodotta dal sensore e lo spettro dell’immagine SAR ricostruita dall’algoritmo iterativo, in prossimità dei picchi d’intensità degli spettri. La minimizzazione di uno dei due funzionali sopra definiti, cioè la verifica della condizione ∂ ∂J Sw = , può essere 0 raggiunta in maniera efficiente con uno schema che utilizza la relazione quasi-lineare tra lo spettro del mare e lo spettro dell’immagine SAR. La procedura iterativa viene
inizializzata assumendo come prima stima dello spettro del mare quello misurato mediante il sistema di boe: 1
( )
( )
w ˆw
S k =S k . In particolare, noto lo spettro del mare calcolato alla n-sima iterazione n
( )
w
S k , si valuta lo spettro dell’immagine SAR corrispondente n
( )
i
S k applicando la (2.19). La soluzione al passo n+1 viene ricavata da quella al passo n-simo mediante le seguenti relazioni:
( )
( )
( )
1 n n n w w w S + k =S k + ∆S k (2.23a)( )
( )
( )
1 n n n i i i S + k =S k + ∆S k (2.23b) La variazione n( )
i S k∆ da apportare allo spettro dell’immagine SAR viene calcolata a partire da quella n
( )
w
S k
∆ dello spettro del mare tramite la trasformazione quasi-lineare:
( )
( )
( )
n n i SAR w S k W k S k ∆ = ∆ (2.24)Rimane a questo punto da definire la procedura che consente la valutazione del termine n
( )
w
S k
∆ , correzione apportata allo spettro del mare al passo n-simo. Il valore cercato si ottiene inserendo nell’espressione del funzionale le espressioni di n
( )
w
S k e
( )
n i
S k ora ottenute, ovvero:
( )
( ) ( ) ( )
( ) ( )
( )
( )
( ) ( ) ( )
( )
( ) ( )
( )
2 2 i w n w i w A k F k S k S k S k A k A k B k B k F k S k S k A k A k B kδ
µδ
δ
µδ
− + ∆ = − − − − + − − − (2.25) dove( )
( )
n( )
i ˆi i S k S k S kδ
= − (2.26)( )
( )
n( )
w ˆw w S k S k S kδ
= − (2.27)( )
2( )
2 SAR A k =W k +µ
(2.28)( )
SAR( )
SAR( )
B k =W k W −k (2.29)Riassumiamo i passi principali dell’algoritmo: dalla stima iniziale dello spettro del mare si ricava lo spettro dell’immagine SAR tramite la (2.19). Successivamente si valuta, mediante la (2.25) la variazione da apportare allo spettro del mare e, tramite
la (2.26), la variazione dello spettro dell’immagine SAR. Ottenuti quindi gli spettri al passo successivo mediante le (2.23), si procede ad una ulteriore iterazione. L’algoritmo ora descritto converge anche in casi fortemente non lineari, purché si preveda di scegliere un valore di µ non troppo piccolo. Una scelta ottimale,
suggerita in [6], è 0 1
(
2( )
)
i
ˆ . max S k
µ ≥ , mentre per B conviene usare
( )
(
)
0 01 ˆw