41
Cap. 5 Sperimentazione
Il lavoro di sperimentazione descritto in questo capitolo è stato caratterizzato da una lunga serie di esperimenti su configurazioni diverse di attuatore, che miravano al raggiungimento di un dispositivo adatto per la modulazione di forma, essenzialmente in grado di fornire una buona deformazione in risposta al campo elettrico applicato. Si vedranno in dettaglio le caratteristiche tecniche del dispositivo ad emisfere non conduttrici utilizzato e le fasi di selezione del materiale e delle configurazioni che hanno portato ai migliori risultati.
Negli ultimi paragrafi verrà analizzato un caso di estroflessione straordinaria che ha ispirato nuove sperimentazioni per riprodurla in modo controllato.
5.1 Selezione del materiale con caratteristiche attuative
migliori
Il lavoro di sviluppo dell’attuatore ad estroflessione ha comportato una prima fase di selezione del materiale al fine di ottenere e riprodurre un attuatore con le migliori qualità.
Queste prove sono state eseguite sul dispositivo ad emisfere conduttrici descritto nel paragrafo 4.2. Abbiamo selezionato il materiale ottimale utilizzando film che differivano per la quantità di plastificante presente nella composizione del silicone, mentre rimanevano costanti le dimensioni del vincolo, degli elettrodi, dell’altezza della sfera e del diametro. Per ogni tipo di silicone si sono applicate tensioni a partire da 4-5KV sino ad arrivare alla rottura del film ossia alla condizione per cui si raggiunge il voltaggio massimo che il dielettrico può supportare in corrispondenza del quale, fra gli elettrodi, si crea una scarica che danneggia il polimero ed elimina l’isolamento. Il minimo campo elettrico che si può applicare fra due punti di un dielettrico omogeneo in corrispondenza del quale si produce una scarica elettrica prende il nome di rigidità dielettrica e questa rappresenta una proprietà caratteristica di ogni dielettrico. Le differenze fra le deformazioni dei vari film sono state apprezzate qualitativamente con l’ausilio di una videocamera.
42
In figura sono rappresentati due fotogrammi estratti da un filmato realizzato con una membrana contenente il 40% di plastificante, in risposta ad un campo elettrico applicato di 13V/ m. Tale deformazione, nella condizione con emisfera conduttrice, è sufficientemente apprezzabile, nonostante sia disomogenea. Si può notare, infatti, come detto precedentemente, che il sollevamento della parte centrale dell’attuatore è accompagnato da un avvicinamento all’emisfera dei bordi dell’elettrodo per mantenere il contatto elettrico. Ulteriori deformazioni in altezza non sono perciò possibili in questa configurazione in quanto si interromperebbe il contatto tra la membrana e l’emisfera conduttrice; l’attuatore raggiunge, in questo caso, una condizione di equilibrio alla massima altezza.
I risultati che hanno portato alla selezione del materiale migliore sono derivati da una serie di prove su provini con il 10%, 20%, 30%, 40% di plastificante, e in seguito con quantità del 35% e del 45%. Sono state scartati, dopo alcuni esperimenti, i provini con quantità di plastificante minore del 10% perché risultavano troppo rigidi e si opponevano eccessivamente all’attuazione; i provini con il 45% di plastificante sono risultati buoni dal punto di vista del comportamento elastico ma giungevano spesso a rottura a potenziali bassi, ed erano quindi inaffidabili da questo punto di vista. I migliori risultati sono stati ottenuti per provini con il 40% di plastificante, i quali hanno dimostrato di possedere un buon compromesso fra buona resistenza meccanica e deformazione quando sottoposti a potenziali fino a 16-18kV. Per provini con il 10% di plastificante i risultati erano accettabili per quanto riguarda le deformazioni ma, essendo più rigidi meccanicamente, queste possono essere ottenute con potenziali applicati più alti oppure con film di spessore minore. Gli spessori utilizzati sono stati di 0,5mm e 1mm; ci siamo concentrati su provini di 1mm di spessore per quantità di Fig. 5.1: Attuazione della membrana elastomerica utilizzando la base con emisfere conduttrici a riposo (a sinistra) e in fase attiva (a destra)
43
plastificante del 40%, mentre su spessori di 0,5mm per i provini più rigidi, con quantità di plastificante del 10%. Abbiamo scartato film con caratteristiche intermedie perché per essi l’attuazione era ridotta rispetto ai precedenti.
La scelta che ha caratterizzato gli esperimenti successivi è stata quella di provini al 40% di spessore 1mm, in quanto, essendo sufficientemente elastici, forniscono una buona attuazione, i rischi di penetrazione dell’elettrodo durante la stesura sono ridotti e le rotture avvengono a potenziali più alti, con la possibilità di sfruttare la deformazione a partire da bassi campi, al contrario delle membrane più rigide. Tali film sono stati utilizzati successivamente per effettuare prove sul dispositivo ad emisfere non conduttrici, che permette una migliore attuazione in estroflessione.
5.2 Pianificazione degli esperimenti sul dispositivo ad
emisfere non conduttrici
Il materiale utilizzato non è l’unica variabile di un attuatore ad estroflessione. Come è intuibile analizzando i risulati ottenuti, ci sono alcuni parametri che influenzano le caratteristiche di un attuatore, in particolare questi sono:
• Diametro dell’elettrodo, • Diametro del vincolo, • Diametro dell’emisfera, • Altezza dell’emisfera.
Abbiamo perciò dovuto considerare tutte le diverse configurazioni al variare delle dimensioni degli elettrodi e dei vincoli, del diametro delle sfere e dell’altezza con cui fuoriuscivano dal piano. Il dispositivo utilizzato è stato quello ad emisfere non conduttrici in quanto, come avevamo previsto, ha portato a risultati di gran lunga migliori. Un esempio di attuazione su un dispositivo con emisfera non conduttrice, di dimensioni simili a quella conduttrice visibile in figura 5.1, può essere apprezzato nella figura seguente, in corrispondenza dello stesso campo elettrico (13V/ m).
Fig. 5.2: Attuazione della membrana elastomerica utilizzando la base con emisfere non conduttrici a riposo (a sinistra) e in fase attiva (a destra)
44
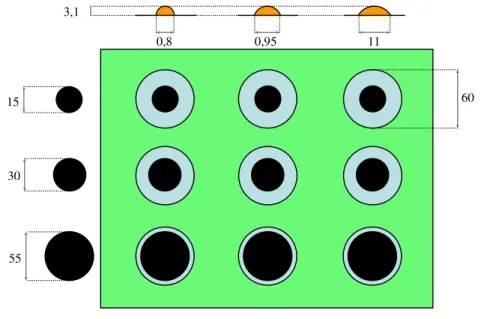
Si può notare come l’attuazione in questo secondo caso sia omogenea perché anche l’elettrodo inferiore possiede un contatto dedicato, e pronunciata perché le dimensioni dell’elettrodo sono uguali a quelle del vincolo per i motivi che saranno descritti. Per ridurre il numero eccessivo di configurazioni da analizzare e per semplificare il processo, la sperimentazione è avanzata lungo due strade parallele importanti. Nel primo caso si analizzava l’attuazione al variare dell’altezza con la quale l’emisfera fuoriusciva dal piano, nell’altro al variare del diametro dell’emisfera stessa. In entrambi i casi l’altra variabile era il diametro dell’elettrodo, mentre il diametro dei vincoli è stato preso costante. Sono stati messi a punto due diversi DoE che schematizzavano l’esperimento al variare dei diversi parametri.
30 15 55 60 3,1 11 0,95 0,8
Fig. 5.3: DoE delle configurazioni possibili mantenendo costante il vincolo e l’altezza delle emisfere, al variare delle dimensioni degli elettrodi e dell’altezza del diametro delle emisfere
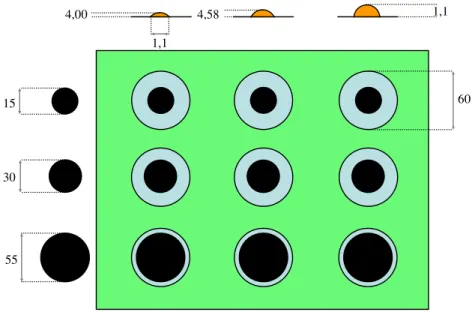
45 55 30 15 1,1 60 4,00 4,58 1,1
A partire da questi DoE sono state realizzate numerose prove di carattere qualitativo per stabilire quale dovesse essere la configurazione ottimale. E’ stato possibile notare, attraverso l’uso di strumenti hardware di ripresa e software che gestiscono filmati video, che le configurazioni per le quali la dimensione dell’elettrodo tendeva a coincidere con quella del vincolo presentavano un’attuazione migliore. Abbiamo potuto ricavare, quindi, un risultato estremamente importante ai fini della sperimentazione successiva, cioè che le configurazioni dotate di elettrodi e vincoli di uguale dimensione erano le più soddisfacenti dal punto di vista attuativo.
Per le analisi successive la dimensione degli elettrodi e del vincolo è stata fissata a 30mm, 40mm e 55mm, per stabilire quale fosse l’effetto dovuto alle dimensioni della membrana rispetto alle dimensioni delle emisfere. E’ stata quindi messa a punto una base di materiale rigido sulla quale sono state incollate 6 sfere differenti, di altezza e diametro noti, in modo da realizzare gli esperimenti successivi su queste configurazioni, sfruttando i risultati finora ottenuti.
Fig. 5.4: DoE delle configurazioni possibili mantenendo costante il vincolo e il diametro delle sfere, affondandole nel piano ad altezze differenti, al variare delle dimensioni degli elettrodi
Fig. 5.5: Dispositivo con 6 emisfere non conduttrici
46
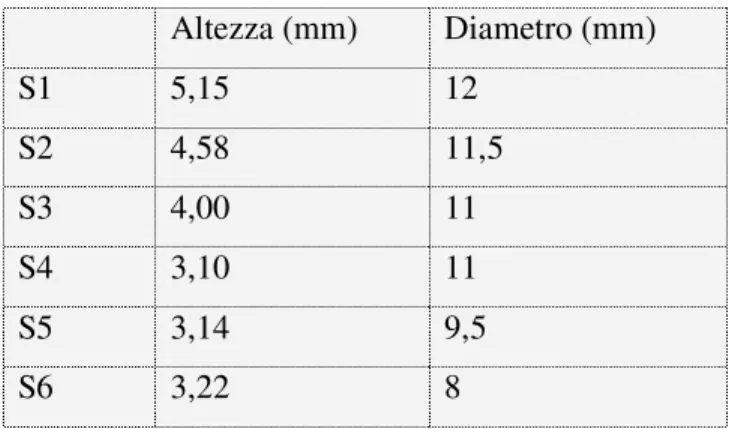
Tabella 5.1: Dimensioni delle 6 emisfere non conduttrici che caratterizzano il dispositivo di sostegno
Nella figura 5.5 della pagina precedente si può osservare il dispositivo realizzato; sono visibili, oltre alle sfere di resina, i nastri conduttivi per portare il collegamento all’esterno. Altezza (mm) Diametro (mm) S1 5,15 12 S2 4,58 11,5 S3 4,00 11 S4 3,10 11 S5 3,14 9,5 S6 3,22 8
Dopo aver messo a punto il dispositivo adatto sono stati effettuati dei nuovi esperimenti per quantificare in modo preciso le deformazioni raggiunte. Per fare ciò si è reso necessario utilizzare strumenti di acquisizione di più alto livello per caratterizzare l’attuazione quantitativamente e ricorrere ad un metodo di misura in grado di fornire dei dati molto dettagliati. Tale metodo è descritto nel prossimo paragrafo. Per queste prove abbiamo scelto delle membrane preparate precedentemente con il 40% di plastificante, sulle quali sono stati applicati elettrodi di dimensione 30mm, 40mm e 55mm, come già anticipato. Gli attuatori sono stati quindi considerati al variare del diametro e dell’altezza dell’emisfera, in accordo con quanto previsto nei precedenti DoE, sul nuovo dispositivo. Abbiamo assunto il diametro del vincolo pari a quello degli elettrodi, per ciascuna serie di provini, in accordo con i risultati ottenuti precedentemente. Le prove sono state eseguite in due sessioni. Nella prima, ciascuna serie di attuatori è stata sollecitata al di sotto del voltaggio di rottura dielettrica per ottenere dei dati generali. Nella seconda, i dati ottenuti, riportati nel capitolo 7, sono stati ampliati e incrementati per voltaggi intermedi, ottenendo curve sperimentali campo elettrico-deformazione che ricalcano molto bene le curve teoriche.
I risultati ottenuti da queste prove ci hanno permesso di fare considerazioni sperimentali sul rapporto ottimale tra il diametro dell’elettrodo e le dimensioni dell’emisfera.
47
5.3 Tecnica di misura dell’estroflessione
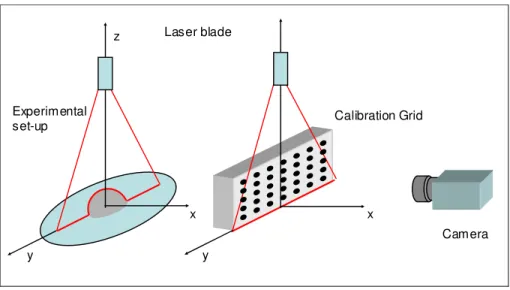
Il meccanismo di misura per mezzo del quale sono stati ricavati i valori di deformazione in seguito all’attivazione dell’attuatore consiste in un emettitore laser montato al di sopra del dispositivo, fissato ad un cavalletto, e in un apparato di acquisizione fisso, costituito da una videocamera ad alta definizione collegata ad un pc.
Il laser emette un segmento luminoso, di colore rosso, che si proietta sulla superficie di appoggio sottostante, nella zona inquadrata dalla videocamera, posizionata con un certo angolo di inclinazione rispetto al piano, in modo da ottenere una visione chiara.
Camera Calibration Grid Laser blade Experimental set-up z x x y y
Il principio di funzionamento del meccanismo di misura è caratterizzato dall’utilizzo di un particolare algoritmo che si basa sulle variazioni relative al segmento luminoso emesso dal laser in un filmato digitale acquisito con la videocamera, isolato dallo sfondo per mezzo di software specifici per la videoelaborazione, come sarà descritto in seguito. I calcoli non dipendono dalla posizione della videocamera, dal momento che vengono considerati gli errori di aberrazione dovuti al fatto che la videocamera non si trova in posizione parallela al piano dove è posizionato l’attuatore, bensì è
Fig. 5.6: Meccanismo di misura. E’ visibile il segmento rosso del laser che segue la curvatura dell’attuatore (a sinistra), la griglia di calibrazione (al centro) e la videocamera per
48
inclinata per favorire un corretta visione del fenomeno e del segnale luminoso emesso dal laser che si proietta sulla superficie dell’elettrodo superiore del provino.
Per quantificare l’errore introdotto dall’angolo di inclinazione della videocamera, mantenendo fisse tutte le parti del meccanismo, si acquisisce un’immagine di una griglia prestampata, costituita da una matrice di punti di diametro noto equispaziati di una distanza anch’essa nota. Una griglia di calibrazione tipica è composta da punti di raggio di 2mm distanziati l’un l’altro di 8mm posizionati in una matrice di 8x10 punti. L’algoritmo di ricostruzione dell’immagine, a partire dal video digitale, calcola l’errore introdotto nell’acquisizione di questa matrice di punti, posizionata nel punto in cui sarà localizzato l’attuatore, al di sotto della lama laser, rispetto ai valori di partenza, ottenendo dei coefficienti di correzione. Gli stessi coefficienti sono applicati ai video digitali registrati durante l’attuazione, che diventano quindi indipendenti dai fattori ottici del sistema. E’ essenziale, per questo motivo, che le varie parti del sistema di misura rimangano in posizione fissa durante tutta la durata delle rilevazioni.
La prima fase del processo di misura riguardava, quindi, l’acquisizione dei filmati digitali da processare. Le acquisizioni sono state effettuate posizionando l’attuatore al di sotto del segmento luminoso emesso dal laser, in modo che esso coincidesse con il diametro dell’attuatore, uniformando gli esperimenti.
I video digitali acquisiti sono stati successivamente analizzati con software specifici di videoelaborazione per ottenere i dati relativi alle deformazioni dell’attuatore ad estroflessione.
Allo scopo sono stati utilizzati due software commerciali: Animation Shop, per estrarre i fotogrammi significativi da ciascun filmato; Matrox Inspector for Microsoft Windows, per calcolare in modo quantitativo l’ampiezza della deformazione. Ciascun filmato acquisito è stato importato nel software Animation Shop, con il quale si estraevano i fotogrammi che costituivano il video. Fra i fotogrammi ne sono stati scelti due significativi: uno che rappresentava l’attuatore in fase inattiva, e l’altro che mostrava la massima estroflessione dell’attuatore in fase attiva. Le immagini relative ai fotogrammi sono state quindi importate nel software Matrox Inspector for Microsoft Windows. Le due immagini sono state calibrate per mezzo dei coefficienti di correzione ricavati precedentemente, contenuti in un file specifico utilizzabile dal programma. La calibrazione ha consentito di ottenere un sistema di misura tarato in millimetri, necessario per quantificare la deformazione. Non è stato possibile
49
utilizzare il metodo di misura automatico previsto, che avrebbe dovuto estrarre digitalmente il segmento luminoso del laser dal resto dell’immagine, per poi calcolare in modo preciso la deformazione. Il problema era relativo all’acquisizione, effettuata in ambiente eccessivamente luminoso. Il software, per questo motivo, non riusciva a discriminare in modo corretto le lunghezze d’onda relative alla luce del laser e quelle vicine dovute alla luminosità dell’ambiente. Siamo andati avanti, quindi, in altra maniera, interpretando in modo diretto attraverso l’uso della barre di misura del software stesso, direttamente collegate alla posizione del mouse sullo schermo. In questo modo abbiamo ottenuto dei dati relativi alla posizione iniziale dell’attuatore inattivo, e alla posizione finale raggiunta all’apice del processo attivo. La differenza fra le due misure consentiva di conoscere l’esatto valore di deformazione ottenuto. I dati sono stati ricavati dalla deformazione della parte centrale dell’attuatore e riportati in modo riassuntivo in un foglio Excel, dal quale si sono ricavati i grafici rappresentati nel prossimo capitolo.
5.4 Over buckling: una conferma delle capacità dei
polimeri elettroattivi
Durante il periodo iniziale di sperimentazione si è verificato casualmente un fenomeno molto particolare su una membrana al 20% di plastificante, di spessore 1mm, elettrodi di 13mm, attivata a 13,5kV sul dispositivo a sfere conduttrici. Dopo alcuni secondi di normale estroflessione, una parte della membrana ha manifestato un effetto di estroflessione straordinaria, che si è rapidamente trasferita al resto dell’attuatore. Tale effetto, definito col termine inglese di over buckling, ha determinato nell’attuatore una estroflessione molto pronunciata la quale, se fosse raggiungibile in modo controllato, potrebbe risolvere i requisiti di grande deformazione richiesti per la modulazione di forma di superfici e per altre importanti applicazioni.
Si pensa che l’effetto di over buckling si sia verificato per alcune cause concomitanti. A livello macroscopico il film utilizzato non presentava particolarità apprezzabili, come ad esempio riduzioni locali di spessore della membrana o degli elettrodi, certamente presenti a livello microscopico. L’effetto raggiunto è derivato, con ogni probabilità, da asimmetrie nella struttura dell’attuatore, che hanno portato ad un assottigliamento locale dando inizio all’over buckling. Il punto di inizio della
50
particolare estroflessione è il punto critico da ricercare, in quanto si devono manifestare le condizioni per cui nel polimero si crei una asimmetria che produca una estroflessione straordinaria locale, come se il punto raggiunto nell’istante precedente ad essa costituisse un stato di riposo per il resto dell’attuatore. Semplicemente, l’altezza raggiunta nel primo stadio dell’estroflessione dovrebbe fungere da base per il secondo stadio, quello di over buckling. L’estroflessione, esclusivamente per effetto delle proprietà elastiche della membrana polimerica, si è poi trasferita al resto del materiale rendendola più omogenea. In figura sono visibili i fotogrammi essenziali che rappresentano le diverse fasi dell’attuazione.
Il comportamento particolare di questa membrana ha messo in mostra gli obiettivi verso i quali i polimeri elettroattivi, in questa configurazione, possono aspirare. Tali deformazioni, raggiunte in modo elastico, e quindi riottenibili dallo stesso attuatore, si possono realizzare attraverso membrane fabbricate appositamente, per riprodurre un effetto di grandissima deformazione, come quello dimostrato in questo esperimento. Lungo questa via si è mobilitata parte della sperimentazione, che ha cercato di riprodurre in modo controllato il fenomeno di over buckling ottenuto. I metodi di fabbricazione e le intuizioni presentate di seguito miravano a realizzare in maniera controllata le asimmetrie che hanno portato a questo fenomeno così particolare. Fig. 5.7: Fotogrammi estratti dal video dell’attuazione di over buckling ottenuta. Dalla posizione di riposo (fotogramma 1), l’attuatore viene attivato deformandosi dapprima in modo normale (fotogrammi 2,3); successivamente si manifesta l’estroflessione straordinaria in una piccola zona (fotogramma 4) che si trasferisce al resto del materiale (fotogramma 5). Infine la membrana assume in modo elastico la posizione iniziale (fotogramma 6)
51
5.4.1 Film polimerici con variazioni locali di spessore
Abbiamo pensato che si potesse ottenere un effetto di over buckling controllato fabbricando i film di polimeri in modo da riprodurre le asimmetrie dell’attuatore attraverso disomogeneità di spessore oppure per mezzo di un elettrodo non uniforme. La realizzazione di una variazione dello spessore dell’elettrodo risultava difficilmente controllabile; al contrario era più semplice ridurre localmente lo spessore del film. Per ottenere una variazione sono stati utilizzati dischi di materiale di 3-4mm di diametro e di circa 0,2mm di spessore, sia in Teflon che in acciaio. La configurazione adottata è stata quella prevista dal dispositivo con sfera conduttrice, dal momento che su questo dispositivo si era realizzato l’effetto di over buckling, durante una fase di sperimentazione. Il film che ha presentato questo effetto era composto dal 20% di plastificante, 1mm di spessore, e su di essi erano stati realizzati elettrodi di diametro 13mm. L’over buckling si è presentato dopo un sollevamento iniziale normale, quando il film ha manifestato l’attuazione particolare a partire da una piccola area dell’attuatore, ad un potenziale applicato di 13,5kV. In seguito l’over buckling si è trasferito al resto del materiale in modo sufficientemente uniforme. Azzerando il potenziale applicato l’elasticità del film ha consentito un ritorno ottimale alle condizioni iniziali. L’attuatore è stato attivato in un secondo momento ed è stato mantenuto nello stato eccitato per un periodo di tempo superiore. Si è manifestato un over buckling simile al precedente, confermando che fra la prima attuazione e la successiva non c’erano stati cambiamenti dal punto di vista strutturale.
I film con variazione di spessore che sono stati realizzati si basavano sull’idea che le zone a minor spessore potessero essere sottoposte localmente ad un campo elettrico maggiore, e manifestassero un’attuazione di over buckling in grado di trasferirsi successivamente al resto del materiale, creando le condizioni descritte precedentemente in cui la zona esterna fosse di appoggio per l’ulteriore estroflessione locale.
Nella sperimentazione sono stati utilizzati film caratterizzati da una composizione con il 40% di plastificante, in quanto i più vantaggiosi dal punto di vista della deformazione a parità di potenziale applicato, in condizioni normali. Per riprodurre le stesse condizioni iniziali dell’esperimento di over buckling, sono state effettuate
52
alcune prove, anche su materiali più rigidi, con il 20% di plastificante nella composizione.
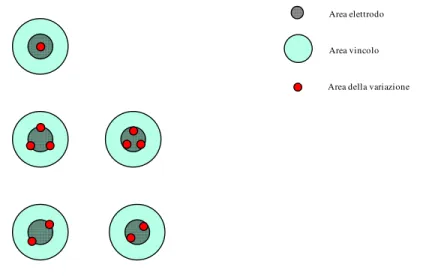
I dischi di Teflon e acciaio sono stati posizionati in varie configurazioni in modo da sfruttare vantaggiosamente eventuali over buckling. Le variazioni di spessore sono state localizzate sia al centro dell’attuatore, sia su una corona circolare più esterna in posizioni simmetriche all’interno dell’elettrodo, e, infine, facendo in modo che la variazione fosse localizzata in una posizione intermedia fra l’elettrodo e il materiale circostante.
Area elettrodo
Area vincolo Area della variazione
Gli attuatori così realizzati non hanno manifestato fenomeni particolari di over buckling e la maggior parte di essi, dopo una minima attuazione, giungeva a rottura precocemente nelle zone con spessore ridotto. Ciò accadeva perché in queste zone, in fase di realizzazione del film, si presentavano microscopiche disomogeneità dovute alla presenza dei dischi di materiale, che determinavano addensamenti di carica. Nelle zone di rottura, comunque, si può sempre notare, anche in condizioni normali, che l’istante immediatamente precedente è caratterizzato da una estroflessione pronunciata e localizzata in una zona puntiforme. Tale zona, in questi casi, non è in grado di distribuire correttamente la deformazione al resto del materiale ed, essendo oltremodo sottile per il campo elettrico applicato, giunge a rottura.
Il problema che determina la rottura in questi provini particolari potrebbe anche risiedere nel fatto che la variazione di spessore nel film sia caratterizzata da una differenza troppo grande e inoltre la discontinuità che si presenta è a gradino. L’idea
Fig. 5.7: Visione dall’alto delle configurazioni adottate per localizzare le variazioni di spessore all’interno della membrana polimerica
53
di creare variazioni di spessore resta per questo valida, in attesa di ulteriori sperimentazioni.
Sezione del film Sezione della variazione
Un miglioramento nelle caratteristiche di film a spessore variabile potrebbe essere ottenuto con variazioni di spessore minori. E’ stato pensato, ad esempio, di utilizzare la resina Cecchi 10-10 fatta reticolare nello spazio racchiuso tra due strati di vetro, distanziati da spessori minimi. I dischi di materiale dovrebbero essere ricavati successivamente dallo strato sottile fabbricato in questo modo e posizionato secondo le configurazioni già descritte.
Sezione del film Sezione della variazione
Fig. 5.8: Visione laterale di una membrana polimerica nella quale è stata inserita una variazione di spessore. Si nota il gradino causato dalla variazione, che determina la rottura precoce del materiale in fase attiva
Fig. 5.9: Visione laterale di una membrana polimerica nella quale è rappresentata una variazione di spessore a forma di cupola a grande raggio
54
Una riduzione della discontinuità della variazione potrebbe essere realizzata utilizzando una sottile lamiera di materiale con una forma a cupola di grande raggio, come rappresentato nella figura 5.9 della pagina precedente.
In questo modo la variazione di spessore sarebbe graduale e si eviterebbero gli addensamenti di carica sugli spigoli del gradino che certamente influiscono sulle caratteristiche del film.
Le variazioni di spessore minori sono state ottenute successivamente in un modo più semplice, utilizzando dei dischi di carta adesiva non porosa, di dimensioni prestabilite e spessore molto ridotto, applicati all’interno dello stampo prima di colare il silicone rispettando i metodi di lavorazione previsti. Il materiale reticolava al di sopra delle disomogeneità senza aderire rendendo possibile il successivo distacco dei film. Al momento attuale è stato realizzato un solo tipo di configurazione, con un disco di variazione di diametro di 14mm, localizzato all’interno dell’area di un elettrodo di 30mm in posizione centrale. E’ interessante provvedere ad una riduzione del disco centrale, per concentrare la variazione in una zona ridotta, e ad una configurazione diversa che determini asimmetria, come quelle proposte nella figura 5.7. Le prove su questo tipo di film non hanno portato a fenomeni particolari di over buckling. Tuttavia hanno introdotto un semplice metodo di controllo di spessore, in quanto è possibile utilizzare due o più dischi di carta adesiva per ottenere una disomogeneità più pronunciata.
5.4.2 Film polimerici con variazioni locali di
composizione
L’idea di base di questa serie di esperimenti era di rendere meno rigida elasticamente la parte centrale dell’attuatore in modo da ottenere un over buckling riproducibile in quella zona, realizzando dei film in cui le variazioni di composizione fossero localizzate. In questo modo, a parità di potenziale, la parte meno rigida dell’attuatore avrebbe ceduto elasticamente, dando inizio all’attuazione particolare che avrebbe poi interessato il resto del materiale.
Per fare ciò, per mezzo di una fustella di diametro 16mm, sono stati ricavati, da film realizzati in precedenza, dei dischi di materiale di spessore 1mm, con il 20%, 40% e 45% di plastificante nella composizione.
55
Le configurazioni prevedevano che fossero fabbricati dei film con una matrice di polimero con il 20% di plastificante nella quale fosse inserito il disco di materiale, con il centro in corrispondenza del centro dell’elettrodo. Il disco doveva avere una composizione con il 40% o il 45% di plastificante. Il film con variazione di composizione è stato ottenuto colando il silicone, secondo il consueto procedimento, nello stampo su cui era stato posizionato in precedenza il disco di materiale differente già reticolato. Al termine della reticolazione, il materiale ottenuto era perfettamente uniforme nella struttura, presentando soltanto una linea di variazione di colore lungo la circonferenza in corrispondenza della discontinuità di composizione visibile ad occhio nudo. Per la realizzazione dell’attuatore utilizzando questo tipo di film è stato seguito il normale processo già descritto. Parallelamente si è pensato di realizzare anche le configurazioni duali, per sfruttare le proprietà di resistenza ad alte differenze di potenziale dimostrate in provini più rigidi, in una configurazione del tutto nuova.
Sono stati realizzati, quindi, film con matrice al 20% e variazione al 40%, qui denominati “40//20”; con matrice al 20% e variazione al 45%, denominati “45//20; e le configurazioni duali con matrice al 40% e al 45% e variazione al 20%, denominati 20//40 e 20//45.
Dalle prime analisi è stato notato un andamento che, per film 40//20 e 45//20, ricalcava molto il comportamento dei normali attuatori al 20% o al 40%. Non è da considerare un loro eventuale utilizzo in quanto la stessa deformazione per film al 40% avviene con differenze di potenziale minori, e l’attuazione può essere sfruttata a partire da potenziali più bassi.
Da un esame dettagliato delle immagini video si è potuto notare che la corona circolare attorno al disco centrale presentava un’attuazione in un istante temporalmente precedente alla zona della variazione, nonostante questa fosse più morbida dal punto di vista meccanico.
L’over buckling che volevamo ottenere con questa configurazione particolare non si è presentato fino a potenziali di 12kV.
Fig. 5.10: Dischi di materiale utilizzati per creare le variazioni di composizione
56
Per i film 20//40 e 20//45 la situazione che si presentava era particolare e differente dagli esperimenti precedenti. Fra i 5kV e gli 8kV l’attuazione che si presentava era caratterizzata da un’espansione della corona circolare attorno alla zona della variazione, mentre il disco centrale non presentava alcun sollevamento. In questo caso si è potuto notare un aumento notevole del raggio di curvatura rispetto alla posizione di riposo.
La corona circolare attuata presentava, inoltre, una superficie ondulata, a causa dell’espansione del materiale in questa zona e il contemporaneo vincolo meccanico dovuto dal disco centrale rigido, che costringeva la corona circolare ad attuare in questo modo particolare.
Lo studio sui film 40//20 e 45//20 ha portato a considerazioni importanti anche a livello teorico. L’attuatore di questo tipo potrebbe essere considerato un punto di partenza per esaminare le forze in gioco nei dispositivi di attuazione ad elastomero dielettrico. Come analizzato dalle immagini, l’attuazione della corona circolare si presentava temporalmente anticipata rispetto a quella della parte centrale. E’ stato ipotizzato che l’attuazione abbia inizio proprio sulla corona circolare, e non al centro dell’attuatore. Successivamente l’attuazione si trasferirebbe al resto del dispositivo. Ciò non succedeva per film 20//40 in quanto il disco centrale, essendo più rigido, si opponeva eccessivamente all’attuazione costringendola quasi completamente alla corona esterna.
Le motivazioni di questo effetto potrebbero consistere nel fatto che la corona circolare esterna non è in contatto con l’emisfera e quindi in quei punti il sollevamento sia facilitato; è da tenere in considerazione, a sostegno di questa tesi, che la superficie attiva esterna è maggiore della superficie centrale che appoggia sul supporto meccanico.
I risultati ottenuti dalle sperimentazioni sui film a variazione di composizione hanno caratteristiche soddisfacenti per la realizzazione di un gripper ad elastomero dielettrico; il notevole aumento del raggio di curvatura rispetto alla posizione di riposo dei film 20//40 e 20//45 è, infatti, utilizzabile per l’afferraggio e il rilascio di componenti.