CAPITOLO II
RETI DI SENSORI
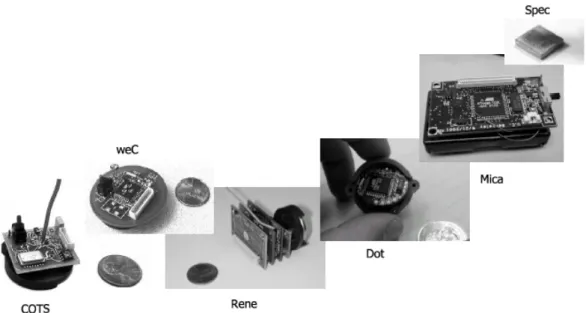
I recenti progressi tecnologici nei sistemi micro-elettro-meccanici (MEMS, micro-electro-mechanical system), nelle comunicazioni wireless e nell’elettronica digitale hanno permesso lo sviluppo di Nodi Sensore (detti anche sensor node), cioè piccoli apparecchi a bassa potenza dai costi contenuti, multifunzionali e capaci di comunicare tra loro tramite tecnologia wireless a raggio limitato [Akan 03] (Figura 2.1 e Figura 2.2 ).
Questi piccoli Nodi Sensore sono formati da componenti in grado di rileva-re percezioni (sensori di posizione, temperatura, umidità ecc…),di elabora-re dati e di comunicaelabora-re tra loro.
Una Rete di Sensori (detta anche Sensor Network) è un insieme di Nodi Sensore disposti in prossimità oppure all’interno del fenomeno da osser-vare. Infatti, una delle più comuni applicazioni in cui è possibile far uso di una Rete di Sensori è quella di monitorare ambienti fisici come ad esem-pio controllare il traffico in una grande città oppure raccogliere dati da un’area disastrata da un terremoto [Bonnet 00].
I Nodi Sensore all’interno di una rete hanno la caratteristica di cercare di collaborare tra loro. I nodi sono infatti provvisti di un processore on-board; quindi, ciascun nodo, invece di inviare dati “grezzi” ai nodi responsabili del raccoglimento dei dati, può effettuare delle semplici elaborazione e tra-smettere solo i dati richiesti e già processati. [Akyildiz 02]
Figura 2.2:Mica Mote e Mica2Dot Mote realizzati alla Berkeley University
Le Reti di Sensori possono essere utilizzate in molte applicazioni; la rea-lizzazione di queste applicazioni richiede l’uso di tecniche utilizzate nelle reti wireless ad hoc. Comunque, molti degli algoritmi usati nelle reti ad hoc non sono compatibili con i requirement di questo tipo di reti. I principali motivi sono[Akan 03]:
• Il numero di nodi che compongono una Rete di Sensori può essere di alcuni ordini di grandezza più grande del numero di nodi in una rete ad hoc;
• I Nodi Sensore sono disposti con un’alta densità; • I Nodi Sensore sono soggetti a fallimenti;
• La topologia di una Rete di Sensori cambia frequentemente;
• I Nodi Sensore usano un paradigma di comunicazione broadcast mentre la maggior parte delle reti ad hoc sono basate su una co-municazione di tipo point-to-point;
• I Nodi Sensore sono limitati per quanto riguarda l’alimentazione, le capacità di calcolo e la memoria;
• I Nodi Sensore possono non avere un identificatore globale (ID). Le operazioni applicabili ad una Rete di Sensori possono essere classifi-cate, secondo [Jaikaeo], in due categorie: querying e tasking. Nelle nostre Reti Sensoriali assumiamo che ci sia una (o più) entità speciale chiamata
nodo SINK che agisce come nodo gateway. Un utente specifica al nodo
Sink di quali informazioni ha bisogno. Il Sink genera una interrogazione che viene poi iniettata nella rete. Una o più risposte sono mandate indietro al Sink il quale colleziona e processa queste risposte prima di fornire il ri-sultato finale all’utente.
Le Reti di Sensori sono modellate come dei database distribuiti. Il recupe-ro di informazioni è effettuato tramite un linguaggio simile all’SQL. Il fluire delle informazioni dipende dal meccanismo di elaborazione interno del database.
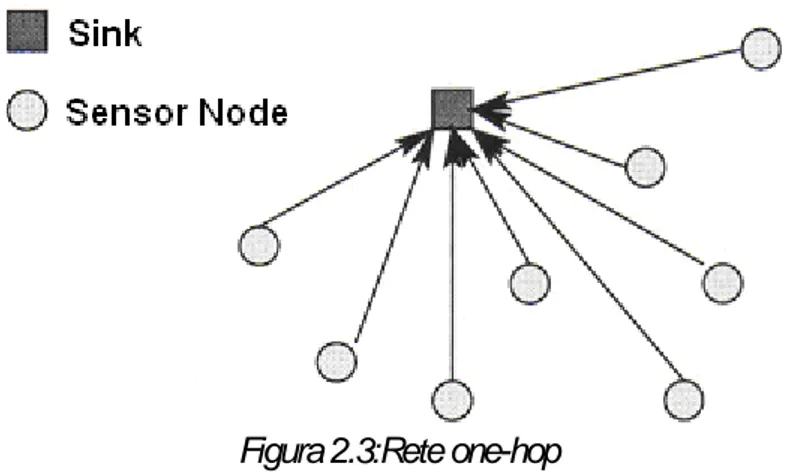
La cosa più semplice sarebbe quella di lasciare al nodo Sink il compito di collezionare tutte le informazioni da ciascun Nodo Sensore e quello dell’elaborazione dei dati (Figura 2.3).
Questa cosa è però impraticabile per diversi motivi:
• Gli ack che il Sink è costretto a mandare ai vari Nodi Sensore rap-presenterebbero un collo di bottiglia nel caso in cui il numero di No-di Sensore aumentasse;
• I Nodi Sensore usano, per interagire tra loro, una comunicazione wireless. Alcuni nodi posizionati lontano dal Sink non potrebbero essere in grado di comunicare direttamente con questo a causa della limitata potenza di trasmissione a disposizione.
Figura 2.3:Rete one-hop
Quindi, non dobbiamo modellare una Rete di Sensori come un database distribuito dove tutti i nodi sono passivi, ma invece come un insieme distri-buito di nodi che collaborano tra loro e dove ciascuno ha capacità attive programmabili. Questo permette a tutti i nodi di coordinarsi l’uno con l’altro per eseguire un task assegnato. In questo modo i Nodi Sensore diventano attivi e autonomi. Ad esempio i nodi possono collaborare come riportato nella Figura 2.4.
I Nodi Sensore sono sparpagliati in un nell’area di sensing. Ciascun nodo ha la capacità di accumulare e di instradare i dati fino al nodo Sink ed infi-ne all’utente finale. Il nodo Sink può comunicare con il task manager Node via internet o via satellite come mostrato in
Figura 2.5 . [Akyildiz 02]
Figura 2.5: Rete di Sensori
La posizione dei nodi all’interno della rete non deve essere pre-determinata in quanto questo consente di utilizzare questa tecnologia in posti difficilmente accessibili o in operazioni di soccorso in luoghi disastrati per i quali è necessaria una disposizione random dei nodi. Ciò significa che gli algoritmi e i protocolli utilizzati nelle Reti di Sensori devono posse-dere capacità auto organizzative.
2.1 Fattori che influenzano la progettazione di una Rete di
Sensori
La progettazione di una Rete di Sensori dovrebbe essere influenzata da molti fattori [Akyildiz 02].
2.1.1 Tolleranza ai guasti
Alcuni nodi della rete possono fallire o guastarsi a causa di batterie scari-che, danni fisici o interferenze. La tolleranza ai guasti è la capacità di far funzionare una Rete di Sensori anche in caso di fallimento da parte di al-cuni nodi.
La tolleranza ai guasti (o affidabilità) Rk(t) di un nodo k è modellata tramite
una distribuzione di Poisson ed è vista come la probabilità di non avere fallimenti nell’intervallo (0,t); quindi:
kt k
t
e
R
(
)
=
−λ (2.1)Dove λk è il tasso di fallimento del Nodo Sensore k.
I protocolli e gli algoritmi possono essere progettati in modo da garantire il livello di tolleranza ai guasti richiesto dalla rete. Il livello di tolleranza di-pende fortemente dall’applicazione in cui viene utilizzata la Rete di Senso-ri (uso domestico , uso bellico o altro).
2.1.2 Scalabilità
Il sistema deve essere in grado di funzionare anche all’aumentare del numero di nodi (si va da poche unità fino a qualche milione di sensori). La scalabilità può essere ottenuta anche sfruttando la natura densa delle Reti di Sensori. La densità di nodi in una Rete di Sensori risulta application dependent e può variare da pochi a qualche centinaia di nodi in una re-gione che può essere meno di 10 m di diametro.
La densità,cioè il numero di nodi presenti all’interno del raggio di trasmis-sione di un nodo, può essere calcolata nel seguente modo:
(
)
2
)
(
2R
N
R
π
µ
=
(2.2)dove N è il numero di nodi sparpagliati in una regione di area A ed R è il raggio di trasmissione di un nodo.
2.1.3 Costi di produzione
Poiché una Rete di Sensori è formata da un grande numero di nodi, il co-sto di un singolo nodo è molto importante. Se il coco-sto della rete è maggio-re rispetto all’utilizzo dei sensori tradizionali allora l’uso di una Rete di Sensori non è giustificabile. Il costo di un Nodo Sensore dovrebbe perciò
essere inferiore ad 1 dollaro. Questo è un obbiettivo non molto facile da raggiungere in quanto attualmente solo il prezzo di una radio buetooth (che è considerato un apparecchio economico), è almeno 10 volte supe-riore al prezzo obbiettivo sopra indicato. Un nodo ha anche altre unità co-me un processore o un campionatore; inoltre in alcune applicazioni può essere necessario equipaggiare un nodo con un sistema di posizionamen-to globale (GPS). Tute queste cose portano ad un incremenposizionamen-to del cosposizionamen-to di un singolo Nodo Sensore. La previsione è comunque che questi oggetti verranno a costare meno di un dollaro a partire dal 2005 [Hill 03].
2.1.4 Ambiente operativo
I Nodi Sensore sono disposti molto vicino o addirittura all’interno del fe-nomeno da osservare. Perciò, spesso, si trovano a lavorare in zone geo-grafiche remote (es: all’interno di un macchinario, in fondo all’oceano, sul-la superficie dell’oceano durante un tornado, in una zona biologicamente o chimicamente contaminata, in un campo di battaglia ecc..) e senza la su-pervisione di umani. Tutto ciò da un’idea delle condizioni sotto le quali i Nodi Sensore devono essere capaci di funzionare (devono sopportare alte pressioni se lavorano in fondo all’oceano, alte o basse temperature ecc..)
2.1.5 Topologia della Rete di Sensori
Un gran numero di nodi sono disposti l’uno accanto all’altro a volte anche con un’alta densità. Questo richiede un’attenta attività per il mantenimento della topologia. Il mantenimento e il cambiamento della topologia può es-sere diviso in tre fasi:
Pre-deployment e deployment phase. I Nodi Sensore possono essere sia gettati sia disposti uno ad uno nell’ambiente; infatti possono essere dispo-sti in vari modi: gettati da un aereo, da una catapulta, collocati uno ad uno da un robot o da una persona umana.
Post-deployment phase. I cambiamenti topologici della rete sono dovuti al cambiamento della posizione dei nodi, oppure alla variazione della rag-giungibilità di un nodo, dell’energia disponibile, di malfunzionamenti ecc…
Re-deployment of additional nodes phase. Nodi Sensore addizionali pos-sono essere ridisposti in qualsiasi momento per rimpiazzare i nodi malfun-zionanti o a causa della dinamica dei task. L’aggiunta di nuovi nodi com-porta la necessità di riorganizzare la rete. L’alta frequenza di cambiamenti topologici e il vincolo stringente del risparmio energetico richiedono proto-colli di routing molto particolari.
2.1.6 Vincoli hardware
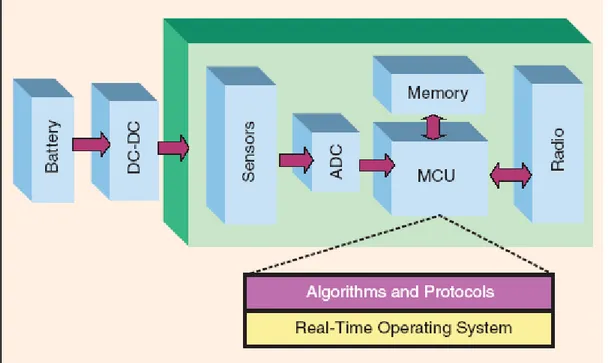
Un Nodo Sensore è composto da quattro unità base (Figura 2.6)
Unità di sensing: di solito è composta da due sotto unità: sensore e con-vertitore da analogico a digitale.
Unità computazionale. Di solito è associata ad una piccola unità di imma-gazzinamento dati e gestisce le procedure che permettono la collabora-zione del nodo con gli altri nodi della rete per portare a termine il task as-segnato.
Unità transceiver. È l’unità che connette il nodo alla rete. Può essere un apparecchio ottico (usato nei smart dust motes) oppure un apparecchio a radio frequenza (RF). È possibile usare anche delle radio con basso duty-cycle anche se attualmente ci sono problemi nell’usare questi apparecchi in quando viene consumata molta energia per le operazioni di spegnimen-to.
Unità energetica: È forse il componente più importante di un Nodo Senso-re; a volte può essere supportata da una unità per il recupero di energia ad esempio da fonte solare.
Nella Tabella 2.1 sono riportate alcune caratteristiche dei componenti hardware del mica mote e del mica2 mote. Per maggiori dettagli riguar-danti i MICA2 mote e i MICA2 DOT mote fare riferimento a [CROSSBOW] oppure al sito web www.xbow.com .
Nella Figura 2.7 sono messe in rilievo le componenti hardware di un Mica Mote: in rosso è evidenziata la CPU, in giallo la Radio, in blu il connettore di espansione (51 pin) per collegarci i sensori, in verde i sensori luminosi mentre in turchese le batterie (2-AA).
Figura 2.6:Componenti hardware di un Nodo Sensore
Characteristic MICA MICA2
CPU Type Atmel 128 Atmel 128
CPU Frequency 4 Mhz 8 Mhz
CPU Data Memory 4 KB 4 KB
CPU Program Memory 128 KB 128 KB
Radio Type RFM TR1000 ChipCon
Radio Frequency 917 Mhz 917 Mhz, 433 Mhz
Radio Throughput 40 Khz 39,2 Khz
Flash Type Atmel AT45DB41 Atmel AT45DB041
Flash Capacity 512 KB 512 KB
Flash Write Time 10 ms/ 256 bytes 10 ms/ 256 bytes
Flash Read Time 10µs/ 256 bytes 10µs/ 256 bytes
Figura 2.7:Mica Mote, rilievo componenti hardware
2.1.7 Mezzo di trasmissione
In una Rete di Sensori multihop i nodi possono interagire tra loro tramite un mezzo di comunicazione wireless. È quindi possibile utilizzare onde ra-dio. Una possibilità è quella di usare bande ISM (industrial, scientific and medical), cioè un gruppo pre-definito di bande che in molti paesi sono li-cence-free. La maggior parte dei Nodi Sensore attualmente in commercio fanno uso di un circuito RF.
Un altro possibile modo per far comunicare i nodi è tramite gli infrarossi. La comunicazione con gli infrarossi è licence-free e robusta ad interferen-ze. I transceiver basati sugli infrarossi sono economici e facili da costruire. Il problema maggiore che si ha nell’uso degli infrarossi è la necessità di avere un interfacciamento diretto tra il sender e il receiver. Questa cosa li rende di difficile utilizzo nelle Reti di Sensori dove solitamente i nodi sono disposti in modo random.
La scelta del mezzo trasmissivo è imposta dall’applicazione: ad esempio applicazioni marine impongono di usare l’acqua come mezzo trasmissivo. È quindi necessario usare onde che possano penetrare nell’acqua.
2.1.8 Consumo Energerico.
Un Nodo Sensore è dotato di una limitata sorgente di energia (< 0.5 Ah, 1.2 V). Il tempo di vita di un Nodo Sensore dipende molto dal tempo di vita
della batteria. In una Rete di Sensori ogni nodo ha il ruolo sia di generare dati che di ricevere dati, perciò la scomparsa di alcuni nodi può portare a significativi cambiamenti topologici che possono richiedere una ri-organizzazione della rete e del routing. È per queste ragioni che molte ri-cerche si stanno concentrando sulla creazione di protocolli e algoritmi power-aware, cioè protocolli che ottimizzano il consumo energetico.
Mentre nelle Reti Mobili e nelle Reti ad-hoc il consumo di energia è un im-portante fattore ma non il principale ( che risulta invece il soddisfacimento della QoS, cioè della qualità del servizio) nelle reti sensoriali il consumo di energia è la principale metrica per valutare le performance: questo perché nelle altre reti è possibile ricaricare o cambiare le batterie dei nodi mentre nelle reti sensoriali una volta che la batteria termina il nodo è da conside-rarsi morto.
Il consumo di energia in un Nodo Sensore è essenzialmente dovuto alle tre principali attività svolte dal nodo:
• Sensing: la potenza necessaria per effettuare il campionamento di-pende dalla natura dell’applicazione;
• Communication: dei tre fattori è quello che necessita della maggior quantità di energia. La comunicazione comprende sia la ricezione che la trasmissione di dati i cui costi energetici possono essere rite-nuti uguali;
• Data processing:l’energia spesa nel processare i dati è molto picco-la se comparata a quelpicco-la spesa per picco-la comunicazione.
2.2 Consumo energetico in una Rete di Sensori
[Raghunathan 02] Il punto su cui è necessario focalizzare l’attenzione è sulla stima e l’ottimizzazione del consumo di una Rete di Sensori. Questo perché i nodi di una Rete di Sensori sono battery-driven e in molti casi de-vono funzionare per mesi o anni in quanto non è possibile effettuare il ri-cambio delle batterie a migliaia di nodi embedded. Addirittura in molti casi
dall’ambiente operando attraverso conversioni sismiche, fotovoltaiche o termali.
L’ottimizzazione del consumo energetico, nel caso di una Rete di Sensori, risulta molto complesso in quanto non si tratta di ridurre il consumo di e-nergia di un nodo ma di massimizzare il tempo di vita di un’intera rete. Per fare questo è necessario che il sistema sia capace di effettuare dei com-promessi tra il consumo di energia, le prestazioni e la fedeltà delle opera-zioni svolte.
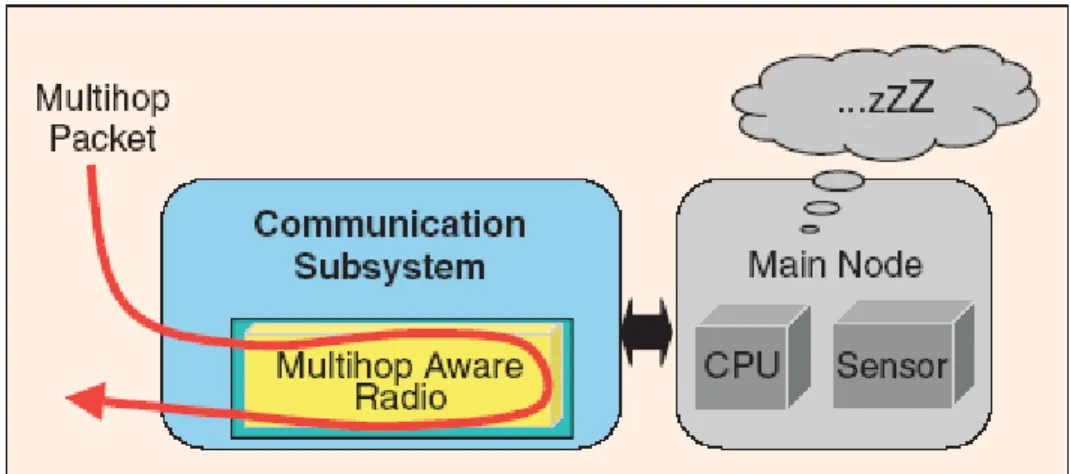
Una prima cosa da tenere di conto è che, oltre a campionare e comunica-re i propri dati agli altri nodi, un Nodo Sensocomunica-re agisce anche come router effettuando l’inoltro di pacchetti diretti ad altri nodi. Tipicamente circa il 65% di tutti i pacchetti ricevuti da un nodo devono essere inoltrati ad altri nodi.
Figura 2.8:Sottosistema di comunicazione per il forwarding di pacchetti
Di solito l’architettura di un Nodo Sensore prevede che le elaborazioni da svolgere per l’inoltro di pacchetti siano effettuate nella CPU principale; quindi, ogni pacchetto ricevuto da un nodo attraversa tutto il sottosistema computazionale indipendentemente dal fatto che il pacchetto sia destinato all’inoltro o meno. Questo porta ad un grande overhead dal punto di vista energetico.
Poiché le computazioni da fare nel caso di inoltro di pacchetti sono molto semplici, è sufficiente aggiungere un po’ di intelligenza al sottosistema di
comunicazione per far sì che i pacchetti in arrivo che devono essere inol-trati siano riconosciuti e inolinol-trati dal sottosistema di comunicazione stesso (Figura 2.8).
Analizziamo adesso uno ad uno i componenti hardware che compongono un Nodo Sensore cercando di mettere in evidenza quali sono i fattori che influiscano sul consumo energetico.
2.2.1 Unità Computazionale
Fornisce l’intelligenza al nodo ed è responsabile del controllo dei sensori, dell’esecuzione dei protocolli di comunicazione e dell’algoritmo di elabora-zione dei dati raccolti dai sensori.
Di solito sono usati:
• Processore StrongArm dell’Intel • Microcontrollore AVR dell’Atmel
La scelta del tipo di elaboratore è dettata dalle prestazioni richieste dall’applicazione ma questo ha anche delle forti ripercussioni sul consumo di energia. Ad esempio, il microprocessore dell’Intel (usato in sensori di al-to livello) consuma circa 400 mW mentre il microcontrollore dell’Atmel ATmega103L AVR consuma solo 16.5 mW ma ha prestazioni molto infe-riori rispetto all’altro.
Inoltre, le unità computazionali di solito supportano diverse modalità di funzionamento tra cui: modalità attiva, idle e sleep (ad es: lo strongArm
consuma 50mW in modalità idle e solo 0.16mW in modalità sleep).
Dob-biamo comunque considerare che il passaggio da un modo di funziona-mento ad un altro comporta un overhead di consumo e di latenza.
Negli ultimi anni sono stati realizzati microprocessori e microcontrollori a basso consumo (low-power). Oltre all’uso di componenti hardware low-power sono stati sperimentati due tecniche:
• DPM (Dynamic Power Management) è possibile ridurre notevol-mente il consumo di energia ad esempio effettuando lo shutdown dei componenti che si trovano nello stato idle. Il Nodo Sensore (o parti di esso) viene cioè spento o messo in uno stato di basso
con-tecnica è il fatto che la decisione sulla convenienza di spengere un dispositivo idle è influenzata anche dal fatto che una transizione dello stato del dispositivo comporta un consumo energetico e un overhead di tempo non trascurabili;
• DVS (Dynamic Voltage Scaling): la maggior parte dei microproces-sori hanno un carico computazionale che varia nel tempo e perciò non sempre è necessario che il microprocessore lavori al massimo delle prestazioni (e quindi dei consumi). DVS sfrutta questa caratte-ristica adattando dinamicamente sia il voltaggio fornito al processo-re che la fprocesso-requenza di lavoro del dispositivo cercando, quindi, un compromesso tra le prestazioni e il risparmio di energia. Molti pro-cessori moderni, come lo StrongARM dell’Intel e il Crusoe della Transmeta, adottano questo metodo fornendo perciò una manopola per il controllo della coppia energia-prestazioni.
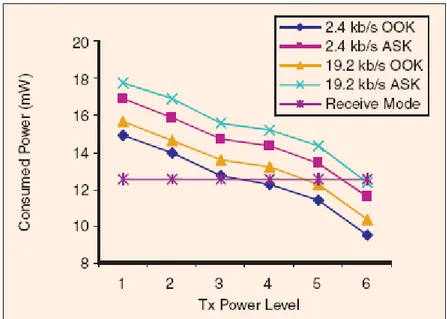
2.2.2 Unità Transceiver
La radio permette la comunicazione wireless con i nodi confinanti. Molti fattori determinano il consumo di energia della radio tra cui il tipo di modu-lazione usato, il rate di trasmissione dei dati, la potenza di trasmissione (che determina il raggio di trasmissione) ed il duty-cycle operazionale. In generale la radio può operare in diverse modalità: trasmissione, ricezio-ne, idle, sleep. Una considerazione da fare è che una radio che si trova in modalità idle (cioè che non fa niente) consuma circa la stessa potenza della modalità ricezione, perciò è importante spengere la radio quando non si stanno ne trasmettendo ne ricevendo dati. Come per le CPU si ha una dissipazione di potenza anche nei cambi di modalità di funzionamen-to.
2.2.3 Unità di Sensing
I sensori traducono i fenomeni fisici in segnali elettrici e possono essere classificati come analogici o digitali a seconda del tipo di output che pro-ducano. Esistono diversi sensori per misurare i parametri dell’ambiente
come temperatura, luce, intensità del suono, campi magnetici, immagini ecc..
Il consumo di energia in un sensore è dovuto a diversi fattori come ad e-sempio il campionamento e la conversione di segnali fisici in segnali elet-trici.
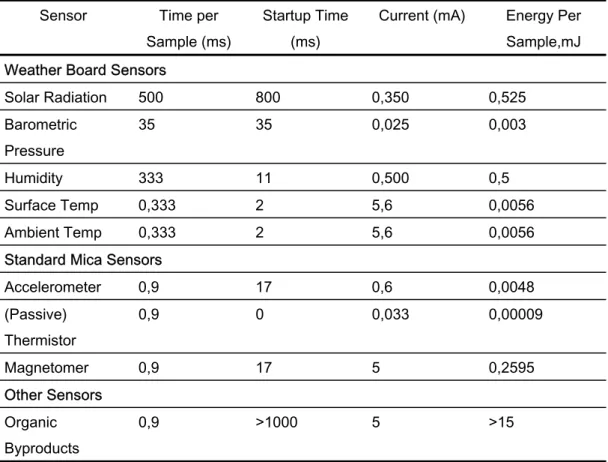
In generale i sensori passivi (per misurare ad esempio temperatura, scos-se sismiche ecc…) hanno un consumo molto basso mentre scos-sensori attivi (tutti quei sensori che richiedano un riposizionamento come ad esempio una telecamera con uno zoom) hanno un consumo maggiore (Tabella 2.2).
2.2.4 Unità Energetica
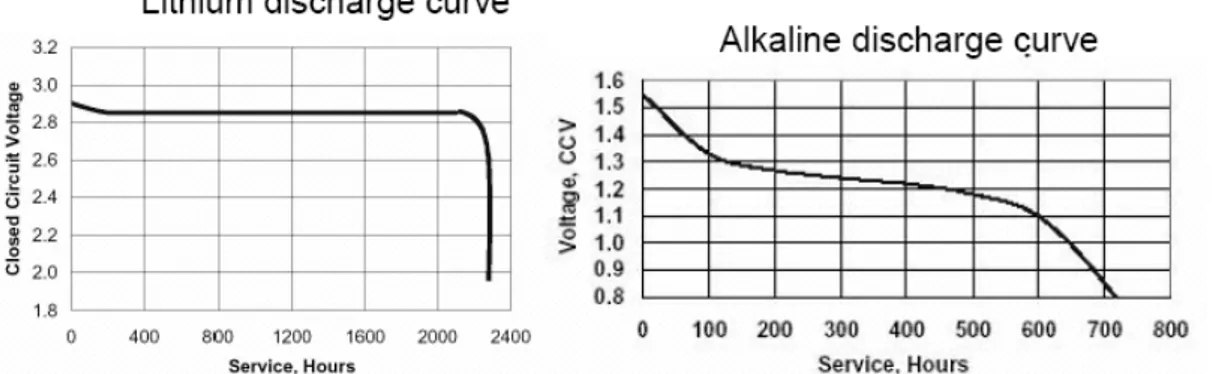
La batteria fornisce potenza all’intero Nodo Sensore e perciò ricopre un ruolo fondamentale nel determinare il tempo di vita di un Nodo. Le batterie sono dei dispositivi molto complessi il cui funzionamento dipende da una grande quantità di fattori (dimensione della batteria, tipo di materiale usato per gli elettrodi, tasso di diffusione dei componenti attivi negli elettroliti). La Figura 2.9 mostra l’andamento della scarica di una batteria al litio e alcali-na.
Ci sono alcune situazioni che possono ridurre o aumentare la durata della batteria:
• Rated Capacity Effect. Uno dei maggiori fattori che incide sulla durata di una batteria è il tasso di scarica o la quantità di corrente erogata dal-la batteria. Il valore di questa quantità viene indicato daldal-la manifatturie-ra. Una erogazione di corrente superiore a quella indicata porta ad una riduzione della vita della batteria. Se una grande corrente è erogata dalla batteria, allora il tasso al quale gli ingredienti attivi si diffondono attraverso gli elettrodi scende al di sotto del tasso al quale si consu-mano sugli elettrodi. Se l’alto tasso di scarica è mantenuto per molto tempo gli elettrodi rimangono fuori dai materiali attivi, portando alla morte della batteria sebbene i materiali attivi siano ancora presenti su-gli elettrodi.
Perciò, per evitare una degradazione precoce della batteria, è neces-sario mantenere sotto una determinata soglia la quantità di corrente erogata dalla batteria: questa soglia dipende dal tipo di batteria (ioni di litio, NiMH, NiCd, alcaline, ecc…)
Sensor Time per
Sample (ms)
Startup Time (ms)
Current (mA) Energy Per Sample,mJ Weather Board Sensors
Solar Radiation 500 800 0,350 0,525 Barometric Pressure 35 35 0,025 0,003 Humidity 333 11 0,500 0,5 Surface Temp 0,333 2 5,6 0,0056 Ambient Temp 0,333 2 5,6 0,0056
Standard Mica Sensors
Accelerometer 0,9 17 0,6 0,0048 (Passive) Thermistor 0,9 0 0,033 0,00009 Magnetomer 0,9 17 5 0,2595 Other Sensors Organic Byproducts 0,9 >1000 5 >15
Tabella 2.2:Caratteristiche dei più comuni sensori
• Relaxation Effect. L’effetto di una grande scarica può essere mitigato da una estensione tramite il rilassamento della batteria (battery relaxa-tion). Se la corrente di scarica della batteria viene eliminata o ridotta, il tasso di diffusione e di trasporto dei materiali attivi aumenta con lo svuotamento causato dalla scarica. Tale fenomeno permette alla batte-ria di recuperare una parte della sua capacità persa. Quindi la durata di una batteria può essere aumentata significativamente se la corrente erogata viene frequentemente ridotta a valori molto bassi o è comple-tamente azzerata.
2.2.5 Convertitore DC-DC
È responsabile della fornitura di un voltaggio costante al resto del Nodo Sensore. Il fattore di efficienza associato al convertitore gioca un ruolo fondamentale nel determinare la durata di una batteria. Un basso fattore di efficienza significa che una significativa parte di energia viene persa nel convertitore.
Inoltre il voltaggio presente tra i terminali della batteria diminuisce costan-temente man
mano che la batteria si scarica. Il convertitore deve quindi estrarre una quantità sempre maggiore di corrente dalla batteria per mantenere una tensione costante sul nodo. La Figura 2.10 mostra la differenza tra la cor-rente erogata dalla batteria al convertitore e la corcor-rente fornita dal conver-titore al nodo per una batteria agli ioni di litio. Le varie curve si riferiscono a diverse modalità di funzionamento del nodo (sulle ascisse troviamo la potenza fornita dal convertitore al nodo mentre sulle ordinate la potenza consumata dalla batteria).
2.3 APPLICAZIONI PER RETI DI SENSORI
Una Rete di Sensori può essere vista come un insieme di sensori di diver-so tipo capaci di rilevare grandezze come temperatura, umidità, pressione, luce, ma anche capaci di rilevare il movimento di veicoli, la composizione del terreno, livello di rumore e molte altre cose.
È possibile classificare le applicazioni in cui usare le Reti di Sensori in 5 categorie: militari, ambiente, salute, domestiche e commerciali [Akyildiz 02].
Figura 2.10:Corrente erogata dalla batteria e corrente trasmessa alla radio
2.3.1 APPLICAZIONI MILITARI
Il rapido dispiegamento, l’auto-organizzazione e la tolleranza ai guasti fanno una Rete di Sensori una promettente tecnica per il campo militare. Poiché una Rete di Sensori è basata su una densa disposizione di nodi monouso ed a basso costo, la distruzione di alcuni nodi da parte del nemi-co non danneggia le operazioni militari nemi-come potrebbe accadere nemi-con la di-struzione dei tradizionali sensori. Le possibili applicazioni vanno dal moni-toraggio di forze alleate, equipaggiamenti e munizioni alla sorveglianza del campo di battaglia. Oppure, sempre nel campo militare, è possibile usare
una Reti Sensori per effettuare il riconoscimento di nemici , la stima dei danni di una battaglia oppure per il riconoscimento del tipo di un attacco: nucleare, biologico o chimico.
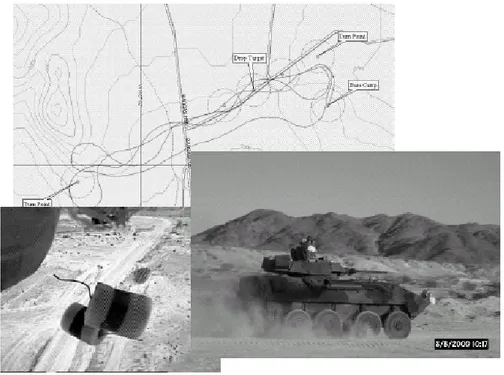
La Figura 2.11 mostra i sensori che vengono gettati da un aeroplano e che, autorganizzandosi, sono in grado di monitorare l’attività di veicoli mili-tari in una zona deserta.
Figura 2.11:Reti di Sensori utilizzate in ambiente militare
2.3.2 APPLICAZIONI AMBIENTALI
Alcune applicazioni ambientali riguardano ad esempio il monitoraggio del movimento di uccelli, piccoli animali,insetti. È possibile anche effettuare il monitoraggio di una foresta e rilevare prontamente eventuali incendi. Negli Stati Uniti è stato messo a punto un sistema per la predizione e rile-vazione di inondazioni: questo sistema si chiama ALERT SYSTEM (sito web http://alert.dot.pima.gov) ed è formato da molti sensori in grado di ri-levare la quantità di pioggia caduta, il livello dell’acqua di un fiume e le condizioni climatiche come ad esempio la temperatura, l’umidità ecc.. Le Reti di Sensori possono essere utilizzate anche nell’agricoltura di
pre-sibile raggiungere è quello di monitorare il livello dei pesticidi nell’acqua, il livello di erosione del terreno e il grado di inquinamento dell’aria: il tutto ef-fettuato in tempo reale.
Altra applicazione è quella del monitoraggio dell’habitat di animali
[Mad-den ACQP]. Il Petrel è un comune uccello notturno che trascorre la
mag-gior parte della sua vita in mare tranne che per piccoli periodi di tempo in cui fa ritorno sulla terra per nidificare e per riprodursi: l’isola Great Duck ( vedi Figura 2.13), nel Canada, è uno di questi posti. Ogni anno gli uccelli fanno ritorno negli stessi nidi usati negli anni precedenti. Durante l’estate del 2002 alcuni ricercatori hanno piazzato dei Nodi Sensore nei nidi prima del ritorno degli uccelli e hanno registrato dati dai sensori (pressione, umi-dità, intensità della luce, temperatura ecc…) prima che arrivassero gli uc-celli , durante la loro permanenza e dopo la loro partenza (sito web: www.greatduckisland.net ). Per una descrizione molto dettagliata di tutta l’attività di monitoring effettuata su questa isola fare riferimento a [Polastre].
Figura 2.13:Isola di Great Duck, Canada
[Madden Thesis]Nel Giugno e Luglio 2002 alcuni Nodi Sensore sono stati disposti nel giardino botanico dell’università di Berkeley. Lo scopo di que-sta disposizione era quello di monitorare il microclima intorno alle sequoie del giardino. La Figura 2.14 mostra come sono stati disposti i nodi su una sequoia di 35 metri: sono stati utilizzati 16 sensori disposti su 5 altezze di-verse.
2.3.3 APPLICAZIONI MEDICHE
Gli utilizzi delle Reti di Sensori in questo campo sono rivolte al fornire un’interfaccia per le persone affette da handicap, al monitoraggio di dati fisiologici (riguardanti umani), delle condizioni dei pazienti in un ospedale e della posizione del medico (per una facile rintracciabilità). È anche pos-sibile usare sensori per identificare allergie.
2.3.4 APPLICAZIONI DOMESTICHE
Un esempio di utilizzo di una Rete di Sensori in ambito domestico è l’automazione della casa che consiste nell’inserire sensori nel forno, aspi-rapolvere, refrigeratore, videoregistratore ecc.. Questi nodi , inseriti negli apparecchi domestici, possono interagire l’uno con l’altro e anche con reti
Figura 2.14:Botanical Garden nell’Università di Berkeley: disposizione dei Nodi Sensore su una sequoia
2.3.5 APPLICAZIONI COMMERCIALI
Museo interattivo: in futuro i bambini potranno interagire con gli oggetti esposti in un museo. Questi oggetti saranno capaci di rispondere alle ri-chieste dei bambini ed inoltre i bambini potranno essere resi partecipi di esperimenti di causa-effetto eseguiti in tempo reale. Inoltre , una Rete di Sensori può fornire un servizio di localizzazione all’interno del museo Rilevamento del furto di auto: Nodi Sensore sono stati disposti per scopri-re e identificascopri-re minacce che avvengono in una determinata zona
geogra-fica. Tutte le informazioni rilevate sono inviate, tramite internet, agli utenti finali per essere analizzate e per prendere i giusti provvedimenti.
Rilevamento della posizione e del movimento di veicoli (car tracking): tra-mite una Rete di Sensori è possibile monitorare la posizione di un’auto in movimento [Jaikaeo]. È inoltre possibile monitorare il traffico su strade par-ticolarmente transitate (Figura 2.15).
Controllo dell’ambiente in ufficio : di solito il sistema di gestione del riscal-damento o dell’aria condizionata è centralizzato e quindi la temperatura in ufficio può essere diversa a seconda della zona (una parte più calda e una parte più fredda) in quanto il controllo della temperatura e il flusso dell’aria è centralizzato (esiste un solo termometro e un solo bocchettone da dove esce l’aria). Con una Rete di Sensori nella stanza è possibile controllare la temperatura e la distribuzione dell’aria calda nelle varie zone della stanza.