4.
CAPITOLO 4
ANALISI DEI DATI RACCOLTI
In questo capitolo verranno presentati i risultati raccolti durante le prove in mare intro-dotte nel capitolo 3.
I dati meccanici presentati sono stati annotati durante l’effettuazione delle prove (misure di forza e tempistiche di rilascio e recupero).
I segnali acustici analizzati, sono stati registrati in doppia modalità: una ha consentito di memorizzare il segnale proveniente da una singola stecca di idrofoni, scelta al centro dell’array, quindi prima del beamformer; l’altra è la registrazione dopo il beamfomer.
Il percorso seguito nelle analisi dei dati, è volto a validare una procedura di misura del rumore irradiato ed a verificarne la correttezza.
In particolare, le prove meccaniche hanno consentito di verificare il corretto funziona-mento del sistema di rilascio e di recupero del TAS, presupposto essenziale per l’effettuazione di tutte le misurazioni.
Le prove idrodinamiche hanno consentito di verificare il comportamento del sensore in acqua, l’assenza di vibrazioni, l’assetto, il funzionamento dei sensori di posizionamento (profondimetri e bussole). Il fatto che il sensore sia teso in acqua e non presenti vibrazioni durante il traino è di fondamentale importanza per ritenere attendibili i dati acustici regi-strati all’uscita del beamformer. È inoltre necessario identificare la velocità minima di trai-no, che assicura un corretto posizionamento dell’antenna in acqua.
Le prove di flow noise hanno avuto un doppio scopo. Il primo ha valenza scientifica, e-stranea agli scopi della presente tesi, ed ha consentito di verificare la dipendenza del flow noise dalla profondità. Il secondo, valido agli scopi del presente lavoro, è di identificare un limite superiore della velocità do traino per l’effettuazione delle prove di rumore irradiato.
Tale limite è la velocità per la quale il livello di flow noise inizia a crescere, superando il livello di rumore ambientale.
La presentazione della prova di rumore irradiato implica l’analisi di tre tipi di dato. I da-ti geografici relada-tivi alla cinemada-tica ed alla geometria delle misure, i dada-ti relada-tivi al rappor-to segnale rumore ed infine i dati relativi alla caratterizzazione acustica vera e propria del semovente preso in esame.
L’analisi dei dati geografici ha consentito di dimostrare che è possibile una ricostruzio-ne delle geometrie della prova di rumore irradiato a posteriori, ed è servita a comprendere l’esatta dinamica delle manovre condotte durante la prova.
La costruzione del rapporto segnale rumore ha permesso un approfondimento di quanto evidenziato dai dati geografici, consentendo di verificare, in ogni istante, la presenza di una sufficiente potenza di segnale utile, tale da consentire un’analisi della segnatura acustica di un semovente marino secondo gli standard adottati nelle attuali procedure di misura del rumore irradiato, ovvero con un rapporto segnale rumore superiore a 6 dB.
Vengono infine riportati i dati finali della prova, ovvero la segnatura acustica dell’unità navale campione.
4.1. Prove Meccaniche
Le prove meccaniche sono state un essenziale presupposto per l’utilizzo del Towed Ar-ray System. Infatti, trattandosi di un apparato non ancora collaudato a bordo dell’unità trainante, è stato necessario verificare il corretto funzionamento del sistema di rilascio e di recupero. Qualora la verifica non avesse dato esito positivo, le fasi successive dell’esperimento non avrebbero potuto avere luogo.
Per la conduzione delle prove è stato predisposto un sistema di videosorveglianza, costi-tuito da tre telecamere in grado di monitorare, durante il funzionamento, il winch, la guide wheel e la parte finale del retractable spur.
Il sistema di videosorveglianza, installato a scopo di dare evidenza della correttezza del-le operazioni di rilascio e recupero, è stato di ausilio per il confronto visivo di dati acquisiti da particolari sensori di forza, di pressione, di controllo dei motori di winch, guide wheel e scouring device e di misura della velocità di movimentazione dell’array.
Attraverso i suddetti sensori e confrontando i dati misurati con le immagini fornite dal sistema di videosorveglianza, si è potuto investigare il comportamento del TAS-WS.
In particolare, dall’im-magine riportata in fig. 4.2, (riquadro giallo), si nota la vicinanza del sen-sore alla draglia di prote-zione dei timoni ad X del sommergibile (evidenzia-ta in blu). In particolare le prime fasi di rilascio, rap-presentate dalla fuoriusci-ta della rope fuoriusci-tail e dei primi metri del sensore, risultano particolarmente critiche, perché l’array deve prendere il percorso corretto, posizionandosi sotto la draglia di protezione. Un errore di posizionamento dell’array in questa fase risulta particolarmente critico, in quanto collocandosi inavvertitamente sopra la draglia di prote-zione, si instaurerebbe il potenziale rischio di essere risucchiato dall’elica di propulsione, con gravi conseguenze per il sistema.
fig. 4.1 – Schermata di visualizzazione del winch, della guide whe-el, della fuoriuscita della cortina e della finestra di registrazione dei dati di forza
Le cause per cui il sensore potrebbe prendere il percorso errato comprendono eventuali brusche manovre in fase di rilascio dei primi metri di sensore, oppure particolari condizioni ambientali, come i moti turbolenti della superficie del mare.
Questo tipo di analisi non ha determinato l’individuazione di particolari limitazioni nell’impiego della cortina, ma semplicemente delle raccomandazioni sulla navigazione dell’unità trainante durante il rilascio dell’array. Più precisamente, risulta poco consigliabi-le effettuare brusche manovre durante il rilascio. È invece importante che la fase di rilascio avvenga ad una profondità tale che non faccia rientrare unità trainante o cortina trainata all’interno della zona d’onda. Nella zona d’onda, infatti, i moti turbolenti delle acque su-perficiali potrebbero causare il rilascio del sensore secondo un percorso errato.
Tali due raccomandazioni sono state tenute presenti per lo studio della procedura di mi-sura di rumore irradiato. È stato subito chiaro, che la fase di rilascio sarebbe dovuta essere una fase completamente distinta dalla fase di misura di rumore irradiato vera e propria.
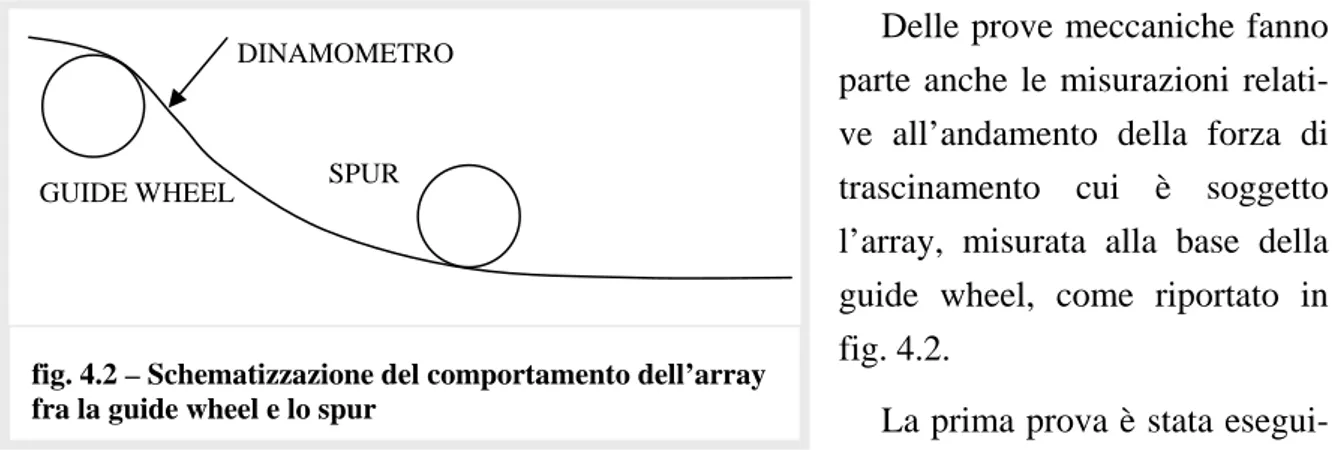
Delle prove meccaniche fanno parte anche le misurazioni relati-ve all’andamento della forza di trascinamento cui è soggetto l’array, misurata alla base della guide wheel, come riportato in fig. 4.2.
La prima prova è stata esegui-ta facendo assumere all’unità trainante varie profondità, lasciando inalteraesegui-ta la lunghezza svolta della cortina, con la sola rope tail rilasciata (lunghezza di circa 6 m). Lo scopo era di verificare che la misura del sensore di forza fosse indipendente dalle variazioni della pres-sione idrostatica.
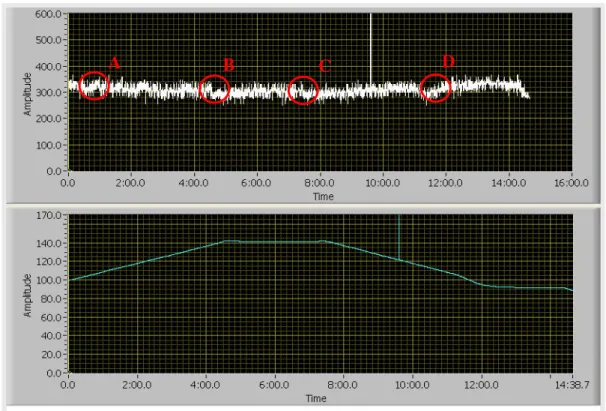
Dal grafico di fig. 4.3 si osserva la sostanziale indipendenza del dato di forza misurato sul sensore dalla pressione idrostatica, il che porta a concludere che la misura di forza è as-soluta.
Da un’osservazione più accurata della figura sono individuabili 4 lievi variazioni della forza esercitata dall’array sulla guide wheel, in corrispondenza di altrettanti cambiamenti di profondità o assetto. Con il solo scopo dell’analisi scientifica, questo andamento è stato studiato, giungendo alla conclusione che sia determinato dal fatto che ai cambiamenti di assetto dell’unità trainante corrisponde un’attitudine della rope tail ad “arrotolarsi” o “sro-tolarsi” dalla puleggia con cui termina il retractable spur, attitudine confermata da un’analisi geometrica e dalle immagini fornite dalla telecamera montata sul retractable spur.
fig. 4.2 – Schematizzazione del comportamento dell’array fra la guide wheel e lo spur
DINAMOMETRO
Quando l’unità trainante effettua un cambiamento di profondità verso quote maggiori od un cambiamento di assetto per il mantenimento della profondità raggiunta durante una risa-lita, l’array, che tende a mantenere la propria posizione per inerzia, si “arrotola” legger-mente alla puleggia dello spur (fig. 4.4, linea blu), causando una maggiore resistenza alla trazione, che si traduce in un aumento della forza sulla guide wheel. Allo stesso modo, quando l’unità trainante effettua un cambiamento di profondità verso quote minori o un cam-biamento di assetto per il man-tenimento della profondità rag-giunta durante una discesa, l’array si “srotola” leggermente dalla puleggia dello spur (fig. 4.4, linea rossa), causando una minore resistenza alla trazione, ovvero una diminuzione di forza sulla guide wheel.
Tale comportamento, ben visibile nella prova condotta, scompare quando è rilasciato l’intero sensore, per il fatto che in quel caso la forza di traino è molto superiore a quella causata dalla sola rope tail ed il fenomeno descritto non è più apprezzabile.
fig. 4.3 – Andamento della forza esercitata sulla guide wheel in funzione dei cambiamenti di profondità
A B C D
fig. 4.4 – Risposta dell’array ai cambiamenti di profondità
DINAMOMETRO
Una ulteriore prova ha riguardato il comportamento dei motori che agiscono nel funzio-namento del sistema di rilascio, in funzione della forza di trascifunzio-namento esercitata sulla guide wheel.
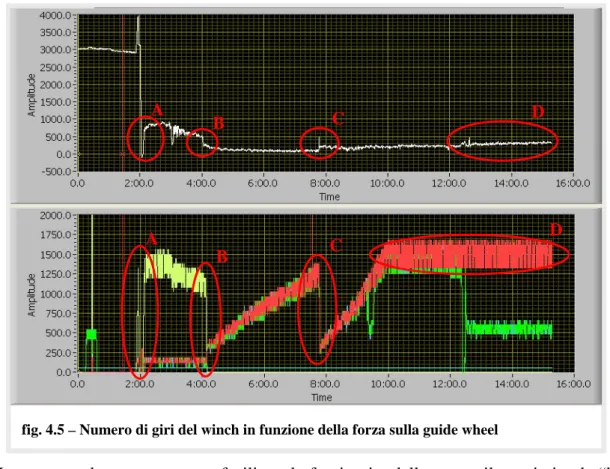
Il grafico di fig. 4.5 mostra l’andamento di tale forza, in relazione al funzionamento dei motori che muovono il winch (fig. 4.5, rosso), la guide wheel (fig. 4.5, verde) e della pom-pa ad acqua dello scouring device (fig. 4.5, giallo).
La pompa ad acqua serve per facilitare la fuoriuscita della rope tail, costituita da “bic-chieri” che funzionano come paracadute, consentendo all’acqua di entrare al loro interno ed esercitare una forza sufficiente a consentire la fuoriuscita dell’array.
All’azionarsi della pompa ad acqua, la forza esercitata sulla guide wheel aumenta im-provvisamente (fig. 4.5 – A) e subisce un brusca diminuzione quando la pompa si disattiva (fig. 4.5 – B). Dal momento del disattivarsi della pompa, la fuoriuscita dell’antenna è rego-lata da un equilibrio di forze: la forza di trazione tende a crescere man mano che l’array viene rilasciato, a causa dell’aumento di superficie esposta al contatto con l’acqua. La ten-denza all’aumento di tale forza è bilanciata da un aumento della velocità di fuoriuscita dell’antenna, ovvero da una accelerazione – misurata attraverso l’aumento del numero di giri del winch – pertanto la forza esercitata sulla guide wheel rimane pressoché costante.
La diminuzione della forza di traino fra i punti B e C è causata dal decremento di velo-cità relativa fra l’array e l’acqua, dovuta al fatto che, mentre la velovelo-cità di traino rimane
fig. 4.5 – Numero di giri del winch in funzione della forza sulla guide wheel
A
B C D
A
B C
trainante – sta aumentando. La velocità di rotazione del winch è subordinata ad una livello soglia minimo di forza sulla guide wheel. Se tale livello non è raggiunto, il winch rallenta o si ferma e riparte solo quando viene superato il livello soglia (fig. 4.5 – C). Più precisa-mente tale soglia evita che il winch continui a rilasciare la cortina in assenza di forza di trazione, poiché potrebbero allentarsi una o più spire avvolte sul tamburo del winch e tra loro sovrapporsi o addirittura accatastarsi in possibili protuberanze presenti nella zona del winch.
Proseguendo con l’analisi della fig. 4.5, si nota come fintanto che la velocità di rotazio-ne del winch aumenta, l’acceleraziorotazio-ne rotazio-nella fuoriuscita dell’array è in grado di bilanciare l’aumento di forza di trazione e la forza totale rimane costante. Quando però il winch as-sume una velocità di rotazione costante, perchè è stata raggiunta la massima velocità di ro-tazione, si nota un aumento della forza di trazione (fig. 4.5 – D). In quest’ultimo caso infat-ti l’aumento di forza di trazione causato dall’aumento di superficie esposta, non è più bi-lanciato dalla forza prodotta dall’accelerazione nella fuoriuscita e quindi la forza sulla gui-de wheel ha un andamento in ascesa.
Quanto detto consente di concludere che esiste una velocità minima di traino per il rila-scio del sensore. Tale limitazione è determinata dalla necessità di una adeguata forza di traino, che consenta al winch un comportamento più costante possibile (continui mancati raggiungimenti della soglia minima della forza di trazione, causerebbero ripetuti “stop” del winch, con la possibile conseguenza dell’allentamento di più spire sul rullo). Ovviamente, avendo stabilito di distinguere le due fasi di rilascio e di effettuazione delle prove di rumo-re irradiato, la velocità da tenerumo-re in fase di rilascio non incide sulla velocità da tenerumo-re du-rante le prove di rumore irradiato.
Il funzionamento del meccanismo di rilascio secondo il superamento di un livello soglia di forza, consente di spiegare la tendenza alla diminuzione del tempo di rilascio con l’aumentare della velocità di traino, osservato durante le prove. Questo accade perché, all’aumentare della velocità di traino aumenta la forza di traino e ciò consente un più facile superamento della soglia richiesta per la movimentazione del winch, che raggiunge così il numero massimo di giri al minuto in tempi più brevi.
Infine si riporta in appendice 1, a pag. A-2 l’andamento della forza di traino in funzione della velocità. In particolare nella parte superiore di pag. A-2 è riportato un modello elabo-rato al computer relativo all’andamento della forza di traino in funzione della velocità di traino e della lunghezza di sensore rilasciata. Nella parte inferiore di pag. A-2 sono stati invece riportati i dati misurati relativi ad una accelerazione (linea blu) seguita da una dece-lerazione (linea rossa) dell’unità trainante, quando tutti i 400 m di array si trovavano in ac-qua.
Per interesse scientifico, è da notare come in fase di decelerazione sia ben individuabile una zona nella quale c’è una caduta della forza di traino, seguita da un andamento più line-are. Non appena inizia la decelerazione, infatti, si ha una brusca diminuzione della tensione sull’array dovuta al suo moto di inerzia: l’array tenderebbe a perseverare nel suo moto alla massima velocità raggiunta, quando l’unità trainante decelera, ma incontra un ostacolo, un vincolo rappresentato dall’unità stessa e parte della forza di traino viene quindi scaricata su questo vincolo, fin quando non si ripristina una situazione di equilibrio, che si caratterizza con un decremento lineare della forza di traino.
Ai fini delle prove condotte, il dato più importante che si evince dal confronto del mo-dello con i dati sperimentali dell’andamento della forza in funzione della velocità di traino, è che i risultati ottenuti in pratica sono molto vicini ai valori ipotizzati nel modello. Questo consente un monitoraggio del sensore durante l’effettuazione delle prove di rumore irradia-to: qualora la forza di traino sul sensore (indicata dal sistema sonar di bordo) crescesse in modo incontrollato, tale da discostarsi dai dati del modello, sarebbe il sintomo che il senso-re senso-remoto, della considesenso-revole lunghezza di 400 m, è rimasto impigliato in eventuali osta-coli marini. Questo determinerebbe l’immediata interruzione delle prove e risoluzione del-la situazione di potenziale pericolo per il danneggiamento del sensore e dell’unità trainan-te. In fase di pianificazione delle prove questa eventualità è stata presa in esame, in partico-lare per le prove di rumore irradiato, data l’esigua distanza fra sensore e nave campione. Proprio per scongiurare l’eventualità di danneggiamento del sensore, si è pianificata la na-vigazione di unità navale campione e sommergibile interponendo un battente d’acqua di 60 m. Inoltre, ai fini della sicura effettuazione delle prove di rumore irradiato, queste devono essere effettuate in aree caratterizzate da una scarsa densità di traffico.
4.2. Prove idrodinamiche
Delle cortine idrofoniche trainate si può dire che siano ricevitori sonar meccanicamente “flessibili”. Proprio tale caratteristica consente l’impiego pratico di questi dispositivi, che possono essere così raccolti per essere stivati: se si trattasse di sistemi rigidi, la stessa ele-vata lunghezza geometrica ed acustica che costituisce il grande vantaggio del loro impiego, ne impedirebbe l’utilizzo.
D’altro canto, è necessario che, durante la ricezione di segnali acustici, la cortina idrfonica sia rigidamente distesa, occupando una posizione nota nello spazio sia sul piano o-rizzontale sia su quello verticale, quanto più possibile oo-rizzontale rispetto alla superficie del mare. Solo in questo modo, infatti, il diagramma di irradiazione dell’antenna avrà la geometria definita in fase di progetto e i fasci preformati avranno direttività massima, così da ottenere un’informazione corretta.
Quanto detto chiarisce che si crea un problema legato alla geometria dell’antenna in ac-qua. È stato chiarito rispettivamente nei paragrafi 2.2 e 3.1 che il towed array è costruito in modo da avere un assetto il più possibile neutro in acqua di mare e che l’effettivo posizio-namento nello spazio è fornito da 2 profondimetri disposti lungo l’array che consentono di comprendere la disposizione dell’antenna sul piano verticale e da 4 bussole che forniscono informazioni sulla disposizione dell’antenna sul piano orizzontale.
La situazione ideale sarebbe che si potesse rilevare la stessa profondità e lo stesso orien-tamento su tutti i sensori: questo significherebbe che l’array è perfettamente teso, non è soggetto ad ampie vibrazioni in nessuna delle su parti ed è parallelo alla superficie del ma-re. Se l’array fosse ben compensato dal punto di vista idrodinamico, il raggiungimento del-la condizione ideale sarebbe funzione deldel-la velocità di traino. Risulta chiaro che, comun-que, la regolare disposizione del sensore è subordinata al fatto che l’unità trainante proceda in modo rettilineo.
Allo scopo di verificare il corretto comportamento idrodinamico dell’antenna, sono state effettuate delle prove, delle quali alcuni risultati sono riportati in appendice 1.
Dall’analisi dei risultati riportati a pag. A-3 e nella parte superiore di pag. A-4 si nota come una delle quattro bussole (linea gialla) è affetta da un bias di circa 10 gradi rispetto alle altre e risulta particolarmente disallineata. Il corretto comportamento delle altre tre bussole ed ulteriori prove effettuate hanno portato a concludere che escludendo la bussola disallineata, è possibile lo stesso ottenere un dato di rilevamento sufficientemente accurato.
Inoltre dal primo grafico di pag. A-3 si nota che, per una velocità di traino inferiore ai 2,5 nodi è presente una oscillazione del dato fornito dalla bussola #4 (linea nera), che indi-ca un comportamento idrodinamico non corretto al di sotto di tale velocità.
Dal confronto dei grafici di pag. A-3 con il grafico nella parte superiore di pag. A-4, re-lativi alla percorrenza di tratte con rotte opposte, è possibile comprendere la ragione della differenza fra il rilevamento delle tre bussole all’interno del towed array e la bussola di bordo. Si tratta dell’effetto di una corrente marina presente nella zona delle prove, che ha causato lo scostamento dell’array rispetto alla direzione dell’unità trainante. I due grafici in argomento mostrano come con il cambiamento di rotta, lo scostamento del dato indicato dalle bussole del sensore passi da negativo a positivo, dimostrando come segua l’andamento della corrente.
L’influenza della corrente sul posizionamento del sensore sul piano orizzontale è fun-zione sia dell’intensità della corrente stessa, che della velocità di traino. Quest’ultima tut-tavia non potrà mai essere elevata a piacere, anche per il fatto che, come ci si aspetta e ver-rà confermato dai dati del paragrafo seguente, il flow noise tende a crescere all’aumentare della velocità.
Oltre alle prove puramente idrodinamiche, evidenza del corretto allineamento dell’antenna sul piano orizzontale l’hanno fornito le prove di bearing accuracy, che hanno mostrato una accuratezza nella misura di rilevamento inferiore a 1°, per eccessi di segnale superiori a 12 dB e per una velocità di traino variabile fra 3 e 6 nodi.
Bisogna infine sottolineare come l’allineamento fra unità trainante e sensore è auspica-bile ai fini del controllo della cinematica del proprio sensore remoto, ma non necessario ai fini acustici.
Il comportamento dell’antenna sul piano verticale è riportato nel grafico nella parte in-feriore di pag. A-4. In questo grafico i valori indicati sull’asse delle ordinate non sono pro-fondità assolute, ma relative alla propro-fondità dell’unità trainante, assunta come riferimento. Il punto (0,0) rappresenta il punto di fuoriuscita del sensore dall’unità trainante. Prose-guendo da destra verso sinistra è rappresentato il cavo di traino, quindi il primo sensore di profondità, la cortina idrofonica ed il secondo sensore di profondità.
Dall’analisi dei risultati riportati nel grafico in questione, risulta che la pesantezza del cavo di traino causa un maggiore affondamento della parte anteriore della cortina idrofoni-ca rispetto alla profondità del mezzo trainante. La quota della parte posteriore della cortina dipende invece dalla sua pesantezza in acqua. Nel caso preso in esame, è evidente come la cortina risulti leggera in acqua, il che causa il fatto che la parte posteriore dell’antenna si trovi a profondità inferiore rispetto alla parte anteriore. Tale effetto tende a ridursi con l’aumentare della velocità e comunque l’impianto possiede la capacità di compensare la posizione sul piano verticale attraverso una tecnica basata sulla variazione della velocità del suono.
Dai risultati ottenuti dalle prove idrodinamiche, si è potuto identificare un limite inferio-re della velocità di effettuazione delle prove di rumoinferio-re irradiato. Il limite individuato è 3 nodi.
Il limite superiore verrà individuato attraverso l’analisi dei risultati delle prove di flow-noise.
4.3. Flow Noise
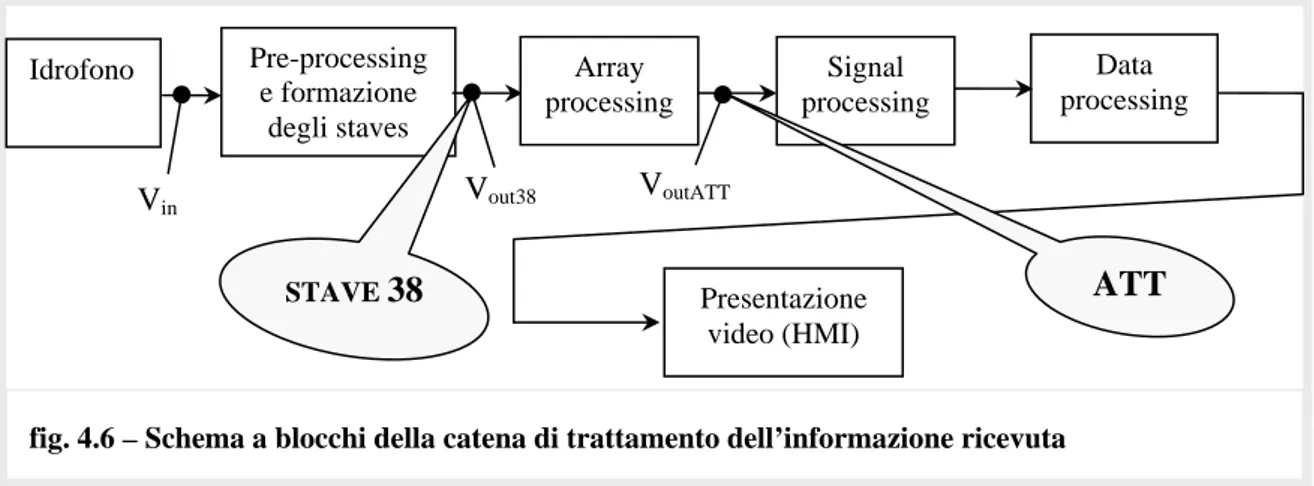
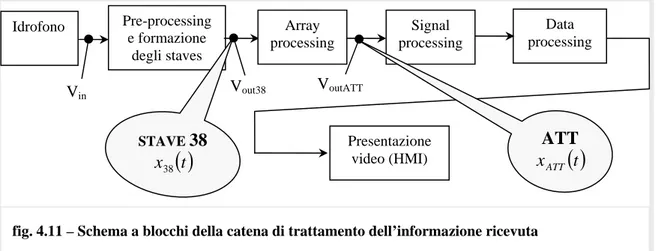
Le prove di flow noise sono state effettuate in ambiente estremamente silenzioso. Per questa prova, come per tutte le prove che hanno previsto la registrazione di dati acu-stici, è stata effettuata la registrazione del segnale ricevuto dal Towed Array System, preso in due punti differenti della catena di processazione del segnale, come illustrato in fig. 4.6:
all’uscita di una particolare stecca, presa al centro dell’array (segnale denominato stave 38);
all’uscita del blocco di array processing, ove viene registrato il segnale audio relati-vo ad un fascio. Tale segnale viene individuato a partire dalla traccia assegnata nella presentazione video tramite la funzione ATT – Automatic Target Tracking (segnale denominato ATT).
Il sistema sonar di bordo fornisce la possibilità di costruire una falsa traccia, ovvero l’inseguimento, attraverso la funzione ATT, di un bersaglio non realmente esistente, ma impostato manualmente. Per la prova di flow noise, è stata costruita una falsa traccia a poppa dell’array, quindi sul lobo endfire dell’antenna. Si è infatti considerato che l’utilizzo del lobo endfire sarebbe stato auspicabile per la conduzione della prova di rumore irradia-to, in quanto è l’unico lobo di direttività a non essere soggetto al fenomeno del lobo imma-gine.
Per ciascuna prova sono stati registrati 20 files (10 ATT e 10 stave 38), due (1 ATT e 1 stave 38) per ogni assetto: 2 kts, 2 kts con navigazione silenziosa, 3 kts, 4 kts, 6 kts, 8 kts, 10 kts, 12 kts, 14 kts, 16 kts, con un tempo di registrazione di 1 minuto per ciascuna velo-cità.
Vista la presenza degli amplificatori a guadagno variabile, per questa prova come per la prova di rumore irradiato, ognuno dei files è caratterizzato da un proprio guadagno di po-tenza GT. Il valore di guadagno GT è costantemente monitorato dal sistema sonar ed
indi-Pre-processing e formazione degli staves Array processing Signal processing Presentazione video (HMI) Idrofono
fig. 4.6 – Schema a blocchi della catena di trattamento dell’informazione ricevuta
Data processing
STAVE 38 ATT
ca il rapporto fra la tensione di uscita e la tensione di ingresso per ogni minuto di registra-zione: 2 38 38 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = in out V V GT 2 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = in outATT ATT V V GT
Nella presente trattazione, il livello di segnale non verrà riportato in acqua, quindi sarà sempre espresso in Volt. Questo perché non si conosce l’esatto criterio della composizione dei singoli staves nella formazione del fasci.
Per questa prova, il risultato atteso era un’energia monotonamente crescente con l’aumentare della velocità, per entrambe le profondità. Ci si aspettava inoltre che i valori relativi alla profondità di 120 m sarebbero risultati simili o al più inferiori a quelli relativi alla profondità di 60 m.
Mentre per il dato stave 38 i risultati (riportati in appendice 1, nella parte superiore di pag. A-5) hanno confermato tale ipotesi, per il dato ATT (parte inferiore di pag. A-5), l’andamento risulta irregolare e non è spiegabile con i meccanismi di formazione del flow noise, il fatto che l’antenna risulti più rumorosa a profondità 120 m.
È stato possibile dare un’interpretazione di questo fenomeno attraverso l’analisi dei dati della navigazione effettuata durante le misure di flow noise. Infatti, per chiari motivi ri-guardanti il tempo di effettuazione delle due prove di flow noise (una a profondità 60 m e l’altra a profondità 120 m), non è stata seguita la stessa rotta per entrambe: per la prima prova (profondità 120 m) la navigazione è avvenuta verso Ovest, quindi allontanandosi dalla costa; per la seconda prova (profondità 60 m) la navigazione è avvenuta verso Est, quindi verso la costa.
Si è quindi concluso che, durante l’effettuazione della prova a 120 m, il livello di flow noise fosse più elevato a causa del fatto che il lobo endfire dell’antenna puntasse verso la costa, quindi ricevesse il rumore del traffico all’ingresso del porto di Alghero, che invece, a causa del cambiamento di rotta, non è stato ricevuto durante la prova a 60 m.
Individuata la causa del problema, si è deciso di non ritenere attendibile il segnale ATT relativo alle prove di flow noise, in quanto i segnali relativi alle due diverse rotte, presi do-po il beamformer, non sono confrontabili. Risulta invece corretto il risultato ottenuto me-diante la registrazione del segnale stave 38, dal momento che si tratta di un segnale che non è influenzato dalla particolare posizione del sensore, in quanto la singola stecca non presenta lobi di direttività.
L’energia di segnale per ciascuna prova è stata calcolata a partire dalla formula dell’energia per segnali discreti, essendo il segnale della registrazione un segnale campio-nato con frequenza di campionamento 7808 Hz:
( )
∑
+∞ −∞ = = i out i V V i E out 2 ) (ove il segnale Vout(i) rappresenta la tensione di uscita del segnale ricevuto.
Limitando l’osservazione del segnale Vout(i) all’intervallo finito [0;N][9, pag. 10], si ot-tiene V
( )
i T out :( )
( )
⎩ ⎨ ⎧ ≤ ≤ = altrove 0 0 i N i V i VoutT outavendo indicato con N il numero di campioni nell’intervallo di tempo di interesse, calcola-to come:
N = intervallo di tempo di interesse [sec] * frequenza di campionamento Volendo infine riferire tutto alla tensione di ingresso:
( )
∑
( )
∑
( )
∑
+∞ −∞ = ∞ + −∞ = ∞ + −∞ = ⋅ = ⋅ = ⋅ = i out i out out in i out in out t V V i GT i V V V V V i V E T T T in 2 38 2 2 2 2 2 2 ) ( 1 38 38Passando all’espressione logaritmica si ottiene il valore in dB//V rappresentato nelle fi-gure a pag. A-5:
( )
10(
38)
2 10 ) ( 10 Log V i 10 Log GT E i out t Vin ⎟− ⋅ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ =∑
+∞ −∞ =Osservando i dati riportati nella figura superiore di pag. A-5, si nota come esiste un in-tervallo di velocità nel quale il livello di flow noise rimane pressoché costante: sono le ve-locità da 2 a 6 nodi, che producono una variazione di flow noise massima di meno di 1,5 dB.
In questo intervallo di velocità, la potenza di rumore proprio del sensore è inferiore alla potenza di rumore ambientale, ragione per la quale è pressoché invariante con la velocità.
I risultati ottenuti dall’analisi dei dati di flow noise sono utili per la determinazione del limite superiore di velocità per l’effettuazione delle prove di rumore irradiato. Infatti per tali prove ci si vuole mantenere a velocità che non comportino una potenza di rumore supe-riore a quella imposta dal rumore ambientale. Il limite supesupe-riore individuato da questa pro-va è 6 nodi.
Quanto detto spiega perché, come detto nel paragrafo 3.4, le prove di rumore irradiato sono state pianificate una con una velocità assoluta del sommergibile pari a 3 nodi (rotte di controbordo) e l’altra con una velocità assoluta del sommergibile pari d 4 nodi (rotte sullo stesso bordo).
Infine si nota come l’esperimento riguardante la misura del livello di flow noise in fun-zione della profondità abbia dato un risultato che sembra confermare l’ipotesi di diminu-zione del flow noise di questo tipo di sensore all’aumentare della profondità. Infatti si nota che, a partire dalla velocità (8 nodi) alla quale il flow noise sovrasta il rumore ambientale, cominciando a crescere, l’energia di flow noise relativa alle prove a 120 m è inferiore di circa 2 dB//V rispetto all’energia di flow noise relativa alle prove a 60 m.
La spiegazione di questa tendenza potrebbe essere legata al fenomeno del distacco dei filetti fluidi adiacenti ad un corpo solido che si muove di moto rettilineo uniforme in un mezzo fluido. In particolare, nel caso della cortina, la tendenza al distacco dei filetti fluidi attorno alla superficie esterna potrebbe essere ostacolato dalla profondità.
La comprensione delle leggi che regolano l’andamento del flow noise in funzione della profondità richiede comunque uno studio più approfondito effettuato ripetendo l’esperimento più volte, studio che esula dagli scopi del presente lavoro e del quale si vuol comunque sottolineare l’interesse per ulteriori studi futuri. Nel caso in cui si dovesse con-fermare la diminuzione del flow noise al crescere della profondità di traino, si potrebbe concludere che operare a profondità maggiori migliora le prestazioni acustiche del sensore.
Le prove idrodinamiche e le prove di flow noise hanno consentito di porre dei limiti di velocità per la pianificazione delle misure di rumore irradiato. Solo a questo punto è stato possibile confermare la pianificazione delle prove di rumore irradiato e la procedura di mi-sura riportate nel paragrafo 3.4 e quindi eseguire l’esperimento oggetto di questo lavoro di tesi.
Inoltre le prove di flow noise hanno evidenziato come l’utilizzo del lobo endfire sia in generale troppo vincolato al posizionamento geografico delle rotte di nave campione ed u-nità trainante, mentre l’impiego degli altri lobi di direttività consente una maggiore flessi-bilità. Ciò ha portato a escludere una procedura di misura del rumore irradiato attraverso il lobo endfire, preferendo scenari in cui vengono utilizzati tutti i fasci, poiché si è preferito non complicare la prova vincolandola alla configurazione geografica del luogo delle misu-re.
4.4. Analisi dei dati di navigazione e ricostruzione delle cinematiche
All’interno delle prove di rumore irradiato, particolare importanza assume l’evoluzione della geometria del sistema costituito dall’insieme di sommergibile, cortina idrofonica e nave. Nel paragrafo 3.4, infatti, è stato chiarito come tale aspetto delle prove sia stato pia-nificato, tuttavia la mutevolezza delle condizioni ambientali quali stato del mare, venti e correnti, potrebbe causare la modifica degli schemi prestabiliti. Inoltre, anche in presenza di condizioni atmosferiche ottimali, in sede di pianificazione non è sempre pensabile di a-vere a che fare con un’unità che possa rispettare con le precisioni richieste (si è fissato l’errore massimo al 5%) le rotte e le velocità consigliate per l’effettuazione della prova.
Considerato che la semplicità e la rapidità di esecuzione sono state assunte comunque come caratteristica essenziale della procedura di misura di rumore irradiato proposta, si è pensato di considerare la cinematica pianificata come indicativa e di ricostruire a posteriori la reale cinematica dei mezzi coinvolti nella prova. A questo scopo è stato richiesto alla nave campione di prendere i punti GPS con cadenza di un minuto dall’inizio della prova ed al sommergibile di prendere i propri punti GPS ogni minuto fino al momento dell’immersione, ed i punti forniti dal navigatore inerziale con la stessa cadenza dopo l’immersione.
La necessaria precisione dei punti GPS per la ricostruzione a posteriori della cinematica è garantita dallo stesso sistema di posizionamento satellitare (la precisione del dato GPS è di 15-20 m da quando il 01/05/2000 è stata disabilitata la funzione di degradazione del se-gnale [22]). Rimane da dimostrare la precisione dei punti tracciati secondo i dati forniti dal navigatore inerziale del sommergibile.
Per tale dimostrazione è stato necessario per prima cosa tracciare su carta l’evoluzione della geometria del sistema sommergibile-nave nel tempo a partire dalla conoscenza del punti geografici in latitudine e longitudine. Quindi si è presa in considerazione l’evoluzione temporale della posizione del solo sommergibile dal momento dell’immersione al momento della riemersione. È stata tracciata sia la rotta individuata dal-la congiunzione dell’ultimo punto GPS prima dell’immersione con il primo punto GPS do-po la riemersione, sia la rotta individuata dalle coordinate fornite dal navigatore inerziale, con lo scopo di verificare la trascurabilità di un eventuale errore o deriva del sistema iner-ziale.
La trattazione che segue spiega il metodo usato per la visualizzazione della sequenza di posizioni della nave campione e del sommergibile. Successivamente si dimostra che per le piccole tratte percorse, l’errore che si commette usando i dati inerziali è trascurabile, ren-dendo possibile l’effettuazione della prova alla profondità di prova di 60 metri, pur mante-nendo una estrema precisione della ricostruzione delle geometrie a posteriori.
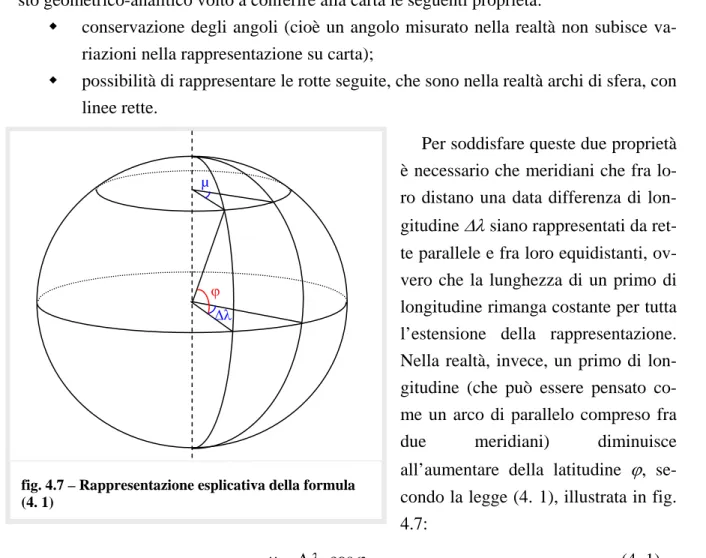
Per lo studio e la rappresentazione delle cinematiche del sommergibile e della nave campione si è scelto di utilizzare, a similitudine di quanto si fa con le carte Nautiche, il si-stema di rappresentazione detto di Mercatore. Questo sisi-stema utilizza un procedimento mi-sto geometrico-analitico volto a conferire alla carta le seguenti proprietà:
conservazione degli angoli (cioè un angolo misurato nella realtà non subisce va-riazioni nella rappresentazione su carta);
possibilità di rappresentare le rotte seguite, che sono nella realtà archi di sfera, con linee rette.
Per soddisfare queste due proprietà è necessario che meridiani che fra lo-ro distano una data differenza di lon-gitudine Δλ siano rappresentati da ret-te parallele e fra loro equidistanti, ov-vero che la lunghezza di un primo di longitudine rimanga costante per tutta l’estensione della rappresentazione. Nella realtà, invece, un primo di lon-gitudine (che può essere pensato co-me un arco di parallelo compreso fra due meridiani) diminuisce all’aumentare della latitudine ϕ, se-condo la legge (4. 1), illustrata in fig. 4.7:
ϕ λ
μ =Δ ⋅cos (4. 1) dove µ è il valore che un angolo Δλ misurato sull’equatore assume a latitudine ϕ.
Affinché Δλ possa rimanere costante per ogni latitudine, secondo la (4. 1), nella rappre-sentazione su carta sarà necessario operare una dilatazione della latitudine, secondo la se-guente legge: ϕ ϕ cos 1 = M (4. 2)
nella quale ϕM viene detta latitudine di Mercatore e ϕ è la latitudine reale.
In accordo con la (4. 2) un primo di latitudine sulla carta sarà tanto maggiore quanto più elevata è la latitudine, tendendo ad infinito ai poli.
Per quanto detto finora, la lunghezza di un arco di meridiano sulla rappresentazione di Mercatore è data dall’espressione:
Δλ
ϕ
µ
fig. 4.7 – Rappresentazione esplicativa della formula (4. 1)
C u ϕ
ϕ = ⋅ Δ
dove u è il modulo della carta, cioè la lunghezza in millimetri che nella rappresentazione di Mercatore corrisponde ad un primo di longitudine e ϕC è detta latitudine crescente, ot-tenuta dal seguente integrale:
∫
= ϕ ϕ ϕ ϕ 0cos 1 d Cil cui valore, espresso in primi di arco e considerando la terra avente forma ellissoidale, può essere ottenuto dalla seguente formula empirica:
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⋅ + ⋅ − ⋅ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ °+ ⋅ = 10 2 sin 1 sin 1 2 45 tan log 705 . 7515 e C e e ϕ ϕ ϕ ϕ
Una volta chiari gli elementi teorici che sono alla base della rappresentazione, si è pro-ceduto secondo i passi di seguito riportati.
Per prima cosa si sono stabiliti i limiti della carta (ϕmin; ϕmax; λmin; λmax) e si è calcolata la latitudine media 2 min max ϕ ϕ ϕm = +
Dalle tavole nautiche [15, tavola 5] è stata ricavata, la lunghezza in metri di un primo di longitudine alla latitudine ϕm (U), valore che ha consentito di scegliere la scala di rappre-sentazione ritenuta adeguata:
10000 : 1 =
S
Nota la scala ed il valore U, è stato possibile calcolare il modulo della carta:
S U u= ⋅
Successivamente, dalle tavole nautiche (tavola 4) sono stati estrapolati i valori (in primi) della latitudini crescenti di interesse, compresi quelli relativi ai limiti della carta (ϕmin; ϕmax). Tali valori sono stati poi interpolati per ottenere la latitudine crescente esatta per cia-scun valore di latitudine dei punti GPS ed inerziali di nave e sommergibile. Quindi si sono trasformate le coordinate nave e sommergibile da gradi e decimillesimi di grado in primi e millesimi di primo.
Calcolando poi punto per punto il valore ϕ ϕminM −
e moltiplicando quest’ultimo ed i rispettivi valori di λ per il modulo della carta u, si è ef-fettuato un cambiamento di sistema di riferimento, che ha consentito di ottenere le coordi-nate (rispettivamente y ed x), riferendo tutti i punti (in millimetri) al punto di coordicoordi-nate (ϕminM ⋅u;λmin ⋅u).
Una volta trovate tutte le coordinate (x,y) dei punti da rappresentare, è stato costruito il grigliato, calcolando la distanza fra i paralleli con lo stesso metodo utilizzato per il calcolo delle y e la distanza fra i meridiani con lo stesso metodo usato per il calcolo delle x. Per en-trambe le coordinate è stato scelto di considerare come distanza fra i meridiani ed i paralle-li mezzo primo di grado.
Attraverso questo procedimento è stato possibile trasformare le coordinate (ϕ,λ) in co-ordinate (x,y) facilmente rappresentabili. Sono stati rispettati i metodi di costruzione di una comune carta nautica, il che consente di vedere rappresentato lo spostamento reale (soprat-tutto in angolo) che hanno effettuato le due piattaforme. La sovrapposizione alla rappresen-tazione di un reticolo geografico, realizzato secondo il metodo detto di Mercatore consente di collocare nello spazio la nave ed il sommergibile.
Il risultato ottenuto è la cinematica assoluta della prova, ovvero la rappresentazione su un piano del susseguirsi delle coordinate GPS ed inerziali. Le rappresentazioni della prima e della seconda corsa sono riportate, rispettivamente, in appendice 1 a pagg. A-6 e A-8, nei grafici nella parte superiore delle pagine.
I grafici nelle parti inferiori delle pagg. A-6 ed A-8, sono uno zoom delle posizioni del sommergibile (linea verde) sulla tratta che va dell’ultimo punto GPS prima dell’immersione al primo punto GPS dopo la riemersione. Per ciascuno dei due grafici, la linea nera congiunge i due punti GPS fra i quali sono compresi i punti inerziali. Questo consente di apprezzare come il percorso indicato dal navigatore inerziale sia perfettamente coerente con i punti GPS iniziale e finale della tratta: si può dire che la tratta stessa sia coe-rente dall’inizio alla fine, indipendentemente dalla natura dei punti tracciati sulla carta.
Con questo si è dimostrato che l’impiego del navigatore inerziale per la registrazione della posizione del sommergibile durante il breve periodo di tempo che comprende l’immersione, l’effettuazione della prova e la riemersione, non causa un errore nella preci-sione della ricostruzione delle geometrie a posteriori.
Quanto detto consente di concludere che l’effettuazione delle prove alla profondità pre-vista (60 m) non inficia la precisione della ricostruzione delle geometrie a posteriori, e, come chiarito alla fine del paragrafo 4.1, consente l’effettuazione in sicurezza della proce-dura.
as-zione nel tempo, dall’altro non consentono una immediata estrapolaas-zione dei dati di di-stanza e angolo necessari per l’analisi e l’interpretazione dei dati acustici. È stata quindi ef-fettuata un’analisi dei dati geografici allo scopo di trasformare le cinematiche assolute in cinematiche relative, riferite al cento acustico della cortina idrofonica, che risulta fisso e disposto secondo l’asse Nord-Sud.
Per ottenere le cinematiche relativa, sono state calcolate le distanze della nave dal som-mergibile per ogni istante nel quale si conoscevano i punti GPS od inerziali.
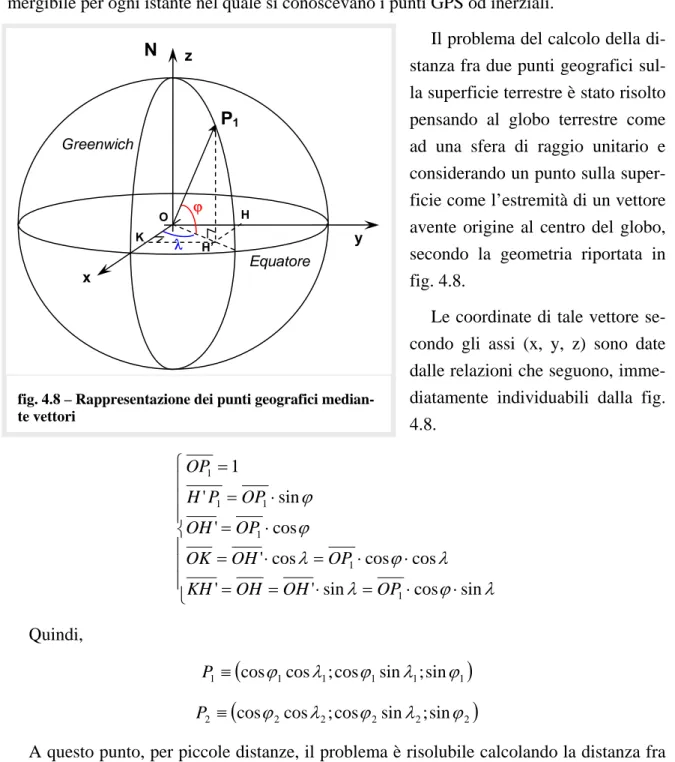
Il problema del calcolo della di-stanza fra due punti geografici sul-la superficie terrestre è stato risolto pensando al globo terrestre come ad una sfera di raggio unitario e considerando un punto sulla super-ficie come l’estremità di un vettore avente origine al centro del globo, secondo la geometria riportata in fig. 4.8.
Le coordinate di tale vettore se-condo gli assi (x, y, z) sono date dalle relazioni che seguono, imme-diatamente individuabili dalla fig. 4.8. ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎨ ⎧ ⋅ ⋅ = ⋅ = = ⋅ ⋅ = ⋅ = ⋅ = ⋅ = = λ ϕ λ λ ϕ λ ϕ ϕ sin cos sin ' ' cos cos cos ' cos ' sin ' 1 1 1 1 1 1 1 OP OH OH KH OP OH OK OP OH OP P H OP Quindi,
(
1 1 1 1 1)
1 ≡ cosϕ cosλ ;cosϕ sinλ;sinϕ
P
(
2 2 2 2 2)
2 ≡ cosϕ cosλ ;cosϕ sinλ ;sinϕ
P
A questo punto, per piccole distanze, il problema è risolubile calcolando la distanza fra due punti in un piano cartesiano tridimensionale.
(
) (
) (
)
2 2 1 2 2 2 1 1 2 2 2 1 1 21P ≡ cosϕ cosλ −cosϕ cosλ + cosϕ sinλ −cosϕ sinλ + sinϕ −sinϕ
P
fig. 4.8 – Rappresentazione dei punti geografici median-te vettori P1 K H O N Greenwich Equatore H’ x y z ϕ λ
2 1 2 2 1 2 2 2 1 1 2 2 2 2 1 2 1 2 2 2 1 1 2 2 2 2 1 2 1 2 2 1 sin sin 2 sin sin sin cos sin cos 2 sin cos sin cos cos cos cos cos 2 cos cos cos cos ϕ ϕ ϕ ϕ λ ϕ λ ϕ λ ϕ λ ϕ λ ϕ λ ϕ λ ϕ λ ϕ ⋅ − + + + ⋅ − + + + ⋅ − + ≡ P P
(
1 2)
1 2 2 1 21P ≡ 2−2⋅cosϕ cosϕ cosλ −λ −2⋅sinϕ sinϕ
P (4. 3)
ove P1P2 rappresenta, in raggi terrestri, la distanza tra i due punti. La distanza P1P2 in me-tri si ottiene moltiplicando la (4. 3) per il valore in meme-tri del raggio terrestre, 6,378155*106.
La (4. 3) è la formula che è stata utilizzata per il calcolo della distanza fra i punti geo-grafici in coordinate (ϕ, λ) relativi alle prove di rumore irradiato. È stato verificato che i risultati ottenuti, per le piccole distanze in esame, sono i medesimi (con una precisione di oltre 10-5 radianti) che si sarebbe ottenuto mediante l’applicazione della formula derivante dalla soluzione del problema generale, che si ottiene mediante la (4. 4).
(
)
2 1 2 1 2 1, cos OP OP OP OP OP OP ⋅ • = (4. 4) nella quale:(
1 1 1 1 1) (
2 2 2 2 2)
21• OP = cosϕ cosλ;cosϕ sinλ ;sinϕ • cosϕ cosλ ;cosϕ sinλ ;sinϕ
OP
(
1 2)
1 22 1 2
1• OP =cosϕ cosϕ cosλ −λ +sinϕ sinϕ
OP
E dalla quale si ottiene infine il valore in raggi terrestri:
(
)
[
1 2 1 2 1 2]
2
1P ≡arccoscosϕ cosϕ cosλ −λ +sinϕ sinϕ
P
Note le distanze per la costruzione della cinematica relativa, sono necessari anche i rile-vamenti, ovvero l’angolo formato fra la rotta del sommergibile e la congiungente centro sommergibile-centro nave, calcolato attraverso (4. 5) [16, pag. 145].
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ Δ Δ = ϕ ϕm λ β arctan cos (4. 5) ove con ϕm si è indicata la latitudine media.
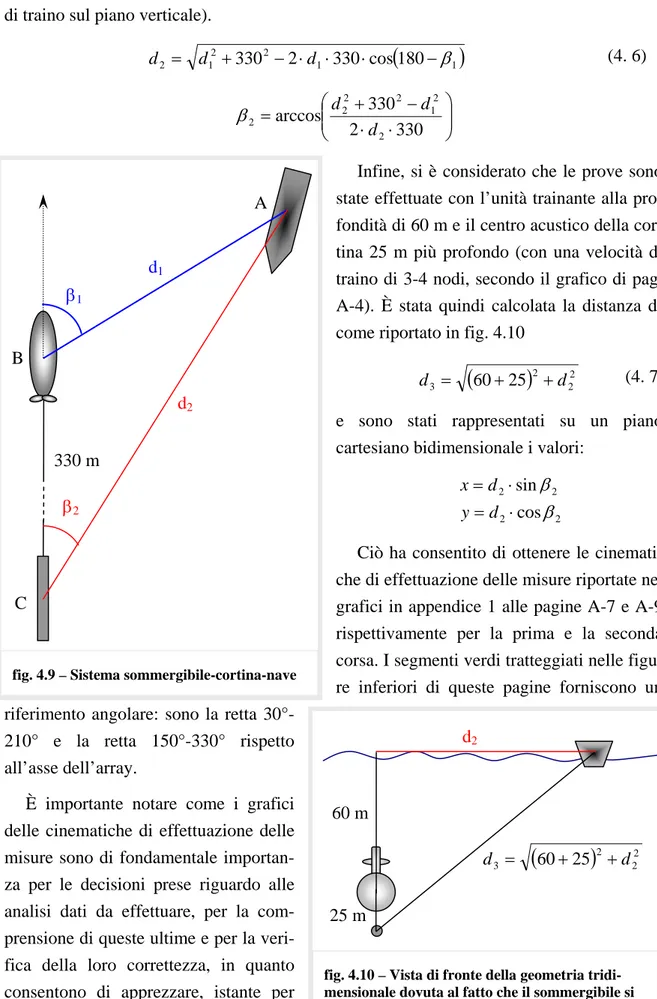
La (4. 3) e la (4. 5) hanno consentito di calcolare, minuto per minuto, la distanza ed il ri-levamento della nave, riferiti al centro dell’unità trainante, ove è presente il ricevitore GPS. Essendo nota la geometria del sistema sommergibile-cortina idrofonica, applicando il Teo-rema di Carnot al triangolo ABC di fig. 4.9, è stato possibile calcolare la distanza ed il rile-vamento1 della nave dal centro acustico della cortina idrofonica trainata, che dista circa
330 metri dal centro dell’unità trainante (misura già compensata dell’inclinazione del cavo di traino sul piano verticale).
(
1)
1 2 2 1 2 = d +330 −2⋅d ⋅330⋅cos180−β d (4. 6) ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⋅ ⋅ − + = 330 2 330 arccos 2 2 1 2 2 2 2 d d d βInfine, si è considerato che le prove sono state effettuate con l’unità trainante alla pro-fondità di 60 m e il centro acustico della cor-tina 25 m più profondo (con una velocità di traino di 3-4 nodi, secondo il grafico di pag. A-4). È stata quindi calcolata la distanza d3
come riportato in fig. 4.10
e sono stati rappresentati su un piano cartesiano bidimensionale i valori:
2 2 2 2 cos sin β β ⋅ = ⋅ = d y d x
Ciò ha consentito di ottenere le cinemati-che di effettuazione delle misure riportate nei grafici in appendice 1 alle pagine A-7 e A-9 rispettivamente per la prima e la seconda corsa. I segmenti verdi tratteggiati nelle figu-re inferiori di queste pagine forniscono un riferimento angolare: sono la retta
30°-210° e la retta 150°-330° rispetto all’asse dell’array.
È importante notare come i grafici delle cinematiche di effettuazione delle misure sono di fondamentale importan-za per le decisioni prese riguardo alle analisi dati da effettuare, per la com-prensione di queste ultime e per la veri-fica della loro correttezza, in quanto
(
)
2 2 2 3 60 25 d d = + + (4. 7) d1 d2 β1 β2fig. 4.9 – Sistema sommergibile-cortina-nave
330 m C B A 60 m d2
fig. 4.10 – Vista di fronte della geometria
tridi-(
)
2 2 2 3 60 25 d d = + + 25 mistante, a quale distanza si trovi l’unità campione dal TAS e sotto quale angolo di bearing viene osservata. Nei paragrafi successivi si farà spesso riferimento a questi grafici.
4.5. Rapporto Segnale-Rumore
La dinamica delle prove rappresentata nelle figure di pagg. A-7 e A-9 chiarisce bene dove si colloca la registrazione all’interno di ciascuna delle due prove, registrazione che ha la durata di circa 14 minuti per la prima prova e 12 minuti per la seconda prova.
Come nel caso delle prove di flow noise (paragrafo 4.3), anche nella presente trattazio-ne, il livello di segnale non verrà riportato in acqua, quindi sarà sempre espresso in Volt.
Come detto nel paragrafo 4.3, la registrazione dei dati acustici ricevuti dal sistema To-wed Array è stata effettuata prendendo il segnale nei punti indicati in fig. 4.11, ovvero all’uscita di una stecca posizionata al centro dell’array (segnale stave 38) ed all’uscita dell’array processing, registrando in questo secondo caso il segnale audio relativo alla trac-cia assegnata nella presentazione video tramite la funzione ATT – Automatic Target Tra-cking (segnale ATT).
Mentre per la prova di flow noise è stata costruita una falsa traccia per la registrazione del segnale ATT, dal momento che in quel caso non era presente alcun bersaglio da trac-ciare, per la prova di rumore irradiato è stata tracciata la nave campione. Quindi i dati pre-senti nel segnale ATT sono sempre relativi al fascio in cui si trovava la nave campione i-stante per ii-stante.
Il segnale ATT ed il segnale stave 38 comprendono naturalmente sia il segnale utile s(t), che il rumore di fondo n(t):
( )
t n( )
t s( )
t xATT = ATT + ATT( )
t n( )
t s( )
t x38 = 38 + 38Segnale utile e rumore sono differenti nei due casi di segnale ATT e segnale stave 38 a causa del fatto che i due segnali sono presi in punti diversi della catena di processazione.
Per il rapporto segnale rumore, la potenza di rumore è stata calcolata sul segnale stave
Pre-processing e formazione degli staves Array processing Signal processing Presentazione video (HMI) Idrofono
fig. 4.11 – Schema a blocchi della catena di trattamento dell’informazione ricevuta
Data processing STAVE 38
( )
t x38 ATT( )
t xATT Vin Vout38 VoutATTche durante il primo minuto di registrazione, la nave oggetto delle misure fosse sufficien-temente lontana ed in posizione tale da non fornire contributo di segnale utile nel segnale stave 38 e che pertanto, il primo minuto di registrazione del segnale stave 38 fosse costitui-to dal solo rumore di fondo n(t). Si è ipotizzacostitui-to inoltre che, per la breve durata della regi-strazione dei dati acustici della prova, il rumore ambiente si sia mantenuto immutato.
Inoltre, per ciascuna delle due prove, si è dovuto stimare il tempo impiegato dalla nave a percorrere un lobo di direttività dell’antenna, per poter calcolare la potenza di rumore e la potenza di segnale in un intervallo temporale che fosse inferiore a tale tempo di percorren-za.
Per tale stima è stato calcolato l’angolo a metà potenza del lobo di direttività in direzione broadside dell’array, secondo la formula2:
° ≅ ⋅ ⋅ =0.886 180 1.5 π λ D HPBW
Il valore ricavato dalla formula coincide con quello ricavato dal grafico dell’apertura del fascio di un array lineare di elementi spaziati λ/2 per diverse direzioni di puntamento [1, pag. 57, fig. 3.13]. Questo valore fornisce una stima per difetto dell’apertura angolare dei lobi di direttività dell’array, avendo i lobi in direzione diversa da quella broadside una a-pertura angolare sicuramente superiore.
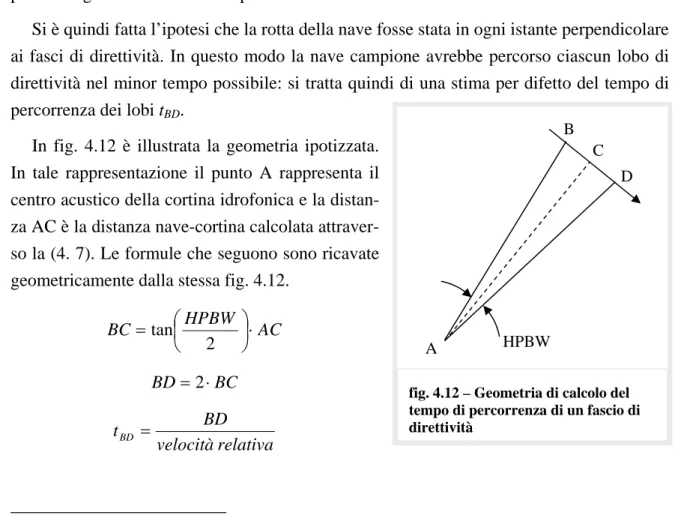
Si è quindi fatta l’ipotesi che la rotta della nave fosse stata in ogni istante perpendicolare ai fasci di direttività. In questo modo la nave campione avrebbe percorso ciascun lobo di direttività nel minor tempo possibile: si tratta quindi di una stima per difetto del tempo di percorrenza dei lobi tBD.
In fig. 4.12 è illustrata la geometria ipotizzata. In tale rappresentazione il punto A rappresenta il centro acustico della cortina idrofonica e la distan-za AC è la distandistan-za nave-cortina calcolata attraver-so la (4. 7). Le formule che seguono attraver-sono ricavate geometricamente dalla stessa fig. 4.12.
AC HPBW BC ⎟⋅ ⎠ ⎞ ⎜ ⎝ ⎛ = 2 tan BC BD= 2⋅ relativa velocità BD tBD = HPBW A B C D
fig. 4.12 – Geometria di calcolo del tempo di percorrenza di un fascio di direttività
Con velocità relativa è stata indicata la velocità relativa fra nave ed unità trainante, che per la prima corsa è stata ritenuta pari a 6 nodi – circa 3 m/s – (considerando rotte perfet-tamente opposte, quindi un’approssimazione della velocità relativa per eccesso) e per la seconda corsa pari a 2 nodi – circa 1 m/s – (considerando le rotte perfettamente parallele).
Calcolando tBD per ogni minuto di registrazione sono stati ottenuti i due grafici riportati
in appendice 1, a pagg. A-10. Il tempo medio di percorrenza di ciascun lobo di direttività per ciascuna delle due corse è riportato nel medesimo grafico: 9 secondi per la prima corsa e 23 secondi per la seconda corsa.
A partire dai valori forniti nel grafico a pag. A-10, si è ritenuto di scegliere i seguenti in-tervalli temporali:
3 secondi per la prima corsa; 6 secondi per la seconda corsa.
Quindi la potenza media di rumore nell’intervallo di osservazione3 è stata calcolata a partire dalla formula dell’energia per segnali discreti (il segnale della registrazione è cam-pionato con frequenza di campionamento 7808 Hz), per la prima e la seconda corsa, rispettivamente nei 3 e nei 6 secondi centrali del primo minuto di registrazione. La scelta della posizione centrale all’interno della registrazione per il calcolo della potenza media di rumore nell’intervallo di osservazione è stata dettata dal voler essere sicuri dell’assenza di eventuali errori di registrazione all’inizio ed alla fine della stessa.
( )
∑
+ = = k M k i T N n i M P 2 38 1avendo indicato con M il numero di campioni di interesse, e con k l’istante iniziale di os-servazione, calcolati come:
M = (frequenza di campionamento)*(intervallo temporale di interesse [sec])
k = (frequenza di campionamento)*[(istante centrale del primo minuto [sec] – (metà dell’intervallo temporale di interesse [sec])]
In termini logaritmici e riferendosi al segnale all’uscita degli idrofoni:
( )
10( )
38 2 10 10 log log 10 38 i M GT n P M k k i T N ⎟− ⋅ − ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ =∑
+ = (4. 8)ove nello specifico caso, si è considerato k = 7808*29 per entrambe le corse e M = 7808*3 per la prima corsa e M = 7808*6 per la seconda corsa.
3
Si è considerato di poter calcolare la potenza di rumore come potenza media nell’intervallo di osservazione [9, pag. 10] poiché il tempo di osservazione considerato è molto superiore al tempo di decorrelazione del
La (4. 8) fornisce la potenza di rumore in dB//V utilizzata per tracciare i grafici di rap-porto segnale rumore riportati in appendice 1 alle pagg. A-12 ed A-14.
Con lo stesso procedimento e le stesse notazioni relative al rumore, la potenza media di segnale nell’intervallo di osservazione è stata calcolata lungo tutta la durata del segnale xATT(t) e x38(t), per la prima e la seconda prova rispettivamente su intervalli di 3 secondi sovrapposti di 1,5 secondi e su intervalli di 6 secondi non sovrapposti, secondo le formule (4. 9) e (4. 10)4.
[ ]
∑
+( )
= = k M k i ATT X x i M k P ATT 2 1 (4. 9)[ ]
∑
+( )
= = k M k i X x i M k P 38 2 1 38 (4. 10)avendo indicato con M il numero di campioni di interesse, e con k l’istante iniziale di os-servazione, calcolati come:
M = (frequenza di campionamento)*(intervallo temporale di interesse [sec])
k = (frequenza di campionamento)*[(n *( intervallo temporale di interesse [sec]– tempo di sovrapposizione [sec])], con n = 1,2,…,M-(intervallo temporale di interesse [sec])
In termini logaritmici e riferendosi al segnale all’uscita degli idrofoni:
[ ]
( )
( )
ATT M k k i T V dB X k x i M GT P ATT ATT ⎟− ⋅ − ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ =∑
+ = 10 2 10 // log 10 log 10 (4. 11)ove nello specifico si è considerato k = 7808*n1*1,5 per la prima corsa e k = 7808*n2*6 per la seconda corsa, essendo n1 = 1,2,…,M-(3) ed n2 = 1,2,…,M-(6) e con M = 7808*3 per la prima corsa e M = 7808*6 per la seconda corsa.
Il rapporto segnale rumore è stato quindi calcolato per il segnale ATT e per il segnale stave 38, su entrambe le corse, come:
[ ]
[ ]
V dB N V dB X dB ATT k P k P SNR ATT // // − = (4. 12)[ ]
[ ]
V dB N V dB X dB P k P k SNR // // 38 = 38 − (4. 13)e sono stati ottenuti i grafici del rapporto segnale rumore in funzione del tempo, riportati in appendice 1 alle pagg. A-12 e A-14 rispettivamente per la prima e per la seconda corsa. In
4
ordinate, i valori in dB del rapporto segnale rumore relativamente al segnale ATT sono sta-ti normalizzasta-ti:
[ ]
[ ]
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − − = V dB N V dB X V dB N V dB X dB ATT k P k P P P SNR ATT ATT // // // //ovvero è stato sottratto ai valori di SNR ottenuti attraverso la (4. 12) e (4. 13) il rapporto segnale rumore relativo all’istante centrale del primo minuto di registrazione.
L’operazione di normalizzazione appena descritta trova ragione di essere effettuata nel fatto che, come detto nel paragrafo 4.3, non è stato possibile riportare in acqua il livello di segnale, pertanto si è reso necessario, per chiarezza di interpretazione, riferire i diagrammi di SNR ad un livello da considerare come 0, il livello
V dB N V dB X P P ATT // // − .
Osservando i grafici di pag. pag. A-12 si nota come per la prima corsa ci sia una pro-fonda differenza fra il rapporto segnale rumore calcolato sul segnale ATT ed il rapporto se-gnale rumore calcolato sul sese-gnale stave 38. In particolare è evidente come, a partire dall’ottavo minuto di registrazione, il rapporto segnale rumore decresce, mentre invece per
[ ]
dB ATT kSNR ci si aspetterebbe il medesimo andamento di
[ ]
dB kSNR38 . Dal confronto
con i grafici di pag. A-7 è evidente come la nave campione nei minuti 8-10 sia in fase di avvicina-mento alla cortina idrofonica. Dopo il decimo minu-to si osserva un picco del rapporminu-to segnale rumore, poi un rapido decremento e quindi, dopo l’undicesimo minuto, un andamento che trova ri-scontro nella cinematica della prova, dal momento che nel minuto 11,6 è raggiunto il punto di massimo avvicinamento ed ha quindi inizio l’allontanamento.
Per comprendere le ragioni dell’anomalo anda-mento di
[ ]
dB ATT k
SNR della prima prova, è
neces-sario introdurre il concetto di aspect, illustrato in fig. 4.13. Si definisce aspect (α) l’angolo formato dalla congiungente centro nave-centro TAS (rossa) con l’asse longitudinale della nave (verde).
Per convenzione, all’aspect verranno assegnati
fig. 4.13 – Aspect β2 β2 α Nord Pv
dritto della nave campione e negativi quando relativi al lato sinistro della nave campione. Il concetto di aspect verrà utilizzato anche in seguito, nel paragrafo 4.7.
In appendice 1, a pag. A-11 per la prima corsa e A-13 per la seconda corsa sono riporta-ti i grafici polari che mostrano l’aspect della nave per ogni minuto di registrazione. I grafi-ci sono stati ottenuti dall’elaborazione dei dati GPS della nave. Nella parte superiore delle pagg- A-11 ed A-13 è stato riportato il grafico della distanza della nave dal centro del TAS in superficie, per consentire un rapido confronto dei dati di aspect e distanza.
Dal grafico polare di pag. A-11 si nota come, probabilmente a causa delle condizioni del mare e della elevata velocità relativa fra nave ed unità trainante (6 nodi, pari a circa 3 m/sec), la nave campione non sia stata in grado, nei minuti da 1 a 7, di tenere la rotta piani-ficata per l’effettuazione della prova, né di tenere una rotta costante, ne è prova il fatto che l’angolo di aspect che si sarebbe ipotizzato monotonamente crescente, risulta invece ran-domico. Conseguenza di ciò è stata la perdita della traccia da parte del sistema ATT, che, visto la rapidissima evoluzione dinamica di tipo randomico, non è stato in grado di effet-tuare l’inseguimento del bersaglio attraverso i fasci di direttività dell’array. Quindi è stato necessario effettuare una nuova fase di aggancio da parte del sistema ATT. L’aggancio del bersaglio ha avuto luogo dopo il decimo minuto di registrazione ed è stato seguito da una nuova perdita, causata dal fatto che l’aggancio è avvenuto in una fase in cui l’evoluzione cinematica era troppo rapida (il rilevamento del bersaglio passa da 60° al decimo minuto a 150° al dodicesimo minuto). La funzione di tracciamento di bersagli infatti viene in questo caso usata impropriamente, ovvero per un bersaglio molto vicino e con una rapida evolu-zione cinematica, quando invece si tratta di una funevolu-zione propriamente sviluppata per ber-sagli a grande distanza. Ne è prova la seconda corsa, caratterizzata da un’evoluzione cine-matica molto più lenta, nella quale l’ATT ha seguito correttamente la nave campione, così che l’andamento del rapporto segnale-rumore è il medesimo per segnale ATT e per segnale stave 38.
La problematica presentatasi ha portato a scartare il grafico di
[ ]
dB ATT kSNR relativo
al-la prima corsa, per le successive analisi ed a ritenere validi i dati real-lativi a
[ ]
dB k SNR38 .Allo stesso tempo, è stato possibile valutare che fra le due procedure di misura del ru-more irradiato proposte, la seconda (rotte parallele, sullo stesso bordo) è da preferire alla prima, in quanto presenta una evoluzione cinematica più lenta, che consente il corretto funzionamento del sistema ATT anche per distanze ravvicinate. Infatti, come è possibile notare dai grafici a pag. A-14, per la seconda corsa, l’andamento del rapporto segnale
ru-more calcolato a partire dal segnale ATT è il medesimo di quello calcolato a partire dal se-gnale stave 38.
Facendo riferimento al rapporto segnale-rumore relativo ai segnali stave 38 di prima e seconda corsa, si può osservare dai grafici forniti alle pagg. A-12 ed A-14 che per una par-te consispar-tenpar-te delle registrazioni l’SNR supera i 6 dB, ovvero il livello considerato adegua-to per l’effettuazione delle misure di segnatura acustica. Il massimo valore di rapporadegua-to se-gnale rumore, raggiunto in corrispondenza del massimo avvicinamento della nave campio-ne al TAS è di oltre 15 dB per la prima corsa e oltre 10 dB per la seconda corsa, livelli che possono considerarsi ottimi per gli scopi esposti.
4.6. Analisi spettrale
L’analisi spettrale dei segnali registrati è stata condotta con lo scopo di visualizzare ed analizzare l’andamento medio dello spettro in banda larga ed evidenziare eventuali righe frequenziali appartenenti al bersaglio.
Per raggiungere questo obiettivo è stato preso in considerazione il segnale ATT per en-trambe le corse. È all’interno di questo tipo di segnale che sono da ricercare le informazio-ni relative alla nave campione: tramite la funzione di inseguimento ATT, è stato registrato il segnale ricevuto nel fascio di direttività in cui era presente il bersaglio di interesse, istan-te per istanistan-te. Quindi, sebbene nel paragrafo 4.5 sia stata notata la perdita dell’aggancio al bersaglio da parte del sistema ATT nel corso della prima prova, le informazioni spettrali di interesse non possono comunque essere ricercate nel segnale stave 38, ma solo nel segnale ATT. Tuttavia, dal momento che le informazioni relative alla caratterizzazione acustica che si ricercano sono le medesime nella prima e nella seconda corsa, si è data più rilevanza a quanto estrapolato dallo studio di quest’ultima.
Sia per l’analisi dell’andamento medio dello spettro che per evidenziare eventuali righe frequenziali, è stato essenziale rappresentare, negli istanti di interesse, il rapporto segnale rumore in funzione della frequenza, per poter individuare le bande più significative, quelle con in cui SNR(f) (in dB) fosse significativamente diverso da 0. Per il calcolo dell’SNR(f) è stato utilizzato il segnale stave 38.
La ricerca di righe frequenziali caratteristiche del bersaglio è stata effettuata tramite un lofargramma. All’interno di tale rappresentazione devono tuttavia essere distinte eventuali righe frequenziali appartenenti alla nave campione da righe frequenziali proprie del rumore di fondo. Le prime sono identificabili dal fatto che avranno una intensità variabile con l’intensità del segnale ricevuto proveniente dalla nave campione. Quindi ci si aspetta un picco di intensità nell’istante di massimo avvicinamento, oppure nell’istante in cui la nave campione mostra alla cortina la propria parte più rumorosa, quella poppiera. Righe fre-quenziali che invece presentino una intensità costante saranno da attribuire al rumore di fondo.
Da una prima analisi dei lofargrammi riportati in appendice 1 a pag. A-15 è risultato che non è semplice individuare variazioni di intensità delle righe frequenziali connesse con il movimento reciproco di nave campione e TAS. Questa difficoltà deriva da un tempo di re-gistrazione che per questo tipo di analisi risulta troppo breve in correlazione con la distanze in gioco: sarebbe infatti utile poter apprezzare una consistente variazione dell’intensità di segnale in corrispondenza di una cospicua variazione di distanza fra TAS ed unità campio-ne. Questa osservazione porta a concludere che un miglioramento alla procedura di misura del rumore irradiato può essere apportato aumentando almeno del doppio i tempi di
regi-strazione, in modo da consentire un adeguato allontanamento della nave campione dalla cortina trainata.
Per ovviare alla difficoltà di distinguere righe frequenziali appartenenti alla nave cam-pione da righe frequenziali del rumore di fondo, è stata calcolata la densità spettrale di po-tenza del segnale ricevuto in corrispondenza di particolari posizioni occupate dalla nave campione durante le due prove. Gli istanti in questione sono stati scelti in funzione del bea-ring, ovvero dell’angolo β2 di fig. 4.9.
I risultati ottenuti sono riportati in appendice 1 da pag. A-16 a pag. A-21 per la rima corsa e da pag. A-22 a pag. A-31 per la seconda corsa. A pag. A-15 sono rappresentati i lo-fargrammi5 della prima corsa (parte superiore della pagina) e della seconda corsa (parte in-feriore della pagina).
I rilevamenti scelti per il calcolo della densità spettrale di potenza sono, 45°, 60°, 90°, 120°, 135°, 150° per la prima corsa e 330°, 320°, 310°, 300°, 290°, 280°, 270°, 260°, 250°, 240° per la seconda corsa. Le ragioni di questa scelta sono individuabili osservando le fi-gure Zoom Posizioni Reciproche alle pagg. A-7 e A-9. Sono stati scelti istanti di tempo re-lativi a distanze diverse e ad aspect diversi, in modo tale da poter apprezzare eventuali va-riazioni del livello di segnale connesse con vava-riazioni di distanza e di aspect. In questo modo è stata operata una scansione temporale del segnale, che ha consentito di individuare variazioni nell’andamento medio dello spettro. Inoltre, solo così è stato possibile distingue-re sui grafici di densità spettrale di potenza righe fdistingue-requenziali che pdistingue-resentino una variazione di ampiezza in funzione di distanza ed aspect, qualora provengano dalla nave campione, od un livello costante qualora provengano dal rumore di fondo.
Nella parte superiore delle pagine da A-16 ad A-31 è riportata la densità spettrale di po-tenza. Per il calcolo è stato necessario innanzitutto interpolare (attraverso interpolazione lineare) i dati di bearing, distanza ed aspect per passare da 1 campione al minuto ad 7808 campioni al secondo, al pari delle registrazioni di dati ricevuti. In questo modo è stato pos-sibile ricercare l’istante in cui il dato di bearing eguagliasse il bearing di interesse. Tale i-stante è l’ii-stante relativamente al quale è stata calcolata la FFT del dato temporale e quindi la DSP(f).
Le FFT sono state calcolate in modo tale da avere in frequenza la risoluzione di 1 Hz, quindi su 1 secondo di ascolto. In particolare per la prima corsa è stato considerato un in-tervallo temporale di 3 secondi a cavallo dell’stante di tempo di interesse. In questo inter-vallo temporale sono state considerate 5 finestre di 1 secondo sovrapposte di 0,5 secondi, per ciascuna delle quali è stata calcolata l’FFT e quindi si è stata considerata la media arit-metica delle 5 FFT.