Capitolo 2 - Banco prova per la sperimentazione
L’attività sperimentale sull’attuatore reale sono state eseguite mediante il
sistema di simulazione “Real-Time/Hardware-in-the-loop/Man-in-the-loop”
presente presso i laboratori del DIA e riportato schematicamente in fig. 2-1.
Esso è principalmente costituito dai seguenti apparati:
• Centrale idraulica
• Il banco prova Dowty
• Un attuatore per comandi di Horizontal Tail
• La postazione di comando Host PC
• Unità di calcolo Target PC
Interfaccia TCP/IP Visualizzasione dati simulazione Postazione di comando Hardware Condizionamento LVDT Pistone e LVDT DDV Hardware Alimentazione SOV Hardware Alimentazione DDV PC TARGET
esecuzione del modello
CENTRALE IDRAULICA DISTRIBUTORE BANCO DOWTY ATTUATORE VELIVOLO Pannello di controllo Centrale Idraulica
Fig. 2.1 – Banco prova per l’esecuzione dei test
2.1 Attuatore idraulico
L’attuatore velivolo (fig. 2.2) a disposizione è un attuatore primario per comandi
di volo Fly-By-Wire per Horizontal Tail ed è costituito da un martinetto a doppia
ridondanza idraulica (tandem) e da un modulo di controllo a quadruplice
ridondanza elettrica. Il modulo di controllo dell’attuatore è a sua volta costituito
da una servovalvola proporzionale ad otto vie con motore DDV a quattro
bobine, da un blocco di quattro trasduttori di posizione LVDT per la DDV, da
Engineering Test System (ETS)
un blocco di quattro trasduttori LVDT per il pistone, da due valvole di bypass
(BPV1 e BPV2, una per ogni unità idraulica del martinetto) e dalle due relative
valvole solenoidi (SOV1 ed SOV2) entrambe a quadruplice ridondanza elettrica
Fig. 2.2 – Martinetto tandem con servovalvola DDV per Horizontal Tail
2.2 Engineering Test System
L’Engineering Test System ha lo scopo di inviare segnali di comando al banco
prova ed elaborare i segnali provenienti dai trasduttori montati sull’attuatore, sul
banco prova e sul distributore della centrale idraulica. La postazione di comando
tipica di sistemi di calcolo basati sull’uso del toolbox xPC Target in ambiente
Matlab-Simulink, e viene usata per caricare il modello sul PC Target, per il
controllo dei parametri di simulazione, per l’introduzione di eventuali guasti
idraulici/elettrici e per la memorizzazione e visualizzazione dei risultati.
Il PC Target contiene il modello Simulink con il sistema di controllo, esso invia i
dati alla DDV, alle SOV ed all’unità di controllo del banco Dowty e riceve i
feedback di posizione dai trasduttori della DDV e del pistone. Tra l’ETS e
l’attuatore è presente un’interfaccia (fig. 2.3) che permette di alimentare le
bobine della DDV e le valvole SOV e di condizionare i trasduttori sullo spool
della DDV e del pistone. Attraverso questa interfaccia è inoltre possibile
iniettare guasti elettrici alle bobine della DDV (di circuito aperto e di corto
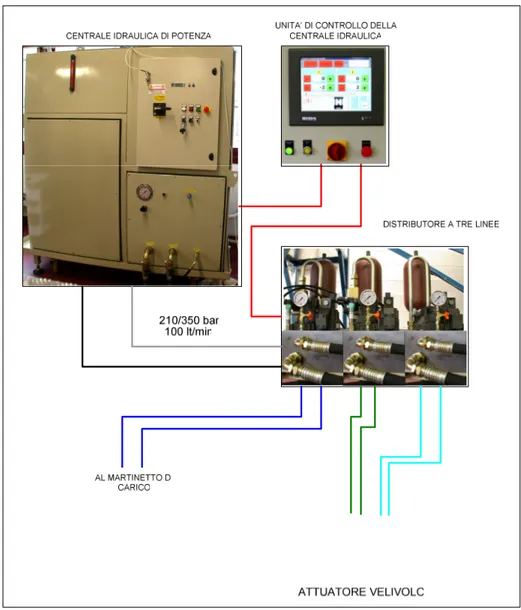
2.3 La centrale idraulica
L’impianto idraulico (fig. 2.4) è costituito da una centrale idraulica di potenza
(portata massima erogabile 100 lt/min ad una pressione di 210 bar), e da un
distributore a tre linee per l’alimentazione delle utenze. In ogni linea
dell’impianto di distribuzione sono presenti:
• Un accumulatore di compensazione
• Una servovalvola proporzionale regolatrice di portata
• Un trasduttore di portata
• Una servovalvola proporzionale regolatrice di pressione
• Un trasduttore di pressione
Le portate e le pressioni posso essere regolate mediante l’unità di controllo della
2.4 Pianificazione delle prove sperimentali
La messa a punto dei parametri del modello è stata realizzata confrontando i
risultati di simulazione con i dati raccolti mediante una campagna di test
effettuata sulla servovalvola DDV e sull’attuatore.
Sono state eseguite tre tipi di prove:
• Risposta in frequenza
• Risposta temporale del sistema ad ingresso sinusoidale
• Risposta temporale del sistema ad onda quadra
La risposta in frequenza ha permesso di valutare i coefficienti di efflusso
attraverso le luci della servovalvola mentre le risposte temporali sono state prese
in considerazione per valutare i fenomeni di attrito. L’analisi della risposta in
frequenza è stata ottenuta mediante un apposito codice sviluppato presso il DIA
(App. A). Per la messa a punto dei parametri del modello è stata presa in
considerazione la condizione operativa normale, e successivamente sono state
prese in considerazione le configurazioni in presenza di guasti, ricavando per
ognuna la risposta in frequenza.
Sono stati presi in considerazione i seguenti guasti:
• Failure idraulica su uno dei due circuiti
• Failure elettrica di circuito aperto (C.A.) sulla bobina della DDV
• Failure elettrica di corto circuito (C.C.) sulla bobina della DDV
ed un circuito idraulico guasto. In base a queste considerazioni ed al fatto che il
comportamento dinamico della DDV non risulta influenzato dalla posizione
della bobina guasta [8], le possibili condizioni operative del sistema risultano
essere 18, e sono riportate nel dettaglio in tabella 2-1. Nel presente lavoro lo
studio si è concentrato su un sottoinsieme delle suddette condizioni scelto in
modo da essere sufficientemente rappresentativo dell’intera gamma operativa.
Prova n° SOV 1 SOV 2 Bobina Bobina Bobina Bobina
1 0 0 attiva attiva attiva attiva
2 0 0 C.A. attiva attiva attiva
3 0 0 C.A. C.A. attiva attiva
4 0 0 C.A. C.C. attiva attiva
5 0 0 C.C. C.C. attiva attiva
6 0 0 C.C. attiva attiva attiva
7 0 1 attiva attiva attiva attiva
8 0 1 C.A. attiva attiva attiva
9 0 1 C.A. C.A. attiva attiva
10 0 1 C.A. C.C. attiva attiva
11 0 1 C.C. C.C. attiva attiva
12 0 1 C.C. attiva attiva attiva
13 1 0 attiva attiva attiva attiva
14 1 0 C.A. attiva attiva attiva
15 1 0 C.A. C.A. attiva attiva
16 1 0 C.A. C.C. attiva attiva
17 1 0 C.C. C.C. attiva attiva
18 1 0 C.C. attiva attiva attiva
Tabella 2.1 – Pianificazione delle prove sperimentali(0=SOV attiva, 1=SOV disattivata, CC=guasto di corto circuito sulla bobina, CA=guasto di circuito aperto sulla bobina)