3
Leggi di controllo per la servovalvola DDV
I modelli sviluppati nel capitolo 2 sono stati impiegati per progettare diverse tipologie di leggi di controllo al fine di rendere la risposta in ciclo chiuso della servovalvola conforme a fissati requisiti di specifica.
Gli effetti di ognuna delle leggi di controllo prese in considerazione sono stati valutati sia sul modello linearizzato, opportunamente tarato per approssimare la risposta ai piccoli comandi, che sul modello semiempirico, ed infine implementati per il controllo della servovalvola reale e verificati sperimentalmente.
Poiché una prima serie di prove ha messo in luce notevoli differenze tra il comportamento della servovalvola reale e quello stimato dal modello semiempirico è stato necessario introdurre nel modello un ulteriore coefficiente di correzione che tenesse contro dell’aumento degli attriti oltre una certa soglia di velocità dello spool.
3.1
Architettura del controllo
Il controllo del sistema di attuazione è realizzato mediante due cicli chiusi: uno sulla posizione dello spool (ciclo interno) ed uno sulla posizione del pistone (ciclo esterno) (figura 3.1). La posizione del pistone dipende sia dal comando di tensione alla servovalvola (e del comportamento dinamico di quest’ultima) che dalle forze esterne; la posizione dello spool dipende dal comando di tensione impartito alla servovalvola ed in generale anche dal particolare stato dinamico dell’attuatore, in quanto il passaggio di portata attraverso le luci di trafilamento determina la presenza di forze di flusso che agiscono sullo spool stesso.
Se si ipotizza che la dinamica dello spool della DDV sia indipendente dalla dinamica del martinetto (in particolare nell’ipotesi di assenza di forze di flusso o di indipendenza di queste dalla dinamica del martinetto), la dinamica dello spool ed il ciclo di controllo interno possono essere studiati come un sistema indipendente, secondo lo schema di figura 3.2.
Figura 3.2 – Architettura del controllo del sistema di attuazione ipotizzando che la dinamica dello spool della DDV sia indipendente dalla dinamica del martinetto.
Quando il sistema è implementato sul velivolo, entrambi i cicli di controllo sono realizzati con tecnologia digitale DSP (Digital Signal Processing) mediante apposite schede d’interfaccia dell’attuatore (schede AIM, Actuator Interface Module) e sono elaborati con una diversa frequenza di campionamento (600 Hz per il ciclo di controllo dell’attuatore, 1200 Hz per quello della servovalvola DDV) [1].
3.2
Requisiti di risposta in frequenza di ciclo chiuso
I requisiti sulla risposta dinamica di ciclo chiuso della DDV sono forniti tramite curve limite di accettazione sulla risposta in frequenza e sono definiti per una condizione di funzionamento senza passaggio di portata dalle luci di trafilamento. In base a quanto detto nel paragrafo 3.1 le leggi di controllo per la servovalvola saranno realizzate trattando il componente come un sistema isolato.
La figura 3.3 mostra le curve limite che vengono fornite dal costruttore per comandi di piccola ampiezza (+/- 0.075 mm), ma che nell’ambito di questo lavoro definiscono anche le prestazioni obiettivo per comandi di grande ampiezza: in altre parole si è cercato di sviluppare le leggi di controllo in modo tale che i requisiti imposti per i comandi di piccola ampiezza tendessero ad essere soddisfatti anche per comandi di grande ampiezza.
Figura 3.3 – Requisiti sulla risposta dinamica di ciclo chiuso della servovalvola
3.3
Controllo proporzionale
Figura 3.4 – Architettura del controllo di tipo proporzionale implementata nel modello matlab-simulink
La legge di controllo più semplice che è possibile realizzare per il sistema in ciclo chiuso è di tipo proporzionale: l’errore tra la posizione richiesta e la posizione misurata (dal sensore) viene moltiplicato per un guadagno fissato ed inviato come comando alla servovalvola. (figura 3.4).
Per mettere in evidenza come tende a variare la posizione dei poli e degli zeri del sistema quando si chiude il loop, e per avere una stima di prima approssimazione sui margini di stabilità, è stata utilizzata una funzione di trasferimento di ciclo aperto della DDV la cui struttura è la medesima del modello linearizzato descritto nel paragrafo 2.3, ed i cui parametri sono stati opportunamente tarati per approssimare la dinamica in ciclo aperto del componente ai piccoli comandi e nell’intervallo di frequenze più critico per il rispetto dei requisiti in ciclo chiuso (20-40 Hz) (tabella 3.1):
(
)
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⋅ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⋅ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⋅ + = 1 1 1 1 ) ( ˆ SVHF SVLF SA LVDT SV SVOL p s p s p s s K s G τ (3.1)La figura 3.5 mostra il confronto tra la risposta di ciclo aperto fornita dalla f.d.t. (3.1) e la risposta sperimentale.
Parametro Valore Numerico
SV
K Guadagno della servovalvola DDV 0.86
LVDT
τ Costante di tempo del condizionatore 1·10-3 s
SA
p Polo servo-amplificatore 670.5 rad/s
SVLF
p Polo di bassa frequenza (dinamica spool) 39.5 rad/s
SVHF
p Polo di altissima frequenza (dinamica spool) 1.8·104 rad/s
Tabella 3.1 – Valori numerici dei parametri inseriti per tarare il modello linearizzato sulla dinamica di ciclo aperto della DDV per comandi di piccola ampiezza (1V)
A partire dalla f.d.t. di ciclo aperto, la funzione di trasferimento in ciclo chiuso si può ricavare nel modo seguente:
) ( ˆ ) ( 1 ) ( ˆ ) ( ) ( ˆ s G s F K s G s F K s G SVOL HF SVOL HF SVCL ⋅ ⋅ + ⋅ ⋅ = (3.2)
nella quale si considera anche il filtro di alta frequenza a monte del servo-amplificatore (par. 2.7.1): 1 3500 1 1 ) ( + = s s FHF
Le figure 3.6 e 3.7 mostrano il luogo delle radici della funzione di trasferimento del sistema al variare del guadagno, mentre la figura 3.8 riporta il diagramma di Bode generalizzato della f.d.t. di ciclo aperto.
Si può osservare che per valori del guadagno sufficientemente elevati, la chiusura del
loop di controllo determina una interazione tra il polo di bassa frequenza, legato alla
dinamica dello spool, ed il polo legato alla dinamica del servo-amplificatore generando una coppia di poli complessi coniugati; il polo legato alla dinamica del condizionatore viene spostato a frequenze più elevate, mentre non subiscono apprezzabili variazioni il polo di altissima frequenza, legato alla dinamica dello spool, ed il polo di alta frequenza introdotto nel sistema dal filtro a monte del servo-amplificatore.
Figura 3.6 – Luogo delle radici per la f.d.t. della servovalvola
L’utilizzo del toolbox Sisotool di Matlab ha permesso di confrontare graficamente la risposta in frequenza di ciclo chiuso (realizzata con la f.d.t. di ciclo aperto (3.1)) con le curve di accettazione per diversi valori del guadagno di chiusura.
Con un valore di K pari a 6 (circa 16 dB) si riesce a rendere tale risposta conforme ai requisiti, sebbene con poco margine (figura 3.9).
Figura 3.9 – Risposta di ciclo chiuso della servovalvola – Controllo Proporzionale Modello linearizzato (f.d.t. (3.1))
Il diagramma di Bode generalizzato (figura 3.8) mostra che per tale valore del guadagno il sistema linearizzato è stabile con ampi margini di ampiezza (circa 16 dB) e di fase (circa 71°).
E’ necessario puntualizzare che, come già osservato nel capitolo 2, un aumento dell’ampiezza del comando produce un aumento della risposta in ampiezza di ciclo aperto (figura 2.20) determinando di conseguenza una riduzione del margine di stabilità: tuttavia, poiché la differenza tra la risposta ad un comando pari a 1V e la risposta ad un comando pari a 3V è sempre inferiore a 3 dB si può concludere che con il guadagno scelto la stabilità è garantita anche per il sistema reale.
L’espressione numerica della f.d.t. di ciclo chiuso linearizzata per K pari a 6 è la seguente: ) 10 3 . 1 7 . 436 )( 1298 )( 3475 )( 10 8 . 1 ( 1 10 6 . 8 ) ( ˆ 5 2 4 15 ⋅ + + + + ⋅ + ⋅ = s s s s s s GSVCL (3.3)
Figura 3.10 – Andamento della risposta di ciclo chiuso della servovalvola al variare dell’ampiezza del comando prevista dal modello semiempirico
________________________________________________________________________________________________________________________________________________________________________________________________________________ 45
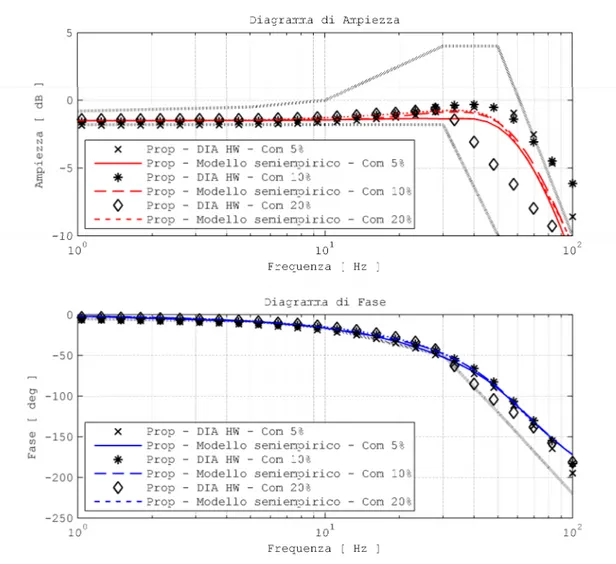
La figura 3.10 mostra invece la risposta del sistema in ciclo chiuso prevista dal modello semiempirico al variare dell’ampiezza del comando: per piccoli comandi (5% del comando massimo) la risposta del modello Matlab-Simulink risulta prossima a quella della f.d.t. linearizzata (3.3) fino a frequenze di circa 30 Hz; per frequenze superiori alla banda passante, a causa dell’attenuazione propria del sistema, l’errore tra la posizione comandata e la posizione misurata aumenta determinando un aumento della tensione di comando (figura 3.11): questo si traduce (figura 2.20), in un incremento della risposta rispetto a quanto previsto dal modello linearizzato. Per un valore del comando pari al 20% del comando massimo il modello prevede un incremento della risposta in ampiezza per l’intervallo di frequenze compreso tra 10 e 60 Hz, effetto che è ancora riconducibile alle nonlinearità legate alla diminuzione degli attriti all’aumentare del comando evidenziate nel paragrafo 3.4 (figura 3.11).
Per grandi comandi l’andamento qualitativo della risposta cambia completamente: ciò accade, come anticipato nel paragrafo 2.7.1, a causa della saturazione del comando al servo-amplificatore che limita l’azione di controllo (figura 3.11).
Figura 3.11 – Risposta in ampiezza del sistema prevista dal modello semiempirico in relazione con tensione di comando al servo-amplificatore*
Considerando unicamente i risultati previsti dal modello semiempirico si potrebbe affermare che un controllo di tipo proporzionale, per un ampiezza del comando inferiore al 20% circa , è in grado di rispettare i requisiti imposti con un margine molto piccolo; al contrario per comandi di maggiore ampiezza la saturazione associata al limite sulla tensione di comando al servo-amplificatore impedisce di rispettare i requisiti.
E’ stata dunque effettuata una serie di prove sperimentali implementando il controllo nel sistema reale per verificare l’efficacia del controllo stesso e l’attendibilità dei risultati forniti dal modello: i risultati ottenuti mostrano che ci sono alcune differenze rilevanti tra la risposta prevista dal modello e la risposta effettiva (figura 3.12).
Figura 3.12 – Confronto tra la risposta del modello semiempirico e la risposta sperimentale
Per comandi pari al 5% e al 10% del comando massimo la risposta sperimentale è ben approssimata dal modello solo fino a frequenze di circa 40 Hz, mentre per frequenze superiori presenta una risposta in ampiezza superiore e tale da non rispettare i
In questo caso la differenza tra la risposta sperimentale e quella del modello può essere spiegata considerando che nell’intervallo di frequenze sopradetto è già stata osservata una differenza qualitativamente analoga per le risposte di ciclo aperto (figura 2.24) .
Per un comando pari al 20% del comando massimo e per frequenze superiori a 30 Hz, la risposta della servovalvola reale è tale da far pensare alla presenza di una saturazione di velocità. Il fenomeno non può essere tuttavia attribuito alla saturazione del comando, poiché nella situazione in esame l’ampiezza della tensione di comando è certamente inferiore al fondoscala (figura 3.11).
3.4
Affinamento del modello: variazione del
coefficiente di smorzamento
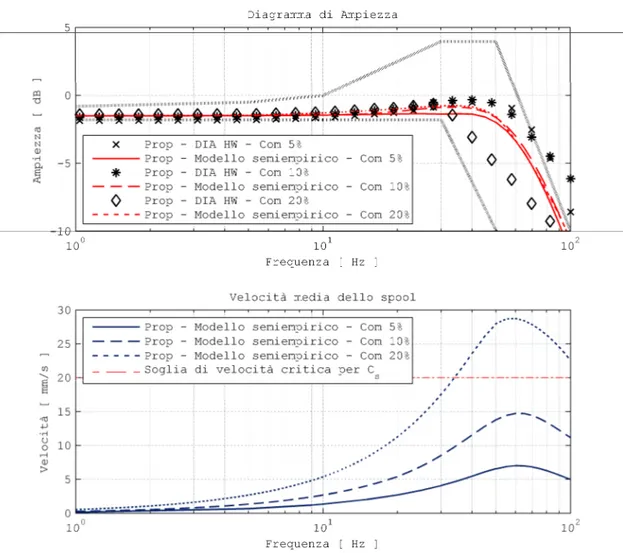
L’andamento della velocità media dello spool in funzione della frequenza mostra che le velocità più elevate si raggiungono in alta frequenza ed aumentano con l’ampiezza del comando (figura 3.13).
Figura 3.13 – Confronto in frequenza tra la risposta in ampiezza e la velocità media dello spool
Questo ha suggerito che il fenomeno osservato sperimentalmente può essere legato ad un incremento del coefficiente di smorzamento in corrispondenza di elevati valori di velocità dello spool.
E’ stata quindi inserita nel modello simulink una funzione di correzione per il coefficiente di smorzamento:
( )
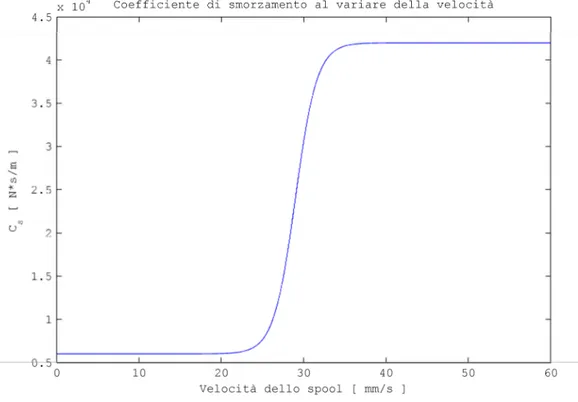
⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − ⋅ + + = SCALE s LIMIT s s MAX s MAX s MIN s s s x x x C C C xC & tanh &
2
2 (3.4)
dovexsLIMIT , che determina il valore di velocità a partire dal quale è stato imposto l’aumento del coefficiente di smorzamento, è stato ricavato mediante un confronto in frequenza tra la risposta in ampiezza sperimentale e la velocità media dello spool stimata dal modello (figura 3.13), mentre i valori minimo e massimo (CsMIN e CsMAX) sono stati scelti in modo tale da rendere la risposta del modello più vicina alla risposta sperimentale in tutto l’intervallo di possibili valori di ampiezza del comando.
La figura 3.14 mostra l’andamento del coefficiente di smorzamento al variare della velocità dello spool assegnando ai parametri i valori numerici scelti (tabella 3.2) mentre la figura 3.16 mostra come la funzione di correzione è stata implementata nel modello Matlab-Simulink.
Figura 3.14 – Andamento del coefficiente di smorzamento Cs al variare
Parametro Valore Numerico
MIN s
C Valore minimo del coefficiente di smorzamento 6000 N·s/m
MAX s
C Valore massimo del coefficiente di smorzamento 42000 N·s/m
LIMIT s
x Valore di velocità limite per Cs 21 mm/s
SCALE s
x - 2.6 mm/s
Tabella 3.2 –Valori numerici scelti per i parametri dell’equazione (3.4)
Con l’introduzione della funzione di correzione del coefficiente di smorzamento la risposta prevista dal modello risulta più vicina a quella sperimentale (figura 3.15): sebbene persistano differenze nelle risposte ai piccoli comandi per frequenze maggiori di 30 Hz, è ben riprodotto il fenomeno della “saturazione in velocità” per comandi maggiori (20%), come è possibile osservare dall’andamento in frequenza della velocità media (figura 3.17).
Figura 3.15 – Confronto tra la risposta del modello semiempirico modificato con la funzione di correzione di Cs e la risposta sperimentale
Figura 3.17 – Andamento in frequenza della velocità media dello spool (modello semiempirico modificato con la funzione di correzione di Cs)
3.5
Controllo proporzionale con rete
ritardatrice-anticipatrice
I risultati sperimentali hanno mostrato che un semplice controllo proporzionale non consente di rispettare i requisiti. Infatti le risposte in ampiezza relative a comandi pari al 5% e 20% oltrepassano in alta frequenza la curva limite di accettazione superiore: il problema non si può risolvere con una diminuzione del guadagno poiché sia la risposta in ampiezza sia la risposta in fase sono a ridosso della curva limite di accettazione inferiore in bassa frequenza.
E’ quindi necessario attenuare la risposta in ampiezza, ma solo per frequenze superiori a 30 Hz: questo effetto si può ottenere con l’inserimento di una opportuna rete ritardatrice-anticipatrice.
I parametri ottimali della rete sono stati individuati tramite il modello linearizzato già impiegato per prevedere la risposta di ciclo chiuso del sistema con il controllo proporzionale e l’impiego del toolbox di matlab Sisotool.
La rete scelta (3.5), introduce un polo in corrispondenza di 200 rad/s, con la funzione di ottenere la riduzione in ampiezza desiderata, ed uno zero in corrispondenza di 400 rad/s per evitare una eccessiva pendenza della curva di risposta in fase; il guadagno K è stato poi aumentato a 7 per compensare l’attenuazione ed il ritardo che la rete introduce a frequenze inferiori a 30 Hz (figura 3.18):
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = 1 200 1 1 400 1 ) ( s s s LL (3.5)
La funzione di trasferimento di ciclo chiuso linearizzata è data da:
) ( ˆ ) ( ) ( 1 ) ( ˆ ) ( ) ( ) ( ˆ s G s F s LL K s G s F s LL K s G SVOL HF SVOL HF SVCL ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ = (3.6)
La figura 3.19, mostra l’effetto che si ottiene sulla risposta di ciclo chiuso del modello linearizzato tramite l’introduzione della rete (3.5).
Le figure 3.20, 3.21 e 3.22 mostrano il luogo delle radici della (3.6) al variare di
K ed il diagramma di Bode generalizzato relativo alla funzione di ciclo aperto del
sistema (LL(s)⋅FHF(s)⋅GSV(s)), che, in base alle medesime considerazioni esposte nel caso del controllo proporzionale semplice (paragrafo 3.3), garantiscono la stabilità del sistema per il valore del guadagno scelto.
Figura 3.18 – Diagramma di Bode della rete ritardatrice-anticipatrice scelta
Figura 3.19 – Effetto dell’inserimento della rete ritardatrice-anticipatrice sulla risposta di ciclo chiuso del modello linearizzato
Figura 3.20 – Luogo delle radici per la f.d.t. di ciclo chiuso (con rete)
L’espressione numerica della f.d.t. di ciclo chiuso del sistema linearizzato, con l’introduzione della rete e per un guadagno K pari a 7 è la seguente:
) 10 2 . 6 2 . 229 )( 2 . 516 )( 1178 )( 3486 )( 10 8 . 1 ( ) 400 ( 10 0 . 5 ) ( ˆ 4 2 4 15 ⋅ + + + + + ⋅ + + ⋅ = s s s s s s s s GSVCL (3.7) Per verificare la reale efficacia di questa soluzione, il controllo con rete ritardatrice-anticipatrice è stato implementato prima nel modello Matlab-Simulink (figura 3.23), e in seguito nel controllo della servovalvola reale.
Figura 3.23 – Implementazione del controllore nel modello Matlab-Simulink
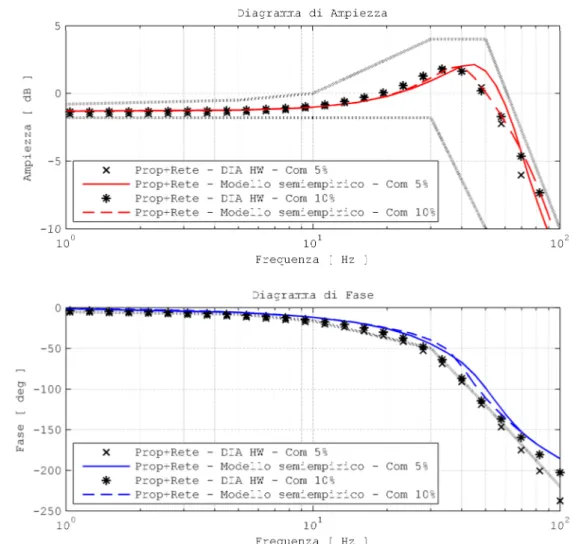
I risultati mostrano che per comandi di piccola ampiezza (5%, 10%), questo tipo di controllo è in grado di soddisfare i requisiti, come illustrato in figura 3.25 (anche se in alcuni punti specifici la risposta in fase risulta essere inferiore alla curva limite di accettazione, gli scostamenti da quest’ultima sono tali da ritenere i requisiti globalmente soddisfatti).
Figura 3.25 – Risposta di ciclo chiuso del sistema controllato con rete ritardatrice-anticipatrice – Piccoli comandi
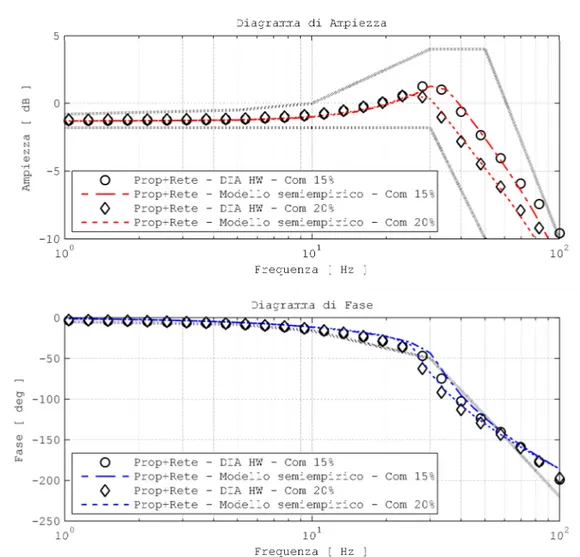
Per comandi di ampiezza intermedia (15%, 20%), a causa dell’aumento degli attriti viscosi con la velocità dello spool discusso nel paragrafo 3.4, viene introdotto un brusco ritardo osservabile nel diagramma di fase che rende la risposta non conforme alle specifiche (figura 3.26).
Nel paragrafo 3.6 verrà illustrato un controllo volto alla risoluzione di questo inconveniente.
Figura 3.26 – Risposta di ciclo chiuso del sistema controllato con rete ritardatrice-anticipatrice – Medi comandi
Per comandi di grande ampiezza (50% e superiori), la saturazione del comando in ingresso al servo-amplificatore causa l’attenuazione della risposta in ampiezza ed introduce notevoli ritardi (figura 3.27), come già osservato nel paragrafo 3.3 nel caso del controllo proporzionale.
Il buon accordo tra le risposte sperimentali e le risposte previste dal modello semiempirico confermano che quest’ultimo è in grado di rappresentare la dinamica del sistema con ottima approssimazione.
Figura 3.27 – Risposta di ciclo chiuso del sistema controllato con rete ritardatrice-anticipatrice – Grandi comandi
3.5.1 Risposta ad una storia di comando randomica
Come già discusso nel paragrafo 2.7.1 la risposta in frequenza caratterizza il comportamento della servovalvola quando lo spool si muove attorno alla posizione centrata.
Per caratterizzarne completamente le prestazioni e garantire l’efficacia del controllo per ogni tipologia di comando ed in particolare quando lo spool si muove mantenendosi in prossimità del fondocorsa, la servovalvola è stata comandata con un segnale costituito da una sequenza di gradini ad ampiezza variabile: l’ampiezza dei gradini è stata scelta in modo tale che il segnale fosse plausibilmente rappresentativo di una storia di comando impartita alla servovalvola durante l’effettivo utilizzo del sistema sul velivolo.
Figura 3.28 – Risposta temporale del sistema ad una storia di comando Controllo con rete ritardatrice-anticipatrice
I risultati sperimentali mostrano che il controllo con rete ritardatrice-anticipatrice è stabile ed in grado di mantenere costante la posizione dello spool anche vicino al fondocorsa.
Figura 3.29 – Risposta temporale del sistema ad una storia di comando Controllo con rete ritardatrice-anticipatrice (zoom)
Ingrandendo la scala è possibile osservare oscillazioni di alta frequenza (circa 1000 Hz) nella risposta sperimentale (figura 3.29). L’entità e la frequenza delle oscillazioni fanno escludere l’ipotesi che queste rappresentino effettivi movimenti dello spool: si ritiene piuttosto che queste siano dovute ad una amplificazione dei disturbi elettrici associati al trasduttore di posizione, dal momento che la frequenza portante del sensore LVDT è dello stesso ordine di grandezza.
Applicando un filtro del secondo ordine (polo a circa 320 Hz) al segnale in uscita si riescono ad escludere tali disturbi (figura 3.30).
Figura 3.30 – Effetto dell’applicazione di un filtro del secondo ordine sulla risposta.
E’ inoltre possibile confrontare la risposta sperimentale con la risposta del modello semiempirico in modo da valutarne le capacità predittive.
La figura 3.32 mostra che il modello riproduce abbastanza fedelmente la dinamica del sistema reale sebbene con un anticipo temporale che si accentua all’aumentare dell’ampiezza del comando. Il ritardo del sistema reale è dovuto in parte alla presenza di attriti tra la cassa e lo spool che devono essere vinti prima che questo possa iniziare a muoversi: infatti traslando rigidamente la curva di risposta del modello, per comandi di piccola ampiezza, la risposta sperimentale e quella del modello qualitativamente coincidono (figura 3.33 e 3.32).
Figura 3.32 – Confronto tra la risposta temporale sperimentale e quella del modello Grandi Comandi
Per comandi di grande ampiezza, operando la medesima traslazione, si mette in evidenza che esiste un ritardo di diversa natura: questo si può spiegare considerando che la funzione di correzione del coefficiente di smorzamento è stata tarata sulla risposta in frequenza (paragrafo 3.4) ed è quindi adatta a simulare l’effetto medio dell’aumento degli attriti viscosi con la velocità, ma non è in grado di riprodurne fedelmente l’effetto sulla risposta temporale.
________________________________________________________________________________________________________________________________________________________________________________________________________________ 65
3.6
Controllo con rete e “Command Boost”
3.6.1 Logica del controllo
Nel paragrafo 3.5 è stato illustrato come il controllo con rete ritardatrice-anticipatrice pur rispettando i requisiti per piccoli comandi (5-10%), non rispetta i requisiti di fase per medi (15-20%) e grandi comandi (50%).
Nel caso di grandi comandi, la saturazione del segnale in ingresso al servo-amplificatore impedisce alla logica del controllo di operare correttamente: infatti, una parte della tensione in ingresso dovrebbe essere sempre proporzionale all’errore che si registra tra la posizione comandata e la posizione misurata dello spool, ma per un valore di errore sufficientemente grande tale quota risulta superiore al fondoscala dell’ingresso al servo-amplificatore. Alle frequenze per le quali ciò accade, è possibile osservare una attenuazione della risposta in ampiezza e l’introduzione di un brusco ritardo di fase (figura 3.27).
La frequenza per la quale il comando inizia a saturare dipende dal valore della componente del controllo proporzionale all’errore: se questa viene ridotta si riesce a fare in mode che il comando saturi in corrispondenza di frequenze più elevate.
D’altra parte, i requisiti sulla risposta in bassa frequenza impongono l’utilizzo di una componente proporzionale del controllo sufficientemente elevata, il che rende di fatto inevitabile il verificarsi della saturazione a frequenze inferiori a 10 Hz.
Per comandi di ampiezza intermedia il comportamento indesiderato della risposta in frequenza della servovalvola è invece legato all’aumento dello smorzamento in corrispondenza di velocità dello spool superiori ad una certa soglia (paragrafo 3.4). La figura 3.35 illustra l’andamento nel tempo dell’errore, del segnale di comando, della velocità e della posizione dello spool a fronte di un segnale in ingresso sinusoidale di frequenza 30 Hz e ampiezza pari al 20% del fondocorsa (comando medio): è in corrispondenza di questa frequenza che, nel caso del controllo con rete, si osserva la distanza della risposta di fase più elevata oltre la curva limite di accettazione (figura 3.26). Poiché si vuole evidenziare il comportamento qualitativo del sistema le curve sono state adimensionalizzate rispetto ai rispettivi valori di fondoscala*
Si può notare che, oltre la velocità di soglia per l’aumento degli attriti viscosi, sebbene il controllo invii una tensione crescente al servo-amplificatore richiedendo una maggiore forza sullo spool e quindi un valore di velocità più elevato, la velocità tende ad assumere un valore limite costante (si può osservare come la pendenza della curva di spostamento sia all’incirca rettilinea): è questa “saturazione in velocità” che determina l’abbassamento della curva di risposta di fase.
Figura 3.35 – Andamento della tensione di comando, errore, velocità a posizione dello spool a fronte di un segnale in ingresso sinusoidale di frequenza pari a 30 Hz e
ampiezza pari al 20% del fondocorsa – Modello semiempirico
Una possibile soluzione per migliorare le prestazioni del sistema potrebbe essere quella di aumentare il valore della velocità limite incrementando, quando necessario, la forza esercitata dal motore elettrico e quindi la tensione di comando.
Tenendo presente che lo scopo del controllo consiste nel fare in modo che la posizione misurata dello spool insegua quanto più efficacemente possibile la posizione comandata si possono fare inoltre le seguenti osservazioni:
• Quando l’errore tra la posizione comandata e la posizione misurata è negativo lo spool ha superato la posizione comandata e deve quindi decelerare per invertire il senso del moto: in questo caso una maggiore forza di attrito (e più in generale, una maggiore forza contraria al senso del moto) aiuta l’azione di controllo.
• Se lo spool si trova nella condizione di “saturazione di velocità” la dinamica del sistema migliora aumentando il più possibile il valore limite di velocità. Ciò si ottiene incrementando il più possibile la forza esercitata dal motore elettrico ovvero inviando al servo-amplificatore una tensione pari al fondoscala.
• Se lo spool non si trova nella condizione di “saturazione di velocità” il controllo con rete ritardatrice-anticipatrice risulta già in grado di rispettare i
In base a tali osservazioni è stato realizzato un controllo denominato “Command
Boost” che viene illustrato in figura 3.36: al comando generato dal controllo
proporzionale con rete ritardatrice-anticipatrice viene sommato un comando (Boost) che ha lo stesso segno dell’errore ed una ampiezza che è definita ne modo seguente:
(
)
(
)
vMAX sm v TH sm TH TH TH sm vMAX sm v TH sm TH sm sm v TH sm K x K X x X X X x K x K X x X x x K X x = ⇒ ≥ − − = ⇒ < ∩ ≥ = ⇒ < ) ( ) ( 0 ) ( 2 1 2 1 2 1 1 & & & & & & & & & & & & & & & (3.8)dove: x& è la velocità (calcolata) dello spool, sm K &v(xsm)è la funzione che definisce l’ampiezza del Boost (lineare a tratti), KvMAX è il massimo valore del Boost, X&TH1è la
soglia di velocità oltre la quale si applica il Boost, X&TH2è la soglia di velocità oltre la
quale il valore del Boost rimane costante e pari a KvMAX .
La figura 3.37 mostra l’andamento della funzione (3.8), che è stata implementata nel modello Matlab-Simulink tramite una look-up-table inserendo i valori riportati in tabella 3.3: i valori scelti per i parametri sono tali che per velocità dello spool inferiori a
1 TH
X& , al comando del controllo proporzionale con rete non viene sommato alcun contributo, mentre per velocità superiori viene sommato un contributo di entità tale da raggiungere il fondoscala dell’ingresso al servo-amplificatore.
Di conseguenza il valore di KvMAX , purché sufficientemente grande, influenza poco le prestazioni del controllo. Al contrario risulta determinante la scelta del valore di
1 TH
X& che dovrebbe coincidere con il valore di velocità dello spool per il quale l’effetto dell’aumento degli attriti diventa importante.
Figura 3.37 – Funzione che definisce l’ampiezza del Boost
Parametro Valore Numerico
1 TH
X& Velocità di soglia attivazione Boost 22 mm/s
2 TH
X& Velocità di soglia valore CB costante 30 mm/s
MAX
K Valore di massimo Boost 200 V
La velocità dello spool, grandezza non direttamente misurabile nel sistema reale, viene ottenuta moltiplicando il segnale proveniente dal trasduttore di posizione per la funzione di trasferimento seguente:
1 2000 9 . 0 2 2000 1 ) ( 2 + ⋅ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = s s s s D (3.9)
L’azione derivatrice è ottenuta tramite lo zero nell’origine, mentre la coppia di poli complessi coniugati di alta frequenza (320 Hz circa) permette di escludere dal segnale sperimentale i disturbi di alta frequenza associati al trasduttore di posizione (paragrafo 3.5.1).
Le prestazioni di questo tipo di controllo sono state inizialmente valutate con il modello semiempirico.
La figura 3.38 mostra un confronto tra il segnale di comando fornito dal controllo con rete ritardatrice-anticipatrice in assenza o in presenza di Command Boost, (evidenziando anche il legame con segnale di errore) a fronte di un segnale in ingresso sinusoidale di frequenza 30 Hz e ampiezza pari al 20% del fondocorsa, mentre la figura 3.39, mostra un confronto tra l’andamento di posizione e velocità misurate nei due casi.
Questi grafici mettono in evidenza che il controllo con Command Boost permette di anticipare la risposta in velocità e posizione della servovalvola: in particolare la figura 3.38 mostra che il Command Boost agisce in due situazioni:
a) quando lo spool oltrepassa la posizione comandata ovvero l’errore cambia segno, se la velocità dello spool è superiore a quella di soglia (X&TH1), il controllo interviene amplificando il comando che tende a invertire il moto (in questa situazione nel grafico si osservano dei bruschi picchi nella tensione comandata).
b) se la velocità dello spool è superiore alla velocità di soglia (X&TH1), e lo spool si sta muovendo verso la posizione comandata, il controllo interviene amplificando il comando quanto più possibile (ovvero fino alla saturazione), contrastando, in parte, la resistenza al moto dovuta all’aumento agli attriti viscosi. Ciò si traduce in un (leggero) aumento della velocità “limite”.
Figura 3.38 – Confronto tra l’andamento della tensione di comando e dell’errore, in presenza o assenza di Command Boost (30Hz, 20%) – Modello semiempirico
Figura 3.39 – Confronto tra l’andamento di velocità e posizione dello spool in presenza o assenza di Command Boost (30Hz, 20%) – Modello semiempirico
3.6.2 Risposta in frequenza
Le prove effettuate con il controllo illustrato nel paragrafo 3.6.1 mettono in evidenza che il Command Boost introduce un anticipo di fase in corrispondenza di frequenze superiori a 10 Hz che consente di rispettare i requisiti per medi comandi (20% del comando massimo) (figura 3.41)
Per piccoli comandi (10%) si ottengono curve di risposta sostanzialmente simili al controllo proporzionale con rete ritardatrice-anticipatrice ad eccezione di un leggero aumento della risposta in ampiezza per frequenze superiori a 30 Hz che comunque non pregiudica il rispetto dei requisiti (figura 3.40).
Per grandi comandi (50%), a causa della saturazione della tensione in ingresso al servo-amplificatore, anche l’azione del controllo con Command Boost risulta inibita determinando una risposta in frequenza del tutto analoga al controllo in assenza di tale accorgimento (figura 3.42).
Figura 3.40 – Risposta di ciclo chiuso del sistema controllato con rete ritardatrice-anticipatrice e Command Boost – Piccoli comandi
I diagrammi di Bode 3.40, 3.41 e 3.42 mostrano sia i risultati ottenuti sperimentalmente sia quelli previsti dal modello semiempirico che è stato preliminarmente impiegato per scegliere i valori numerici ottimali per la funzione
) ( sm v x
K & (equazione (3.8)). Ancora una volta l’ottimo accordo tra questi dimostra l’efficacia del modello semiempirico a prevedere il comportamento in frequenza del sistema.
Figura 3.41 – Risposta di ciclo chiuso del sistema controllato con rete ritardatrice-anticipatrice e Command Boost – Medi comandi
Figura 3.42 – Risposta di ciclo chiuso del sistema controllato con rete ritardatrice-anticipatrice e Command Boost – Grandi comandi
3.6.3 Risposta ad una storia di comando randomica
Per verificare le prestazioni e la stabilità del controllo a fronte di un più ampio insieme di tipologie di comando, è stata ottenuta sperimentalmente la risposta della servovalvola ad una storia temporale. In modo da poter confrontare i risultati ottenuti nei due casi, la storia di comando è la medesima impiegata per l’analoga verifica del controllo proporzionale con rete (paragrafo 3.5.1).
I dati sperimentali sono stati filtrati con un second’ordine di alta frequenza per eliminare i disturbi associati al trasduttore di posizione.
Figura 3.43 – Risposta temporale del sistema ad una storia di comando Controllo con rete ritardatrice-anticipatrice e Command Boost
L’analisi dei risultati evidenzia anche in presenza di Command Boost, il controllo risulta essere globalmente stabile ed in grado di inseguire il segnale di comando (figura 3.43). Le differenze tra il controllo in presenza o in assenza di Command Boost si osservano solo per comandi medio-grandi (figura 3.44): benché il tempo di assestamento sia analogo il repentino intervento del Boost quando l’errore cambia segno determina la presenza di una ulteriore oscillazione nel transitorio.
3.7
Controllo adattivo
3.7.1 Generalità
Nel corso di questo lavoro alcuni passi sono stati fatti anche nell’ambito dei controlli adattivi al fine di valutarne le potenzialità per il controllo della servovalvola DDV.
Con il termine “controllo adattivo” ci si riferisce in generale ad sistema di controllo nel quale alcuni parametri del controllore vengono variati in base alla misura di opportune grandezze del sistema controllato.
Il tipo di controllo adattivo più semplice e che viene comunemente utilizzato in campo aeronautico è il Gain Scheduling: in questo tipo di controllo il guadagno del controllore viene variato utilizzando una funzione prestabilita (normalmente implementata nel sistema tramite una Look-Up-Table) di un parametro misurato del sistema controllato.
L’inserimento di un controllo con Gain Scheduling per la servovalvola DDV è stato valutato anche in questa sede, ma non ha portato a risultati soddisfacenti a causa della presenza della saturazione del comando, i cui effetti sono già stati ampiamente discussi.
Nel paragrafo 3.7.2 verrà brevemente illustrato il controllo adattivo denominato
Model Reference Adaptive Control (MRAC), il quale si è inizialmente rivelato
promettente nelle simulazioni effettuate con il modello semiempirico (al pari del controllo con Command Boost) per risolvere il problema della saturazione legata all’aumento degli attriti viscosi con la velocità dello spool.
Il problema più grande dei controlli adattivi è sicuramente dato dal fatto che non si riesce a garantire in ogni condizione la stabilità del sistema controllato: ciò è dovuto al fatto che in generale i parametri della legge di controllo dipendono non solo dal valore istantaneo dei parametri misurati, ma anche dalla loro storia temporale. Questo conduce ad una sostanziale incapacità di prevedere l’azione del controllo, del quale è invece nota solo la legge di variazione.
Questo problema incide poco nel caso di Gain Scheduling poiché la legge di controllo è prestabilita e di conseguenza l’azione del controllo dipende solo dal valore istantaneo delle grandezze misurate e dal comando (ci possono essere comunque problemi di instabilità legati alla velocità con la quale si varia il guadagno). Attualmente le norme per la certificazione dei sistemi in campo aeronautico sono tali da rendere il
Gain Scheduling l’unico tipo di controllo adattivo effettivamente certificabile.
In effetti la possibilità di instabilizzazione del sistemi di controllo adattivi è tutt’altro che remota: come verrà illustrato nel paragrafo 3.7.2 il controllo MRAC è stato abbandonato prima di effettuare prove sperimentali poiché già nella simulazione della risposta ad una storia di comando (effettuata con il modello semiempirico) il sistema è risultato instabile.
Bisogna tuttavia precisare che non è stata compiuta una estensiva serie di prove riguardo a come il sistema si comporta se si cambia l’entità dei pesi della funzione di controllo, ed un lavoro in tal senso potrebbe portare ad un controllo “più stabile”: sarebbe in ogni caso assai complicato dimostrare la stabilità del sistema in ogni possibile stato operativo.
3.7.2 Model Reference Adaptive Control (MRAC)
Il controllo MRAC è un particolare tipo di controllo “ad inseguimento di modello” o controllo “con modello di riferimento” (Model Reference Control, MRC).
Nei controlli MRC ed in particolare nel controllo MRAC una buona conoscenza del funzionamento del sistema controllato e dei requisiti prestazionali imposti consente di realizzare un modello di riferimento (Reference Model) che descrive le proprietà dinamiche desiderate per il sistema controllato in ciclo chiuso. L’obiettivo del controllo è quello di modificare la legge di controllo in modo da ottenere in ciclo chiuso le stesse proprietà dinamiche del modello di riferimento [5].
Perché ciò sia possibile si deve realizzare una legge di controllo (Control Law) che abbia una struttura opportuna, ed una logica di variazione dei parametri della legge di controllo detta legge adattiva (Adaptive Law). Lo struttura schematica del controllo MRAC è riportata in figura 3.45.
Figura 3.45 – Struttura di un controllo adattivo con modello di riferimento (MRAC)
Nel seguito ci si riferirà alla procedura che porta alla definizione del controllo per un sistema controllato la cui dinamica semplificata è assimilabile ad un secondo ordine, che rappresenta il caso di interesse per il controllo della servovalvola DDV.
La dinamica del sistema controllato (plant) può quindi essere descritta nel modo seguente:
u y y
y&&=−ϑp1&−ϑp0 +ϑpu (3.10)
Analoga sarà l’equazione relativa al modello di riferimento (Reference Model): r
y y
y&&m=−ϑm1&−ϑm0 +ϑmr (3.11)
La struttura della legge di controllo (Control Law) deve essere costruita in modo da poter fornire un comando in ingresso al sistema controllato che permetta di riprodurre la dinamica del modello di riferimento. Deve quindi fare in modo che sia verificata la condizione:
m
y
ovvero, svolgendo alcuni passaggi algebrici: r y y u pu mr pu m p pu m p ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ + − + − = 1 1 0 0 & (3.13)
La legge di controllo avrà dunque la forma seguente r y y
u=ϑc1&+ϑc0 +ϑcr (3.14)
nella qualeϑc1,ϑc0e ϑcrsono parametri incogniti. E’ opportuno notare che ponendo:
0 1= c ϑ , ϑcr =ϑc0 =K si avrebbe: ) (r y K u= −
ovvero un controllo di tipo proporzionale puro.
Come già detto si desidera che i parametri della legge di controllo siano tali da realizzare una dinamica di ciclo chiuso del sistema analoga a quella del modello di riferimento: un possibile criterio è quello di far variare tali parametri in modo da minimizzare l’errore quadratico medio tra l’uscita del sistema controllato e l’uscita del modello di riferimento (ovviamente stimolati dal medesimo ingresso, come appare chiaro in figura 3.45): ciò si può ottenere variando i parametri nel modo seguente:
[
ϑ&cr ϑ&c0 ϑ&c1]
=−Γ⋅grad(Jm) (3.15) dove: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = Γ 1 0 0 0 0 0 0 0 c c cr γ γ γ (3.16)è la matrice che definisce la velocità di variazione dei parametri nella direzione
) (Jm
grad ,
mentre Jm è l’errore quadratico medio definito come:
2 2 m m e J = (3.17) nel quale: m m y y e = − con y=y(ϑcr,ϑc0,ϑc1) (3.18)
Svolgendo alcuni passaggi analitici la (3.13) può essere scritta nel modo seguente: ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ∂ ∂ − ∂ ∂ − ∂ ∂ − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 0 0 1 0 c m c c m c cr m cr c c cr y e y e y e ϑ γ ϑ γ ϑ γ ϑ ϑ ϑ & & & (3.19)
nella quale però risultano incognite le derivate parziali dell’uscita rispetto ai parametri della legge di controllo.
Il problema è risolvibile ipotizzando che la dinamica di variazione dei parametri di controllo sia molto più lenta rispetto alla dinamica caratteristica del sistema: sotto questa condizione è possibile portare la derivata dell’uscita fatta rispetto ai parametri all’interno della derivata dell’uscita fatta rispetto al tempo. La (3.10) può essere quindi scritta in questo modo:
r y y dt d y y dt d y dt d pu cr c pu cr c pu cr p cr p cr ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ∂ + ∂ + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ + ∂ ∂ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ 0 1 0 1 2 2 (3.20)
Passando al dominio delle frequenze:
(
)
y(
)
r y s y s p pu c pu cr c pu p cr cr ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ⎟⎟⎠− + = ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − + − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ 0 0 1 1 2 (3.21) ovvero:(
1 1) (
1 1)
2 c pu p c pu p pu cr s s r y ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ = + − + − ∂ ∂ (3.22)Confrontando la (3.22) con la (3.13) si ricava infine: r F s s r y m m mr cr ⋅ = + + = ∂ ∂ 0 1 2 ϑ ϑ ϑ ϑ (3.23)
In modo del tutto analogo si dimostra che:
y F s s y y m m mr c ⋅ = + + = ∂ ∂ 0 1 2 0 ϑ ϑ ϑ ϑ (3.24) y F s s y y m m mr c & & = ⋅ + + = ∂ ∂ 0 1 2 1 ϑ ϑ ϑ ϑ (3.25)
Risulta in tal modo completamente definita la legge adattiva: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⋅ − ⋅ − ⋅ − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ y F e y F e r F e m c m c m cr c c cr & & & & 1 0 1 0 γ γ γ ϑ ϑ ϑ (3.26)
3.7.3 Implementazione del controllo MRAC in Matlab-Simulink
La figura 3.46 mostra come è stato implementato il controllo MRAC in Matlab-Simulink per effettuare le simulazioni della risposta dinamica della servovalvola.
La struttura in figura si deve immaginare inserita nel blocco “Controllore” del modello Matlab-Simulink relativo al funzionamento del sistema servovalvola (figura 3.23).
Si può notare che la velocità dello spool è stata ricavata derivando il segnale di posizione ed applicando un filtro per eliminare i disturbi di alta frequenza in modo del tutto analogo a quanto fatto per il controllo con Command Boost (paragrafo 3.6); è stata inoltre aggiunta la medesima rete ritardatrice-anticipatrice a valle del controllo in quanto si è notato che così facendo si ottengono notevoli miglioramenti nel comportamento in frequenza del sistema.
Parametro Valore Numerico
mr
ϑ Guadagno 6·104
0
m
ϑ Coefficiente del termine del primo ordine 6.83·104
1
m
ϑ Quadrato della pulsazione naturale 190
cr γ Coefficiente peso 200 0 c γ Coefficiente peso 1000 1 c γ Coefficiente peso 500
Figura 3.46 – Implementazione del controllo MRAC nel modello Matlab-Simulink della servovalvola DDV
La tabella 3.4 riporta i valori numerici assegnati ai parametri del modello di riferimento ed ai coefficienti peso della legge adattiva, mentre in figura 3.47 viene rappresentato il diagramma di Bode del modello di riferimento in relazione ai requisiti imposti.
3.7.4 Risultati delle simulazioni
Come è stato anticipato nel paragrafo 3.7.1 le simulazioni della risposta in frequenza effettuate tramite il modello semiempirico hanno messo in evidenza risultati promettenti (figura 3.48): in particolare si osserva come il controllo riesca a ridurre gli effetti dell’aumento degli attriti con la velocità dello spool (medi comandi - 20%) al pari della soluzione di controllo con Command Boost.
Per quanto riguarda i comandi di grande ampiezza anche il controllo MRAC, analogamente a tutte le altre tipologie di controllo illustrate in questo lavoro è soggetto all’indesiderata saturazione della tensione di comando al servo-amplificatore.
Figura 3.48 – Risposta in frequenza in ciclo chiuso della servovalvola DDV per diversi valori di ampiezza del comando in ingresso – Controllo di tipo MRAC.
La risposta (simulata) ad una storia temporale di comando, almeno per i valori dei coefficienti scelti per il controllo (tabella 3.4), evidenzia che già per comandi a gradino di media ampiezza il sistema non insegue efficacemente la posizione comandata, ma effettua oscillazioni di ampiezza elevata attorno a quest’ultima (figura 3.49).
Poiché il controllo MRAC si è rivelato sostanzialmente instabile già in fase di simulazione è stato deciso abbandonare questa soluzione e di non effettuare prove sperimentali che avrebbero potenzialmente potuto causare danni alla servovalvola.
Tuttavia, viste le premesse positive, un approfondimento degli aspetti teorici associati ai controlli adattivi ed ulteriori simulazioni da effettuarsi con il modello semiempirico (variando i coefficienti del controllo) potrebbero portare a migliori risultati.
Figura 3.49 – Simulazione della risposta temporale della servovalvola DDV ad una storia di comando simulata con il modello semiempirico – Controllo di tipo MRAC.