CAPITOLO 4: Il modello ADAMS per la
simulazione della frenata
4.1 IL CODICE ADAMS 4.1.1 Generalità
ADAMS (Automatic Dynamic Analysis of Mechanical Systems) è un codice di calcolo detto MSA (Multibody System Analisis) molto usato nell’industria per la creazione di modelli virtuali con cui effettuare simulazioni.
Questo programma è diviso in due ambienti principali: l’ambiente “View” e l’ambiente “Solver”.
Il primo è interattivo, consente cioè di eseguire e visualizzare sullo schermo, passo dopo passo, le operazioni di costruzione della geometria del modello che stiamo effettuando, gli steps della simulazione, gli output e, eventualmente fornisce messaggi sugli errori commessi, suggerendo possibili operazioni da compiere per risolverli.
Il secondo invece, “Solver”, rappresenta il “solutore” del sistema ed è accessibile o attraverso specifiche funzioni del “View”, o tramite il file di testo che descrive tutti i componenti del modello implementato.
4.1.2 Strumenti di ADAMS
Di seguito vengono descritti i principali strumenti, forniti da ADAMS, necessari alla costruzione di un modello.
A) PART E GEOMETRY
Le “geometry” sono corpi geometrici elementari (aste, cilindri, sfere, box, piastre….) le cui dimensioni possono essere definite dall’utente.
Una o più “geometry” possono costituire una “part”.
La “part” rappresenta un elemento del modello, per esempio il cilindro di un attuatore lineare o il pistone, tanto per citare “parts” molto semplici costituite da una o poche “geometry”, oppure il telaio di una bicicletta, o la fusoliera di un aereo per ricordare “parts” più complesse costituite da molte “geometry”.
Una “part” può essere rigida oppure elastica se importata da un programma di modellazione che usa gli elementi finiti come ad esempio ANSYS; esiste anche la possibilità di costruire semplici aste elastiche direttamente con ADAMS.
ADAMS calcola automaticamente le caratteristiche di massa e inerzia della “part” in base alla geometria e al materiale definiti dall’utente.
E’ inoltre possibile modificare manualmente le proprietà di massa e inerzia manualmente affinché rappresentino fedelmente le caratteristiche del pezzo reale a fronte di una rappresentazione grafica semplificata.
Una “part” sempre presente in ADAMS è il “ground”; esso è un oggetto privo di massa, di forma e di movimento che serve ad attribuire ai corpi che vi sono collegati un riferimento fisso nello spazio.
B) MARKER
E’ la rappresentazione di un punto che può appartenere ad una “part” o al “ground” e che definisce un sistema di riferimento locale. Il “marker” è caratterizzato dalla locazione e dall’orientamento degli assi. Questo elemento viene creato automaticamente da ADAMS ogni volta che si definisce una “geometry”, per riferire questa nello spazio, ma può essere anche creato dall’utente per specificare punti di applicazione delle forze, vincoli, posizioni di baricentri, etc.
C) CONSTRAINT
Essi sono i vincoli cinematici che permettono il moto relativo dei corpi che collegano. La libreria di ADAMS contiene i seguenti vincoli:
- “Motions” (attribuisce ad un grado di libertà un moto definito tramite accelerazioni, velocità, spostamenti);
D) FORCE
Una “force” applica un vettore forza o momento ad una “part”. In ADAMS esistono tre strumenti di tipo “force”:
- Forze applicate: “sforce” (forza a singolo componente), “vforce” (vettore di forze e momenti);
- Connettori flessibili: molle, “bushing”, smorzatori, etc..; - Forze speciali: gravità, forze aerodinamiche.
In particolare il “bushing” rappresenta elementi elastico-smorzanti, privi di massa e con caratteristiche di rigidezza e smorzamento lineari.
E) SPLINE
Una “spline” è una funzione continua che serve a interpolare una serie discreta di punti. Tale curva è il risultato di una interpolazione effettuata attraverso l’uso di una delle due funzioni seguenti:
- “akispl” sfrutta il metodo di interpolazione cubica di classe C1 di Akima che stima in modo corretto i valori della derivata prima della funzione quando c’è un’opportuna spaziatura tra i dati di input;
- “cubspl” interpola secondo un’approssimazione cubica di classe C2. Essa calcola in
modo corretto anche i valori della derivata seconda, senza vincoli sulla spaziatura dei punti della serie discreta da interpolare.
F) STATE VARIABLE
Essa è una funzione creata dall’utente attraverso il “function builder”, che è uno degli strumenti di ADAMS View, per definire una variabile della simulazione. E’ una funzione definita come “run time expression”, cioè come una relazione matematica dipendente dal tempo (F(time)) che viene stimata ad ogni step della simulazione e che ha una diretta influenza sul comportamento dinamico del modello (es. la st.var. “slittamento del pneumatico”, dalla quale dipendono le forze di attrito sui pneumatici, è funzione della velocità del mozzo della ruota e della velocità angolare della stessa, le quali cambiano ad ogni istante).
Il valore numerico di una “state variable” F ad un dato step può essere usato come valore di input per un’altra “state variable” G definita dall’utente e così via.
4.2 DESCRIZIONE DEL LAVORO SVOLTO 4.2.1 Fasi di lavoro
Il punto di riferimento per la costruzione del modello virtuale su ADAMS è il modello implementato sul simulatore Simulink ABS.
Come già detto, si tratta essenzialmente di un bimotore turboelica da trasporto passeggeri. Il velivolo originale adotta una configurazione ad ala alta con il carrello principale alloggiato in fusoliera.
Nel simulatore ABS erano state apportate alcune modifiche rispetto al velivolo reale, di cui la più visibile è sicuramente l’adozione di una diversa architettura dei carrelli di atterraggio.
Ovviamente, essendo lo scopo principale di questa tesi il confronto tra le simulazioni di ABS e quelle in ADAMS, è stata usata anche in ADAMS la semplice architettura del modello Simulink.
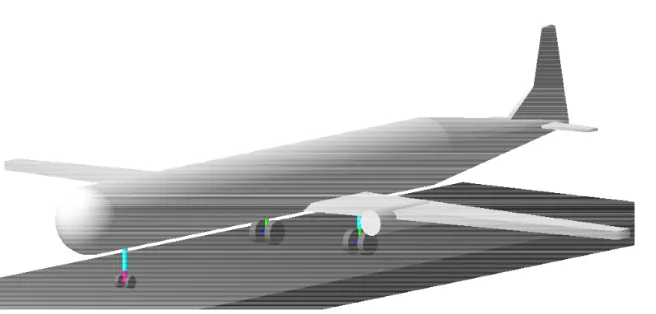
Al fine di ottenere una resa grafica migliore, il corpo principale dell’aereo, rappresentato da un’unica “part” chiamata “fusoliera” (ma che comprende anche ali, coda, motori) è stato trasformato da un velivolo ad ala alta in un velivolo ad ala bassa, che più si adatta alla conformazione lineare del carrello implementata.
Essendo però stati inseriti manualmente nelle caratteristiche della “part” i dati di input del modello di riferimento, massa, tensore di inerzia e posizione del baricentro, questa modifica strutturale non comporta alcun effetto nei risultati della simulazione essendo i due modelli perfettamente identici dal punto di vista dinamico e cinematico. In fig. 4.1 si schematizza l’intervento fatto.
Rimandando al seguente paragrafo la descrizione specifica delle singole “parts” e forze, è importante aggiungere che sono stati costruiti con ADAMS due modelli, aventi i pneumatici implementati con due concezioni completamente diverse:
Infatti in un primo caso si è deciso di utilizzare precisamente tutte le curve caratteristiche dei pneumatici del simulatore Simulink (vedi par. 4.3.2.3): questo è stato possibile solo rappresentando le ruote come “parts”, e inserendo manualmente tutte le forze e i momenti che caratterizzano la dinamica dei pneumatici. Si è così potuto per esempio usare una “spline” come curva della rigidezza verticale del pneumatico, un’altra per mettere in relazione la “state variable” “scorrimento”, costruita appositamente, con l’attrito di strisciamento del pneumatico.
Nel secondo caso si è usato il modello di pneumatico a coefficienti costanti preimpostato di tipo “FIALA”: per fare ciò è stato necessario stimare le varie costanti estrapolandole dalle curve specifiche. Per esempio per stimare la rigidezza verticale del pneumatico si è usato la curva presente in ABS Simulink “forza verticale vs schiacciamento” e si è calcolata la derivata nel punto in cui la forza è equivalente al peso sul pneumatico all’equilibrio statico. Questo modello di pneumatico approssimato ha offerto due vantaggi principali:
Si è rivelato di più semplice e veloce costruzione, ed è stato un punto di riferimento nella fase di “debugging” dell’altro modello di pneumatico.
Si sono quindi confrontati gli output dei due diversi modelli per vedere quanto fosse affidabile quello a coefficienti costanti.
4.2.2 Sistema di misure
Si è adottato il sistema di misure internazionale MKS (in metri, chilogrammi, secondi).
4.2.3 Sistema di riferimento
Il sistema di riferimento fisso (“global”) è un sistema di assi cartesiani X,Y,Z, avente l’asse X orientato lungo la pista e diretto in senso contrario al moto dell’aereo, l’asse Y verticale e diretto verso l’alto, l’asse Z orizzontale orientato perpendicolarmente alla pista. Ogni “marker” ha, poi, un suo sistema di assi cartesiani locali orientato secondo le direzioni principali della “part” cui appartiene.
4.3 IL MODELLO 4.3.1 Generalità
La geometria del mod ello è stata costruita interamente utilizzando i semplici corpi rigidi di forma elementare disponibili nel codice ADAMS, ai quali vengono attribuite come input esterni, le caratteristiche di massa e di inerzia.
Per la verità, se parliamo di aerei, è una notevole approssimazione usare esclusivamente corpi rigidi, soprattutto per quanto riguarda la fusoliera e le ali. In questo caso però il modello non ha come punto di riferimento l’aereo reale, bensì il simulatore Simulink ABS, il quale non tiene conto della flessibilità dei vari componenti del velivolo. L’unica eccezione riguarda la flessione del carrello sul piano longitudinale che è stata implementata per l’importanza che riveste in frenata e durante lo spin-up. Infatti, le oscillazioni flessionali del carrello determinano oscillazioni di velocità dei mozzi delle ruote e, quindi, incidono molto sulla dinamica dei pneumatici.
Questa funzione, però, non è stata implementata usando un corpo flessibile per costruire la gamba del carrello, ma è stata usata, similmente al simulatore Simulink, una forza di richiamo (cfr. §4.3.2.3 e fig. 4.7) lungo l’asse orizzontale, tra la “part” “mozzo dei pneumatici” e la “part” “stelo del carrello”.
Come già detto sono stati creati due modelli diversi per il modo con cui sono stati fatti i pneumatici:
un modello (che sarà chiamato “modello A”) è caratterizzato da pneumatici costituiti da una “part” formata di semplici “geometries”, cui sono state applicate manualmente tutte le forze e i momenti della loro dinamica, usando tutte le curve delle caratteristiche fisiche presenti nel simulatore Simulink; l’altro modello (che sarà chiamato modello B) presenta, invece, pneumatici preimpostati di tipo FIALA.
4.3.2 Il modello A
Il modello A è quello che è stato creato con tutte le caratteristiche fisiche identiche a quelle presenti nel simulatore ABS. E’ quello che, quindi, è destinato ad essere direttamente confrontato con i risultati similari ottenuti con il codice simulink.
Il modello è stato suddiviso nelle seguenti “parts”: 1) Fusoliera
2) Cilindro dell’ammortizzatore anteriore 3) Stelo dell’ammortizzatore anteriore 4) Mozzo del carrello anteriore
5) Pneumatici anteriori
6) Cilindro dell’ammortizzatore destro 7) Stelo dell’ammortizzatore destro 8) Mozzo del carrello principale destro 9) Pneumatici del carrello principale destro 10) Cilindro dell’ammortizzatore sinistro 11) Stelo dell’ammortizzatore sinistro 12) Mozzo del carrello sinistro
13) Pneumatici del carrello principale sinistro 14) Pista
Fig. 4.2 Modello A 4.3.2.1 La “part” “Pista”
La “part” “pista” è stata creata per avere un riferimento fisso visibile. Sarebbe stato concettualmente identico creare dei “markers” sulla “part” “ground” (che è di fatto ubiqua e invisibile) e usare questi come punti di riferimento per la costruzione delle varie forze e dei vari vincoli. La “pista”, rendendo visibile il livello del suolo, ha facilitato la costruzione di tutto il modello e ha permesso una resa grafica notevolmente migliore.
4.3.2.2 La “part” “Fusoliera”
La fig. 4.3 mostra la “part” “Fusoliera”.
Fig. 4.3 Fusoliera
Essa è il corpo rigido più complesso del modello essendo costituito da varie “geometries” per conferirgli un’estetica convincente. Fanno parte della “part” anche le ali, i motori e la coda.
In questa “part” sono stati inseriti manualmente la massa, il tensore di inerzia e la posizione del baricentro dell’intero modello del simulatore Simulink, non essendo disponibili i parziali.
Nel baricentro della fusoliera sono stati applicati i vettori di forze e momenti aerodinamici.
4.3.2.3 La geometria dei carrelli
I carrelli sono gli elementi più importanti del modello in quanto attraverso di essi si trasmettono tutte le forze che interessano la dinamica del velivolo a terra.
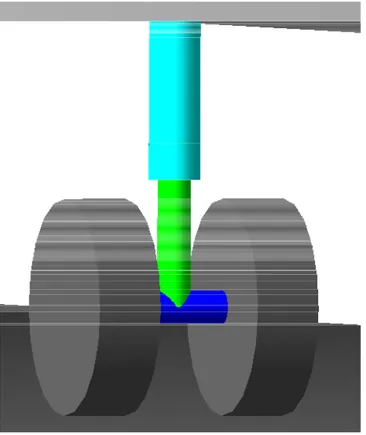
In Fig. 4.4 si mostra uno dei carrelli principali. La sua architettura è identica a quella del carrello anteriore, fatta eccezione per le dimensioni.
Fig. 4.4 Il carrello
Il carrello è formato da quattro “parts”:
- il “Cilindro” è la parte superiore, vincolata con un incastro rigido alla fusoliera; - lo “Stelo” è la parte inferiore ed è vincolata al cilindro tramite una coppia prismatica; - l’”Hub”, cioè il mozzo delle ruote, è collegato allo stelo tramite una coppia prismatica
che gli permette una traslazione relativa allo stelo lungo l’asse parallelo al moto; questo per simulare la flessione del carrello;
- i “Pneumatici” sono costituiti da un'unica “part” che comprende entrambe le ruote ed è collegata al mozzo con una cerniera piana.
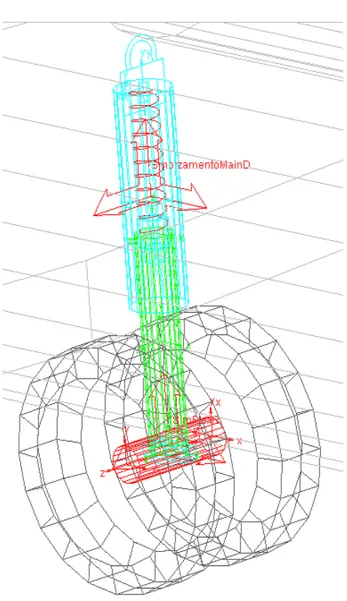
Fig. 4.5 Vista wireframe del carrello completo
Nella Fig. 4.5 viene mostrata una vista in “wireframe” del carrello in cui sono visibili l’ammortizzatore e i vincoli utilizzati.
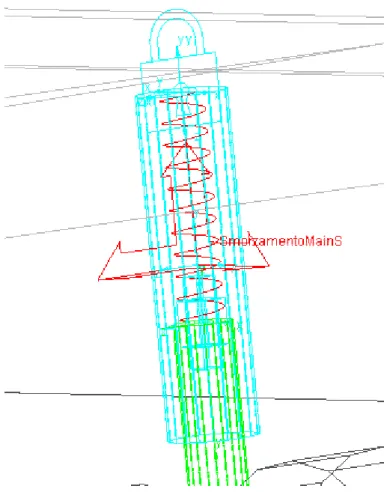
Fig. 4.6 L’ammortizzatore
L’ammortizzatore (Fig. 4.6) è stato modellato usando uno “spring-damper” (molla-smorzatore predefinito) tra il cilindro e lo stelo per la sola forza elastica. Lo smorzamento è stato implementato con una “Vforce” (sempre tra cilindro e stelo) perché la curva di smorzamento è diversa a seconda che l’ammortizzatore sia in allungamento o in accorciamento. Non è stato possibile utilizzare più semplicemente una “spline” tridimensionale, interna al modello dello “spring-damper”, per definire il coefficiente di smorzamento funzione della deformazione e della velocità. Infatti questa funzione presenta una discontinuità nel passaggio tra valori positivi e negativi della velocità di deformazione.
Fig. 4.7 Particolare del carrello che evidenzia come sia stata implementata la flessione
La figura Fig. 4.7 mostra come è stata implementata la flessione del carrello: le ”parts” “mozzo” e “stelo” sono vincolate tra loro tramite una coppia prismatica che permette al mozzo di avere un moto relativo allo stelo, rettilineo, diretto lungo l’asse longitudinale. E’ stata applicata una forza tra le “parts” “mozzo” e “stelo” diretta lungo l’asse
longitudinale e avente l’espressione (2.8):
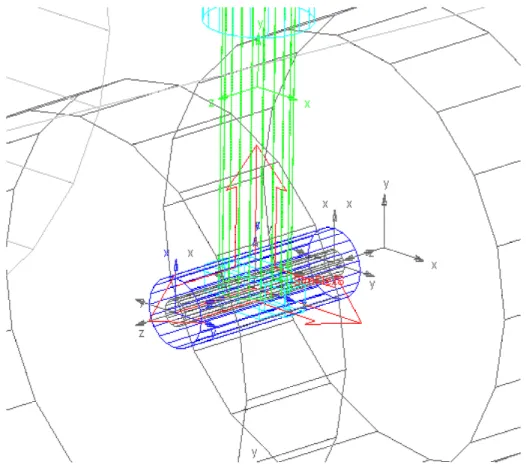
Fig. 4.8 Pneumatici e relative forze
La figura Fig. 4.8 mostra il vincolo di cerniera piana che unisce la “part” “pneumatici” alla “part” “hub”, e che consente la rotazione delle ruote attorno al loro asse Z, e il sistema di forze e momenti che sono stati utilizzati per simulare la dinamica del pneumatico.
Si elencano di seguito in dettaglio le fasi del lavoro svolto per l’implementazione del modello del pneumatico (in questo caso la coppia di pneumatici del carrello principale destro):
- Inizialmente si sono create le “parts” e i vincoli come in Fig. 4.8.
- Si è costruito un “marker” al livello del suolo (visibile grigio in basso nella Fig. 4.8), “ContattoMainD”, che servirà da punto di riferimento per calcolare lo schiacciamento del pneumatico.
dr Y hubD.cm YContattoMainDY ContattoMainDY ContattoMainD (4.1)
- Si è definita la “state variable” “SLIPD”, “scorrimento”, nella stessa forma che troviamo nel simulatore Simulink (cfr. par 2.2.5 formula 2.11):
Sx VxhubD.cm ω pneumaticiMD R pneumaticiMD
. VxhubD.cm ω pneumaticiMD ω pneumaticiMD 4.2 ( )
- Si è posta una “Vforce” ad agire tra le “parts” “hub” e “ground”, la cui componente y rappresenta le forze elastiche e di smorzamento dovute allo schiacciamento del pneumatico, mentre la componente x le forze di attrito.
Fy f drfff( ) (4.3)
la funzione che lega la Fy allo schiacciamento del pneumatico è una “spline” costruita con i dati
presi dal codice ABS (vedi A-1.1 e Fig. A-1.1).
Fx Fy µ SLIPD. ( ) SLIPD SLIPD . Fy Fy (4.4)
la funzione che lega il coefficiente di attrito µ allo scorrimento SLIPD è anch’essa una curva ripresa dai dati di ABS (vedi A-1.1 e Fig. A-1.2).
Per la componente dell’attrito è stato necessario differenziare il segno a seconda che la variabile
di stato “SLIPD” fosse positiva o negativa.
- Si è poi applicato alla part “pneumatici” un vettore di momenti la cui unica componente non nulla è quella Z, asse coincidente con l’asse di rotazione delle ruote: Il momento è la somma della coppia di resistenza al rotolamento e della forza di attrito moltiplicata per il braccio.
Mz Fy Xroll. Fy.µ SLIPD( ) SLIPD SLIPD
. .R pneumaticiMD
Fy
Fy (4.5)
La seguente tabella riassume i vincoli e le forze usati nel modello.
CORPO 1 CORPO 2 VINCOLO FORZA (TIPO/
Effetto) FUSOLIERA GROUND VFORCE
Forze aerodinamiche FUSOLIERA CILINDRO DEL
CARRELLO (*3) INCASTRO RIGIDO (*3) CILINDRO DEL CARRELLO (*3) STELO DEL CARRELLO (*3) COPPIA PRISMATICA (*3) SPRING DAMPER Molla ammortizzatore VFORCE Smorzamento ammort. STELO DEL CARRELLO (*3) MOZZO RUOTE (*3) COPPIA PRISMATICA (*3) VFORCE Flessione carrello MOZZO RUOTE (*3) PISTA VFORCE
Forza elastica, attrito PNEUMATICI (*3) MOZZO RUOTE
(*3)
CERNIERA PIANA
PNEUMATICI (*3) PISTA VMOMENT
Momenti sulle ruote
Tab. 4.1 Vincoli e forze Modello A
4.3.3 Il modello B
La seguente fig. 4.9 mostra il modello B.
L’uso del pneumatico predefinito “FIALA” ha comportato una modifica a tutta la struttura del carrello, e inoltre ha eliminato la necessità della “part” “pista”, poiché nella creazione del pneumatico viene definita, tramite un file di dati esterno, e quindi visualizzata, anche la pista.
Le “parts” che compongono il modello sono: 1) Fusoliera
2) Cilindro dell’ammortizzatore anteriore 3) Stelo dell’ammortizzatore anteriore 4) Mozzo del carrello anteriore
5) Cilindro dell’ammortizzatore destro 6) Stello dell’ammortizzatore destro 7) Mozzo del carrello destro
8) Cilindro dell’ammortizzatore sinistro 9) Stelo dell’ammortizzatore sinistro 10) Mozzo del carrello sinistro
I pneumatici, due per carrello non sono delle “parts” ma fanno parte delle forze di contatto, così come la pista.
Fig. 4.9 Modello B
In seguito sono discusse in dettaglio le sole modifiche apportate al carrello rispetto al Modello A, essendo tutto il reso identico.
4.3.3.1 Il carrello
Fig. 4.10 Il carrello del modello B
Il carrello ha ovviamente mantenuto la stessa architettura e le stesse dimensioni del Modello A, come si vede dalla Fig. 4.10; sono rimaste invariate le “parts” “Cilindro”, “stelo” e “hub”, così come i vincoli tra essi, lo “spring damper” la forza di smorzamento e la forza di flessione del carrello. È stato eliminato il vettore delle forze di attrito ed
elastiche dei pneumatici applicato nell’altro modello all’”hub”, ed anche il vettore di momenti applicato alla “part” “pneumatici” che adesso non esiste più. Al suo posto abbiamo due distinti pneumatici di tipo FIALA. Il pneumatico FIALA non è una vera e propria “part”, ed è stato costruito seguendo uno schema predefinito, inserendo in una finestra di ADAMS “View” apposita gli input richiesti (Fig. A-4.1 in appendice A-4)) e scrivendo due files di testo esterni, uno riguardante il pneumatico (Tire Property File, appendice A-4) e uno riguardante la pista (Road Data File, appendice A-4).
Non si devono applicare manualmente le forze di contatto e di attrito dei pneumatici perché le loro espressioni sono già contenute nel modello FIALA.
I pneumatici sono vincolati al mozzo tramite un “revolute joint”, generato automaticamente nella costruzione del pneumatico.
E’ anche possibile creare manualmente altri tipi di vincoli, per poter, per esempio, rendere solidali a delle “parts” i pneumatici. Questo è l’unico sistema possibile per poter far agire delle forze o dei momenti esterni sul pneumatico: le forze si fanno agire sulle “parts” cui sono solidali i pneumatici.
Nella Tab. 4.2 sono riassunti i vincoli e le forze usate in questo modello.
CORPO 1 CORPO 2 VINCOLO FORZA (TIPO/
Effetto)
FUSOLIERA GROUND VFORCE
Forze aerodinamiche FUSOLIERA CILINDRO DEL
CARRELLO (*3) INCASTRO RIGIDO (*3) CILINDRO DEL CARRELLO (*3) STELO DEL CARRELLO (*3) COPPIA PRISMATICA (*3) SPRING DAMPER Molla ammortizzatore VFORCE Smorzamento ammort. STELO DEL CARRELLO (*3) MOZZO RUOTE (*3) COPPIA PRISMATICA (*3) VFORCE Flessione carrello MOZZO CARRELLO ANTERIORE PNEUMATICO FIALA ANT. (*2) CERNIERA PIANA (*2) (propria del FIALA) MOZZO CARRELLO PRINCIPALE (*2) PNEUMATICO FIALA PRINC. (*4) CERNIERA PIANA (*2) (propria del FIALA)
Tab 4.2 Vincoli e forze modello B