Capitolo 3
Validazione dei modelli
Lo scopo del presente lavoro di tesi è la validazione delle predizioni degli strain sui femori umani nella regione del collo.
Questo studio di validazione combinato numerico – sperimentale, prevede appunto un confronto tra gli strain predetti dai modelli e quelli misurati da estensimetri posti sulla superficie di un set di femori di cadavere.
Il termine validazione sta ad indicare il processo con cui si va a verificare che i modelli numerici predicano accuratamente il fenomeno fisico che è stato progettato di replicare.
Un modello viene validato andando a verificare la sua accuratezza, ossia l’accuratezza con cui riesce a predire la realtà.
La validazione sperimentale è senza dubbio il migliore strumento possibile per verificare l'accuratezza complessiva delle predizioni di un modello agli elementi finiti.
Purtroppo solo un limitato numero di studi sono disponibili in letteratura a riguardo e la maggior parte di questi manca della necessaria generalità per poter essere applicati in altri modelli.
3.1 Fase sperimentale
Nei paragrafi successivi verranno riportate le procedure e le metodologie utilizzate nel laboratorio di Tecnologia Medica presso gli Istituti Ortopedici Rizzoli seguendo un protocollo sperimentale consolidato.
L’attenzione verrà posta sulle due configurazioni di prova messe a punto, Single leg stance e Sidefall, per le prove meccaniche, sia durante i test in campo elastico che a rottura.
In un secondo momento verrà affrontato l’iter seguito per la validazione dei modelli FEM, grazie alle fasi di digitalizzazione e registrazione, finalizzate all’ottenimento di una replica dello studio sperimentale con i modelli numerici.
Verrà trattata la validazione delle deformazioni predette mediante il modello e quelle sperimentali con la discussione delle problematiche connesse.
3.1.1 Il campione di prova
Il campione di prova era costituito da 11 femori di cadavere umano. Questi sono stati congelati subito dopo l’espianto a -25°C e preservati avvolti in un panno imbevuto di soluzione fisiologica durante tutti i test sperimentali.
Nella prima fase dello studio ogni femore, dopo essere stato scongelato e immerso in acqua al fine di prevenire artefatti derivanti da indurimento del fascio (beam-hardening), dovuti alla presenza di interfacce ad alta variazione del coefficiente di attenuazione (ad es osso-aria), ha subito una scansione CT (con uno scanner HiSpeed, General Electric Co., USA).
Per la scansione è stato adottato un protocollo di scansione assiale (Tabella 3.1): lo spessore delle slice è stato di 1 mm e la spaziatura di 2 mm nella regione prossimale, dall'apice della testa del femore fino al piccolo trocantere, e 4 mm nel resto del femore.
La spaziatura delle slice è stata mantenuta a 4 mm nella regione condilare dal momento che una fine descrizione del femore distale non era necessaria ai nostri scopi.
La dimensione del pixel è di 0,46 mm e i parametri fisici dello scanner sono stati 180mA per la corrente di tubo e 120 kVp per la tensione di picco, tipici valori per le indagini cliniche.
Tabella 3.1: Protocollo di scansione assiale
Avendo gli studi di validazione l’obiettivo finale dell’applicazione in vivo, nel laboratorio di Tecnologia Medica presso gli Istituti Ortopedici Rizzoli è stato deciso di adottare un protocollo di scansione sviluppato per scansioni cliniche in vivo. Tale protocollo ottimizza il processo mettendo a punto al tempo stesso una massimizzazione della qualità della ricostruzione 3D del femore ed una minimizzazione della dose per il paziente.
Figura 3.1: Immagini raffiguranti varie viste del data-set CT: Orthoslice a sinistra e RXCT a destra
Poiché la regione di interesse dello studio è limitata alla porzione prossimale del femore, dopo una preliminare pulizia e tracciatura dei piani di riferimento, che ha consentito un allineamento riproducibile durante le prove osservando un protocollo validato (Luca Cristofolini, Juszczyk, Martelli, Taddei, & Viceconti, 2007), ogni femore è stato sezionato distalmente lungo il piano trasversale della diafisi a circa 2/3 della sua lunghezza biomeccanica (lunghezza che va dalla superficie laterale del collo del femore fino all’estremità inferiore della fossa intercondiloidea) e inserito in blocchi di polimetilmetacrilato (in forma abbreviata PMMA) che hanno permesso di mantenere la configurazione imposta durante le prove.
In seguito i campioni di prova sono stati opportunamente strumentati mediante l’applicazione di estensimetri e sottoposti alle prove in campo elastico e a rottura.
Nei seguenti paragrafi sono descritte in dettaglio le fasi di preparazione dei segmenti ossei e i set-up sperimentali utilizzati.
3.1.2 Misura delle deformazioni superficiali
Le deformazioni superficiali dei campioni di prova sono state misurate mediante estensimetri: strumenti utilizzati per misurare lo stato di deformazione di materiali soggetti a sollecitazioni meccaniche.
Essi sono costituiti da un sottile filo metallico di diametro che va dagli 0.015 agli 0.03 mm, disposto a zigzag e incollato su un supporto. Gli estremi del filo sono saldati a conduttori isolati.
L’estensimetro viene solitamente incollato sulla superficie del pezzo in prova in modo tale che la direzione di misura sia concorde alla direzione dell’oggetto lungo la quale si presuppone subisca la massima deformazione.
Il filo si allunga insieme alla superficie dell’oggetto in esame, la sua resistenza ohmica cambia ed è registrata dando una misura della deformazione: la variazione relativa della resistenza ohmica R/R è proporzionale al suo allungamento, R/R = o * , dove o è un coefficiente di misura che varia tra 2-3.5, quantità adimensionale dipendente dalle proprietà fisiche del materiale.
Nell’analisi dello stato di sforzo negli elementi di una struttura complessa è spesso necessario determinare non soltanto la grandezza, ma anche la direzione degli sforzi principali. In questo caso è di uso comune il montaggio simultaneo di tre estensimetri in direzioni che formano angoli di 45° (rosetta di estensimetri, utilizzata anche in questo lavoro di tesi, Figura 3.2). Dai tre allungamenti misurati possono essere facilmente determinati gli sforzi principali e la posizione degli assi principali.
Figura 3.2: Struttura di un estensimetro triassiale con griglie a 45°
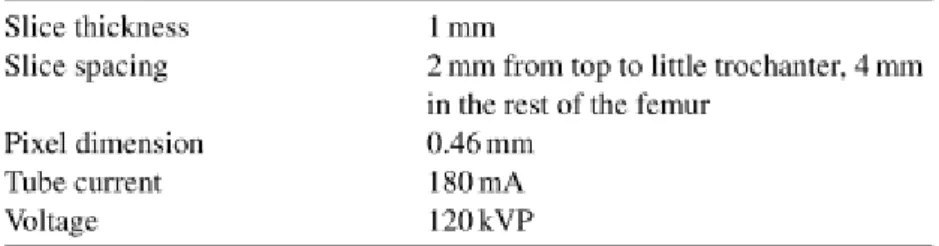
I femori in esame in questo lavoro di tesi sono stati dunque strumentati con rosette di estensimetri. Gli strain gauges sono stati disposti sui quattro lati anatomici (mediale, laterale, anteriore, posteriore), applicandoli su quattro livelli o porzioni anatomiche precedentemente tracciate (testa femorale, collo, metafisi, diafisi), per un totale di 16 estensimetri su ogni femore (unica eccezione è stata fatta per il provino #2510 per il quale la presenza della linea aspra molto pronunciata ha comportato l’esclusione dell’estensimetro posteriore sul livello 3).
Sedici sono stati dunque i punti marcati e selezionati per le misure di strain sul femore (Figura 3.3): -Quattro intorno al collo, vicino al bordo della cartilagine articolare della testa sui lati anteriore, laterale, posteriore, mediale (liv. H).
-Quattro intorno al collo, posti distalmente rispetto ai precedenti sui lati anteriore, laterale, posteriore, mediale (liv. N).
-Quattro intorno alla diafisi prossimale appena sotto il piccolo trocantere sui lati anteriore, laterale, posteriore, mediale (liv. 1).
Figura 3.3: Disegno di un campione di femore sul quale sono illustrate le posizioni degli estensimetri
L'area per la misurazione degli strain è stata preparata utilizzando la seguente procedura validata e adeguata per test su campioni umidi di cadavere (L Cristofolini, Juszczyk, Taddei, & Viceconti, 2009):
1. La superficie è stata pulita completamente da tessuti molli mediante utilizzo del bisturi e alla fine con la carta vetrata.
2. Attenta pulitura e sgrassaggio prima con etanolo, quindi con una miscela di acetone e 2-propanolo (RMS1, HBM, Darmstadt, Germany).
3. Riempimento dei pori e impermeabilizzazione della superficie con due strati di poliuretano protettivo (PU 120, HBM, Darmstadt, Germany).
4. Rimozione dell'eccesso di poliuretano con carta vetrata fine per uniformare la superifice. 5. Incollaggio degli strain gauges con colla a base di cianoacrilato (CC-33A, Kyowa, Tokyo,
Japan) allineando l’asse della grigia a 0° con il tratto ortogonale al livello segnato sul femore in una prima fase di messa a punto sperimentale.
Sono state usate rosette triassiali di estensimetri precablate e impilate operanti su un raggio di 3 mm. Queste sono costituite da tre griglie resistive sovrapposte a 0°, 45° e 90°, come si può vedere nella Figura 3.4, con resistenza pari a 350 Ω, che consentono di misurare le deformazioni principali e l’angolo in cui si presentano (la resistenza e l'isolamento di ogni griglia è stata testata con un tester per strain gauge).
Sui livelli 1 e 3 sono stati applicati estensimetri water-proof modello KFW-2-350-D17-23L2M2S (Kyowa, Tokyo, Japan), mentre sui livelli H e N sono stati applicati estensimetri non water-proof modello C2A-06-031WW-350 (Vishay, Shelton, United States).
Per ottenere un’ottimale protezione e impermeabilizzazione, e quindi un completo isolamento elettrico, su questo ultimo tipo di estensimetri, non water-proof, sono stati applicati 3 strati di poliuretano protettivo (PU 120, HBM, Darmstadt, Germany): una sottile pellicola circoscritta sufficiente a racchiudere completamente al suo interno gli estensimetri sul livello H e N per evitare l’infiltrazione dell’acqua all’interno delle griglie durante le operazioni di idratazione.
Gli estensimetri sono stati campionati a 2000 Hz (System-6000, Vishay Micro-Measurement, Raleigh, USA) e i cavi sono stati quindi collegati al sistema di acquisizione.
Analisi degli strain
Le rosette estensimetriche usate negli esperimenti di validazione forniscono i valori di due deformazioni principali e le direzioni principali mediate sull’area sensibile dell’estensimetro. Gli strain rilevati hanno come unità di misura il : i valori positivi indicanti misure di tensione, mentre i valori negativi di compressione.
Gli angoli che gli estensimetri hanno riportato indicano la differenza tra la direzione della prima griglia della rosetta triassiale, allineata con gli assi del femore (l’asse della diafisi, o l’asse del collo del femore), e la direzione della deformazione principale, di trazione (1), rilevata.
I valori di massimo e minimo strain principale sono stati dunque raccolti da 16 rosette per ogni scenario di carico per il maggiore carico applicato, al fine di confrontarli con i risultati delle simulazioni agli elementi finiti.
Complessivamente 16 misurazioni per ogni caso di carico sono state utilizzate per la validazione dei modelli numerici.
3.1.3 Dispositivi di vincolo Struttura distale
La messa a punto della struttura distale del provino è stata la medesima sia per il set-up delle prove in Single leg stance, sia per quelle in Sidefall.
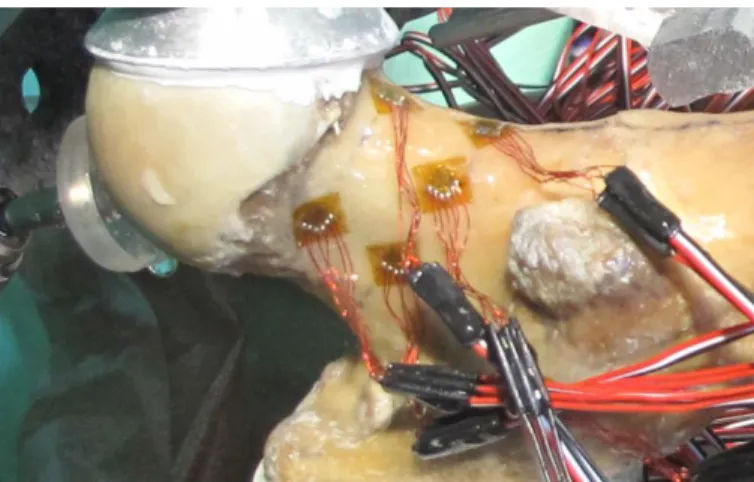
Il pot metallico distale, contenitore del campione di prova, è approssimabile ad una scatola a base quadrata aperta sul lato superiore. Esso è costituito da una base ottagonale forata su quattro lati sulla quale sono fissate centralmente quattro pareti laterali avvitate l’una sull’atra (Figura 3.5).
Le viti sulle pareti hanno la possibilità di essere allentate in modo da permettere l’inserimento del componente di cemento distale solidale al femore, ed essere stretto in modo da ottenere un leggerissim forzamento che lo blocchi all’interno del pot.
Figura 3.5: Particolare che mostra il pot metallico del femore in configurazione di prova
Il componente di cemento distale è stato realizzato mantenendo l’osso in posizione verticale e inserendo la parte distale dello stesso all’interno del pot metallico.
È stato colato il PMMA (polimetilmetacrilato) (1RXT, Restray, Lodi, Italia) in modo da riempire il volume interno del pot metallico. Il PMMA è un polimero poco tossico, di facile utilizzo e reperibilità.
Una volta completato il processo di polimerizzazione l’osso è risultato fissato al cemento ed è stato possibile bloccarlo per pressione all’interno del pot metallico.
Coppe per la testa del femore e il grande trocantere (solo per i test in Sidefall)
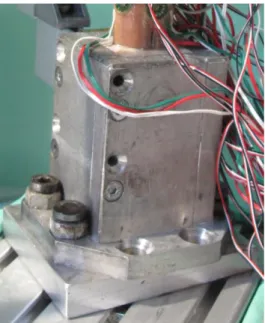
Per evitare fenomeni di indentazione che avrebbero portato la testa del femore e il gran trocantere a danneggiarsi (a causa del sottilissimo strato di osso corticale che caratterizza tali zone) prima di effettuare le prove di simulazione nella configurazione di caduta laterale, i campioni di prova sono stati opportunamente dotati di coppe di alluminio di protezione (Figura 3.6).
Per ogni femore sono state realizzate al tornio due coppe in alluminio aventi geometria semisferica e spessore costante (2 mm): una per il grande trocantere, applicata con cemento osseo (PMMA), è stata appoggiata su una superficie piana supportata da due cuscini lineari ortogonali che hanno eliminato ogni componente di forza orizzontale; una per la testa del femore, applicata anch’essa con cemento osseo, sulla quale ha agito il carico dall’attuatore della macchina di prova mediante un sistema di cuscinetti lineari che hanno eliminato ogni componente di forza orizzontale.
Figura 3.6: Immagine raffigurante l’applicazione delle coppe di alluminio sulla testa del femore e sul grande trocantere mediante l’interposizione di uno strato di cemento (PMMA)
3.1.4 Macchina di prova
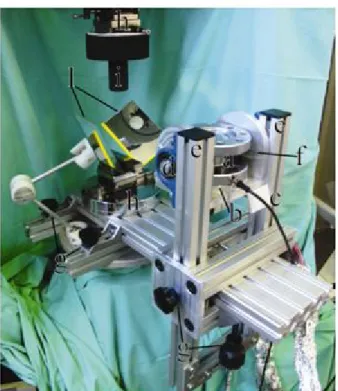
Per i test sperimentali è stata usata una macchina di prova servo idraulica uniassiale (8502, Instron Ltd., Canton, MA, USA) (Figura 3.7) dotata di cella di carico con fondo scala da 5 kN.
La struttura portante è costituita da un basamento sul quale sono vincolate due colonne che sorreggono una traversa. Il carico viene applicato attraverso un attuatore, in questo caso lo stelo di un cilindro idraulico. Tale cilindro è montato appunto sulla traversa, che ne permette il posizionamento in altezza.
Il controllo della macchina è ottenuto attraverso un sistema elettromeccanico collegato ad un computer. La retroazione sul sistema di controllo può avvenire sia in base alla posizione dell’attuatore, che al carico applicato.
Figura 3.7: Macchina di prova Instron 8502. a) cella di carico, b) basamento, c) colonne, d) traversa, e) cilindro idraulico, f) attuatore
3.1.5 Configurazioni di carico
La parte prossimale dei femori in esame è stata sottoposta a prove meccaniche utilizzando due configurazioni di carico: la prima in configurazione Single leg stance per simulare la forza di reazione nell’articolazione di anca che agisce sulla testa del femore durante compiti motori quotidiani; la seconda invece in configurazione Sidefall per simulare le forze dovute ad un impatto laterale sul grande trocantere e la conseguente reazione vincolare nell’articolazione di anca agente sulla testa del femore in seguito ad un evento accidentale come una caduta.
Prima di effettuare le prove a rottura nella configurazione di carico di caduta laterale, sono stati condotti alcuni test non distruttivi in campo elastico, in entrambe le configurazioni di carico, finalizzati alla determinazione del comportamento strutturale e degli strain superficiali dei femori sotto un set di condizioni di carico prestabilito.
Le condizioni di carico per le prove non distruttive fanno riferimento a procedure già utilizzate presso il laboratorio di Tecnologia Medica (Fulvia Taddei, Cristofolini, Martelli, Gill, & Viceconti, 2006)(Grassi et al., 2011).
3.1.5.1 Prove in campo elastico
Le prove condotte in campo elastico, sia per quanto riguarda la configurazione di Single leg stance, sia per quella di Sidefall, sono state effettuate in controllo di spostamento, imponendo cioè un’escursione dell’attuatore ad una determinata velocità. Tali valori sono stati definiti appositamente per ogni configurazione.
Noto che l’osso si rompe a 7000 – 10000 με (Bayraktar et al., 2004), è stato imposto uno spostamento tale da causare una deformazione non superiore al 10% di tale valore.
Per ottenere ciò è stata effettuata una procedura preliminare, consolidata internamente al laboratorio sperimentale di Tecnologia Medica, chiamata tuning. L’operatore impone uno spostamento dell’attuatore in controllo manuale, mentre legge le deformazioni misurate dagli estensimetri. Si ottiene così il valore di spostamento dell’attuatore che induce una deformazione massima di 1000 με su uno degli estensimetri applicati.
Forze non distruttive sono state quindi applicate sulla testa femorale tramite la macchina di prova: ogni run è consistito nell’applicare al provino una rampa trapezoidale di spostamento con le seguenti caratteristiche:
• Carico dal valore iniziale di riferimento al valore di spostamento deciso con il tuning. • Mantenimento di tale valore per 0.2 secondi.
• Rampa di scarico fino al valore iniziale di riferimento.
La rampa di carico è stata impostata in modo tale che lo strain e lo strain rate nelle regioni più stressate non superassero 1000 e 0.005 s-1 rispettivamente. Questo ha portato ad una velocità dell’attuatore di 1.7 – 5.5 mm/s che è rimasta invariata sia durante la rampa di salita che di discesa. In questo modo si è stati certi di caricare il provino mantenendosi in campo elastico senza rischiare di danneggiarlo.
Per ogni configurazione di carico sono state effettuate sei ripetizioni di prova, con 3 minuti di recupero tra una ripetizione e l'altra per permettere al femore di recuperare.
Per poter poi confrontare le deformazioni principali si è provveduto a farne la media su tutte le ripetizioni di prova, dopodiché le deformazioni principali sono state normalizzate al peso corporeo del donatore al decesso.
Single leg stance
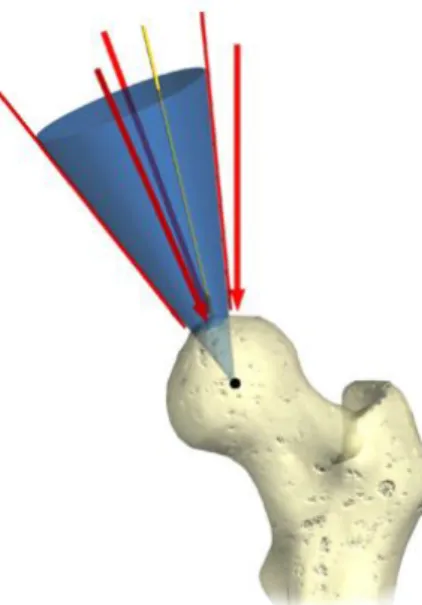
Dalla consultazione della letteratura scientifica e in particolare dal lavoro (Bergmann et al., 2001) è stato possibile estrapolare informazioni relativamente al carico meccanico e alla funzionalità del giunto dell’anca e del femore prossimale, grazie a impianti d’anca strumentati con trasmissione telemetrica dei dati.
In tale lavoro sono stati riportate le osservazioni sui vettori delle forze di contatto nei piani frontale e trasversale del femore prossimale, verificando che le direzioni sono risultate essere molto simili durante tutte le attività con piccole variazioni. Tramite queste informazioni hanno ricostruito il cono delle direzioni delle forze che agiscono sul collo del femore durante le varie attività quotidiane. Anche nel presente lavoro di tesi, piuttosto che replicare specifici task motori, è stato deciso di applicare la forza di giunto risultante alle direzioni estreme di un cono analogo a quello di (Bergmann et al., 2001) attraversato dalle reazioni articolari dell’anca per un ampio range di task motori (Enrico Schileo, Taddei, Malandrino, Cristofolini, & Viceconti, 2007).
Le varie configurazioni sono state messe a punto al fine di generare flessione in vari piani con carichi assiali e torsionali, e coprire il range fisiologico massimo degli angoli di reazione dell'anca durante una serie di attività (come camminate a varie velocità, posizione su una sola gamba, salire e scendere le scale, alzarsi da seduto ed altri task).
Le configurazioni di carico utilizzate per le prove hanno dunque portato alla determinazione delle direzioni della forza schematizzate in modo tale che non corrispondano a nessun particolare movimento anatomico, ma che rispecchino le direzioni estreme di tale cono sui piani frontale e sagittale (Cristofolini et al, 2007).
Figura 3.8: Visualizzazione del cono comprensivo delle reazioni vincolari agenti sulla testa del femore durante vari task motori
Ad esse sono state aggiunte due ulteriori configurazioni che corrispondono a quella più ricorrente in letteratura (3° nel piano frontale) e a quella più critica per l’insorgenza di fratture spontanee (8° nel piano frontale).
Sono state dunque eseguite le seguenti configurazioni di prova:
1. Neutro: asse femorale verticale (0° adduzione, 0° flessione). 2. Massima adduzione: asse femorale fortemente addotto (24° adduzione, 0° flessione).
2. Media adduzione: asse femorale mediamente addotto (8° adduzione, 0° flessione). 3. Minima adduzione: asse femorale leggermente addotto (3° adduzione, 0° flessione). 4. Massima flessione: asse femorale flesso (0° adduzione, 18° flessione). 5. Massima estensione: asse femorale leggermente esteso (0° adduzione, 3° estensione). Sono stati messi a punto una serie di cunei di diverse inclinazioni (0°, 3°, 8°, 18° e 24°) da fissare sopra la cella di carico. Alla sommità del cuneo scelto per la prova è stato bloccato il pot metallico contenente il provino, orientato quindi nella configurazione voluta.
Inoltre sull’attuatore è stata fissata una piattaforma dotata di slitte lineari sulla quale era libero di scorrere sul piano orizzontale, ad attrito molto basso, un piccolo parallelepipedo di granito che messo in contatto con la testa del femore garantiva condizioni di isostaticità.
Sidefall
Nel tentativo di simulare un impatto laterale studi precedenti hanno applicato un carico verticale sul gran trocantere, mantenendo l’appoggio sulla testa, e costringendo il femore a rimanere ruotato di un angolo corrispondente a 10° di adduzione e 15° di intrarotazione (configurazione relativa ad un caso tipico preso in esame).
Ciononostante non sembra esistere in letteratura una procedura comune che faccia da riferimento in modo univoco. È stata presa quindi la decisione di mantenere valida la configurazione usata negli altri studi estendendo il range degli angoli presi in considerazione. Allinearsi con i lavori presenti in letteratura può dare la possibilità di confrontare i risultati ottenuti col presente lavoro.
Il set-up messo a punto in questo studio per la simulazione della caduta laterale, ha previsto un ribaltamento della posizione del femore rispetto agli studi precedenti, ciò è stato fatto affinché la regione mediale del collo fosse meglio visibile.
I punti di contatto con l’attuatore e con il piano di appoggio sono stati pertanto imposti rispettivamente sulla testa del femore e sul grande trocantere.
Poichè vi è un’elevata incertezza sull’elevata possibilità di configurazioni di caduta sono stati condotti alcuni test non distruttivi in campo elastico in un set di configurazioni di carico al fine di coprire il cono di forze considerato ammissibile per le cadute laterali.
In questo modo è stato possibile raccogliere informazioni su una larga varietà di orientazioni che potrebbero essere rappresentative per almeno tre tipi di cadute (antero - laterale, laterale, postero - laterale).
Il set-up sperimentale messo a punto ha permesso dunque di testare il singolo femore in 12 configurazioni, combinazioni di 3 valori di angoli di intrarotazione (0°, 15°, 30°) e 4 valori per gli angoli di adduzione (0°, 10°, 20°, 30°) (Tabella 3.2).
Tabella 3.2: Configurazioni di prova adottate per il Sidefall
Figura 3.9: Immagine che riporta in alto a sinistra una rappresentazione dell’angolo di intrarotazione, in basso a destra una rappresentazione dell’angolo di adduzione
Per quanto riguarda i vincoli, al fine di ottenere una configurazione staticamente determinata che permettesse una corretta determinazione delle forze di vincolo ai giunti, il femore è stato bloccato distalmente e reso libero di ruotare sia nel piano verticale sia rispetto all’asse del femore,
Sono state poste delle coppe di alluminio di supporto sul grande trocantere e sulla testa femorale al fine di proteggerli rispetto a eccessive deformazioni locali o schiacciamenti.
Ogni femore è stato quindi vincolato distalmente mediante il pot metallico solidale ad una cerniera che ha permesso inclinazioni (di adduzione) in un piano quasi-frontale.
Al fine di evitare vincoli indesiderati il femore è stato lasciato libero di effettuare piccole fluttuazioni dell’angolo di adduzione in un piano quasi-frontale grazie ad un cuscinetto. Tutte le altre rotazioni e traslazioni dell’estremità distale sono state impedite.
Figura 3.10: Immagine del setup sperimentale in vitro di un femore sinistro visto posteriormente
Il pot metallico distale è stato fissato su una cella di carico torsionale tramite bulloni passanti dalla base forata.
Sull’altro lato della cella è stata alloggiata una flangia scanalata con albero concentrico sulla quale si è potuto leggere direttamente l’entità dell’angolo di intrarotazione regolato mediante una scala graduata e bloccato con una morsa (Figura 3.11 a sinistra).
La flangia, la cella torsionale e il pot sono stati posti tutti all’interno di un profilato a C avente sulla base un afferraggio regolabile contenente l’albero concentrico.
I lati del profilato a C sono stati arrotondati e scanalati per poter velocizzare la lettura dell’angolo di adduzione (Figura 3.11 a destra); il movimento di adduzione è stato reso possibile grazie alla cerniera realizzata mediante due cuscinetti assiali ciascuno montato su un supporto verticale mobile.
Figura 3.11: A sinistra è mostrato il dettaglio dell’afferraggio regolabile, la freccia invece indica dove leggere l’angolo di intrarotazione. A destra è raffigurato il profilato a C e la freccia mostra dove leggere l’angolo di adduzione
I supporti verticali sono stati resi regolabili in altezza e in profondità grazie ad un sistema composto da quattro profilati in alluminio disposti in direzione ortogonale rispetto ai supporti e al basamento: ciò ha garantito maggiore rigidezza all’intero set-up.
Tale meccanismo è dotato sui lati di due manopole che hanno consentito il bloccaggio rapido dei supporti verticali una volta che il provino è stato disposto nella configurazione desiderata (figura 3.12).
verticali.
Infine all’estremità dell’attuatore e sul basamento sono stati installati due apparati composti da guide lineari ortogonali tra loro che consentissero la possibilità di far traslare i punti di contatto rispettivamente sulla testa e sul gran trocantere per garantire condizioni di isostaticità (eliminando l’applicazione di componenti di forze orizzontali indesiderate).
Su un lato del pot è stato sistemato un sistema di sostegno per due trasduttori di spostamento (LVDT, GHSA750-500, Macro Sensors, USA) disposti a 90° fra loro che raggiungono il contatto sulla testa del femore in posizione cranio-caudale e antero-posteriore e misurano la deflessione della testa femorale nelle due direzioni durante le prove.
3.1.5.2 Prove a rottura
Le prove a rottura sono state effettuate nella configurazione di caduta laterale scegliendo le configurazioni di carico più critiche per ogni provino in seguito all’analisi di massima delle deformazioni subite durante le prove in campo elastico.
All’attuatore è stato imposta una rincorsa in modo che i provini non fossero minimamente precaricati prima dell’impatto e un escursione aleatoria sufficientemente grande da garantire la rottura (Tabella 3.3).
Le velocità sono state maggiorate di un ordine di grandezza rispetto a quelle usate in campo elastico. Il carico è stato applicato ad un costante rate di spostamento che è risultato in una rottura dell’osso entro 1 s. Il rate di carico è un valore fondamentale che deve essere quanto più vicino possibile al valore in vivo poiché la velocità di impatto influenza le fratture meccaniche.
Carichi e spostamenti sono stati registrati dalla macchina di prova (8502, Instron, Canton, MA, USA) a 1000 Hz.
.
Tabella 3.3: Tabella che riporta i parametri impostati per le prove a rottura
La messa a punto del set-up sperimentale per le prove di rottura ha previsto l’inserimento di alcuni elementi rispetto alle prove in campo elastico in configurazione Sidefall.
Figura 3.12: Set-up sperimentale per le prove di rottura in configurazione Sidefall. a) cella di carico torsionale, b) flangia, c) specchio per la lettura dell’angolo di intrarotazione, d) cuscinetto assiale, e) supporti verticali, f) profilato a C, g) manopole per il bloccaggio rapido, h) guide lineari, i) attuatore, l) specchi per avere più viste del provino durante i test sperimentali
Sono stati aggiunti due specchi per avere allo stesso tempo la visualizzazione delle porzioni antero-mediali e postero-antero-mediali del collo.
La cella di carico della macchina è stata sostituita con una avente fondo scala 100kN per avere la possibilità di misurare il carico ultimo a rottura.
Inoltre per osservare la zona di insorgenza della frattura durante il test distruttivo, è stata utilizzata una sorgente di luce ed una videocamera ad alta velocità (FastCam-X1024PCI, Photron, UK) operante a 3000-9000 frames/s (il frame rate effettivo è dipeso dalle dimensioni del campo di vista ritagliato per ogni campione) (Figura 3.13).
La telecamera ha ripreso con una risoluzione spaziale media di 0.2mm x 0.2mm la porzione supero - laterale del collo e, contemporaneamente ma indirettamente mediante i due specchi posti ai lati del set-up, le aree antero - mediale e postero - mediale (Enrico Schileo, Taddei, Cristofolini, & Viceconti, 2008).
Figura 3.13: Set-up sperimentale utilizzato per le prove a rottura del femore prossimale in vitro. A sinistra una visione complessiva del set-up di prova dove è visibile la telecamera ad alta velocità sulla sinistra (puntata direttamente sulla porzione supero-laterale del femore), insieme con la sorgente di luce (Luca Cristofolini et al., 2007); il campione è sotto la macchina di prova come è possibile vedere nell’immagine di destra.
Figura 3.14: Femore intatto montato sulla macchina di prova in configurazione di carico Sidefall; i due specchi sono visibili vicino al femore, orientati al fine di riflettere i lati antero - mediale e postero - mediale.
3.2
Validazione del modello FEM:
Ai fini di una corretta validazione con i dati sperimentali, è necessario che gli scenari di carico computazionale e sperimentale si corrispondano perfettamente, in modo da poter confrontare il campo tensionale e deformativo.
In questo studio grazie ad un processo di digitalizzazione dei punti salienti dei provini, seguito da una registrazione sui corrispondenti modelli FEM, è stato possibile confrontare i risultati numerici con quelli sperimentali.
3.2.1 Digitalizzazione e registrazione
All’interno della procedura di modellazione subject-specific proposta, un passo fondamentale è stato quello di allineare la posizione spaziale del femore di cadavere reale, posto nel sistema di riferimento del laboratorio, rispetto al sistema di riferimento del modello FEM, e quindi dei dati CT. Questo è stato fatto al fine registrare nella posizione corretta il modello completo su cui mappare le proprietà materiali col programma Bonemat, che utilizza in ingresso per la mappatura il campo spaziale dei dati HU e il modello FEM costruito, ma soprattutto per la necessità di un modello di replicazione preciso della posizione di alcune caratteristiche sperimentali (estensimetri, livello del cemento, posizione di pot, ecc) in modo da poter applicare correttamente le posizioni al contorno e pianificare dei post-processing (processo di trattamento dei dati in uscita dall’analisi FEM) significativi.
Infatti la validazione del modello, che avviene mediante confronto con dati sperimentali, necessita di una corrispondenza precisa tra i punti notevoli individuati sperimentalmente (mediante il processo di digitalizzazione) e quelli riportati nel modello FEM, punti che, con la discretizzazione, sono rappresentati da nodi di applicazione dei carichi e dei vincoli, e nodi corrispondenti alle aree ricoperte dagli estensimetri.
Queste esigenze sono state soddisfatte mediante una digitalizzazione del femore e di altri punti chiave, seguita da una procedura di registrazione spaziale.
Il processo di digitalizzazione è avvenuto mediante l’utilizzo di un digitiser (Faro GAGE, Faro Technologies, Inc., USA), un misuratore digitale di coordinate per contatto avente una risoluzione di 0.02 mm, che ha permesso l’acquisizione di punti salienti sulla superficie dei campioni di prova sperimentali.
Il Faro GAGE è un braccio robotico dotato di encoder ad ogni suo giunto che permette l’esplorazione di un volume di lavoro di 1,2 mc (Figura 3.15).
Il dispositivo possiede un software dedicato con una intuitiva interfaccia utente ed è in grado di generare reportistica relativa alle coordinate dei vari punti acquisiti.
Figura 3.15: Immagine di un digitiser Faro GAGE utilizzato per la digitalizzazione dei provini
Nello specifico sono state acquisite varie cloud di punti: una omogenea sulla superficie del femore, il livello del cemento vincolante intorno alla diafisi, vari punti sulle facce esterne dei componenti metallici utilizzati nel set-up sperimentale, ma soprattutto la posizione dei centri dei 16 estensimetri, per i quali sono state eseguite tre misure ripetute per ogni punto scelto.
La successiva fase di registrazione spaziale tra i punti acquisiti sul provino sperimentale e quelli del modello, ha permesso di eseguire la trasformazione dei punti relativi al sistema di riferimento del laboratorio su quelli solidali al sistema di riferimento della CT.
Il primo passo ha previsto la disposizione di una nuvola di punti proveniente da digitalizzazione del femore in laboratorio sulle superfici dei modelli di femore.
Per compiere tale registrazione rigida è stato usato un algoritmo Iterative Closest Point il quale è servito ad eseguire la registrazione delle nuvole di punti acquisite sulle superfici tassellate estratte dall’esame CT trovando quindi la trasformazione tra il sistema di riferimento del laboratorio e quello del modello. Questa registrazione spaziale è avvenuta mediante la minimizzazione di una “funzione costo” (dove il “costo” è riferito alle distanze dei punti digitalizzati dalla superficie derivante dalla CT). Tale procedura è naturalmente affetta da errori, derivanti dalla risoluzione dello strumento, dalle irregolarità superficiali presenti in corrispondenza dei punti digitalizzati e dall’algoritmo utilizzato per compiere la registrazione rigida.
Il secondo passo è costituito da una procedura di registrazione “punto a punto” delle varie cloud, rese solidali ai vari componenti metallici, nella quale i punti acquisiti con il digitiser hanno subito una registrazione rigida su quelli relativi sistema di riferimento della CT, permettendo una sovrapposizione del modello sul volume CT.
Figura 3.16: Immagine relativa al processo di registrazione rigida effettuato sul software Builder
3.2.2 Replica delle configurazioni di carico
Per poter confrontare i risultati ottenuti sperimentalmente, sono stati replicati i casi di carico delle due configurazioni di prova testate in vitro.
Sono state effettuate simulazioni utilizzando il solutore Ansys (software v. 12.1, Ansys Inc., USA), indispensabile anche per le analisi dei risultati.
Prove in campo elastico
Per quanto riguarda le prove in campo elastico sono stati presi i modelli FEM registrati e sono stati simulati applicando carichi non distruttivi equivalenti a quelli applicati nelle prove sperimentali nelle configurazioni di carico corrispondenti.
Le configurazioni realizzate e le condizioni al contorno assegnate rappresentano un accettabile compromesso tra realismo della simulazione e semplicità di realizzazione, sia sperimentale che computazionale.
In entrambe le simulazioni il femore è stato modellato in Ansys come elemento solid187: tale elemento è caratterizzato da una mesh tetraedrica a 10 nodi che aumenta la precisione delle simulazioni, ma non consente l'applicazione di vincoli rotazionali.
Sono stati creati i vari componenti ai quali sono stati assegnati i materiali riportati nella Tabella 3.4 definendo le loro proprietà come isotropiche elastiche lineari.
È stato assegnato un modulo di Poisson pari a 0.3.
Tabella 3.4: Caratteristiche dei materiali utilizzati nelle simulazioni
Single leg stance
Per quanto riguarda le simulazioni in Single leg stance sono state effettuate le seguenti operazioni. Sono state ricreate le condizioni sperimentali di vincolo prima di tutto applicando un incastro su tutti i nodi posti sulla superficie inferiore del componente del pot metallico distale.
Le varie configurazioni di carico sono state poi replicate andando ad inclinare il vettore del carico agente sulla testa del femore dell’angolo relativo alla configurazione in esame.
È stato inoltre calcolato il nodo della testa del femore in corrispondenza di ogni punto di applicazione del carico nelle varie configurazioni di prova.
In questo modo sono state simulate le configurazioni spaziali andando a coprire vari angoli compresi del cono ideale considerato nel quale le direzioni estreme hanno coperto un range di 24° e 21° nei piani frontale e sagittale, rispettivamente.
Figura 3.17: Schematizzazione della replica del caso di carico in configurazione Single leg stance
Sidefall
Per simulare la condizione di impatto sul femore, in seguito ad una caduta laterale, si è scelto di modellare i vari componenti nel modo seguente.
Per replicare le condizioni sperimentali di vincolo la porzione distale del femore è stata vincolata con una cerniera in modo tale da consentire rotazioni del femore nel piano frontale. La cerniera è stata ottenuta modellando il pot metallico distale (Figura 3.18), solidale al femore, utilizzando elementi tetraedrici solid72 caratterizzati dall’avere 4 nodi con gradi di libertà (degree of freedom, DOF) rotazionali.
Tale scelta comporta una perdita di precisione nella simulazione in una zona di minor interesse come quella distale, in compenso dà la possibilità di poter modellare vincoli rotazionali.
I nodi posizionati sugli assi delle cerniere sono stati lasciati liberi di ruotare al fine di simulare rotazioni di adduzione / abduzione e, nello specifico, ricreare i quattro angoli di adduzione utilizzati per i casi di carico. Gli altri DOF sono stati vincolati (Grassi et al., 2011).
Le configurazioni delle tre intrarotazioni sono state riprodotte generando rotazioni assiali del modello.
Relativamente al vincolo sul trocantere, è stata scelta la soluzione di applicare un “carrello bidimensionale” senza frizione (selezionando il nodo posto più in basso della coppa di protezione posta sul grande trocantere lungo gli assi di carico) al fine di ricreare il punto di appoggio, non soggetto a forze orizzontali, del grande trocantere.
Il carico verticale è stato invece applicato sulla coppa di protezione della testa del femore, sul nodo posto più in alto rispetto all’asse di carico.
Le configurazioni spaziali simulate variano da 0° a 30° per quanto riguarda l'angolo tra diafisi e piano orizzontale e da 0° a 30° per quanto riguarda gli angoli di intrarotazione.
Prove a rottura
Per poter confrontare i risultati delle prove a rottura eseguite in fase sperimentale nella configurazione di carico di caduta laterale, sono state replicate le condizioni di vincolo di tale configurazione nel modello ed è stato scelto un criterio di rottura basato sul massimo strain principale includendo un’asimmetria nei valori di strain elastico limite in trazione e compressione. È stato applicato un criterio di frattura asimmetrico tra trazione e compressione nel quale i valori massimi degli strain principali adottati derivano dai valori medi riportati nel lavoro (Bayraktar et al., 2004) che ha posto particolare attenzione allo studio delle proprietà di snervamento a livello di tessuto sia per l’osso corticale che trabecolare (Tabella 3.5).
Tabella 3.5: Dettagli del criterio di rottura implementato basato sul massimo strain principale con i valori limite asimmetrici derivanti da (Bayraktar et al., 2004)
Questo criterio ha previsto il calcolo del rischio di frattura (RF) nodale come rapporto tra lo strain nodale e lo strain limite, considerando che la frattura avvenga una volta che almeno un singolo nodo sulla superficie dell’osso abbia raggiunto un RF > 1 (Malandrino et al., 2008).
Questo nodo indica la porzione dell’epifisi femorale dove viene predetta l’insorgenza della frattura. Il carico corrispondente a tale evento, rappresenta il carico di rottura predetto secondo il criterio del rischio di frattura basato sullo strain massimo.
In fase di validazione del criterio, il carico di rottura ricavato tramite l’applicazione del criterio di frattura è stato confrontato con quello registrato nel test sperimentale (Enrico Schileo et al., 2008). Questo criterio è in grado innanzitutto di garantire la riproduzione del massimo comportamento elastico limite osservato sperimentalmente per l’osso, oltreché essere facile e automatico da implementare in modelli FE subject-specific automatizzati derivanti da dati CT.
L’elevata accuratezza nella predizione degli strain che questi modelli possono garantire permette di andare a studiare le condizioni limite dell’osso e dare valore alla formulazione di un criterio di frattura per il tessuto osseo determinato dai valori limite di snervamento basati sugli strain.
Può essere pertanto definito uno strumento efficace per la valutazione del rischio di frattura in vivo delle ossa lunghe.
3.2.3 Confronto con le misure sperimentali
Le rosette utilizzate nel set-up sperimentale hanno fornito valori per i due strain principali sulla superficie dell’osso. Il terzo strain principale corrisponde alla deformazione perpendicolare alla superficie dell’osso.
Nei modelli FEM è stato supposto uno stato di tensione piana, in questo modo è stato possibile comparare le due deformazioni principali predette con quelle misurate sperimentalmente.
La condizione di tensione piana, o plane stress, prevede che la direzione normale al piano mediano sia la direzione trasversale lungo la quale è orientato l’asse z, mentre gli assi x e y si inseriscono nelle direzioni parallele al piano mediano, formando un sistema destrorso di coordinate cartesiane rettangolari.
Figura 3.19: Rappresentazione dello stato di plan stress
Un piano caricato nel suo piano mediano è definito essere in uno stato di plane stress se possono essere assunte le seguenti ipotesi:
Tutti i carichi applicati nel piano agiscono nelle direzioni parallele al piano mediano e sono simmetriche rispetto al piano mediano stesso.
Tutte le condizioni di vincolo sono simmetriche rispetto al piano mediano.
Spostamenti, deformazioni e tensioni nel piano possono essere considerate uniformi lungo lo spessore.
Le componenti di tensione normale e di taglio in direzione z sono nulle o trascurabili.
Lo spessore deve essere di piccole dimensioni, in genere 10% o meno, rispetto alle dimensioni nel piano.
I piani sono trasversalmente omogenei.
Per materiali isotropi i problemi di plane stress e plane strain possono essere mappati l’uno nell’altro mediante la relativa legge costitutiva.
Poiché sotto un determinato campo di tensioni, in un materiale disomogeneo il valore di deformazione superficiale misurato è fortemente influenzato dal modulo elastico del materiale immediatamente sottostante l’estensimetro, nelle epifisi, dove un sottile strato superficiale di osso compatto ricopre un certo volume di osso spugnoso, le misure di deformazione risultano essere notevolmente condizionate da questa disomogeneità localizzata.
A tal fine durante la generazione della mesh è stata posta molta attenzione per assicurare la coincidenza di ogni nodo del modello FEM con il centro di ciascuna rosetta relativa.
Ogni nodo è stato quindi piazzato al centro del relativo estensimetro identificato mediante la procedura di registrazione spaziale.
Figura 3.20: Particolare del modello di un femore nella sua porzione prossimale dove sono mostrati gli elementi adiacenti ai nodi corrispondenti agli estensimetri registrati
Gli strain principali, predetti da ogni modello FE, sono stati dunque calcolati ai nodi superficiali corrispondenti all’area sensibile di ogni strain gauge.
Questo è stato fatto poichè essendo la maggior parte degli estensimetri posizionati nelle regioni di maggiore gradiente di deformazione, per confrontare correttamente le deformazioni predette con quelle misurate, le deformazioni principali predette sui nodi corrispondenti all’area dell’estensimetro sono state mediate in un raggio di 3 mm dal nodo di riferimento centrale (supposto corrispondente al centro della rosetta) mediando i risultati nodali (semplicemente sommando i vari valori delle deformazioni principali e dividendo il risultato per il corrispondente numero di nodi).
Queste sono state successivamente comparate con gli strain misurati sperimentalmente.
Per quantificare l’accuratezza della predizione globale le deformazioni principali predette da ogni modello sono state comparate con i valori misurati in due modi: un’analisi di regressione lineare, dove la “bontà” della predizione è espressa dal coefficiente di regressione lineare R2, e dalla pendenza e intercetta della retta di regressione.
Idealmente una perfetta corrispondenza lineare è rappresentata da un coefficiente R2=1 con pendenza unitaria e intercetta nulla.
Queste misure statistiche forniscono un’indicazione globale della capacità predittiva del modello ma è anche importante conoscere l’errore locale che si potrebbe avere in ogni singola predizione. A tal fine per ogni modello è stato computato l’errore massimo (tramite il calcolo dell’errore di picco) e l’errore medio, calcolato come errore quadratico medio (o RMSE) (Fulvia Taddei et al., 2006). L’errore quadratico medio è stato poi diviso per la misura sperimentale maggiore e definito adimensionalmente come RMSE%.