h
Gabriele Giannelli
CONTROLLO COMBINATO
DI
BRUSHLESS AD ALTA COPPIA
Tesi di Laurea Magistrale
Universit´a di Pisa
Novembre 2013
UNIVERSIT ´
A DI PISA
Facolt´a di Ingegneria
Corso di Laurea Magistrale in INGEGNERIA ELETTRICA
CONTROLLO COMBINATO
DI
BRUSHLESS AD ALTA COPPIA
h
h
Tesi di
Gabriele Giannelli
h
Relatori
Ing. Luca Sani . . . .
Candidato
Dott.Gabriele Giannelli . . . .
Sessione di Laurea 25 Novembre 2013 Anno Accademico 2013/2014
Un ringraziamento al Dipartimento di Ingegneria dell’Energia, dei Sistemi, del Territorio e delle Costruzioni per i preziosi insegnamenti. Ringrazio sentitamente l’Ing. Luca Sani per il supporto e la fiducia riposta in me. Inoltre desidero ringraziare tutti coloro che mi sono stati vicino durante questi anni, in particolare i miei genitori e mio fratello Federico.
Sommario
La progettazione di un sistema di controllo combinato per una coppia di macchine brushless, in grado di garantire il sincronismo di posizione, riguarda la comprensione ed il gover-no di aspetti elettrici, meccanici ed informatici.
L’architettura prevede un DTC at-tuato con inverter trifase SVM. Il metodo per la sintesi dei regolatori inizia dal progetto analitico e si con-clude con le simulazioni che finaliz-zano i controllori, passando per l’a-nalisi continua e digitale. I risulta-ti sulla dinamica del sistema si ot-tengono utilizzando il pacchetto Ma-tlab�Simulink.
I prodotti presenti sul mercato, op-portunamente configurati seguendo le indicazioni del progetto, sono in gra-do di realizzare l’obiettivo di que-sto elaborato. A questo proposi-to ´e stata individuata una soluzio-ne pre-ingegsoluzio-nerizzata da ABB ed una personalizzata, sviluppata dall’autore in ambiente Real-Time Workshop di Matlab�.
Abstract
The combined control project of two high torque brushless machi-ne, which provides position syncro-nism, requires an integrated approa-ch among eletrical, meapproa-chanical and computer science features.
The control tuning process starts wi-th analytic analysis and ends wiwi-th si-mulations which define it, by going through a continuous and digital pro-cess.
The first step concerns a conti-nuous analysis, whereas the second one is discrete, dynamic results are achieved by simulations on Ma-tlab�Simulink.
On the market there are products which can reach the goal of this issue only if opportunely set up with pro-ject features.
On this way it was searched a standard solution on ABB portfo-lio and a custum solution, whi-ch the the author developed on Matlab�Real-Time Workshop.
Indice
1 Introduzione 1
1.1 Motivazioni . . . 2
1.2 Obiettivi della tesi . . . 2
1.3 Organizzazione dei capitoli . . . 2
2 Alimentazione dell’azionamento 5 2.1 Introduzione . . . 5
2.2 Tecniche di commutazione . . . 8
2.2.1 Space Vector Modulation . . . 8
3 Modello del motore sincrono a magneti permanenti 13 3.1 Introduzione . . . 13
3.2 Ipotesi generali . . . 13
3.3 Rotore . . . 14
3.4 Modello matematico . . . 16
3.4.1 Analisi dell’induttanze principali . . . 17
3.4.2 Equilibrio elettromagnetico . . . 19
3.4.3 Calcolo coppia elettromagnetica . . . 20
4 Meccanica 23 4.1 Stress meccanici . . . 23
4.2 Calcolo momento d’inerzia . . . 26
5 Controllo dell’azionamento 29 5.1 Introduzione . . . 29
5.2 Architettura di controllo . . . 29
5.2.1 Sistemi in catena aperta . . . 29
5.2.2 Sistemi in retroazione . . . 30
5.3 Strategia di controllo . . . 30
5.3.1 Controllo scalare . . . 32
5.3.2 Controllo vettoriale . . . 32
5.4 Controllo del complesso . . . 36
5.5 Conclusioni . . . 37 ix
INDICE
6 DTC-SVM 39
6.1 Introduzione . . . 39
6.2 Sintesi delle funzioni di trasferimento . . . 41
6.2.1 Funzione di trasferimento flusso-tensione . . . 41
6.2.2 Funzione di trasferimento tensione-coppia . . . 41
6.2.3 Funzione di trasferimento coppia-velocit´a . . . 46
6.2.4 Funzione di trasferimento velocit´a - posizione . . . 47
6.3 Definizione delle specifiche dei regolatori . . . 47
6.3.1 Anello di flusso . . . 48
6.3.2 Anello di coppia . . . 48
6.3.3 Anello di velocit´a . . . 49
6.3.4 Anello di posizione . . . 49
6.4 Progetto del sistema di controllo . . . 50
6.4.1 Anello di flusso . . . 51
6.4.2 Anello di coppia . . . 55
6.4.3 Anello di velocit´a . . . 62
6.4.4 Anello di posizione . . . 69
6.5 Descrizione dei modelli utilizzati . . . 71
6.5.1 Introduzione . . . 71
6.5.2 Generatore di riferimenti . . . 72
6.5.3 Regolatore di flusso . . . 73
6.5.4 Alimentazione . . . 74
6.5.5 Macchina sincrona a magneti permanenti (PMSM) . . 75
6.5.6 Modello PMSM . . . 77 6.5.7 Disturbo Tr . . . 77 6.5.8 powergui . . . 78 6.6 Simulazioni . . . 79 6.6.1 Anello di flusso . . . 80 6.6.2 Anello di coppia . . . 82 6.6.3 Anello di velocit´a . . . 89 6.6.4 Anello di posizione . . . 96
6.7 Valutazione del ripple di coppia . . . 100
6.8 Robustezza . . . 103
6.9 Sintesi dei risultati . . . 105
6.9.1 Regolatori . . . 105
6.10 Scelta del tempo di campionamento . . . 106
6.10.1 Hardware . . . 106
6.10.2 Ripple . . . 106
6.11 Simulazioni con inverter SVM . . . 107
6.12 Sommario . . . 107 x
INDICE 7 Controllo combinato 113 7.1 Introduzione . . . 113 7.2 Architettura di controllo . . . 113 7.3 Simulazioni . . . 113 8 Soluzione standard 123 8.1 Introduzione . . . 123 8.2 Criteri di scelta . . . 123
8.3 Individuazione del prodotto . . . 123
9 Soluzione custom 127 9.1 Introduzione . . . 127 9.2 DSP . . . 127 9.2.1 Cosa ´e? . . . 127 9.2.2 Cenni Storici . . . 128 9.2.3 Scelta del DSP . . . 128 9.2.4 Specifiche tecniche . . . 129 9.2.5 Moduli e sottomoduli . . . 131 9.3 Strumenti utilizzati . . . 138
9.3.1 Ambiente Real-Time Workshop . . . 140
9.4 Sviluppo del firmware . . . 141
9.4.1 Quadro comandi . . . 142 9.4.2 Controllo . . . 145 9.4.3 Inverter e PMSM . . . 151 9.4.4 Tipi di dati . . . 154 9.5 Risultati ottenuti . . . 154 9.5.1 Simulazioni . . . 156 9.5.2 Ripple . . . 157 9.5.3 Conclusioni . . . 157 10 Conclusioni 163 11 Appendice A1 165 11.1 Teoria dei vettori spaziali . . . 165
12 Appendice A2 167 12.1 Dati del motore nelle condizioni operative scelte . . . 167
13 Appendice A3 169 13.1 Implementazione Simulink dell’inverter SVM . . . 169
13.1.1 Discrete SVPWM Generator . . . 170
13.1.2 Inverter . . . 176
13.2 Test effettuati . . . 176 xi
INDICE
14 Bibliografia 179 14.1 Libri e pubblicazioni . . . 179 14.2 Siti web consultati . . . 180 14.3 Software utilizzati . . . 180
Elenco delle figure
2.1 Struttura impianto elettrico dell’azionamento . . . 6
2.2 Struttura del singolo convertitore . . . 6
2.3 Cella elementare del convertitore . . . 7
2.4 Circuito inverter a tre gambe . . . 7
2.5 Configurazioni possibili sul piano αβ . . . 9
2.6 Suddivisione dell’intervallo base di commutazione . . . 9
2.7 Esempio di sequenza di commutazione dei tasti ottimale . . . 9
2.8 Sequenza di accensioni per l’approssimazione di un vettore nel primo quadrante . . . 11
3.1 Tubo di flusso che attraversa il traferro . . . 14
3.2 Rotori con magneti sulla superficie . . . 15
3.3 Esempi di rotori con magneti interni . . . 15
3.4 Piano d-q e αβ sovrapposti al piano di macchina . . . 16
3.5 Posizione del vettore associato al flusso dei magneti permanenti 17 3.6 Linee di campo principali secondo l’asse diretto . . . 18
3.7 Linee di campo principali secondo l’asse quadratura . . . 18
3.8 Circuito di asse diretto . . . 21
3.9 Circuito di asse quadratura . . . 21
4.1 Schema meccanico di principio dell’azionamento . . . 24
4.2 Scenario ipotizzato per la valutazione dello stress . . . 25
4.3 Geometrie ipotizzate per il calcolo del Δl . . . 25
4.4 Disegno di massima della sezione assiale della macchina . . . 26
5.1 Sistema in catena aperta . . . 29
5.2 Sistema in retroazione . . . 30
5.3 Schema di principio dell’architettura di controllo utilizzata . . 31
5.4 Strategie di controllo . . . 31
5.5 Esempio di controllo FOC di velocit´a . . . 33
5.6 Posizione del vettore spaziale �ΨS in due istanti successivi . . 34
5.7 Approssimazione di �ΨS sul piano αβ . . . 35
5.8 Diagramma vettoriale nel caso di TE < TERIF . . . 35
5.9 Esempio di controllo DTC di velocit´a . . . 36 xiii
ELENCO DELLE FIGURE
5.10 Controllo del complesso di due macchine . . . 37
6.1 Schema a blocchi del controllo in cascata DTC-SVM . . . 40
6.2 Diagramma vettoriale con i tre sistemi di riferimento utilizzati 40 6.3 Rappresentazione grafica sistema SISO . . . 41
6.4 Modello dinamico flusso tensioni in coordinate αβ . . . 42
6.5 Sistema di riferimento analisi f.d.t . . . 42
6.6 Schema a blocchi del sistema in anello aperto coppia-velocit´a 47 6.7 Schema a blocchi del sistema in anello aperto velocit´a - posizione 47 6.8 Schema a blocchi dell’architettura di controllo in cascata . . . 50
6.9 Processo logico per l’individuazione dei regolatori . . . 51
6.10 Anello di flusso con i due regolatori nel sistema α− β . . . . 52
6.11 Anello di flusso semplificato nel sistema α− β . . . 52
6.12 Sistema in anello chiuso utilizzato per il progetto del regolatore 53 6.13 Schema a blocchi dell’anello di flusso nel discreto . . . 54
6.14 Risposta al gradino di flusso nel discreto . . . 55
6.15 Anello di controllo della coppia . . . 56
6.16 Schema a blocchi per il tuning del regolatore di coppia . . . . 57
6.17 Risposta in frequenza della funzione di trasferimento Te(s) ΔδΨ(s) . 58 6.18 Risposta al gradino di coppia senza prefiltro . . . 58
6.19 Risposta al gradino di coppia con prefiltro . . . 59
6.20 Progetto del controllore di coppia nel discreto . . . 60
6.21 Risposta al gradino di coppia nel discreto . . . 61
6.22 Risposta al gradino di coppia con prefiltro nel discreto . . . . 61
6.23 Schema a blocchi dell’anello di velocit´a in ciclo chiuso . . . . 62
6.24 Confronto tra la risposta al gradino di ˜WT(s) e WT(s) . . . . 63
6.25 Confronto tra la risposta in frequenza di ˜WT(s) e e WT(s) . 63 6.26 Risposta al gradino dell’anello di velocit´a nel continuo . . . . 64
6.27 Anello per il controllo della velocit´a nel discreto . . . 65
6.28 Confronto tra la risposta al gradino della WT(s) e ˜WT(s) nel discreto . . . 67
6.29 Confronto tra la risposta in frequenza della WT(s) e ˜WT(s) nel discreto . . . 67
6.30 Risposta al gradino dell’anello di velocit´a nel discreto . . . . 68
6.31 Schema a blocchi dell’anello di posizione . . . 69
6.32 Risposta al gradino dell’anello di posizione . . . 70
6.33 Anello per il controllo della posizione nel discreto . . . 70
6.34 Risposta al gradino dell’anello di posizione nel discreto . . . . 72
6.35 Logica utilizzata nella costruzione dei modelli . . . 72
6.36 Generatore di riferimenti per l’anello di flusso . . . 73
6.37 Regolatori dell’anello di flusso . . . 73
6.38 Alimentazione con generatori pilotati. . . 74
6.39 Trasformata di Clarke . . . 74
6.40 Alimentazione mediante inverter con modulazione SVM . . . 75 xiv
ELENCO DELLE FIGURE
6.41 Modulatore SVM reperito nelle librerie Simulink . . . 75
6.42 Schema elettrico dell’inverter a 3 gambe . . . 76
6.43 Stimatore delle grandezze per il feedback . . . 78
6.44 Andamento della coppia resistente ipotizzato . . . 78
6.45 Implementazione Simulink della coppia resistente . . . 79
6.46 Legenda colori dei tempi di campionamento [s] . . . 79
6.47 Schema a blocchi per la simulazione dell’anello di flusso . . . 81
6.48 Risposta di ΨSβ(t) al segnale rettangolare @100 rad/s . . . . 82
6.49 Schema Simulink per simulare l’anello di flusso nel discreto . 83 6.50 ΨSβ(t) nel discreto al segnale rettangolare @100 rad/s . . . . 84
6.51 Ingrandimento della risposta discretizzata di ΨSβ(t) . . . 84
6.52 Schema a blocchi per la simulazione dell’anello di coppia . . . 85
6.53 Risposta al gradino di 1000Nm di coppia. . . 86
6.54 Schema Simulink simulazione anello di coppia nel discreto . . 88
6.55 Risposte al gradino di 1000Nm con prefiltro . . . 90
6.56 Schema a blocchi per la simulazione dell’anello di velocit´a . . 91
6.57 Risposta al gradino dell’anello di velocit´a . . . 92
6.58 Risposta al segnale 6.118 dell’anello di velocit´a nel continuo . 93 6.59 Schema a blocchi simulazione anello di velocit´a nel discreto . 94 6.60 Risposta del sistema al riferimento 6.118 nel discreto . . . 95
6.61 Schema a blocchi per la simulazione dell’anello di posizione . 97 6.62 Risposta dell’anello di posizione al riferimento 6.120 . . . 98
6.63 Schema a blocchi simulazione dell’anello di posizione nel di-screto . . . 99
6.64 Risposta al riferimento 6.120 nel discreto . . . 101
6.65 Oscillazioni coppia, velocit´a e posizione con TST=1 ms . . . . 102
6.66 Grandezze caratterizzanti il ripple . . . 103
6.67 Oscillazioni coppia,velocit´a e posizione con TST=5 ms . . . . 104
6.68 Errore relativo al variare dei parametri Ld e Lq . . . 105
6.69 Schema simulazione con inverter SVM . . . 108
6.70 Tensioni di alimentazione in variabili d-q . . . 109
6.71 Correnti di fase . . . 110
6.72 Inseguimento del riferimento di posizione . . . 111
7.1 Architettura di controllo del complesso . . . 114
7.2 Schema test controllo combinato e indipendente . . . 115
7.3 Profilo di posizione richiesto all’azionamento . . . 116
7.4 Disturbo di coppia utilizzato . . . 116
7.5 Controllo combinato e indipendente: violazione dei limiti . . . 117
7.6 Controllo combinato e indipendente: rispetto dei limiti . . . . 117
7.7 Risposta con controllo combinato . . . 119
7.8 Risposta con controllo indipendente . . . 120
7.9 Risposta con controllo indipendente nei limiti . . . 121
7.10 Risposta con controllo combinato nei limiti . . . 122 xv
ELENCO DELLE FIGURE
8.1 Vista d’insieme del convertitore ACSM1 . . . 126
9.1 Trattamento digitale del segnale . . . 128
9.2 Schema funzionale . . . 129
9.3 Piedinatura TMS320F28035 56-Pin RSH VQFN (vista dall’alto)130 9.4 Tabella riassuntiva dei dati in formato IQ . . . 131
9.5 Kit per applicazioni real-time . . . 131
9.6 Configurazione dei pin per l’ADC . . . 132
9.7 Schema elettrico per il campionamento . . . 132
9.8 Sample time al variare della durata della finestra . . . 133
9.9 Registro del risultato . . . 134
9.10 Sequenza temporale del processo di acquisizione . . . 134
9.11 Diagramma funzionale per il modulo ePWM . . . 135
9.12 Principio di funzionamento del PWM . . . 137
9.13 Schema a blocchi funzionale del eQEP . . . 137
9.14 Selezione della funzione del generico pin . . . 138
9.15 Multiplexer porta A . . . 139
9.16 Configurazione della direzione del pin . . . 139
9.17 Pull-Up del pin . . . 139
9.18 Dallo schema a blocchi all’implementazione hardware . . . 141
9.19 IQmath nella libreria C2000 di simulink . . . 141
9.20 Schema complessivo del controllo di macchina . . . 142
9.21 Pannello sinottico di macchina . . . 143
9.22 Mappa degli stati . . . 145
9.23 Sottosistema Comando per DSP . . . 146
9.24 Sottosistema Controllo per DSP . . . 146
9.25 Implementazione hardware del regolatore di flusso Kψ . . . . 147
9.26 Implementazione hardware del prefiltro FT(z) . . . 147
9.27 Implementazione hardware del regolatore di coppia CT(z) . . 148
9.28 Implementazione hardware del regolatore di velocit´a CΩ(z) . 148 9.29 Implementazione hardware del regolatore di posizione Kθ . . 148
9.30 Implementazione hardware delle misure . . . 150
9.31 Ipotesi di impianto per il rilievo del segnale . . . 151
9.32 Encoder incrementale . . . 152
9.33 Segnali in quadratura . . . 152
9.34 Posizione rilevata dall’encoder . . . 152
9.35 Sottosistema Inverter e PMSM per DSP . . . 153
9.36 Elaborazione del dato per il registro CMPA . . . 154
9.37 Inverter ai valori medi . . . 155
9.38 Tempi di campionamento utilizzati . . . 156
9.39 Sequenza di manovre svolta dall’operatore . . . 156
9.40 Risposta del sistema alla manovra richiesta . . . 158
9.41 Corrente lato DC nel controllo con DSP . . . 159
9.42 Tensioni di fase . . . 160 xvi
ELENCO DELLE FIGURE
9.43 Correnti di fase . . . 161
9.44 Coppia e velocit´a nel controllo con DSP . . . 162
11.1 Sistema di riferimento αβ . . . 166
13.1 Implementazione dell’inverter SVM . . . 170
13.2 Calcolo modulo e fase del vettore spaziale . . . 171
13.3 Generatore di impulsi . . . 171
13.4 Settori all’interno dell’esagono . . . 171
13.5 Scelta del settore di pertinenza . . . 172
13.6 Calcolo tempi di commutazione . . . 172
13.7 Inversione di TA con TB nel caso di settore pari . . . 174
13.8 Individuazione dei tempi di accensione delle valvole . . . 174
13.9 Timeline . . . 174
13.10Implementazione dello scheduling . . . 175
13.11Ricerca della posizione sulla timeline . . . 175
13.12Comando degli interruttori elettronici di potenza . . . 176
13.13Inverter a tre gambe . . . 176
13.14Tensioni di fase in uscita dall’inverter . . . 177
ELENCO DELLE FIGURE
Elenco delle tabelle
1.1 Sistema meccanico e meccatronico . . . 2
6.1 Riassunto del progetto dell’anello di flusso nel continuo . . . . 53
6.2 Riassunto del progetto dell’anello di flusso nel discreto . . . . 55
6.3 Riassunto del progetto dell’anello di coppia nel continuo . . . 59
6.4 Riassunto del progetto dell’anello di coppia nel discreto . . . 61
6.5 Riassunto del progetto dell’anello di velocit´a nel continuo . . 65
6.6 Riassunto del progetto dell’anello di velocit´a nel discreto . . . 68
6.7 Riassunto del progetto dell’anello di posizione nel continuo . 70 6.8 Riassunto del progetto dell’anello di posizione nel discreto . . 71
6.9 Parametri caratteristici del PMSM . . . 76
6.10 Parametri da impostare nel modello PMSM . . . 77
6.11 Configurazione simulazione anello di flusso nel continuo . . . 80
6.12 Configurazione simulazione anello di coppia nel continuo . . . 82
6.13 Configurazione simulazione anello di coppia nel discreto . . . 87
6.14 Configurazione simulazione anello di velocit´a . . . 89
6.15 Configurazione simulazione anello di velocit´a nel discreto . . . 92
6.16 Configurazione simulazione anello di posizione nel continuo . 96 6.17 Configurazione simulazione anello di posizione nel discreto . . 100
6.18 Sintesi oscillazioni per TS come da progetto . . . 103
6.19 Sintesi sui regolatori impiegati con il TST di progetto . . . 105
6.20 Sintesi sui regolatori impiegati con il TST=5ms . . . 106
6.21 Sintesi sui regolatori impiegati con il TST=10ms . . . 106
6.22 Parametri da impostare nella maschera dell’inverter . . . 107
6.23 Configurazione simulazione anello di posizione con inverter SVM . . . 107
8.1 Specifiche richieste al convertitore . . . 124
8.2 Caratteristiche tecniche del ACSM1-090A-4 . . . 124
9.1 Definizione degli I/O . . . 143
9.2 Definizione degli stati . . . 144
9.3 Condizione appartenenza agli stati . . . 144
9.4 Configurazione ADC correnti . . . 149 xix
ELENCO DELLE TABELLE
9.5 Configurazione modulo eQEP . . . 151 9.6 Configurazione modulo ePWM . . . 154 9.7 Tipi di dato utilizzati . . . 155
Lista dei simboli
¯
IABC Vettore colonna con le correnti di fase ABC di statore
Δl Allungamento longitudinale della connessione meccanica Δθm Differenza di posizione tra il motore destro e sinistro
δΨ Posizione angolare del vettore ΨS nel piano d-q
ηi Rendimento inverter ipotizzato
− →
IS xy Vettore spaziale delle correnti di statore nel piano x-y
θΨ Posizione angolare dell’asse x rispetto al sistema α− β
θm Posizione angolare del rotore (angolo meccanico)
θr Posizione angolare dell’asse d rispetto al sistema α− β (angolo
elet-trico) ˜
ΨP M Flusso a vuoto determinato dai magneti permanenti
�
ISdq Vettore delle correnti sul piano di Park �
Vαβ Vettore spaziale sul piano α− β
BT Banda passante a 3 dB in ciclo chiuso dell’anello di coppia
De Diametro esterno rotore
Dr Diametro interno del rotore
Dis Diametro interno supporto
E(z) Ingresso nel generico sistema discreto hm Altezza dei magneti nella direzione radiale
hry Altezza supporto nella direzione radiale
ISα Componente α del vettore spaziale �IS
ELENCO DELLE TABELLE
Jr Momento di inerzia della macchina
la Sviluppo assiale della macchina
LAA Rapporto tra il flusso concatenato con la fase A e la corrente che
circola nello stesso avvolgimento, nel caso di macchina con rotore anisotropo il rapporto dipende da θr.
Ld Induttanza diretta nel modello di Park della macchina Lq Induttanza di quadratura nel modello di Park della macchina Mr Massa del rotore
Mlamr Massa dei lamierini del giogo di rotore
Mmag Massa dei magneti permanenti
Pd Potenza elettrica lato DC
Rs Resistenza di una fase di statore
Te Coppia elettromagnetica
TS Tempo di campionamento
trM AX Tempo di salita (10% - 90%) dell’anello pi´u lento
trM IN Tempo di salita (10% - 90%) dell’anello pi´u veloce
U (z) Uscita del generico sistema discreto Vs Volume del supporto
C(s) Regolatore F(s) Prefiltro
G(s) Funzione di trasferimento in anello aperto W(s) Funzione di trasferimento in anello chiuso
Capitolo 1
Introduzione
Il successo nella produzione e nelle vendite di prodotti in un mercato mon-diale dipende in misura crescente dalla capacit´a di integrare l’elettronica e le tecnologie computerizzate in un ampio sistema di prodotti e processi principalmente meccanici. Per raggiungere questa integrazione si combina-no le discipline fondamentali: ingegneria elettrica, meccanica e informatica. Le basi di un approccio meccatronico all’ingegneria della progettazione si trovano nell’informazione e nel controllo.
L’utilizzo di un asse elettrico in sostituzione delle trasmissioni meccaniche o idrauliche facilita le operazioni di: manutenzione, trasporto ed eventua-le sostituzione. La struttura modulare ´e costituita da unit´a monoblocco motore-drive ognuna con il suo segnale di riferimento. La connessione e disconnessione dall’albero elettrico risulta rapida ed efficiente. Scompaiono i problemi legati all’usura come giochi e perdite volumetriche caratteristici delle trasmissioni meccaniche e idrauliche. Il motore in presa diretta con-sente di migliorare la dinamica degli azionamenti e il peso complessivo. Gli svantaggi principali sono legati all’affidabilit´a e alla sicurezza, per esem-pio durante la perdita di un drive o malfunzionamenti del firmware. A tal proposito risulta necessario investire sulla solidit´a e ridondanza delle parti hardware e software.
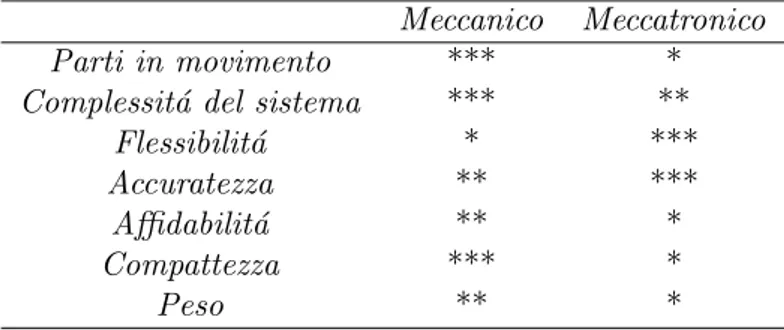
L’elaborato si inserisce in questo contesto, dimostrando l’alternativa elettri-ca nel elettri-campo della trasmissione sincrona del moto. In tabella 1.1 si riporta il confronto tra un sistema puramente meccanico ed uno meccatronico. L’obiettivo ´e la realizzazione di un controllo per garantire il moto sincrono tra due motori sincroni a magneti permanenti non convenzionali, attraverso dispositivi digitali presenti sul mercato. La tesi viene dimostrata facendo uso di analisi, elaborazioni e risultati.
CAPITOLO 1. INTRODUZIONE
Meccanico Meccatronico Parti in movimento *** * Complessit´a del sistema *** **
Flessibilit´a * *** Accuratezza ** *** Affidabilit´a ** * Compattezza *** * Peso ** * Tabella 1.1: Sistema meccanico e meccatronico
1.1
Motivazioni
Progettare il controllo di questo azionamento rappresenta una sfida che ho raccolto con molto entusiasmo e dedizione. Durante il mio percorso di studi ho appreso la teoria del controllo e l’analisi dinamica delle macchine elettri-che. Il fascino verso questi due temi mi ha spinto ad intraprendere un lavoro durato sei mesi dove ho perfezionato il metodo di analisi e risoluzione dei problemi.
Un articolo pubblicato sul Sole24Ore del 3 novembre 2011 in piena crisi eco-nomica, riportava il confronto tra il valore di affari fra il primo semestre del 2010 e il 2011, registrando un +26%. Il settore dell’automazione industria-le, soprattutto il comparto degli azionamenti elettrici, risulta un ambiente dinamico e dominato dalla vivacit´a della domanda. In prospettiva futura ho ritenuto formativo trattare il tema interdisciplinare del controllo combinato di motori brushless.
1.2
Obiettivi della tesi
L’elaborato approfondisce il tema del controllo diretto di coppia. Il pro-getto riguarda il sistema di controllo per un azionamento costituito da due brushless non convenzionali. L’obietivo primario ´e lo studio della dinamica del sistema e la sintesi dei regolatori da eseguire sulla singola macchina e sul complesso. Infine si richiede la relazione generale per l’esecuzione del progetto.
1.3
Organizzazione dei capitoli
L’elaborato ´e composto da nove capitoli, i primi argomentano le scelte pro-gettuali mentre la seconda parte descrive il sistema di controllo ed i risultati ottenuti.
Il primo capitolo ´e una panoramica sulle strategie di pilotaggio degli attua-2
1.3. ORGANIZZAZIONE DEI CAPITOLI tori (inverter) ritenute adatte al lavoro da svolgere.
Si procede con la descrizione del modello dinamico utilizzato a partire dalle variabili base fino ad ottenere la rappresentazione in un sistema solidale al rotore.
Il capitolo seguente tratta il tema della meccanica, occupandosi della corre-lazione tra la variabile osservata e gli effetti sulle parti meccaniche. Infine si procede alla descrizione della geometria dell’azionamento calcolando i prin-cipali parametri meccanici.
Proseguendo si argomenta la scelta sul tipo di controllo da impiegare e le principali tecniche nel campo delle macchine elettriche.
Il sesto capitolo ´e il cuore del testo. Si tratta la sintesi dei regolatori, a partire dall’analisi dinamica analitica del sistema, terminando con la dimo-strazione empirica mediante simulazioni software.
Si introduce una seconda macchina gemella completando la struttura com-plessiva dell’azionamento. All’interno del settimo capitolo si argomenta la scelta del controllo combinato confrontando i risultati ottenuti.
La parte finale ´e dedicata alle soluzioni pre-ingegnerizzate e personalizzate. Si prende in considerazione due scenari, non esclusivi, per lo sviluppo hard-ware e softhard-ware del sistema di controllo e comando.
Le appendici poste a corollario di quanto analizzato e sintetizzato vogliono fornire supporto alla comprensione di alcune parti del progetto.
CAPITOLO 1. INTRODUZIONE