Capitolo 1: La reologia
Capitolo 1: La reologia
1.1 Generalità
La reologia è la scienza che studia le relazioni sforzo-deformazione nei corpi, permettendo così di prevedere, ai fini pratici, il comportamento di un materiale sotto determinate condizioni di utilizzo.
Qualsiasi prodotto, compresi quelli dei quali facciamo quotidianamente uso, deve presentare caratteristiche adeguate a tutte le fasi del processo produttivo attraverso il quale giunge al consumatore e deve avere una durata nel tempo accettabile per l’uso al quale è destinato.
Basta pensare ad un lubrificante per motori: deve essere abbastanza fluido da poter essere aspirato dalla pompa, ma non tanto da lasciare scoperta la superficie dei pistoni, mantenendo inoltre inalterate le sue caratteristiche per lungo tempo. Un bitume per pavimentazione stradale deve poter essere facilmente miscelato al materiale litoide per ottenere una mescola adatta alla stesa, ma allo stesso tempo deve poter resistere alle sollecitazioni del traffico stradale senza deteriorarsi. Nell’industria alimentare, cosmetica o farmaceutica, si presentano problemi reologici non trascurabili: per esempio una crema o una pomata deve poter essere spalmata facilmente ma non deve essere tanto liquida da colare.
Come si può capire da questi esempi il campo di applicazione degli studi reologici è vastissimo, poiché ogni materiale, soggetto a sforzi di varia natura, risponde con un comportamento diverso.
Rigorosamente, a livello teorico, tutti i materiali presentano una risposta di tipo viscoelastico alle sollecitazioni imposte. Nei polimeri, sopra la temperatura di transizione vetrosa Tg, tale comportamento è dominante; i bitumi, specialmente quelli modificati sono assimilabili, in termini di proprietà reologiche, a polimeri di basso peso molecolare: sono viscoelastici (con carattere prevalentemente solido) a
Capitolo 1: La reologia
temperatura ambiente e viscosi (cioè a carattere prevalentemente liquido) ad alta temperatura. In questo capitolo sono illustrate le proprietà viscoelastiche dei materiali ed i metodi sperimentali con i quali tali proprietà possono essere determinate. In particolare si fa riferimento all’analisi dinamica in regime oscillatorio, utilizzata nel corso di questa tesi per studiare le proprietà meccaniche di un bitume modificato.
1.2 Comportamento viscoelastico
La teoria della viscoelasticità è di facile comprensione se facciamo riferimento a due modelli ideali: il solido elastico ed il liquido viscoso.
Un solido elastico ha una forma ben definita e l’applicazione di forze esterne lo porta ad una nuova forma di equilibrio. Il solido immagazzina tutta l’energia ottenuta dal lavoro compiuto dalle forze esterne e tale energia, disponibile alla rimozione della forza applicata, permette al solido di ritornare esattamente alla forma originaria. Un solido ideale soggetto ad uno sforzo si deforma elasticamente: l’energia spesa nella deformazione si conserva sotto forma di energia potenziale elastica ed è restituita quando viene rimosso lo sforzo applicato.
Al contrario, fluidi ideali subiscono deformazioni totalmente irreversibili: in altre parole, tutta l’energia spesa per imporre la deformazione è dissipata sottoforma di calore e non può essere restituita annullando la deformazione stessa (comportamento puramente viscoso).
La legge di Hooke e la legge di Newton descrivono rispettivamente il comportamento dei corpi elastici e dei fluidi viscosi, definendo le relazioni sforzo-deformazione per i due casi.
Legge di Hooke:
τ
=
G
⋅
γ
= = = [m/m] [Pa] [Pa] ne deformazio elasticità di modulo G sforzoγ
τ
(1.1)Capitolo 1: La reologia
materiale ed indipendente dalla velocità di deformazione. Il modulo di elasticità definisce la resistenza del solido alla deformazione ed e’ una proprietà che dipende dal materiale e dalla sua storia termica. La legge di Hooke è valida sia per sforzi normali che per sforzi tangenziali.
Legge di Newton:
τ
=
η
⋅
γ
&
= ⋅ = = [m/m] s] [Pa cos [Pa] ne deformazio di velocità ità vis sforzoγ
η
τ
& (1.2)Nei fluidi puramente viscosi lo sforzo è proporzionale alla velocità di deformazione ed indipendente dall’entità della deformazione stessa. La viscosità η
definisce la resistenza di un fluido alla variazione irreversibile di posizione dei suoi elementi di volume. Per un liquido Newtoniano ideale la curva di flusso è una retta di pendenza
α
γ
τ
η
= &=tan che passa per l’origine degli assi. La similitudine analitica fra le due leggi è evidente.Ci sono due tipi importanti di deviazioni dal comportamento puramente Hookeano o Newtoniano [1]:
1. La deformazione in un solido, o la velocità di deformazione in un liquido, possono non essere direttamente proporzionali allo sforzo applicato ma avere una dipendenza più complessa.
2. Lo sforzo può dipendere sia dalla deformazione sia dalla velocità di deformazione, quindi tali anomalie riflettono un comportamento insieme elastico e viscoso, e tale comportamento è chiamato viscoelastico.
Al primo caso appartengono i liquidi non Newtoniani, nei quali la viscosità non è costante, ma dipende dal gradiente della velocità di deformazione con una relazione del tipo τ =η(γ&)⋅γ&; per questi liquidi la curva di flusso non è una retta ma una curva
Capitolo 1: La reologia
il cui andamento dipende dalla relazione che lega la viscosità al gradiente della deformazione. Un esempio di questo comportamento sono i fluidi dilatanti, nei quali la viscosità aumenta all’aumentare del gradiente, o i liquidi pseudoplastici, per i quali accade il contrario. Nei solidi tali anomalie si presentano al superamento del limite elastico (fenomeni di snervamento, strizione, ecc.)
Occorre sottolineare che l’entità dello scostamento dal comportamento Newtoniano o puramente elastico non è una proprietà intrinseca di un materiale, ma dipende dallo stato fisico-chimico in cui si trova; in particolare è fortemente dipendente dalla temperatura.
Nel secondo caso la relazione più semplice che descrive il legame sforzo/deformazione è di tipo lineare:
γ
η
γ
τ
τ
τ
=
E+
V=
G
⋅
+
⋅
&
(1.3)Questa semplice equazione costitutiva rappresenta il comportamento viscoelastico lineare ed implica che gli sforzi connessi a deformazione e velocità di deformazione siano additivi.
Nella maggior parte dei materiali il comportamento lineare si ottiene con deformazioni o gradienti di deformazione infinitesimi; nel caso di deformazioni o velocità di deformazione “finite” le relazioni sforzo-deformazione si presentano molto più complesse, in quanto il materiale esce dalla regione di viscoelasticità lineare.
Ovviamente non c’è un valore ben definito che pone il confine fra sollecitazione “infinitesima” e “finita”, ma dipende dal tipo di materiale e dallo stato fisico-chimico in cui si trova. Se sono applicate deformazioni infinitesime la validità della legge di Hooke si estende infatti alla maggior parte dei solidi reali; parimenti i fluidi seguono la legge di Newton per velocità di deformazione infinitesime.
Il tipo di materiale oggetto di studio e la strumentazione disponibile suggeriscono se utilizzare tecniche “ad impulso”, cioè con applicazione di stress o strain istantanei (esperimenti di creep o stress relaxation) oppure tecniche dinamiche per analizzare le
Capitolo 1: La reologia
proprietà meccaniche di un campione da testare.
1.3 Creep e stress relaxation
Le prove di creep sono condotte applicando uno stress costante al campione e misurando l’andamento temporale della deformazione; tolto il carico si può valutare il creep recovery, cioè il ritorno della deformazione nel tempo.
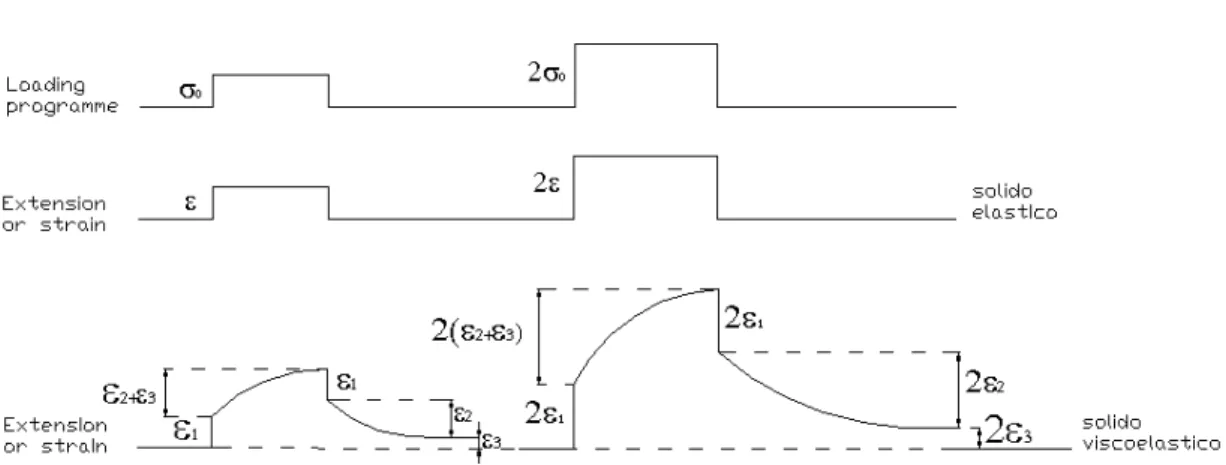
In Figura 1-1 è riportato il confronto della risposta a creep di un solido elastico e di un generico materiale viscoelastico lineare all’applicazione di due valori di carico σ 0
e 2σ 0 .
Nel solido elastico la deformazione segue l’andamento del programma di carico, in proporzionalità esatta all’entità del carico applicato. Gli stessi carichi sono applicati ad un materiale viscoelastico lineare; in tal caso lo strain totale è la somma di tre contributi: ε1 ed ε2 sono rispettivamente la deformazione elastica istantanea e
ritardata, mentre ε3 è una deformazione residua non recuperabile, dovuta allo
scorrimento viscoso.
Figura 1-1: creep e creep recovery
Si definisce in tal modo una grandezza J(t), detta “cedevolezza” o creep compliance, funzione del tempo e somma di più contributi:
Capitolo 1: La reologia 3 2 1 ) ( ) ( J J J t J t = = + + σ ε (1.4)
Nei polimeri reticolati, se il carico è applicato per un tempo sufficientemente lungo, la deformazione raggiunge un valore limite Je (equilibrium compliance), e non si
presenta il termine J3, vale a dire che la deformazione è completamente recuperata; i
termini J1 e J2 rappresentano rispettivamente il termine unrelaxed, cioè la risposta
immediata elastica, ed il termine relaxed, il cui valore dipende dal tempo.
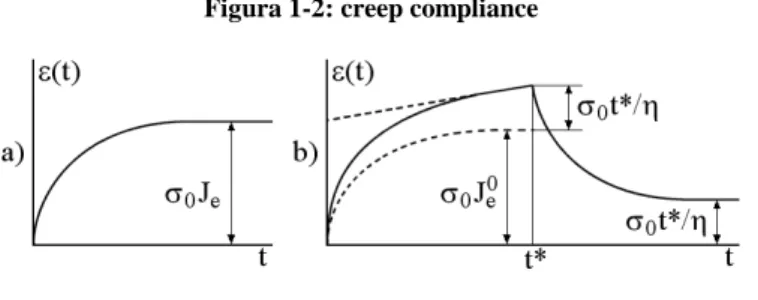
Altri materiali, quali i polimeri non reticolati, sotto carico costante raggiungono una condizione di flusso stazionario (steady-state flow) dove la velocità di deformazione è costante e definita da un unico parametro, la viscosità newtoniana η 0 (steady-state viscosity).
In questo caso non si presenta il valore limite
J
e, ma si parla di steady-statecompliance
J
e0,
ottenibile sottraendo il contributo viscoso al tempo t* (Figura 1-2)Figura 1-2: creep compliance
La presenza di una equilibrium compliance permette di definire un materiale come un solido viscoelastico, mentre nel secondo caso la presenza di scorrimento viscoso indica che abbiamo a che fare con liquidi viscoelastici.
La controparte delle prove a creep è costituita dagli esperimenti di stress relaxation. In questo caso è applicata sul materiale una deformazione costante istantanea e si misura il rilassamento della tensione; questo fenomeno è dovuto alla ridistribuzione delle molecole nel materiale senza che ci siano variazioni macroscopiche di volume. L’assunzione di linearità definisce lo stress relaxation modulus:
Capitolo 1: La reologia ) ( ) ( 0 t G t =
ε
σ
(1.5)E’ importante rimarcare che quanto detto è valido esclusivamente nel campo delle piccole deformazioni.
1.4 Principio di sovrapposizione di Boltzmann
Il comportamento lineare ha le sue basi analitiche nel principio di sovrapposizione di Boltzmann [1].
Le ipotesi avanzate dall’autore sono: a) le funzioni J(t) e G(t) dipendono, al tempo t, da tutto quanto è successo al materiale a tempi precedenti; b) il contributo all’istante t a tali funzioni, prodotto ad un tempo qualunque t’ < t da stress o strain imposti, non dipende dai contributi a tempi t’’< t , ovvero i contributi a tempi diversi ti < t vanno
semplicemente sommati.
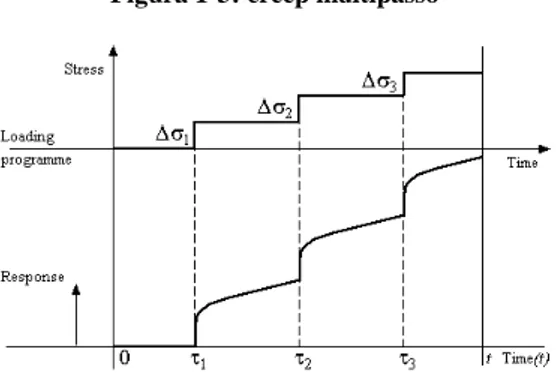
Il principio può essere illustrato mediante un esperimento di “creep multipasso” (Figura 1-3).
Figura 1-3: creep multipasso
Applicando al tempo t = 0 uno stress σ 0, strain e stress sono legatidall’equazione:
0 ) ( ) (
σ
ε
t = J t ⋅ (1.6)Capitolo 1: La reologia 1 1 0 ( ) ) ( ) (
σ
τ
σ
ε
t = J t ⋅ +J t− ⋅ (1.7)Al generico tempo t avremo ( ) ( i)
i
i J t
t σ τ
ε =
∑
⋅ − . Il passaggio all’integrale, cioè all’applicazione di uno stress continuo, si ottiene per(
τ
i+1−τ
i)
→0:ds ds s dJ s t t J t
∫
∞ ⋅ − + = 0 ) ( ) ( ) ( ) 0 ( ) (σ
σ
ε
(1.8) dove s = t - τ i.La situazione è analoga se si vuole valutare lo stress in funzione di una storia di deformazione continua: ds ds s dG s t t G t
∫
∞ ⋅ − + = 0 ) ( ) ( ) ( ) 0 ( ) (γ
γ
σ
(1.9)1.5 Analisi dinamica in regime oscillatorio
Gli esperimenti di creep e stress relaxation sono metodi utili per misurare il comportamento a tempi lunghi di carico. I metodi dinamici in regime sinusoidale permettono di estendere la curva di caratterizzazione di un materiale in un range di frequenze molto vasto (10-9-109 Hz) in tempi relativamente brevi. Le prove condotte ad una certa frequenza ω sono infatti qualitativamente equivalenti ai risultati ottenuti
ad un tempo di prova t =1/ω [1].
La procedura sperimentale prevede l’applicazione di una deformazione tangenziale (shear strain) oscillatoria con una data pulsazione ω e la misura simultanea dello sforzo di taglio (shear stress), o viceversa. Le prove sono condotte con l’ausilio di un reometro rotazionale(1).
Supponiamo che al campione in esame sia applicata una deformazione di ampiezza
(1)
Capitolo 1: La reologia 0
γ
(2) e andamento sinusoidale:t)
(
sin
)
(
=
γ
0⋅
ω
⋅
γ
t
(1.10)La velocità d’applicazione della deformazione (strain rate) è definita come:
t)
cos(
)
(
=
γ
=
ω
⋅
γ
0⋅
⋅
γ
dt
d
t
&
(1.11)Se il materiale in studio presenta un comportamento viscoelastico lineare, risponderà alla sollecitazione con uno (shear) stress anch’esso sinusoidale, sfasato di un angolo
δ, rispetto alla deformazione applicata, il cui valore dipende dalle caratteristiche del materiale:
t)
cos(
'
G'
t)
sin(
G'
)
(
t)
cos(
)
sin(
t)
sin(
)
cos(
)
(
)
t
(
sin
)
(
0 0 0 0 0⋅
⋅
⋅
+
⋅
⋅
⋅
=
⋅
⋅
⋅
+
⋅
⋅
⋅
=
+
⋅
⋅
=
ω
γ
ω
γ
τ
ω
δ
τ
ω
δ
τ
τ
δ
ω
τ
τ
t
t
t
(1.12) (1.13) (1.14) dove: cos( ) 0 0δ
γ
τ
= ′ G sin( ) 0 0δ
γ
τ
= ′′ G (1.15)Le quantità G’ e G’’ sono definite rispettivamente storage e loss modulus.
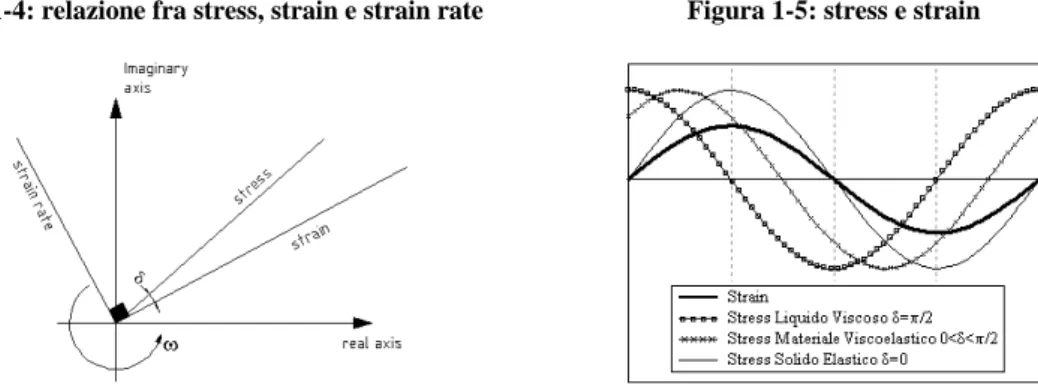
Le equazioni riportate mettono in evidenza che lo sforzo di taglio si può esprimere come la somma di un termine in fase con la deformazione ed un termine in quadratura (in fase quindi con la velocità di deformazione). Un solido elastico presenterà un angolo di fase nullo, mentre δ= π /2 caratterizza il comportamento
viscoso; ovviamente se δ è prossimo a π /2 prevarrà il comportamento viscoso,
mentre angoli vicini a 0° indicano caratteristiche elastiche prevalenti.
(2)
γ e τ sono i termini generalmente utilizzati per indicare rispettivamente deformazione e sforzo di
Capitolo 1: La reologia
Figura 1-4: relazione fra stress, strain e strain rate Figura 1-5: stress e strain
La notazione con i numeri complessi ci permette di scrivere:
t i
e
ωγ
ω
γ
*
(
)
=
0⋅
(1.16) ) t ( 0 ) ( *ω
τ
ω δτ
= ⋅ i ⋅+ e (1.17) ' ' ' * * * 0 0 G i G G ei = = + ⋅ = δγ
τ
γ
τ
(1.18)Le misure dinamiche forniscono infatti il valore del modulo complesso
G
*
(
ω
)
, definito come il rapporto fra lo stress e la deformazione totali subiti dal materiale ad una data frequenza:) ( ' ' ) ( ' ) ( * ) ( ) (
ω
ω
ω
ω
γ
ω
τ
G i G G = + ⋅ = (1.19) ) ( ' ωG descrive la capacità del campione di immagazzinare energia elastica, mentre )
( ' ' ω
G è connesso alla capacità di dissiparla; i due termini non rappresentano la componente elastica e la componente viscosa del materiale ad una data frequenza, in quanto la maggior parte dei materiali presenta anche una risposta elastica ritardata, che dipende dal tempo, ma la deformazione conseguente è recuperabile.
In maniera analoga è definita una complex compliance:
) ( '' ) ( ' ) ( * ) ( ) (
ω
ω
ω
ω
τ
ω
γ
J i J J = − ⋅ = (1.20)Capitolo 1: La reologia
dove J’ e J’’ (storage e loss compliance) hanno lo stesso significato di G’ e G’’. Si fa notare che J* e G* sono uno il reciproco dell’altro, ma non vale la stessa cosa per i termini reali e immaginari delle due funzioni.
Il rapporto fra l’energia persa e quella immagazzinata in ogni oscillazione, definito
loss tangent, fattore di perdita o damping, è dato dalla quantità:
) ( ' ) ( ) ( ' ) ( ''
ω
ω
ω
ω
δ
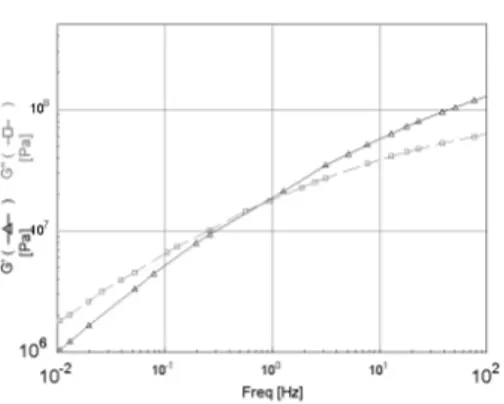
J J G G tg = = ′′ (1.21)Il valore al quale G’(ω ) e G’’(ω ) si eguagliano, ossia quando tg
δ
è uguale a uno, èdefinita frequenza di crossover (ω
c). Questo valore rappresenta il punto in cui si
passa da un comportamento prevalentemente dissipativo ad un comportamento prevalentemente elastico, o viceversa.
Figura 1-6: frequenza di crossover
Un’ altra quantità indice del comportamento di un materiale è la viscosità complessa, rapporto fra lo stress applicato e la strain rate; dalle relazioni nel campo dei numeri complessi si ottiene: ( ) *( ) *( ) '( ) ''( ) ( ) G i i τ ω ω η ω η ω η ω γ ω ω = = = − ⋅ & = =
ω
ω
η
ω
ω
η
) ( ' ' ' ) ( ' ' ' G G (1.22)Capitolo 1: La reologia
La parte reale η ’, definita viscosità dinamica, è un termine atto a descrivere gli effetti
dissipativi; è infatti il rapporto fra lo stress in fase con la strain rate e lo strain applicato.
Perω →0, corrispondente a tempi di carico elevati, la viscosità dinamica tende a coincidere con la steady flow viscosity η 0, definita nei paragrafi precedenti.
1.6 Modelli meccanici del comportamento viscoelastico
Per schematizzare il comportamento dei materiali dal punto di vista macroscopico si fa riferimento a due ideali modelli meccanici di comportamento: la molla e il pistone idraulico; la prima modella una risposta puramente elastica, il secondo un comportamento puramente viscoso.L’opportuna combinazione di questi due elementi da vita a modelli utili per la comprensione delle relazioni sforzo-deformazione dei materiali. I più noti sono quelli di Maxwell e di Voigt, ma proprio in virtù della loro semplicità costruttiva non sono adatti a modellizzare le risposte dei materiali reali.
1.6.1 Modello di Maxwell
Il modello di Maxwell è costituito da un elemento elastico ed un elemento viscoso in serie. Applicando una tensione σ 0 fra i
punti A e B si ottiene una deformazione somma dei contributi dei due elementi. A questo sistema è possibile applicare una deformazione istantanea
ε
0, che permette di effettuare prove distress relaxation; non può invece modellizzare una risposta elastica ritardata.
Capitolo 1: La reologia
1.6.2 Modello di Voigt
Il modello di Voigt è costituito da un elemento elastico e uno viscoso in parallelo. Applicando una deformazione finita tra i punti A e B, la tensione si ripartisce fra i due elementi; non è adatto a modellizzare una prova di stress relaxation, in quanto non è possibile applicare una deformazione istantanea al sistema per la presenza dell’elemento viscoso. Per lo stesso motivo è adeguato a rappresentare la risposta elastica ritardata e permette una buona modellizzazione del creep.
Se Gi=1/Ji è la rigidità della molla e η i la viscosità del pistone, si definisce
i i Gi
λ η
= il tempo di rilassamento di un elemento di Maxwell; λι è una misura del tempo richiesto per il rilassamento della tensione. La stessa quantità, per un elemento di Voigt, è detta tempo di ritardo ed è una misura del tempo che occorre all’elemento elastico per tornare alla configurazione di equilibrio, ritardato dalla presenza dell’elemento viscoso in parallelo. Si ottiene così l’espressione delle funzioni viscoelastiche G(t), J(t), G’(ω ), G’’(ω ) per i due sistemi:Maxwell Voigt a) J(t)= Ji +t/
η
g) J(t)= Ji ⋅[
1−exp(−t/λ
i)]
b) G(t)=Gi ⋅exp(−t/λ
i) h) G(t)=Gi c) 2 2 2 2 1 ) ( ' i i i G Gλ
ω
λ
ω
ω
+ ⋅ = i) G'(ω
)=Gi d) 2 2 1 ) ( ' ' i i i G Gλ
ω
ωλ
ω
+ ⋅ = l)G
''
(
ω
)
=
G
i⋅
ωλ
i=
ωη
i e) J'(ω
)=Ji m) 2 21
)
(
'
i iJ
J
λ
ω
ω
+
=
f) i i i J J ωη ωλ ω) 1 ( ' ' = = n) 2 2 1 ) ( '' i i i J Jλ
ω
ωλ
ω
+ = (1.23)Capitolo 1: La reologia
Come già accennato, queste funzioni sono molto semplici e quasi mai corrispondono all’effettiva risposta di un materiale ad una sollecitazione: infatti la creep compliance nel modello di Voigt e lo stress relaxation modulus in quello di Maxwell sono funzioni esponenziali del tempo, ma tale andamento non ha riscontri reali. Di conseguenza nasce la necessità di creare modelli meccanici in grado di simulare l’andamento reale delle relazioni sforzo/deformazione, basandosi sulla combinazione di questi elementi base. Il passo successivo è la definizione di funzioni matematiche in grado di descrivere il comportamento di sistemi eterogenei complessi dove abbiamo distribuzioni praticamente continue dei tempi di ritardo e di rilassamento.
1.7 Spettri di ritardo e di rilassamento
Gli elementi di Maxwell e Voigt possono essere combinati per ottenere modelli più complessi di comportamento. Ponendo più elementi di Maxwell in serie i singoli elementi si sommano linearmente:
∑
= JiJ 1/
η
=∑
(1/η
i) (1.24 a,b) vale lo stesso ragionamento per più elementi di Voigt in parallelo:∑
= GiG
η
=∑
η
i (1.25 a,b)Entrambi questi modelli comunque non aggiungono niente alle caratteristiche del singolo elemento, modificando solo il valore dei singoli parametri. Se invece si pongono più elementi di Maxwell in parallelo e più elementi di Voigt in serie si ottengono sistemi più complessi.
Capitolo 1: La reologia
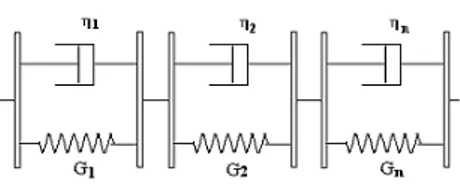
Figura 1-8: elementi di Maxwell in parallelo
Un gruppo di elementi di Maxwell in parallelo rappresenta uno spettro discreto di tempi di rilassamento; in questa disposizione degli elementi le forze applicate sono additive, e l’espressione della funzione G(t) diventa:
1 ( ) exp( / ) n e i i i G t G G t
λ
→ = +∑
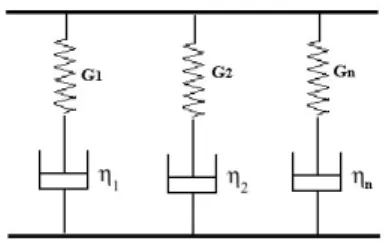
⋅ − (1.26)Analogamente, più elementi di Voigt in serie rappresentano uno spettro discreto di tempi di ritardo; in questo caso sono le deformazioni ad essere additive, e quindi per il modello di Voigt si ottiene:
[
]
0 1 ( ) 1 exp( / ) / n i i i J t J tλ
tη
→ =∑
⋅ − − + (1.27)Se il numero di elementi di Maxwell tende all’infinito si ottiene uno spettro continuo H(λ) definito spettro di rilassamento. In uno spettro continuo il contributo infinitesimo Hdλ al modulo di rilassamento è dato dai
λ
i nell’intervallo (λ λ
i, i+dλ
i). In pratica H(λ) indica la percentuale di elementi che hanno un tempo caratteristico nell’intervallo considerato. Dato l’ampio intervallo di frequenze (di tempi) sul quale sono studiate le proprietà meccaniche, spesso si utilizza una scala logaritmica, considerando quindi gli intervalli ( lnλ
i, lnλ
i+dlnλ
i), da cui abbiamo le espressioni: 0 ( ) e exp( / ) ln G t G H tλ
dλ
∞ = +∫
⋅ − (1.28)Capitolo 1: La reologia
( )
( )
2 2 0 ( ) 1 e d Gω
G Hωλ
λ
λ
ωλ
+∞ ′ = + ⋅ +∫
(1.29)( )
2 0 ( ) 1 d Gω
Hωλ
λ
λ
ωλ
+∞ ′′ = ⋅ +∫
(1.30)Con riferimento alle proprietà dinamiche, discretizzando H(λ) con l’ausilio di un numero finito N di elementi di Maxwell, si ottiene:
( )
( )
∑
= + + = N i i i i e g G G 1 2 2 1 ) ( 'ωλ
ωλ
ω
(1.31)( )
∑
= + = N i i i i g G 1 2 1 ) ( ''ωλ
ωλ
ω
(1.32)Il calcolo dei gi e λi e’ un problema matematico fortemente mal condizionato per la
soluzione dei quali sono disponibili dei software, come per esempio “IRIS” (Interactive Rheological Software) sviluppato da Baumgärtel e Winter.
La procedura per ottenere G’(ω ) e G’’(ω ) si ripete esattamente per J’(ω ) e J’’(ω )
considerando un numero infinito di elementi diVoigt in serie dai quali si ottiene lo spettro continuo dei tempi di ritardo L(λ) [1].
1.8 Principio di equivalenza tempo-temperatura
Le proprietà viscoelastiche, specialmente a temperature superiori a quella di transizione vetrosa del materiale, sono fortemente dipendenti dalla temperatura, ed anche in presenza di un comportamento lineare occorre valutare le proprietà meccaniche alle diverse temperature nel range di interesse.
Per alcuni materiali, definiti “termoreologicamente semplici”, è stata provata la validità del principio di sovrapposizione tempo-temperatura o metodo delle variabili
ridotte; il principio afferma che la stessa variazione di una grandezza meccanica
Capitolo 1: La reologia
ottenere variando la frequenza e tenendo fissa la temperatura.
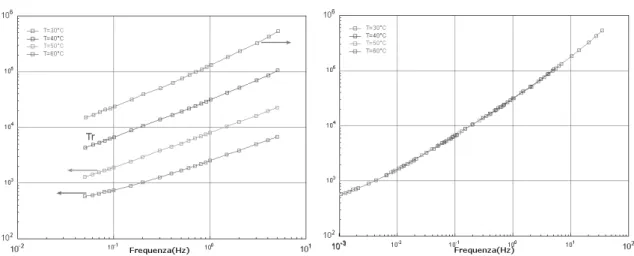
Conseguenza immediata di tale principio è la possibile visualizzazione su una singola curva del comportamento viscoelastico del materiale in un range di frequenze assai più ampio di quello accessibile all’apparecchiatura sperimentale, semplificando notevolmente la visualizzazione degli effetti della temperatura sulle proprietà meccaniche. Il metodo afferma che una qualsiasi funzione viscoelastica, ad esempio G’(ω ), nel passare da T a Tr segue l’equazione:
) ( ' ) ( ' T b G T G r = T con
ρ
ρ
⋅ ⋅ = T T b r r T (1.33)allo stesso modo, prendendo una frequenza di riferimento ω si ottiene:
) ( )
(Tr aT
ω
Tϖ
= ⋅ (1.34)dove
ϖ
è definita frequenza ridotta.In pratica, se G’(ω ,T) è riscalato secondo le equazioni sopra riportate, i dati
sperimentali cadono tutti sulla stessa curva (master curve) ottenuta alla temperatura di riferimento Tr. Sperimentalmente la quantità aT (shift factor) è ottenuta dalla
traslazione orizzontale necessaria per sovrapporre i dati ottenuti a qualunque T sulla curva dei dati ottenuti a Tr, mentre bT è legato allo shift verticale.
La validità del principio implica che gli shift factor siano gli stessi per tutte le proprietà viscoelastiche, quindi è sufficiente costruire la master curve con una delle funzioni per ottenere la curva di tutte le altre. Contemporaneamente alla costruzione della master curve, spesso si riporta in grafico l’andamento degli aT in scala
Capitolo 1: La reologia
Figura 1-9: costruzione della master curve
L’andamento con la temperatura dei fattori di shift è generalmente interpolata tramite due equazioni, la Williams-Landel-Ferry (WLF) e l’equazione di Arrhenius. Nel caso di materiali polimerici, la WLF generalmente fornisce un buon “fitting” dei fattori di shift in un intervallo di temperatura compreso fra la temperatura di transizione vetrosa Tg e Tg+ 200K:
( )
( )
C T Tr Tr T C T a T a r + − − ⋅ − = 2 ) ( 1 log (1.35)dove T [°C] è la T selezionata, Tr [°C] la T di riferimento, C1 e C2 sono costanti. La funzione di Arrhenius, generalmente impiegata sotto la temperatura di transizione vetrosa si esprime come:
− ⋅ = Tr T R E T a a 1 1 ) ( log (1.36)
Ea è l’energia di attivazione, R la costante reale dei gas.
Il fattore bT dovrebbe essere correlato alla variazione di densità del materiale con la temperatura; in realtà il termine ha scarsa validità teorica e in letteratura non sono
Capitolo 1: La reologia
impiegate equazioni che ne interpolano l’andamento, in quanto è influenzato anche dalla storia termica del materiale.
Le basi del metodo si fondano sulla teoria molecolare proposta da P.E. Rouse (J.Chem.Phys..1953), illustrata attraverso lo studio del moto di una sistema costituito da masse collegate a catene flessibili polimeriche, nel quale le masse subiscono gli effetti delle forze viscose [2]. Nel terzo capitolo sarà illustrata con maggiore dettaglio.
1.9 Viscometria
La valutazione delle proprietà viscoelastiche è uno dei due principali campi di studio della reologia; l’altro argomento di notevole interesse è la determinazione della viscosità del campione in esame, in condizioni di moto di scorrimento. In questa condizione il fluido si può immaginare come un sistema omogeneo costituito da strati di spessore infinitesimo, paralleli e sovrapposti (flusso laminare): la viscosità può essere misurata in funzione della forza necessaria per mantenere una differenza di velocità tra due strati adiacenti. Il fluido è contenuto tra due piani paralleli a distanza h, di cui uno fisso e l'altro che scorre a velocità v. La misura della viscosità deve essere sempre effettuata a flusso laminare, con velocità tanto più limitata, quanto minore è la viscosità da determinare. Nel moto turbolento, oltre una certa velocità critica, si possono generare vortici che provocano uno sbalzo improvviso nella resistenza allo scorrimento.
La viscosità, definita analiticamente nel paragrafo 1.2, è una funzione dipendente da cinque parametri:
• Struttura chimica
• Temperatura
• Pressione
• Storia reologica
Capitolo 1: La reologia
La viscosita’ ha le dimensioni di una pressione per un tempo e l’ unità di misura più usata nel sistema MKS Pascal·secondo [Pa·s], ma è tutt’ora molto impiegata anche il centipoise [cP].
La natura chimica e la temperatura sono parametri che influenzano sempre e in maniera determinante il valore della viscosità.
La pressione è un parametro la cui influenza sui liquidi diventa determinante soltanto quando raggiunge valori molto elevati; per i gas ed i vapori la dipendenza è più marcata, ma le misure di viscometria non riguardano i gas e generalmente sono condotte a pressione atmosferica.
La storia reologica, cioè le condizioni di sollecitazione al quale è stato sottoposto il campione prima della misura, è importante per alcuni fluidi quali le emulsioni o le sospensioni, la cui composizione può cambiare nel tempo.
Infine, prove condotte in condizioni isoterme possono essere influenzate dal
gradiente della velocità di scorrimento γ& se il materiale presenta un comportamento
non-Newtoniano:
Fluido newtoniano:
η
=costante Fluido non newtoniano: η =η(γ&)Per i fluidi non-Newtoniani la possibilità di valutare la viscosità del campione in esame dipende dalla cinematica del sistema di misura [3].
Secondo la distribuzione della cinematica possiamo avere:
• flusso viscometrico uniforme
• flusso viscometrico non uniforme
• flusso non viscometrico non uniforme
Se nel reometro si ha una cinematica uniforme, ossia γ& è la stessa dappertutto, le
misure forniscono direttamente la viscosità al fissato valore di shear rate.
Capitolo 1: La reologia
cioè la shear rate sia costante lungo la traiettoria della particella di fluido.
Nel caso di flusso non viscometrico non uniforme, la γ& varia in tutto il campo di
moto. I reometri con un flusso di questo tipo sono utilizzabili solo per fluidi Newtoniani.
Il tipo di cinematica del sistema di misura permette di suddividere i reometri in non
rotazionali e rotazionali.
Nel primo caso si hanno traiettorie aperte e quindi il flusso non è mai a regime; la mancanza degli effetti centrifughi permette di raggiungere elevate shear rate; questi tipi di reometri (a capillare, magnetici, a caduta di sfera…) sono adatti, per esempio, a determinare la viscosità di fluidi che devono essere vaporizzati e quindi sottoposti ad elevatissimi gradienti di velocità.
Nel secondo caso si hanno invece traiettorie chiuse e quindi in teoria si possono sempre raggiungere condizioni stazionarie; per contro occorre fare attenzione agli effetti inerziali della rotazione, cioè le forze centrifughe, e agli effetti di bordo, che limitano necessariamente la valutazione della viscosità a basse shear rate (<100 1/s). Sul reometro possono essere equipaggiati con geometrie diverse: per fluidi che presentano una certa consistenza anche a temperature medio alte, quali i bitumi, le più utilizzate sono il piatto-cono ed il piatto-piatto, dei quali è fornita nel seguito una breve descrizione della cinematica di flusso.
Una descrizione dettagliata delle procedure sperimentali per la misura delle proprietà viscose e viscoelastiche, delle geometrie utilizzate e delle problematiche connesse a ciascuna di esse sono riportate nel quarto capitolo.
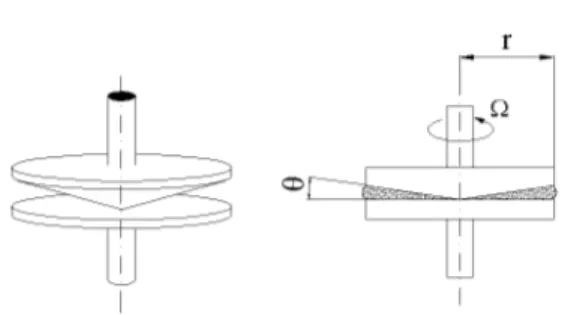
1.9.1 Geometria piatto-cono
La geometria piatto e cono (Figura 1-10) è una delle più utilizzate per gli studi di viscosità. E’ costituita da un piatto circolare e da un cono con conicità estremamente piccola (1°- 4°max); il campione è posto fra le due superfici, poste in rotazione l’una rispetto all’altra. In genere il piatto superiore è posto in movimento mentre quello
Capitolo 1: La reologia
inferiore è fermo. Le superfici di scorrimento sono superfici coniche di apertura variabile dalla superficie piana a contatto con il piatto inferiore a quella in contatto con il cono.
Figura 1-10: piatto e cono
Per ogni valore del raggio r la velocità di scorrimento è data dal rapporto fra la velocità del cono in movimento e la distanza fra i due piatti; la conicità estremamente bassa permette l’approssimazione:
θ θ θ ≅sin ≅
tg (1.37)
Chiamando la velocità angolare, è possibile scrivere:
θ
θ
θ
γ
=Ω ⋅ ⋅ Ω ≅ ⋅ ⋅ Ω = = r r tg r r h v & (1.38)Questa equazione permette di affermare che la shear rate è praticamente costante in tutto il campione. Questa considerazione è particolarmente importante perché implica che con il ricorso alla geometria piatto-cono è possibile valutare la viscosità di fluidi non-Newtoniani, il cui valore dipende cioè dalla shear rate.
Anche lo sforzo tangenziale sarà costante in tutto il campo di moto; la coppia M agente sul piatto si può scrivere come:
3 2 (2 ) 3 R M =
∫
r⋅ ⋅τ
π
rdr =π
⋅τ
(1.39) Sostituendo a τ l’espressione:Capitolo 1: La reologia θ η γ η τ = ⋅ &= ⋅Ω (1.40)
si ottiene l’equazione del reometro piatto-cono:
Ω ⋅ = η θ π 3 2 3 R M (1.41)
Occorre notare che per un dato valore della coppia di torsione lo stress aumenta con 1/r3; questo costituisce un vantaggio nelle prove con materiali di bassa viscosità: per tali materiali occorre applicare stress bassi per mantenere basse shear rate e la sensibilità dello strumento può essere determinante; in tal caso un raddoppio del raggio del cono porta ad aumentare di ben otto volte il valore dello stress misurabile. All’aumentare della shear rate il flusso di scorrimento diventa irregolare, specialmente per materiali che presentano un’elevata componente elastica. L’uso di questa geometria è limitato quindi sempre a basse velocità di scorrimento, alle quali gli effetti della forza centrifuga sono trascurabili. Di conseguenza nell’equazione del moto il termine inerziale può essere trascurato.
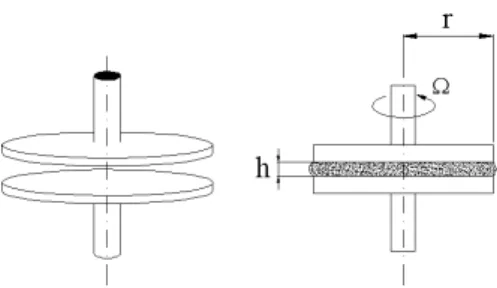
1.9.2 Geometria piatto piatto
Questa geometria non permette la misura diretta della viscosità per materiali non newtoniani poiché la velocità di scorrimento non è la stessa lungo tutte le superfici di flusso; infatti la distanza h fra i due piatti è costante e l’equazione della shear rate diventa: h r h v Ω⋅ = =
γ& → γ&=γ&(r) (1.42)
Di conseguenza per un fluido non-Newtoniano la viscosità varia dal centro alla superficie esterna del campione. E’ comunque possibile stimare con alcune tecniche di calcolo l’andamento della viscosità non lineare; inoltre, per piatti sufficientemente piccoli, l’approssimazione effettuata utilizzando tale geometria può essere
Capitolo 1: La reologia
considerata accettabile.