Capitolo 4
49
CAPITOLO 4
Definizione delle specifiche del sistema di controllo
4.1 Conclusioni sulle prove effettuate e specifiche del sistema di controllo da progettare
Alla luce dei risultati delle sperimentazioni descritte nel precedente Capitolo 3, è ora possibile cominciare a delineare la configurazione e le specifiche del nostro sistema di controllo.
• Un primo elemento importante derivante dalle sperimentazioni eseguite, è che il sensore di detonazione non può essere impiegato come sensore per la misura della dispersione ciclica. Infatti dalle misure eseguite non è stato possibile dedurre alcuna correlazione fra la sua uscita e quella della pressione nelle condizioni di funzionamento normale del motore.
• Un secondo punto di cui si è avuta conferma è che indipendentemente dal numero di giri e dal carico, per miscele sempre più povere si ha una crescita delle irregolarità cicliche che si traducono quindi in una variazione dell’energia trasmessa dallo stantuffo all’albero di ciclo in ciclo.
• Come discusso nel Capitolo 2, il carburatore elettronico fornitoci, permette un controllo del titolo solamente per bassi carichi, ovvero può essere controllato elettronicamente solo sul regime del minimo. Per carichi medio alti, il sistema di controllo non agisce e il carburatore funziona sfruttando il solo circuito del massimo senza alcun flusso d’aria supplementare.
• Per quanto concerne l’anticipo di accensione, questo deve seguire una opportuna curva di valori caratteristica per ciascun tipo di motore e dipendente dalla velocità di rotazione, che per i motori a quattro tempi è tipicamente una curva monotona crescente.
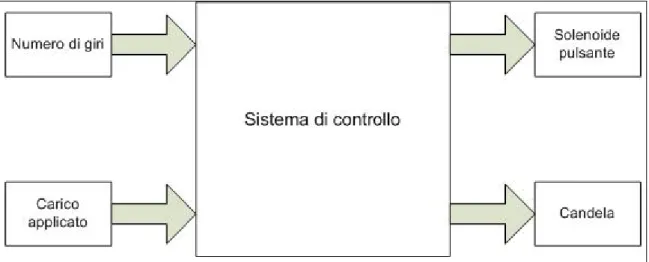
La configurazione del sistema completo, vedi figura 4.1, includerà quindi:
• Come attuatori il solenoide pulsante sul carburatore e la bobina di alta tensione per la generazione della scintilla tra gli elettrodi della candela. I parametri di controllo saranno quindi il flusso d’aria sul circuito del minimo e l’istante (angolo) di accensione della miscela.
Capitolo 4
50 • Come sensori il pick – up magnetico attraverso cui sarà possibile misurare
velocità ed angoli e un potenziometro analogico solidale con la valvola della farfalla del carburante, mediante il quale sarà possibile misurare il carico applicato.
• Come sistema elettronico di controllo un’architettura basata su microcontrollore, che è stato comunque impiegato nel progetto per consentire la sperimentazione di una nuova famiglia di componenti, anche se a valle delle sperimentazioni sul sensore di detonazione, avremmo potuto orientarci verso componentistica meno performante. Inoltre poiché il sistema è previsto evolvere a valle di successive sperimentazioni, questo componente è in grado di supportare ulteriori sensori e di eseguire le necessarie computazioni.
Figura 4.1 - Schema a blocchi del sistema di controllo da progettare
Le specifiche del sistema di controllo sono le seguenti: • Condizioni operative del motore:
o Velocità: 3000 giri/min
o Carico < 6 N.m (=50% della coppia max)
• Dispersione Ciclica ammessa: compatibile con una disuniformità massima di velocità del 5%, ovvero :