CAPITOLO QUINTO
LA NORMATIVA RELATIVA
ALLA GEOMETRIA STRADALE
La normativa che viene seguita nel definire la geometria del tracciato svolgendo i dovuti calcoli e le relative verifiche, è quella emanata con il decreto D.M. 05/11/2001 intitolata “Norme funzionali e geometriche per la costruzione delle strade”.
5.1 CLASSIFICAZIONE DELLE STRADE
Conformemente a quanto previsto all’art. 2 del “Nuovo Codice della Strada” (Decreto Legislativo 285/92 e successive modifiche ed integrazioni), le strade vengono classificate, con riguardo alle loro caratteristiche costruttive, tecniche e funzionali, nei seguenti tipi:
A - Autostrade (extraurbane ed urbane) B - Strade extraurbane principali
C - Strade extraurbane secondarie D - Strade urbane di scorrimento E - Strade urbane di quartiere
F - Strade locali (extraurbane ed urbane)
Ad ogni categoria di strada è associata una propria geometria ed un proprio intervallo di velocità di progetto.
Capitolo Quinto Normativa relativa alla geometria stradale
A partire da questa classifica si individuano quattro livelli funzionali di reti oltre ad un livello terminale:
a) Rete Primaria
E’ formata dalle strade classificate A, la cui funzione nel territorio è quella di assicurare i collegamenti a carattere nazionale ed interregionale, ovvero, nel caso di autostrade urbane, nell’intera area urbana. Sono a servizio di movimenti di transito o di scorrimento su lunghe distanze e vanno progettate con velocità medie di percorrenza elevate; su queste strade sono escluse alcune componenti di traffico (pedoni, veicoli a trazione animale, cicli, motocicli, ecc…).
b) Rete Principale
Vi appartengono le strade classificate B e D, il cui ruolo è quello di distribuire i flussi di traffico dalla rete primaria a quella secondaria ed eventualmente a quella locale (e viceversa). Le strade B provvedono essenzialmente ai collegamenti interregionali o regionali, mentre quelle D servono i collegamenti tra quartieri.
Le lunghezze degli spostamenti e le velocità medie di percorrenza sono normalmente inferiori a quelle della rete primaria; ed anche qui si escludono alcune componenti di traffico.
c) Rete Secondaria
Comprende le strade C ed E, le quali assicurano i movimenti di penetrazione verso la rete locale: le strade C esplicano la loro funzione territoriale a livello provinciale o interlocale, mentre le strade E svolgono lo stesso ruolo all’interno dei quartieri. Le
lunghezze degli spostamenti e le velocità medie risultano ancora minori e non vi sono limitazioni per le componenti di traffico. d) Rete Locale
Vi appartengono le strade F, aventi funzione essenzialmente di accesso (e di uscita, in senso inverso) e funzione territoriale interlocale e comunale, se in ambito extraurbano, ed interna al quartiere per quelle in ambito urbano.
Per esse si hanno entità degli spostamenti e velocità ridotte, senza alcuna limitazione alle componenti di traffico.
Infine, il livello terminale si identifica con le aree e le strutture previste per la sosta; questa funzione territoriale è sempre locale e sono ammesse tutte le componenti di traffico, salvo limitazioni specifiche.
Capitolo Quinto Normativa relativa alla geometria stradale
5.2 DISTANZE DI VISIBILITA’
L’esistenza di opportune visuali libere costituisce primaria ed inderogabile condizione di sicurezza della circolazione.
Per distanza di visuale libera si intende la lunghezza del tratto di strada che il conducente riesce a vedere davanti a sé senza considerare l’influenza del traffico, e condizioni atmosferiche e di illuminazione della strada. Lungo il tracciato stradale la distanza di visuale libera deve essere confrontata, in fase di progettazione, con le seguenti distanze:
• Distanza di visibilità per l’arresto: è pari allo spazio minimo necessario perché un conducente possa arrestare il veicolo in condizioni di sicurezza davanti ad un ostacolo imprevisto. Tale distanza è data dalla somma della distanza di frenatura S e dallo spazio percorso alla velocità V iniziale durante il tempo τ detto tempo complessivo di reazione necessario al conducente per percepire la presenza dell’ostacolo e per mettere in azione i freni. Per il tempo complessivo di reazione si assumono valori linearmente decrescenti con la velocità da 2,6 sec per 20 Km/h, a 1,4 sec per 140 Km/h, in considerazione della attenzione più concentrata alle alte velocità.
) , , (2 8 −0 01V = τ (sec) con V in Km/h
Detta D la distanza di visibilità per l’arresto, questa è data dalla relazione A seguente:
∫
+ + ⎥⎦ ⎤ ⎢⎣ ⎡ ± ⋅ + ⋅ = + = 1 0 V V 0 a 2 2 0 0 2 1 a V r m V R 100 i V f g V 6 3 1 6 3 V V D D D ) ( ) ( ) ( . . τespresso in metri, dove:
1
D spazio percorso nel tempo τ (m)
2
D spazio di frenatura (m)
0
V velocità del veicolo all’inizio della frenatura (km/h)
1
V velocità finale del veicolo, in cui V1= in caso di arresto (km/h) 0 i pendenza longitudinale del tracciato
τ tempo complessivo di reazione (sec) g accelerazione di gravità (m/sec²)
A
R resistenza aerodinamica (N)
m massa del veicolo (Kg)
T
f quota limite del coefficiente di aderenza impegnabile longitudinalmente
per la frenatura
0
r resistenza unitaria al rotolamento, trascurabile (N/Kg)
Con riferimento ad una autovettura media:
2 4
a 261 10 V
m
R = . × − × (N/Kg)
Per i valori di f possono adottarsi le due serie di valori di seguito T riportate, una relativa alle autostrade e l’altra valida per tutti i tipi di strade. Tali valori
Capitolo Quinto Normativa relativa alla geometria stradale
sono compatibili anche con superfici stradali leggermente bagnate (spessore del velo idrico di circa 0.5 mm)
Tabella 5.1 – Coefficienti di aderenza longitudinale proposti dalle Norme CNR
• Distanza di visibilità per il sorpasso: è pari alla lunghezza del tratto di strada occorrente per compiere una manovra di completo sorpasso in sicurezza, quando non si possa esclude l’arrivo di un veicolo in senso opposto. In presenza di veicoli marcianti in senso opposto la distanza di visibilità completa per il sorpasso si valuta con la seguente espressione:
V v
DS =20× =5.5×
dove:
v (m/sec) oppure V (km/sec) è la velocità di progetto desunta puntualmente dal diagramma delle velocità ed attribuita uguale sia per il veicolo sorpassante che per il veicolo proveniente dal senso opposto.
• Distanza di visibilità per il cambiamento di corsia: è pari alla lunghezza del tratto di strada occorrente per il passaggio da una corsia a quella ad essa adiacente
nella manovra di deviazione in corrispondenza di punti singolari (intersezioni, uscite,ecc.). lo spazio necessario si valuta con la seguente espressione:
V v
DC =9.5× =2.6×
dove:
v (m/sec) oppure V (km/sec) è la velocità di progetto desunta puntualmente dal diagramma delle velocità.
Le distanze di visibilità da verificare dipendono dal tipo di strada di progetto e dall’elemento di tracciato considerato. Indipendentemente però dal tipo di strada e dall’ambito (extraurbano o urbano), lungo tutto il tracciato deve essere assicurata la distanza di visibilità per l’arresto in condizioni ordinarie o con tempi di reazione maggiorati. Nelle strade extraurbane ad unica carreggiata con doppio senso di marcia (come il tipo “C”), la distanza di visibilità per il sorpasso deve essere garantita per una conveniente percentuale di tracciato, in misura comunque non inferiore al 20%. Nei tratti di carenza di visibilità per il sorpasso, tale manovra deve essere interdetta con apposita segnaletica. Ai fini delle verifiche delle visuali libere, la posizione del conducente deve essere sempre considerata al centro della corsia da lui impegnata, con l’altezza del suo occhio a 1.10 metri dal piano viabile. Nella valutazione della distanza di visibilità per l’arresto, l’ostacolo và collocato a 0.10 metri dal piano viabile e sempre lungo l’asse della corsia del conducente. Nel caso della distanza di visibilità per il sorpasso, l’ostacolo mobile va collocato nella corsia opposta, con altezza pari a 1.10 metri. Nel caso della manovra di cambiamento della
Capitolo Quinto Normativa relativa alla geometria stradale
corsia, deve essere verificata la possibilità di vedere il limite più lontano della corsia adiacente a quella impegnata dal conducente.
5.3 ANDAMENTO PLANIMETRICO DELL’ASSE STRADALE
Si definisce andamento planimetrico (o tracciato orizzontale) la proiezione dell’asse della strada su di un piano orizzontale.
Il tracciato orizzontale è costituito da elementi a curvatura costante (rettifili ed archi di cerchio), tra i quali vengono sempre inseriti elementi a curvatura variabile (curve di transito), lungo i quali generalmente si ottiene la graduale modifica della piattaforma stradale, cioè della pendenza trasversale, e, ove necessario, della larghezza.
5.3.1 RETTIFILI
Per evitare il superamento delle velocità consentite, la monotonia, la difficile valutazione delle distanze e per ridurre l’abbagliamento nella guida notturna, è opportuno che i rettifili abbiano una lunghezza Lr contenuta nel
seguente limite:
pMax
r 22 V
L = ⋅ [m]
Dove VpMaxè il limite superiore dell’intervallo di velocità di progetto della
strada, in km/h. Nello stesso tempo, le Norme stabiliscono che, affinché un rettifilo sia percepito come tale, deve avere una lunghezza non inferiore ai valori riportati nella Tabella 4.2 (le velocità ivi indicate sono quelle che si deducono dal diagramma di velocità per il rettifilo considerato).
Velocità
(km/h) 40 50 60 70 80 90 100 110 120 130 140
r
L minimo
Capitolo Quinto Normativa relativa alla geometria stradale
5.3.2 CURVE CIRCOLARI
Una curva circolare, per essere correttamente percepita, deve avere uno sviluppo corrispondente ad un tempo di percorrenza di almeno 2.5 secondi, valutato con riferimento alla velocità di progetto della curva.
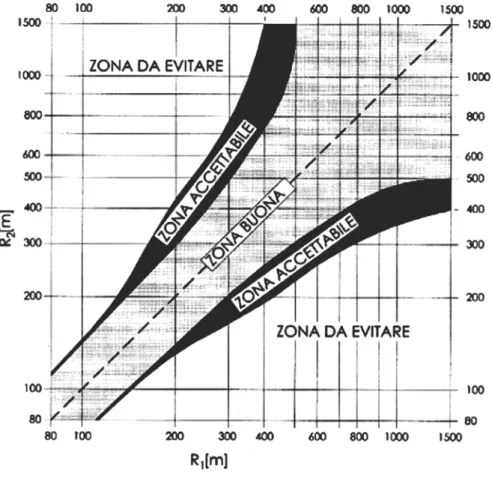
I rapporti tra i raggi R e 1 R di due curve circolari che, con l’inserimento di 2 un elemento a curvatura variabile, si succedono lungo il tracciato di strade di tipo A, B, C, D e F extraurbane, sono regolati dall’abaco riportato in Figura 5.3. In particolare, per le strade di tipo A e B, detto rapporto deve collocarsi nella “zona buona”; mentre per le strade degli altri tipi, è utilizzabile pure la “zona accettabile”.
Tra un rettifilo di lunghezza Lr ed il raggio più piccolo fra quelli delle due curve collegate al rettifilo stesso, anche con l’interposizione di una curva a raggio variabile, deve essere rispettata la relazione:
r L R > per Lr <300m m 400 R ≥ per Lr ≥300m
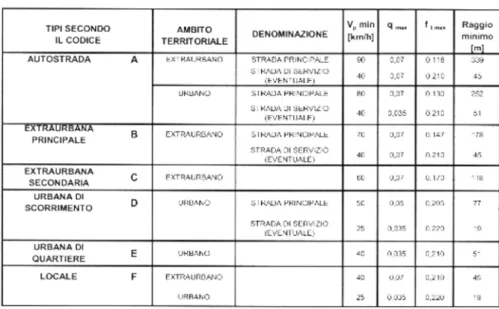
Il raggio minimo delle curve circolari si determina dallo studio dell’equilibrio di un veicolo transitante su una curva circolare; i valori ottenuti sono esposti in Tabella 4.3.
Tabella 5.4 – Valori dei raggi minimi per le varie categorie di strade secondo Norme CNR
Per normativa, al raggio minimo è associata la pendenza trasversale massima
MAX
q , che per le strade di tipo B e C è del 7%. In rettilineo o nelle curve a
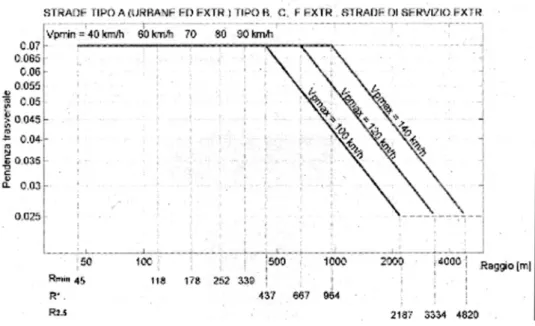
grandissimo raggio, la carreggiata stradale è composta da due falde, aventi pendenza trasversale del 2.5%. Per valutare la velocità e/o la pendenza delle curve circolari con raggi maggiori del minimo, si possono utilizzare gli abachi di Figura 5.5 e 5.6, in base al tipo di strada analizzata.
Capitolo Quinto Normativa relativa alla geometria stradale
Figura 5.5 – Abaco per il calcolo della pendenza e della velocità delle curve circolari, per le strade tipo A, B, C, F extraurbane e strade di servizio extraurbane.
Figura 5.6 – Abaco per il calcolo della pendenza e della velocità delle curve circolari, per le strade tipo D, E, F urbane e strade di servizio urbane.
5.3.3 PENDENZE TRASVERSALI DELLA PIATTAFORMA
In curva la carreggiata è inclinata verso l’interno. La pendenza trasversale è la medesima su tutto lo sviluppo dell’arco di cerchio.
Per strade di tipo C la pendenza massima è pari al 7%, ma per la sua determinazione in funzione del raggio è indispensabile stabilire il legame tra la velocità di progetto V , la pendenza trasversale in curva p iC e la quota parte del coefficiente di
aderenza impegnato trasversalmente fT . Dallo studio dell’equilibrio di un veicolo
transitante su di una curva circolare si ottiene (dal D.M. 05/11/2001):
t p f q R V + = ⋅ 127 2 (5.1) essendo V in km/h, R in metri e p q=iC/100.
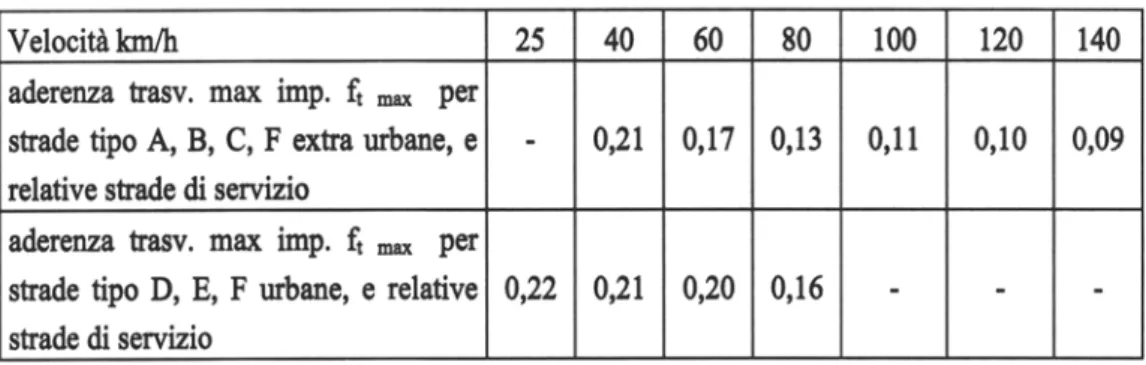
Per quanto riguarda ft la normativa riporta i valori di ftmax in corrispondenza
di certe velocità di progetto come riportato nella Tabella 5.1, precisando che i valori relativi a velocità intermedie a quelle considerate debbono essere ricavati per interpolazione lineare. La situazione è rappresentabile nel grafico che segue dove si riportano le equazioni delle due rete per l’interpolazione lineare. Di ciò si terrà conto in seguito per il calcolo delle clotoidi sul tracciato.
Comunque mediante l’equazione (5.1) è possibile ricavare, per il valore minimo della velocità di progetto Vpmin =60km/h, ed i rispettivi qmax =0.07 e
17 0
ftmax = . , il valore del raggio minimo in curva di una strada di tipo “C”, ottenendo m
118 Rmin = .
Capitolo Quinto Normativa relativa alla geometria stradale
Figura 5.7
Per i raggi maggiori di Rmin si utilizza l’abaco riportato nella Figura 5.6 del
paragrafo precedente, dove in ascissa abbiamo i valori dei vari raggi delle curve in scala logaritmica e in ordinata il corrispondente valore da assegnare alla pendenza trasversale
della piattaforma. Finché il raggio minimo è inferiore a quello R calcolato con *
l’espressione (5.1) inserendovi il valore della massima velocità di progetto Vmax, della
pendenza longitudinale massima imax e di ftmax, la pendenza trasversale dovrà essere
mantenuta costante e pari al valore massimo qmax. In tale campo, cioè per
* min R R
R < < , la velocità di progetto è data sempre dall’espressione (5.1 ) con ftmax.
Per valori di R >R* la velocità assume il valore massimo di progetto e la
pendenza trasversale decresce all’aumentare del raggio; tale andamento è rappresentato nella Figura 5.8 dove è riportata l’equazione che in quel caso lega la pendenza trasversale al raggio e che adotteremo nel calcolo delle clotoidi.
La pendenza trasversale minima qmin =2.5% deve essere adottata solo per
raggi maggiori o uguali a R2.5
Capitolo Quinto Normativa relativa alla geometria stradale
5.3.4 CURVE A RAGGIO VARIABILE (CLOTOIDI)
Le curve a raggio variabile devono essere inserite fra due elementi di tracciato a curvatura costante (due curve circolari od una curva circolare ed un rettifilo): lungo esse, infatti, si realizza il graduale passaggio della pendenza trasversale della piattaforma dal valore proprio di un elemento a quello relativo all’elemento successivo. Questo passaggio si ottiene facendo ruotare la carreggiata, o parte di essa, secondo i casi, intorno al suo asse ovvero intorno alla sua estremità interna. E’ preferibile che tale asse sia quello della carreggiata, perché ciò comporta un sollevamento minore del bordo esterno della piattaforma (è questo il caso delle strade tipo C). Per le strade a doppia carreggiata con larghezza dello spartitraffico minore di 4.00 metri, per evitare che questo acquisti una pendenza trasversale eccessiva, la rotazione avviene intorno al ciglio interno di ciascuna carreggiata (è questo il caso delle strade tipo B).
Le curve a raggio variabile sono progettate in modo da garantire:
• Una variazione di accelerazione centrifuga non compensata (contraccolpo) contenuta entro valori accettabili;
• Una limitazione della pendenza (o sovrapendanza) longitudinale delle linee di estremità della piattaforma;
• La percezione ottica corretta dell’andamento del tracciato.
La curva a raggio variabile maggiormente impiegata è la clotoide, che è una particolare curva della famiglia delle spirali generalizzate, definite dalla seguente equazione: 1 n n A s r ⋅ = +
s ascissa curvilinea nel punto P generico; A parametro di scala della clotoide;
n parametro di forma, il quale regola la variazione della
curvatura 1/r.
Per u valore di n=1 si ottiene l’equazione della clotoide:
2 A s r ⋅ =
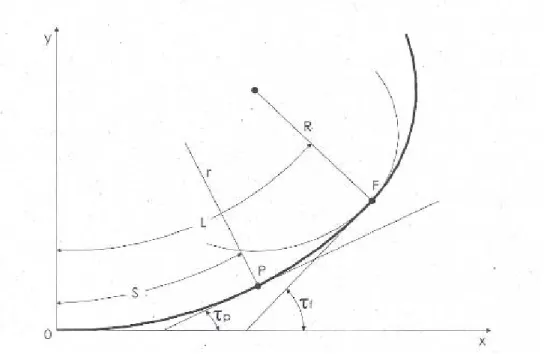
Gli elementi caratteristici della generica clotoide di parametro di scala A sono rappresentati in figura5.9:
Figura 5.9 – Andamento della clotoide di parametro di scala A dove:
F punto finale della clotoide;
R raggio dell’arco di cerchio da raccordare; L lunghezza dell’arco di clotoide;
p
Capitolo Quinto Normativa relativa alla geometria stradale
f
τ angolo di deviazione nel punto fine della clotoide.
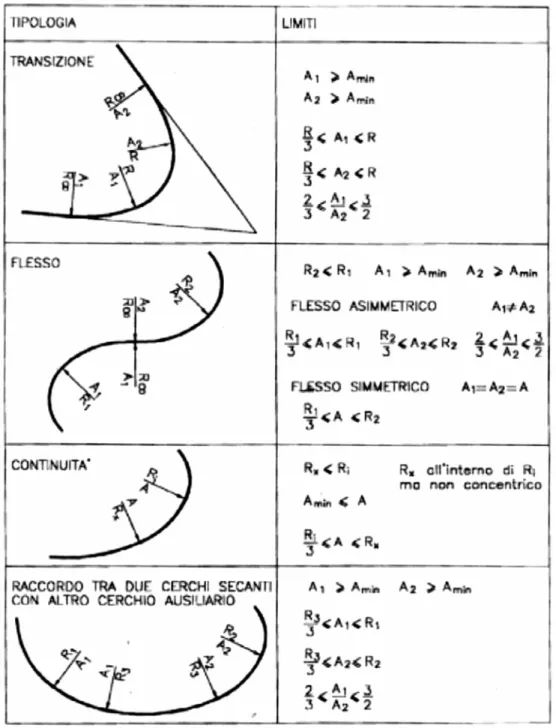
I casi più importanti nei quali la clotoide viene inserita in un tracciato sono riassunti nella Figura 5.10, dove sono anche indicate le limitazioni per i valori dei relativi parametri.
5.3.5 CALCOLO DEGLI ELEMENTI DI UNA CLOTOIDE
Si distinguono tre casi fondamentali, a cui possono ricondursi tutte le altre situazioni che si presentano nella realtà.
CLOTOIDE RETTIFILO – CURVA
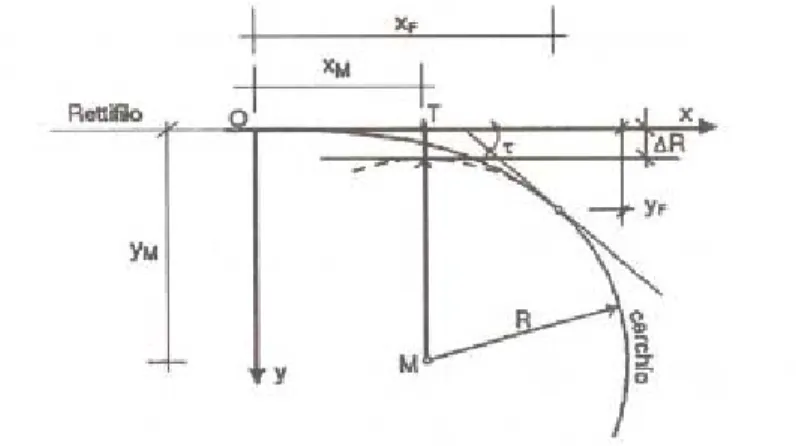
Generalmente è fissata la posizione del rettifilo e della curva (e quindi è noto lo scostamento ∆R con il rettifilo). Si tratta di individuare il parametro A e l’origine del sistema di assi a cui è riferita la clotoide.
Figura 5.11 – Inserimento di una arco di clotoide tra u rettifilo ed un cerchio
Se fissiamo il raggio R e lo scostamento ∆R del rettifilo coincidente con l’asse X, il parametro di scala A della clotoide e le varie grandezze rappresentate in figura si ricavano dalle seguenti espressioni:
Capitolo Quinto Normativa relativa alla geometria stradale A 24 R⋅ 3⋅∆R 1 3 14 ∆R R ⋅ +
⎛⎜
⎝
⎞
⎠
⋅⎡⎢
⎣
⎤⎥
⎦
1 4 := (5.2) τ A2 2 R⋅ 2 := (5.3) xp A 2 τ⋅⋅ 1 τ 2 10 − τ 4 216 +⎛
⎜
⎝
⎞
⎠
⋅ := (5.4) yp A 2 τ⋅⋅ τ 3 τ2 42 − τ 5 1320 +⎛
⎜
⎝
⎞
⎠
⋅ := (5.5) xM xp R sin τ:= − ⋅( )
(5.6) yM yp R cos τ:= + ⋅( )
(5.7)Ottenuto il parametro A, la curva si traccia, individuando in primo luogo l’origine O del sistema di assi cui essa è riferita: ciò si ottiene riportando lungo il rettifilo, a partire dal punto T, il segmento xM, che rappresenta l’ascissa del centro
del cerchio da raccordare. Fatto ciò, si possono riportare altri punti della curva, calcolati avvalendosi delle espressioni precedenti: le coordinate dei punti intermedi si determinano con le stesse espressioni usate per il punto F, sostituendovi a τ un valore
minore (
R 2
s =
CLOTOIDE DI FLESSO
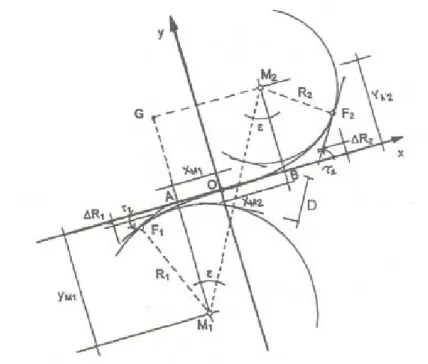
Si definisce “clotoide di flesso” il raccordo tra due archi di cerchio esterni l’uno all’altro e percorsi in senso opposto; esso è formato da due rami di clotoide con curvatura di segno opposto ed aventi in comune il punto O, in cui la curvatura è nulla (Figura 5.12):
Figura 5.12 – Inserimento di una clotoide di flesso
Nella stragrande maggioranza dei casi, i dati del problema sono i raggi R e 1
2
R (con R ≤2 R1) dei due cerchi da raccordare e la posizione relativa dei cerchi
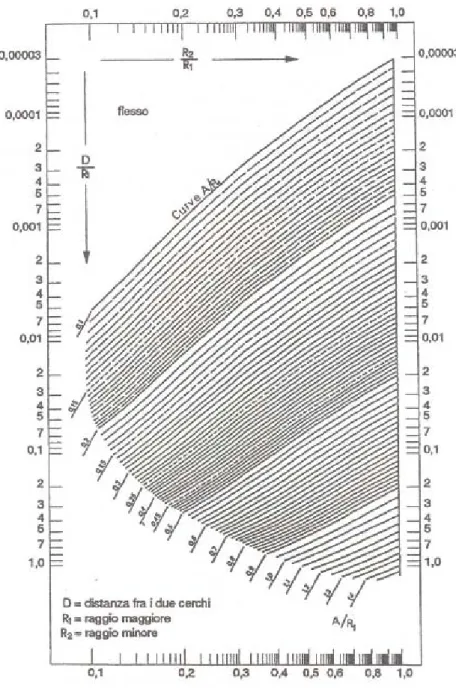
individuata dalla distanza D. Restano da determinare i valori dei parametri A ed 1 A 2
con A ≠1 A2 (oppure solo un parametro A1= A2 =A, se la clotoide introdotta è simmetrica) dei due rami di clotoide e la posizione del sistema di assi cui essi sono riferiti.
Capitolo Quinto Normativa relativa alla geometria stradale
Il generico parametro di scala A della clotoide si determina facilmente, avvalendosi del metodo di Osterloch: egli infatti, a partire dall’equazione:
(
)
(
) (
)
2 2 M 1 M 2 2 M 1 M 2 2 1 R D y y x x R + + = + + + (5.8)Ha calcolato la variazione del rapporto A/R1 in funzione delle due
variabili R2/R1e D/R1, ottenendo una famiglia di curve che consente di ricavare immediatamente il parametro di scala A.
Una volta calcolati i rapporti R2/R1e D/R1, si individua sull’abaco il punto che ha queste coordinate e la curva passante per quel punto (o la più vicina), che è caratterizzata da un numero che moltiplicato poi per R fornisce il cercato 1
parametro di scala A.
A questo punto occorre individuare il sistema di assi cui sono riferiti i due archi di clotoide; a tale proposito dalla Figura 5.9 si vede che la retta M1M2 forma
con la direzione dell’asse y un angolo ε il quale può essere agevolmente calcolato con la seguente espressione: ε atan xM1 xM2+ yM1 yM2+
⎛
⎜
⎝
⎞
⎠
:= (5.9) τ1 A2 2 R1⋅ 2 := (5.10) τ2 A 2 2 R2⋅ 2 := (5.11) x1 A 2 τ1⋅ ⋅ 1 τ1 2 10 − τ1 4 216 +⎛⎜
⎜⎝
⎞
⎠
⋅ := (5.12) x2 A 2 τ2⋅ ⋅ 1 τ2 2 10 − τ2 4 216 +⎛⎜
⎜⎝
⎞
⎠
⋅ := (5.13) y1 A 2 τ1⋅ ⋅ τ13 τ1 3 42 − τ1 5 1320 +⎛⎜
⎜⎝
⎞
⎠
⋅ := (5.14) y2 A 2 τ2⋅ ⋅ τ23 τ2 3 42 − τ2 5 1320 +⎛⎜
⎜⎝
⎞
⎠
⋅ := (5.15)Capitolo Quinto Normativa relativa alla geometria stradale
xM1 := x1 R1 sin τ1− ⋅
( )
(5.16) yM1 := y1 R1 cos τ1+ ⋅( )
(5.17) xM2 := x2 R2 sin τ2− ⋅( )
(5.18) yM2 := y2 R2 cos τ2+ ⋅( )
(5.19)Per il tracciamento della curva si possono allora riportare a partire da M e 1
2
M i segmenti M1A= yM1 e M2B= yM2 formanti l’angolo ε con la direzione
2 1M
M (come indicato in Figura 5.9), ottenendo così la direzione AB dell’asse x;
l’origine degli assi si ottiene riportando xM1 da A ovvero xM2 da B.
CLOTOIDE DI CONTINUITA’
Si definisce “clotoide di continuità” un arco di clotoide, che raccorda due archi di cerchio l’uno interno all’altro, ma non concentrici, percorsi nello stesso senso. Esso è formato da una porzione di clotoide, che inizia nel punto A con curvatura
1 R /
1 e termina nel punto B con curvatura 1/R2.
In analogia con quanto detto per la clotoide di flesso, generalmente i dati del problema sono i due raggi R e 1 R (con 2 R ≤2 R1) delle curve circolari e la distanza D tra i due cerchi, misurata lungo i centri delle stesse curve.
Come prima, il parametro A della clotoide si calcola facilmente, utilizzando un abaco opportuno, determinato da Osterloch appositamente per le clotoidi di continuità. Su di esso, infatti,una volta calcolati i rapporti R2/R1 e D/R1, si individua il punto che ha queste coordinate e la curva passante per quel punto (o la più vicina), che è caratterizzata da un numero che moltiplicato poi per R fornisce il 1
parametro A. Ciò che cambia rispetto alla clotoide di flesso è l’equazione risolutiva:
(
)
(
) (
)
2 1 M 2 M 2 1 M 2 M 2 2 1 R D y y x x R − − = − + − (5.20)Capitolo Quinto Normativa relativa alla geometria stradale
Figura 5.15 – Abaco per il calcolo del parametro A della clotoidedi continuità
Determinato il parametro A, si individua il sistema di riferimento della clotoide, calcolando l’angolo ε, che, riportato a partire dalla retta M1M2,
ε atan xM2 xM1− yM2 yM1−
⎛
⎜
⎝
⎞
⎠
:= (5.21) τ1 A2 2 R1⋅ 2 := (5.22) τ2 A 2 2 R2⋅ 2 := (5.23) x1 A 2 τ1⋅ ⋅ 1 τ1 2 10 − τ1 4 216 +⎛⎜
⎜⎝
⎞
⎠
⋅ := (5.24) x2 A 2 τ2⋅ ⋅ 1 τ2 2 10 − τ2 4 216 +⎛⎜
⎜⎝
⎞
⎠
⋅ := (5.25) y1 A 2 τ1⋅ ⋅ τ13 τ1 3 42 − τ1 5 1320 +⎛⎜
⎜⎝
⎞
⎠
⋅ := (5.26) y2 A 2 τ2⋅ ⋅ τ23 τ2 3 42 − τ2 5 1320 +⎛⎜
⎜⎝
⎞
⎠
⋅ := (5.27)xM1:= x1 R1 sin τ1− ⋅
( )
(5.28) yM1 := y1 R1 cos τ1+ ⋅( )
(5.29) xM2:= x2 R2 sin τ2− ⋅( )
(5.30) yM2 := y2 R2 cos τ2+ ⋅( )
(5.31)I segmenti M1E= yM1e M2F = yM2 individuano l’asse della ascisse x; mentre l’origine O si ottiene riportando, a partire dal punto E o dal punto F, rispettivamente la lunghezza xM1 o xM2.
Capitolo Quinto Normativa relativa alla geometria stradale
5.3.6 VERIFICHE DEL PARAMETRO DI SCALA DI UNA CLOTOIDE
Per una corretta progettazione, il parametro di scala A della clotoide deve soddisfare tre verifiche.
- Verifica 1: Limitazione del contraccolpo
Affinché lungo un arco di clotoide si abbia una graduale variazione dell’accelerazione trasversale non compensata nel tempo (contraccolpo c), fra il parametro di scala A e la massima velocità, V espressa in km/h, desunta dal diagramma delle velocità, per l’elemento di clotoide deve essere verificata la relazione:
2 V 021 . 0 A≥ ⋅ (5.32)
- Verifica 2: sovrapendanza longitudinale delle linee di estremità della carreggiata. Nelle sezioni di estremità di un arco di clotoide, la carreggiata stradale presenta differenti aspetti trasversali, che vanno raccordati longitudinalmente, introducendo una sovrapendanza nelle linee di estremità della carreggiata rispetto alla pendenza dell’asse di rotazione. Nel caso in cui il raggio iniziale sia di valore infinito (rettilineo o punto di flesso), il parametro deve verificare la seguente disuguaglianza:
(
i f)
i max min 100 B q q i R A A≥ = ⋅ ⋅ ⋅ + ∆ (5.33) Dove: i( )
% imax∆ sovrapendanza longitudinale massima della linea
costituita dai punti che distano Bidall’asse di rotazione
(in assenza di allargamento tale linea coincide con l’estremità della carreggiata);
100 i q ci
i = con ici pendenza trasversale iniziale, in valore
assoluto;
100 i
qf = cf con i pendenza trasversale finale, in valore cf assoluto.
Nel caso che anche il raggio iniziale sia di valore finito (caso di continuità), il parametro deve verificare la seguente disuguaglianza:
(
)
100 i R 1 R 1 q q B A A max f i i f i min ∆ ⋅ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − ⋅ = ≥ (5.34) Dove: iR raggio del punto iniziale della clotoide
f
R raggio del punto finale della clotoide
- Verifica 3: criterio ottico
Per garantire la percezione ottica del raccordo deve essere verificata la relazione:
3 / R
Capitolo Quinto Normativa relativa alla geometria stradale
Inoltre per garantire la percezione dell’arco di cerchio alla fine della clotoide, deve essere:
R
A≤ (5.36)
5.3.7 ALLARGAMENTO DELLA CARREGGIATA IN CURVA
Allo scopo di consentire la sicura iscrizione dei veicoli nei tratti curvilinei del tracciato, conservando i necessari franchi fra la sagoma limite dei veicoli ed i margini delle corsie, è necessario che nelle curve circolari ciascuna corsia sia allargata di una quantità E, data dalla relazione:
R K
E = (5.37)
Dove K =45ed R è assunto, se maggiore di 40 metri e nel caso di strade ad unica carreggiata a due corsie, pari al valore del raggio uguale a quello dell’asse della carreggiata. Comunque R è pari al raggio esterno della corsia espresso in metri.
Se poi l’allargamento E così calcolato risultasse inferiore a 20 cm, la corsia conserverebbe la larghezza del rettifilo.
Nel caso del raccordo clotoidici (rettifilo/curva), l’allargamento è parte 7,50 metri prima dell’inizio della curva di raccordo e termina 7,50 metri dopo il punto finale del raccordo. La lunghezza complessiva L del tratto di strade lungo il quale si effettua Z l’allargamento è L 50 . 7 2 LZ= × + (5.38)
Figura 5.16 – Allargamento della carreggiata per il raccordo rettifilo-cerchio
Nel caso di flesso per ciascun ramo del raccordo l’inizio del tratto di allargamento è anticipato di 7.50 metri rispetto al punto di flesso e termina di uguale misura dopo il punto finale della curva di raccordo; si ha quindi:
Capitolo Quinto Normativa relativa alla geometria stradale
Nel caso della clotoide di continuità la lunghezza L coincide con la Z lunghezza della clotoide:
Figura 5.18 – Allargamento in clotoide di continuità
Le figure seguenti mostrano in dettaglio la geometria dell’allargamento in curva:
Figura 5.20 – Variazione dell’allargamento della carreggiata
Il valore dell’allargamento ES al variare dell’ascissa curvilinea s si ottiene come rappresentato in figura 5.20 e dalle relazioni seguenti:
L 30 s E E 2 t S ⋅ ⋅ = per 0 ≤ s ≤ 15 m (tratto 1)
(
s 7.5)
L E E t S = ⋅ − per 15 m ≤ s ≤ L - 15 m Z (tratto 2)(
)
2 Z t t S L s L 30 E E E ⋅ − ⋅ − = per L - 15 m ≤ s ≤ Z L (tratto Z 3)Per semplicità di esposizione il calcolo dell’allargamento in curva si è riportato in apposite tabelle per ogni tratta del tracciato.
Capitolo Quinto Normativa relativa alla geometria stradale
5.4 VISIBILITA’ IN CURVA
Nel paragrafo 5.3.2 abbiamo parlato delle curve circolari e della valutazione dei raggi di tali curve. Adesso si rende necessario verificare e garantire la visibilità su tali raggi . In curva deve essere garantita la visibilità dell’asse della corsia perché così il conducente può venire da esso guidato e quindi potrà mantenere una traiettoria corretta; inoltre in curva deve essere sempre garantita la distanza di visibilità per l’arresto e, se vogliamo assicurare il sorpasso, anche la distanza di visibilità per il sorpasso.
5.4.1 VISIBILITA’ DEL CIGLIO INTERNO
Affinché un conducente che percorre una curva a velocità V veda il margine interno della corsia deve verificarsi che R >R0, essendo R0 il minimo valore del
raggio corrispondente alla velocità V.
Figura 5.21 – Grafico di calcolo del raggio in base al comportamento ottico del conducente
Nella Figura 5.21, A rappresenta la posizione dell’occhio del conducente, AD è la posizione della traiettoria curvilinea che deve essere vista quando l’occhio è accomodato alla distanza l0 con angolo della visione periferica 2 . Il valore di Φ R0si calcola con la seguente espressione:
( )
2Φsin l
R 0
0 = (5.39)
Sia l0che 2 dipendono dalla velocità (vedi figure che seguono). Φ
Figura 5.22 – Relazione tra la distanza di accomodamento e la velocità
Capitolo Quinto Normativa relativa alla geometria stradale
Tenendo conto dell’equilibrio in curva, per la strada di tipo “C”, il raggio minimo come si è detto è di 118 metri. Volendo garantire la visibilità del ciglio interno si ottiene un raggio minimo R0, per la velocità di V =60km/h, di:
m 290 lo = si ottiene R0 =296m o 78 2 =Φ
Un raggio di 118 metri può quindi essere inserito solo eccezionalmente nel tracciato di categoria C, il cui raggio minimo “non deve” scendere al di sotto di 300 metri. Anche se questo criterio per il calcolo del raggio di una curva circolare è comunque non tassativo (difatti, la Normativa vigente non lo contempla), nel nostro lavoro abbiamo introdotto, laddove si riteneva necessario e quando reso possibile, curve aventi raggio minimo di 300 metri.
5.42 VISIBILITA’ PER L’ARRESTO E PER IL SORPASSO
Il conducente di un veicolo che percorre un tratto in curva deve poter individuare un qualsiasi oggetto, che eventualmente venga a trovarsi sulla sua traiettoria, a una distanza tale da potersi arrestare. Deve quindi essere garantita sempre la distanza di visibilità per l’arresto, e quanto più possibile, nelle strade a due corsie, la distanza di visibilità per il sorpasso.
In curva, limitazioni alla visibilità possono derivare da ostacoli presenti all’interno della curva: quali muri, scarpate in trincea, barriere di sicurezza, siepi, ecc., e, nelle curve a sinistra, in galleria o nelle strade a doppia carreggiata, barriere di sicurezza e siepi antiabbaglianti.
Le norme precisano che tra gli ostacoli non vanno considerati i veicoli in colonna. Occorre precisare che deve trattarsi di ostacoli aventi un certo sviluppo o, al limite, continui: gli ostacoli isolati di piccole dimensioni (alberi isolati,pali, ecc. )non
rientrano in questo discorso. Indicando con Λ la distanza dell’ostacolo, con R il '
raggio in asse della corsia e con D la distanza di visuale libera che si vuole assicurare, si ricava: ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − × = ' ' R 2 D cos 1 R Λ (5.40)
Questa deve essere soddisfatta per D =DA e qualora si volesse consentire il
sorpasso in curva, anche per D =DS. Fermo restando che, in ogni punto del tracciato
(e quindi anche in curva) deve essere assicurata l’uguaglianza D =DA; per quanto riguarda il sorpasso in curva la relazione precedente garantisce la visibilità richiesta quando DSè minore della sviluppo della curva. In caso contrario si rende necessaria un
verifica grafica. Viceversa noti che siano Λ e R si può ricavare la distanza D '
disponibile dalla relazione precedente, arrestando lo sviluppo in serie del coseno al secondo termine, ottenendo:
Λ × × × =2 2 R' D (5.41)
Capitolo Quinto Normativa relativa alla geometria stradale
Nel nostro lavoro abbiamo garantito per tutto il tracciato la distanza di visibilità per l’arresto e quando possibile, anche quella per il sorpasso.
5.5 DIAGRAMMA DELLE VELOCITA’
È noto, che ad ogni strada, è associato un intervallo di velocità di progetto definito come “l’intervallo entro cui sono comprese, per ciascuna categoria di strade, le massime velocità che i veicoli possono mantenere con sicurezza in ogni punto quando la velocità è limitata dalla sola geometria”. Il limite superiore dell’intervallo,
max P
V , è la velocità che può tenersi in piano ed in rettifilo, mentre il limite inferiore,
min P
V , è la velocità con cui si progettano gli elementi più vincolanti.
Il diagramma delle velocità non è altro che la rappresentazione grafica della funzione V = f
( )
s , ossia dell’andamento della velocità in funzione della progressiva dell’asse stradale. Si costruisce, sulla base del tracciato planimetrico, calcolando per ogni elemento il valore della velocità.Il modello si bassa sull’assunzione delle seguenti ipotesi:
¾ Sui rettifili, sulle curve circolari con raggio non inferiore a
5 . 2
R e lungo le clotoidi la velocità tende al limite superiore dell’intervallo di velocità di progetto; gli spazi di accelerazione e di decelerazione, rispettivamente, in uscita o in ingresso ad una curva circolare ricadono negli elementi considerati spazio (rettifilo, curva con R >R2.5e clotoidi);
¾ Su tutte le curve circolari con raggio inferiore a R2.5la
¾ I valori dell’accelerazione e della decelerazione restano
determinati con un valore a =0.8m/sec2;
¾ Si assume che le pendenze longitudinali non influenzino la velocità di progetto.
La decelerazione termina all’inizio della curva circolare, mentre l’accelerazione comincia all’uscita della curva circolare; è a partire da questi punti, quindi, che vanno riportate le distanze di transizione.
Si definisce distanza di transizione D , lo spazio necessario per passare da un T
velocità V ad una velocità 1 V competenti a due elementi che si succedono. Tale 2 distanza, espressa in metri, si calcola con l’espressione:
(
2)
2 2 1 2 2 2 1 T 12,96 2 a 0.048V V V V D = − ⋅ ⋅ − = (5.42)Affinché il conducente possa effettuare la decelerazione è necessario che la curva sia percepita e vista come tale; per cui deve essere:
D
DT ≤ essendo D la distanza di visuale libera che precede la curva R
T D
D ≤ essendo D la distanza di riconoscimento R
Per distanza di riconoscimento s’intende la lunghezza massima del tratto di strada entro il quale il conducente può riconoscere eventuali ostacoli e avvenimenti.
R
D si calcola con l’espressione seguente:
P
R t v
Capitolo Quinto Normativa relativa alla geometria stradale con sec 12 t = P
v espressa in m/sec, riferita all’elemento di raggio maggiore.
Resta da specificare che il tracciato da noi proposto è inserito in un contesto di rete di infrastrutture esistenti alla quale sarà collegato attraverso l’inserimento di intersezioni a rotatoria. In corrispondenza di questa intersezioni, l’andamento delle velocità è stato valutato prescindendo dal modello: si è ipotizzato che la velocità decresca linearmente fino a zero (con uno spazio pari alla distanza di arresto) per poi ripartire con una velocità di 30 km/h all’uscita dell’intersezione, accelerando con una
accelerazione a =0.8m/sec2. Tale velocità è quella assunta per la percorrenza
dell’anello. Prove sperimentali hanno, infatti dimostrato che l’automobilista in fase di uscita tende a mantenere la velocità in rotatoria effettuando un breve rilascio dell’acceleratore in fase di impostazione della controcurva, manovra che produce una riduzione della velocità trascurabile, per poi accelerare appena imboccato il ramo di uscita.
5.6 ANDAMENTO ALTIMETRICO DELL’ASSE STRADALE
5.6.1 ELEMENTI DEL PROFILO ALTIMETRICO
Il profilo altimetrico è costituito da tratti a pendenza costante (livellette) collegati da raccordi verticali convessi e concavi.
Il valore massimo adottabile per le strade extraurbane secondarie (cat.C) è fissato dalla norma D.M. 05/11/2001 secondo la tabella seguente, pari al 7% e può essere aumentato di una unità qualora, da una verifica da effettuare di volta in volta, risulti che lo sviluppo della livellette sia tale da non penalizzare eccessivamente la circolazione, in termini di riduzione della velocità e della qualità del deflusso.
Capitolo Quinto Normativa relativa alla geometria stradale
5.6.2 RACCORDI VERTICALI
Devono essere eseguiti con archi di parabola quadratica ad asse verticale, il cui sviluppo viene calcolato mediante l’espressione:
100 i R
L = V ⋅ ∆ (5.44)
dove ∆i = i1−i2 è la variazione di pendenza in percento delle livellette da raccordare come mostrato schematicamente in fig. 5.26. RV è invece il raggio del
cerchio oscuratore, nel vertice della parabola, determinato come verrà esposto in seguito.
Figura 5.26 – Esempio di profilo altimetrico
L’arco di parabola da inserire tra due livellette ha la seguente equazione:
2 ax bx
a parametro della parabola V R 2 1 L 2 100 i a ⋅ = ⋅ = ∆ (5.46) 100 i b= 1 (5.47) V
R raggio in [m] del cerchio oscuratore nel vertice V della parabola
a 2
1
RV = (5.48)
L lunghezza in [m] dell’arco di parabola
100 i R
L = V ∆ (5.49)
In riferimento poi alla figura seguente si evidenziano le altre grandezze necessarie a definire la geometria di un raccordo verticale.
Figura 5.27 – Raccordi parabolici ad asse verticale
Si ha dunque:
D
x ascissa in [m] del punto a tangente orizzontale (punto più alto del dosso
Capitolo Quinto Normativa relativa alla geometria stradale V 1 1 D R 100 i L i i x = × = × ∆ (5.50) 2 D D 1 D x ax 100 i y = × − [m] (5.51) 2 V 100 i 8 R f ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = ∆ [m] (5.52)
Alle pendenze viene attribuito convenzionalmente un segno, positivo in salita e negativo in discesa.
È interessante notare che, d’altro canto, si potrebbe assumere come origine degli assi del sistema di riferimento rispetto la quale è definita l’equazione parabolica del raccordo, il punto terminale del raccordo stesso. Essendo in questo modo l’asse X orientato in verso opposto rispetto ai casi della Fig. 5.27 , può scriversi:
2 ' ax ' bx ' y = − (5.53)
Si rileva di conseguenza che i termini bx e 'bx rappresentano le quote di
progetto delle livellette, note dal profilo longitudinale, mentre i termini ax e 2 2
'
ax indicano quantità uguali per ascisse simmetriche rispetto all’ordinata intermedia, passante per il vertice V del raccordo (punto di incontro delle due livellette).
Pertanto ai fini del disegno dei raccordi verticali, la parabola può essere costruita sottraendo (nel caso dei raccordi convessi) o sommando (nel caso dei raccordi
concavi) alle quote di progetto le quantità 2 i i ax y =
∆ nel tratto dall’origine sino all’ascissa del vertice xv =L/2; nella seconda metà, come detto, le ∆yi risultano simmetriche.
Il valore minimo del raggio RV che definisce la lunghezza del raccordo deve essere determinato in modo che vengano rispettate le limitazioni:
1. RV ≥RV min=20m nei dossi
2. RV ≥RV min=40m nelle sacche
3. l’accelerazione verticale aV non superi il valore 2 lim 0.6m/sec a = cioè si abbia: lim V 2 P lim a R v a = ≤
essendo v la velocità di progetto della curva [m/s] desunta dal P diagramma delle velocità.
La norma fa presente che i raggi RV ottenibili dai criteri qui esposti
sono da ritenersi come minimi, dunque saranno adottati valori anche sensibilmente maggiori al fine di garantire una corretta percezione ottica del razziato.
Capitolo Quinto Normativa relativa alla geometria stradale
5.6.2.1 RACCORDI VERTICALI CONVESSI – DOSSI
Con riferimento alle distanze di visibilità da realizzare, il raggio minimo del raccordo verticale convesso viene determinato come di seguito.
Siano:
V
R raggio del raccordo verticale convesso [m]
D distanza di visibilità da realizzare [m]
i
∆ variazione di pendenza delle due livellette espressa in percento
1
h altezza sul piano stradale dell’occhio del conducente [m]
2
h altezza dell’ostacolo [m]
Si distinguono due casi:
• se D è inferiore allo sviluppo L del raccordo, D <L si ha:
(
1 2 1 2)
2 V h h 2 h h 2 D R × × + + × = (5.54) • Se invece è D >L si ha: ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + × × ⋅ − × = i h h 2 h h 100 D i 100 2 R 1 2 1 2 V ∆ ∆ (5.55)Si pone di norma h1 =1.10m. In caso di visibilità per l’arresto di un
veicolo di fronte ad un ostacolo fisso si pone h2 =0.10m. In caso di visibilità
valore di D , la lunghezza necessaria di RV rispettivamente quando m
10 . 1
h1 = ,h2 =0.10me h1 =h2 =1.10m. Di tali grafici possiamo avvalerci
giusto in prima approssimazione, per avere un idea di quale ordine di grandezza sarebbe il raggioRV ; il calcolo definitivo di RV verrà condotto mediante l’utilizzo di un foglio di calcolo elettronico appositamente allestito allo scopo.
Figura 5.28 – Abaco per calcolo raggio minimo raccordi convessi e dei dossi nelle strade a senso unico
Capitolo Quinto Normativa relativa alla geometria stradale
Figura 5.29 – Abaco per calcolo raggio minimo raccordi convessi e dei dossi nelle strade a doppio senso di marcia
5.6.2.2 RACCORDI VERTICALI CONCAVI – SACCHE
Con riferimento alla sola distanza di visibilità per l’arresto di un veicolo di fronte ad un ostacolo fisso ed in mancanza di luce naturale, il raggio minio del raccordo verticale concavo viene determinato come di seguito.
Siano:
V
R raggio del raccordo verticale concavo [m]
D distanza di visibilità da realizzare [m]
i
∆ variazione di pendenza delle due livellette espressa in percento h altezza sul piano stradale del centro dei fari del veicolo [m]
θ massima divergenza verso l’alto del fascio luminoso rispetto all’asse del veicolo
Si distinguono due casi:
• se D è inferiore allo sviluppo L del raccordo, D <L si ha:
(
h Dsinθ)
2 D R 2 V = ⋅ + (5.56) • Se invece è D >L si ha:(
)
⎥⎦⎤ ⎢⎣ ⎡ − + × × = θ ∆ ∆ i h D sin 100 D i 100 2 RV (5.57)In fig. 5.30 si riportano i valori di RV , avendo assunto h =0.50m e θ =1o, in un grafico tratto dalla vigente normativa.