CAPITOLO III
APPLICAZIONE SIMULATORI: SVILUPPO SENSORE
MULTIFUNZIONE
3.1 INTRODUZIONE
In questo capitolo viene descritto lo sviluppo di un sensore in grado di misurare i principali parametri caratteristici dei fluidi, quali pressione, temperatura e flusso idraulico. Tale studio viene qui riportato come applicazione degli strumenti di simulazione termica analitica sviluppati durante il corso di dottorato. In particolare il presente studio è stato condotto per mezzo di un programma di simulazione di tipo analitico (SLAB), semplificato rispetto al simulatore Djoser, che è in grado di fornire, in maniera rapida e diretta, le mappe termiche di una struttura multistrato, una volta note la distribuzione di potenza termica attiva e le condizioni al contorno convettive.
3.2 Principio rilevamento flusso idraulico
Il sensore multifunzione proposto per la prototipazione e la produzione in serie riunisce in sé tre diverse funzioni per il monitoraggio dei parametri dell’acqua nelle tubazioni e nelle reti di distribuzione idrica: pressione, temperatura e flusso. Si intende implementare tali funzioni sensoriali in modo integrato su un unico substrato di allumina, su cui gli elementi sensibili sono realizzati mediante la tecnica di deposizione
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
pressione è costituito da una membrana con un ponte resistivo) e non implicano il consumo di potenza elettrica ed il riscaldamento del substrato.
Di contro, la funzione di misura del flusso idraulico, integrata con le altre funzioni e realizzata in forma compatta con tecnologia ibrida, costituisce la parte più innovativa del progetto e, almeno nella forma in cui la si vuole realizzare, ancora da caratterizzare in modo accurato.
La sezione del sensore preposta alla rivelazione del flusso idraulico si basa sullo stesso principio dell’anemometria a filo caldo. Su di un resistore, avente la resistenza variabile con la temperatura e che quindi ne consente il monitoraggio, viene fatta dissipare una certa potenza. L’innalzamento di temperatura del resistore rispetto a quella ambiente dipende dalla resistenza termica tra il film spesso e l’ambiente circostante.
In particolare, se la trasmissione del calore avviene prevalentemente per scambio termico di convezione tra la superficie ed il fluido, vale la seguente relazione che lega la potenza generata P con la temperatura Tj di esercizio e con il coefficiente di scambio termico convettivo Hc.
P = A * Hc * (Tj – Ta) (1)
dove Ta è la temperatura del fluido lontano dalla parete ed A è l’area del resistore riscaldante.
Ora se con un meccanismo di controllo a retroazione si riesce a mantenere costante la differenza (Tj-Ta) variando opportunamente la potenza dissipata, ecco che il parametro elettrico P diventa di fatto la misura del coefficiente di convezione Hc.
La teoria ed i meccanismi fisici che governano lo scambio termico di convezione tra una parete ed un fluido sono ben conosciuti e sperimentati. In particolare è noto come il parametro Hc dipenda in modo complesso anche dalla velocità del fluido e dalla configurazione di moto dello stesso (laminare o turbolento). In breve, Hc ha in generale la seguente espressione:
Hc = Nu * k / L (2)
dove k è la conducibilità termica del fluido, L la lunghezza caratteristica ed Nu è il Numero di Nusselt. Nu a sua volta può essere espresso, tramite il Numero di Reynolds (Re) ed il Numero di Prandtl (Pr), alla velocità V del fluido ed al diametro D del condotto. Ad esempio, secondo la formula di SIDER – TATE, valida per i tubi tondi in regime turbolento si ha:
Nu = 0.023 * Re a *Pr b con a= 0.88 , b=0.33 (3)
Re = Numero di Reynods = V*D*µ /ν*Pr = Numero di Prandtl = cp*m / k (4)
dove µ è la densità del fluido, ν la viscosità e cp il calore specifico a pressione costante. Dalle relazioni (2) – (4) si evince che, una volta fissato il tipo di fluido e la geometria del condotto, il coefficiente di scambio Hc è una funzione diretta crescente della velocità del fluido. Tale funzione non può che essere valutata empiricamente, data la complessità dovuta ai regimi di flusso.
Il presente studio è dedicato quindi alla caratterizzazione della potenza elettrica P da dissipare nel resistore caldo al fine di mantenere costante il salto termico tra il resistore caldo ed il resistore freddo (sensore di temperatura del fluido). Come variabile indipendente è stato utilizzato soltanto il coefficiente di scambio termico convettivo Hc, lasciando alla caratterizzazione sperimentale il compito di ottenere una relazione diretta tra segnale elettrico e velocità del fluido.
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
Oltre a ciò, è necessario studiare l’effetto dei parametri termici del substrato (conducibilità termica, spessore, isolamento della faccia superiore verso l’ambiente esterno), valutare le migliori condizioni al contorno interne ed esterne per una maggiore sensibilità al flusso e rilevare eventuali difetti di comportamento o influenze reciproche tra le varie parti del sensore multifunzione.
3.3 Metodologia di analisi termica utilizzata
Lo studio delle distribuzioni di temperatura conseguenti al funzionamento del sensore multifunzione è stato condotto mediante un elevato numero di simulazioni termiche in regime stazionario. Per tale scopo, grazie anche alla semplicità geometrica della struttura del sensore, si è utilizzato un nuovo programma di mappatura termica basato su relazioni analitiche dirette ed esplicite anziché impiegare gli usuali strumenti di calcolo basati sul metodo agli elementi finiti, in generale più laboriosi dal punto di vista della costruzione dei modelli, costosi e che necessitano un tempo di calcolo maggiore Il programma utilizzato per tale studio è SLAB che, essendo basato su relazioni analitiche di tipo esplicito, risulta assai piu’ veloce e soprattutto molto piu’ facilmente programmabile e configurabile per tutte le situazioni di condizioni al contorno e strutturali del sistema termico planare. Queste caratteristiche rendono tale strumento estremamente utile e versatile per una rapida ed agevole previsione degli assetti termici in una ampia gamma applicativa dei sistemi elettronici e delle tecnologie ibride. Oltre a ciò, la sua e’ estremamente adatto ad interfacciarsi con altri programmi per la progettazione automatica di strutture elettroniche, fungendo da risolutore termico veloce.
Prove di confronto con i programmi agli elementi finiti hanno rivelato una accuratezza nel calcolo delle temperature praticamente coincidente e comunque dell’ordine dell’ 1 %.
Esso, come precedentemente descritto, partendo dalla risoluzione delle equazioni base del trasporto di calore, porta alla conoscenza dell’espressione della temperatura in ogni punto della lastra omogenea avendo come dato di ingresso la distribuzione superficiale
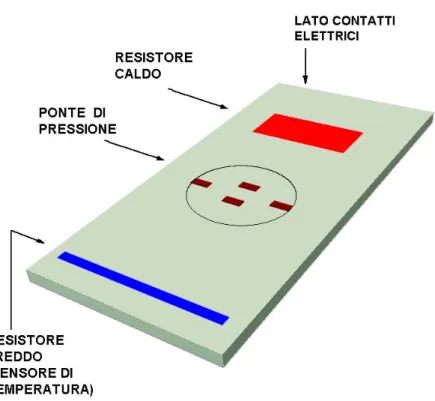
Nella figura 1 viene illustrata la struttura schematica del sensore realizzato su allumina con gli elementi sensibili alle grandezze fisiche dell’acqua.
La lastra di allumina, composta di tre strati presenta sulla superficie superiore i seguenti elementi.
RESISTORE FREDDO (in azzurro) : Una resistenza a film spesso ad alto TCR
necessario per la misura della temperatura del fluido. Su questo componente viene dissipata una potenza minore possibile in modo che la sua temperatura sia sempre uguale a quella del liquido sottostante.
RESISTORE CALDO (in rosso) : Questo componente, anch’esso ad alto TCR, è
pilotato dal sistema di controllo con una corrente tale da dissipare una potenza necessaria per mantenere costante la differenza di temperatura tra il resistore caldo e quello freddo. La potenza erogata costituisce appunto la misura del fattore convettivo e quindi della velocità del liquido.
PONTE RESISTIVO DI PRESSIONE : In posizione intermedia è inserito il sensore
di pressione costituito da una membrana e da quattro resistenze connesse in ponte. Tali resistenze devono essere comunque realizzate in film spesso a basso valore di TCR in modo da evitare gli sbilanciamenti di natura termica indotti dal resistore caldo.
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
Il coefficiente di conduzione termica del substrato in allumina ks è uguale a 20 W/m °C
Le dimensioni del substrato sono le seguenti:
Lunghezza mm 31
Larghezza mm 15
Spessore complessivo dei tre strati di allumina mm 0.9
L’isolamento tra i componenti resistivi sulla superficie e l’acqua è realizzato da uno strato di vetro di spessore pari a 15 microns e conducibilità termica 3 W/m °C.
FIG 1 Struttura del sensore multifunzione con i componenti resistivi a film spesso deposti sulla superficie superiore: il resistore freddo agente come sensore di temperatura (in azzurro), il resistore caldo per la misura del flusso (in rosso) e le quattro resistenze a basso TCR che formano il ponte di
3.4 Condizioni di esercizio
Il sensore è stato progettato per funzionare prevalentemente in presenza di acqua nelle seguenti condizioni:
Temperatura esterna dell’aria To 0 – 50 °C
Temperatura interna del fluido Ta 0 – 50 °C
Intervallo di fattore convettivo Hc da 100 (acqua ferma) a 20000
W/m2 °C
Un’altra importante condizione da rispettare riguarda la temperatura massima del resistore caldo che non deve superare i 95 °C, in modo da evitare che nei primi strati di fluido sopra il resistore non si generino fenomeni di ebollizione con conseguente formazione di bolle che potrebbero alterare il regime di flusso.
3.5 Modalità di montaggio del sensore
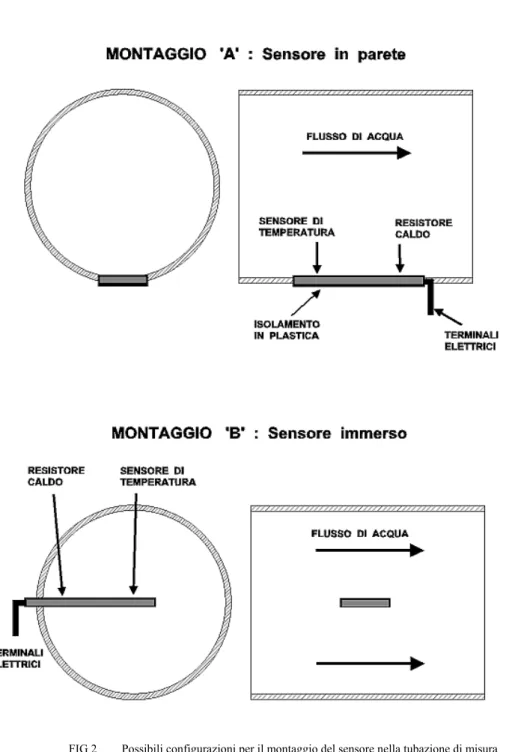
Lo studio di caratterizzazione teorica è stato condotto per due diverse configurazioni di montaggio del sensore all’interno della tubazione, illustrate nella figura 2.
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
Configurazione A : sensore in parete.
In questa modalità il sensore è posizionato lungo la parete del tubo. Esso possiede a contatto con il fluido soltanto la faccia superiore, su cui sono disposti i resistori a film spesso, mentre la faccia inferiore ricoperta dello strato di isolante di plastica è esposta
all’ambiente esterno. Il coefficiente di scambio termico di convezione tra l’esterno e la superficie inferiore del sensore è supposto pari a quello dell’aria ferma (8 W/m2 °C).
Configurazione B : sensore immerso nel fluido.
Nella seconda modalità di montaggio la lastrina del sensore viene posizionata all’interno della tubazione, ortogonalmente all’asse del tubo e con le due superfici principali parallele alla direzione della velocità dell’acqua in modo da perturbare il meno possibile il regime di flusso del liquido.
In questo caso la superficie inferiore non viene appositamente ricoperta di isolante plastico ( a meno di particolari esigenze di isolamento di tipo elettrico). Entrambe le superfici di allumina del sensore sono quindi esposte al fluido a temperatura Ta e lo scambio termico di convezione dovuto alla velocità del fluido agisce su entrambe le facce.
Nella trattazione della caratterizzazione termica che segue, i risultati saranno illustrati sempre ponendo insieme i grafici relativi alle due modalità di montaggio, in modo da consentire un immediato confronto tra le prestazioni.
3.6 Caratterizzazione termica : Strutture esaminate
Le prove di simulazione del sensore di flusso sono state condotte in un range di fattore convettivo da 100 a 20000 ed utilizzando dieci diversi campioni aventi un diverso valore dell’area del resistore caldo, da 0.5 a 50 mm2.
La distanza del resistore caldo dagli altri componenti della superficie è la massima possibile in modo da ridurre, per quanto possibile, il riscaldamento del sensore da parte del resistore caldo (cross-talk termico).
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
La forma del resistore caldo è fissa e rettangolare in modo da realizzare un valore prefissato medio di 5 ohm, indipendentemente dall’area totale.
L’esigenza di indagare anche il fattore area è determinata dalla sua influenza sulla sensibilità del sensore. Infatti, a parità di fattore convettivo Hc e di salto termico tra la superficie ed il fluido, l’area maggiore fa aumentare il flusso termico complessivamente asportato dal liquido, genera quindi un raffreddamento del resistore e quindi un aumento della potenza necessaria a mantenere contante il salto termico.
FIG 3 Layout delle strutture prese in esame per le simulazioni termiche. I vari campioni differiscono per l’area del resistore caldo.
3.7 Caratterizzazione termica : Temperatura a Potenza costante
Le prove di simulazione termica sono state condotte con le condizioni al contorno più critiche corrispondenti ad una temperatura del fluido di 50 °C ed una temperatura esterna di 0 °C.
Queste condizioni corrispondono da una parte ala massima sollecitazione termica dei componenti, dall’altra alla condizione di massimo scambio termico con l’ambiente esterno, fattore questo negativo in quanto si oppone alla sensibilità del sistema al flusso idraulico interno.
Il fatto che l’intero sistema può considerarsi termicamente lineare, consente un agevole calcolo delle temperature per diverse condizioni al contorno a partire dai dati ricavati. Le figure 4 e 5 illustrano, per i due tipi di montaggio, i grafici della temperatura massima di picco sul sensore caldo per una potenza dissipata costante di 1W in funzione del fattore di scambio convettivo. Le curve in alto si riferiscono ai campioni con le aree minori.
E’ possibile vedere come l’effetto della convezione dia luogo ad una diminuzione non lineare della temperatura massima ad andamento circa iperbolico. I grafici sono tendenzialmente asintotici al valore di 50 °C, temperatura assunta per il fluido sovrastante il sensore.
A causa della linearità del sistema termico, è possibile di contro ricavare, per mezzo della tecnica di interpolazione, i grafici della potenza necessaria a mantenere costante il salto termico a partire da questi dati e da quelli ottenuti utilizzando una potenza diversa.
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
FIG. 4 : Montaggio A : temperatura massima per potenza dissipata costante (1 W) in funzione del fattore convettivo Hc. Le curve in alto corrispondono alle aree minori.
FIG. 5 : Montaggio B : temperatura massima per potenza dissipata costante (1 W) in funzione del fattore convettivo Hc. Le curve in alto corrispondono alle aree minori.
3.8 Caratterizzazione termica : Potenza a salto termico costante
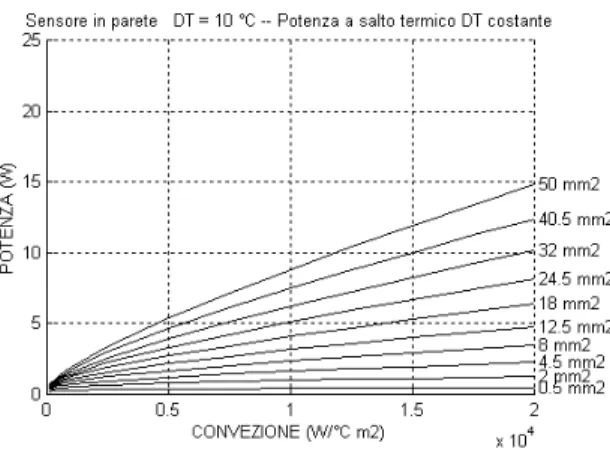
I grafici della potenza necessaria per mantenere un salto termico tra i due resistori pari a 10 °C, ottenuti dalle simulazioni termiche, sono illustrati nelle figure 6 e 7 in funzione del fattore convettivo e per tutti e dieci i valori dell’area del resistore caldo.
E’ da notare che i grafici sono stati ottenuti in modo che il salto termico di 10 °C si riferisca alla differenza tra le temperature MEDIE all’interno delle aree dei due resistori, e non rispetto alla temperatura del fluido. Questo per tener conto di un eventuale riscaldamento del resistore freddo da parte del resistore caldo.
Dall’esame dei grafici è possibile dedurre le seguenti proprietà.
Il grafico tra potenza e fattore convettivo ha un andamento di tipo non lineare, quadratico inverso; ovvero la sensibilità è maggiore per bassi valori del fattore convettivo e quindi per bassi flussi idraulici. Questo comportamento leggermente non lineare, potrà essere facilmente equalizzato elettronicamente con tecniche di elaborazione del dato elettrico acquisito dal sistema di controllo.
La sensibilità del sistema dipende in modo crescente dall’area del resistore caldo. Il montaggio di tipo B, ovvero con il sensore tutto immerso nel fluido, possiede una sensibilità maggiore del montaggio A (sensore in parete). Nella configurazione B la rimozione del calore prodotto è più efficiente (e quindi raffredda di più ) in quanto il fluido lambisce con lo stesso fattore convettivo sia la faccia superiore che quella inferiore. Nella configurazione A la faccia inferiore, opposta a quella esposta al fluido, scambia calore con l’aria esterna ferma (Hc=8 W/°C m2) attraverso l’isolamento plastico, per cui risulta praticamente adiabatica.
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
FIG. 6 : Montaggio A . Grafici della potenza necessaria a mantenere costante (10 °C) il salto termico tra il resistore caldo e quello freddo, in funzione del fattore convettivo.
FIG. 7 : Montaggio B. Grafici della potenza necessaria a mantenere costante (10°C) il salto termico tra il resistore caldo e quello freddo, in funzione del fattore convettivo.
A titolo di esempio nelle figure 8- 11 sono illustrate le mappe di temperatura per il sensore M5 (area resistore caldo 12.5 mm2) per due diversi valori del fattore convettivo, per entrambe le configurazioni e per una potenza dissipata sul resistore caldo atta a mantenere la differenza delle temperature medie pari a 10 °C.
Le figure 12 e 13 illustrano ulteriormente le due distribuzioni di temperatura prese lungo l’asse mediano verticale del sensore. Da queste figure si vede che, per le curve a Hc = 100 W/°C m2, ad ascisse intorno ai 2 mm, dove si colloca il resistore freddo che funge da sensore di temperatura del sistema, la temperatura si discosta da quella del fluido (50 °C). Questo fatto mostra un possibile difetto del sistema : per bassi valori del flusso idraulico la misura di temperatura e’ affetta da un sensibile errore, anche se rimane contenuto entro il 10 %.
FIG. 8 : Montaggio A : Mappa di temperatura del sensore M5 (area resistore caldo 12.5 mm2) per Hc = 100 W/°C m2 (acqua ferma) e per un DT=10 °C.
FIG. 9 : Montaggio B : Mappa di temperatura del sensore M5 (area resistore caldo 12.5 mm2) per Hc = 100 (acqua ferma) e per un DT=10 °C.
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
FIG. 10 : Montaggio A : Mappa di temperatura del sensore M5 (area resistore caldo 12.5 mm2) per Hc = 5000 W/°C m2 e per un DT=10 °C.
FIG. 11 : Montaggio A : Mappa di temperatura del sensore M5 (area resistore caldo 12.5 mm2) per Hc = 5000 W/°C m2 e per un DT=10 °C.
FIG. 12 : Montaggio A : Confronto tra le distribuzioni di temperatura lungo l’asse mediano verticale del sensore tra Hc=100 W/°C m2 (acqua ferma) e Hc=5000 W/°C m2 per il sensore M5 e per DT=10 °C.
FIG. 13 : Montaggio B : Confronto tra le distribuzioni di temperatura lungo l’asse mediano verticale del sensore tra Hc=100 W/°C m2 (acqua ferma) e Hc=5000 W/°C m2 per il sensore M5 e per DT=10 °C.
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
3.9 Caratterizzazione termica : Temperatura massima in
condizioni di esercizio.
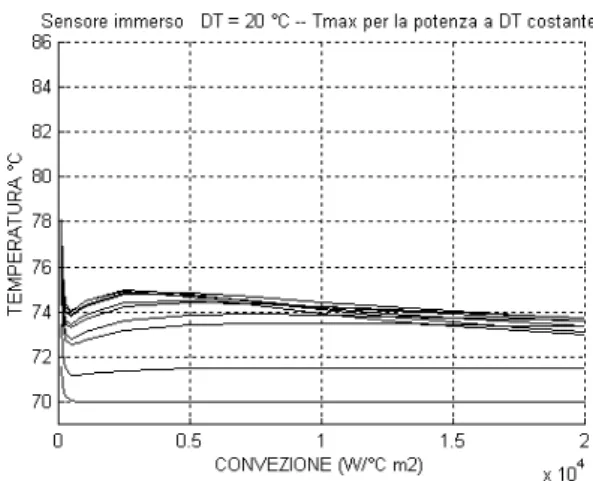
Le figure 14 e 15 illustrano per le due configurazioni rispettivamente, i grafici delle temperature massime di picco al centro del resistore caldo nelle condizioni di esercizio e per il salto termico di 20 °C. Come si vede, le temperature massime si mantengono abbondantemente al di sotto dei 95°C di specifica. La condizione più critica è ancora per un fattore convettivo corrispondente all’aria ferma, per il montaggio di tipo A e per i casi con maggiore area del resistore caldo. Poiché nel resistore caldo il surplus di valore della temperatura massima rispetto a quella media aumenta con la temperatura media stessa, e’ opportuno fissare a 20 °C il massimo del salto termico imponibile ai due resistori, almeno per le condizioni estreme di temperatura del fluido. (50 °C).
FIG. 14 : Montaggio A : temperatura massima di picco per salto termico costante (20 °C) tra i due resistori, in funzione del fattore convettivo Hc. Le curve in basso corrispondono alle aree minori.
FIG. 15 : Montaggio B : temperatura massima di picco per salto termico costante (20 °C) tra i due resistori, in funzione del fattore convettivo Hc. Le curve in basso corrispondono alle aree minori.
3.10 Caratterizzazione termica : Temperatura media del resistore
freddo
Come già evidenziato, il riscaldamento del resistore caldo e le corrispondenti mappe di temperatura comportano un riscaldamento del sensore di temperatura del sistema (resistore freddo), nonostante che questo sia stato posizionato il più lontano possibile Questo comporta da parte del sistema un errore in eccesso nella valutazione della temperatura del fluido, almeno per valori di fattore convettivo inferiori al 1000 W/°C m2.
I grafici della temperatura media del sensore di temperatura sono illustrati nelle figure 16 e 17 in funzione del fattore convettivo nel range 100-3000 W/°C m2.
L’eccesso di temperatura rispetto a quella del fluido risulta meno marcato nella configurazione B. Inoltre l’effetto risulta minore per le aree piccole e naturalmente tende a ridursi al diminuire del salto termico imposto. Ricordando come questi due ultimi fattori influenzano in senso crescente la sensibilità del sistema, ne consegue che è opportuno scegliere delle condizioni di progetto che non prevedano la massima sensibilità per contenere questo effetto negativo.
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
3.11 Caratterizzazione termica : Cross-talk termico sulle
resistenze del ponte di pressione
Le distribuzioni non uniformi di temperatura sulla superficie del substrato di allumina, conseguenti alla dissipazione di potenza sul resistore caldo, possono produrre dei gradienti termici in corrispondenza della sezione barometrica del sensore. Tali gradienti possono infatti produrre una differenza di temperatura tra le quattro resistenze che formano il ponte. Nel caso che queste siano realizzate con un film spesso avente un non-nullo TCR residuo, lo sbilanciamento termico può indurre un errore anche nella misura della pressione.
Il ponte è composto da due resistenze (R3 , R4) allineate orizzontalmente e poste in modo simmetrico rispetto all’asse verticale, ed da altre due (R2 , R5) poste in corrispondenza dell’asse ed allineate verticalmente. Tra le quattro resistenze, la coppia R3 e R4 non subiscono sbilanciamento di temperatura a causa della loro posizione simmetrica. La coppia R2 ed R5, pur essendo a distanza ravvicinata, può invece subire uno sbilanciamento termico ridotto.
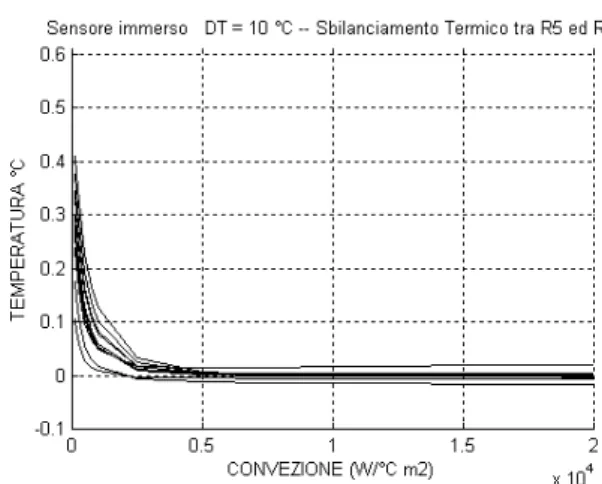
Le figure 18 e 19 illustrano la differenza tra le temperature medie di R2 e R5 in funzione del fattore convettivo e per i due montaggi considerati (DT = 10 °C). Come si vede, la differenza di temperatura non eccede 0.4 °C nel peggiore dei casi.
E' ancora opportuno rilevare che la configurazione di montaggio B con il sensore del tutto immerso risulta più vantaggiosa. Anche se il valore massimo dello sbilanciamento a bassi fattori convettivi risulta praticamente uguale nei due casi, tuttavia nel montaggio B la differenza di temperatura tende ad annullarsi per valori piu’ precoci del fattore convettivo.
FIG. 18 : Montaggio A : differenza di temperatura media tra i due resistori verticali del ponte barometrico per le condizioni di salto termico costante (10 °C), in funzione del fattore convettivo Hc.
FIG. 19 : Montaggio B : differenza di temperatura media tra i due resistori verticali del ponte barometrico per le condizioni di salto termico costante (10 °C), in funzione del fattore convettivo Hc.
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
3.12 Curve di sensibilità
Le figure 20 e 21 riportano le mappe di sensibilità minima del sensore (ovvero calcolata nell’estremo superiore del range di fattore convettivo considerato) in funzione dell’area del resistore caldo e per molti valori del salto termico imposto tra il resistore caldo e quello freddo.
La sensibilità, la quale consiste nel rapporto tra la variazione di potenza e la variazione di fattore convettivo, è espressa in [mm2 °C].
Da tali mappe si può vedere come il sensore consenta una ampia scelta a due gradi di libertà per la scelta dei parametri di progetto e per la determinazione della sensibilità della misura.
Anche da qui si vede come la configurazione B comporti in generale una migliore sensibilità a parità di condizioni progettuali.
FIG. 20 : Montaggio A : grafici della minima sensibilità (mm2 °C), per alti valori di Hc, in funzione dell’area del resistore caldo e per vari valori del salto termico.
FIG. 21 : Montaggio B : grafici della minima sensibilità (mm2 °C), per alti valori di Hc, in funzione dell’area del resistore caldo e per vari valori del salto termico.
3.13 Considerazioni finali e proprietà del sensore
Lo studio del sensore di flusso idraulico a film spesso, condotta per mezzo di simulazioni termiche in regime stazionario effettuate con il simulatore analitico SLAB di nuova concezione, ha pienamente confermato l’efficacia della tecnica utilizzata e delle scelte tecnologiche impiegate per il raggiungimento della rilevazione del flusso. L’esame teorico condotto in varie condizioni al contorno ha messo in luce per altro un'ampia possibilità di scelta del fattore sensibilità al coefficiente di scambio termico convettivo, sia in termini fissi (scelta dell’area del resistore caldo) che programmabili mediante il sistema di controllo elettronico (scelta del salto termico imposto tra i due resistori).
Le curve caratteristiche non sono caratterizzate da una perfetta linearità ma tale difetto può essere in ultima analisi facilmente compensato per via software.
In ogni caso il problema della scelta della sensibilità ottima dovrà essere necessariamente affrontato mediante scelte compromissorie. E' stato infatti rilevato che, all’aumentare dei fattori che innalzano la sensibilità, vengono ad aumentare anche i due difetti principali del sistema di misura che intervengono per bassi flussi idraulici : il riscaldamento del sensore di temperatura oltre il valore imposto dal flusso di acqua ed lo sbilanciamento termico tra le resistenze verticali del ponte di pressione.
Per quanto riguarda la scelta tra le due configurazioni di montaggio proposte, quella indicata con B è certamente la migliore. Il porre la lastrina di allumina totalmente immersa nel fluido fa in modo che anche la faccia inferiore sia lambita dal flusso idraulico, per cui l’ulteriore scambio termico convettivo inferiore coadiuva quello superiore alla rimozione del calore in eccesso e quindi alla sensibilità della misura. Oltre a presentare una maggiore sensibilità, il montaggio di tipo B possiede un migliore comportamento riguardo ai tre fattori negativi rilevati: la temperatura massima di picco
Capitolo 3: Strumenti di simulazione analitica: sensore multifunzione
Se la lastrina è posta sulla parete del tubo, questa viene lambita dal fluido nel primo strato laminare di flusso e dove la velocità è minima. Se invece il sensore fosse posto a taglio all’interno della tubazione, il resistore caldo sarebbe esposto al flusso turbolento del liquido in posizione maggiormente centrale. Quest’ultimo fatto comporterebbe una maggiore risposta elettrica anche se, in tal caso, si dovrebbe considerare una distribuzione non uniforme del fattore convettivo.