M
M
E
E
T
T
O
O
D
D
O
O
L
L
O
O
G
G
I
I
E
E
D
D
I
I
A
A
N
N
A
A
L
L
I
I
S
S
I
I
D
D
E
E
I
I
F
F
I
I
L
L
M
M
A
A
T
T
I
I
E
E
R
R
I
I
S
S
U
U
L
L
T
T
A
A
T
T
I
I
In questo capitolo verrà inizialmente fatto un accenno ai risultati ottenuti in alcuni importanti lavori effettuati (mediante una telecamera ad alta velocità) nei principali centri di ricerca internazionali (principalmente in quelli giapponesi). Nel seguito, dopo una breve descrizione delle modalità di svolgimento delle prove, verranno infine descritte le metodologie utilizzate per l’analisi dei filmati e i risultati cui queste hanno condotto.
5.1 Utilizzo della telecamera ad alta velocità in altri laboratori
La telecamera ad alta velocità è uno strumento utilizzato frequentemente nei lavori effettuati nell’ambito della ricerca sulla cavitazione. In passato, ed in particolare dall’inizio degli anni ’90 in poi, essa è stata utilizzata per diversi scopi: per la semplice osservazione di particolari fenomeni di cavitazione quali il collasso delle bolle (vedi per esempio [1] e [2]), per l’applicazione di tecniche di velocimetria del flusso cavitante (quali la cosiddetta PIV, particle image velocimetry [3], [4], [5], ecc.), per la misura della distribuzione del numero di bolle [6], e tanti altri ancora.
La caratterizzazione delle instabilità del flusso nelle turbomacchine, fatta mediante l’analisi delle fluttuazioni di pressione, può essere resa significativamente più efficace se accompagnata dalla visualizzazione del flusso mediante una telecamera ad alta velocità. Tale tecnica è stata infatti utilizzata con successo soprattutto nei laboratori giapponesi e, come si è visto nella Sezione 1.4, rientra anche tra gli obiettivi del presente lavoro di tesi. Tra i lavori effettuati dai ricercatori giapponesi nell’ambito del programma di sviluppo del motore principale (LE-7) del lanciatore H-II, meritano particolare attenzione quelli di Kamijo et al. [7], di Hashimoto et al. [8] e di Tsujimoto et al. [9].
In [7], infatti, dall’analisi delle fluttuazioni di pressione nella stazione d’ingresso dell’induttore viene sottolineata un’oscillazione supersincrona dovuta alla cavitazione rotante. Inoltre, l’analisi delle osservazioni del flusso, effettuate mediante una telecamera ad alta velocità, ha permesso ai ricercatori di ricavare (anche se per punti) l’andamento in funzione del tempo sia della lunghezza che dell’area della zona cavitante su ogni pala (Figura 5.1) dimostrando che l’oscillazione supersincrona riscontrata negli spettri della pressione in ingresso è dovuta proprio alle oscillazioni di lunghezza circonferenziale della cavità.
Figura 5.1 – Andamento della lunghezza e dell’area della zona cavitante in funzione del tempo su
ogni pala [7]
Tale oscillazione, oltre che dal grafico di Figura 5.1, può essere riconosciuta anche dalla semplice osservazione delle immagini riprese dalla telecamera (Figura 5.2).
Figura 5.2 – Oscillazione della cavità sulle tre pale in condizioni di cavitazione rotante [7]
In [8], l’analisi delle fluttuazioni di pressione ha portato all’individuazione di quattro tipi di instabilità: due modi di cavitazione rotante, cavitazione asimmetrica stazionaria e surge di cavitazione. Per quanto riguarda il primo dei due modi di cavitazione rotante, grazie ai filmati registrati mediante videocamera ad alta velocità, viene ricavata (grazie a un analizzatore fotografico) la fluttuazione dell’area delle cavità in funzione del tempo sulle tre pale (Figura 5.3). Sebbene questo grafico è affetto da errori dovuti all’oscurità della coda delle cavità, si vede chiaramente che l’oscillazione si muove nella stessa direzione di rotazione dell’induttore; tutto ciò dimostra che tale modo di cavitazione rotante è quello convenzionale (forward rotating cavitation).
Figura 5.3 – Fluttuazioni dell’area delle cavità sulle tre pale in condizioni di cavitazione
rotante [8]
Per il secondo modo di cavitazione rotante è stata ricavata (per punti) la variazione della lunghezza delle cavità in funzione del tempo (Figura 5.4). A tale grafico sono state poi sovrapposte sia delle sinusoidi relative al caso di cavitazione controrotante (Figura 5.4a), sia quelle relative al caso di cavitazione rotante convenzionale (Figura 5.4b). Osservando che i dati ottenuti dai filmati sono in miglior accordo con le sinusoidi di Figura 5.4a, si conclude che tale modo di cavitazione rotante è quello controrotante (backward rotating cavitation).
Figura 5.4 – Fluttuazioni della lunghezza delle cavità sulle tre pale in condizioni di cavitazione
rotante convenzionale (a) e controrotante (b) [8]
Nel lavoro effettuato da Tsujimoto at al. [9], dall’analisi delle fluttuazioni di pressione in ingresso (Figura 5.5), sono state individuate sette frequenze di oscillazione (i,ii,…, vii), le cui caratteristiche (in termini di frequenza e numero di celle) sono riassunte nella tabella presente in Figura 5.5.
Oltre alla suddetta analisi, grazie all’uso della telecamera ad alta velocità, i ricercatori furono in grado di fare le seguenti osservazioni:
• Nel filmato registrato nelle stesse condizioni in cui si verifica il modo i, si osservano cinque nuvole di cavitazione che si formano nei vortici di backflow presenti a monte della stazione d’ingresso dell’induttore. Queste nuvole ruotano molto lentamente a una velocità angolare pari a 0.16 volte quella di rotazione dell’induttore. Quindi la componente i è causata proprio da queste nuvole di cavitazione
• Nel filmato registrato nelle stesse condizioni in cui si verifica il modo iii, si osservano una cavità più corta e due cavità più lunghe che ruotano alla stessa velocità di rotazione del rotore. Si tratta quindi della cavitazione asimmetrica stazionaria già descritta nel Capitolo 2
• Mediante il filmato registrato nelle stesse condizioni in cui si verifica il modo iv, viene ricavata la lunghezza della cavità in funzione del tempo per le tre pale dell’induttore (Figura 5.6). Dal grafico si vede che l’oscillazione propaga nella stessa direzione di rotazione del rotore (infatti il punto di massimo delle “sinusoidi” passa dalla pala 3, alla pala 2 e infine alla pala 1) dimostrando che il modo iv rappresenta la cavitazione rotante convenzionale
• Nel filmato relativo al modo ii si ha una variazione delle dimensioni della cavità poco chiare. Data, però, la somiglianza delle caratteristiche di tale modo con i modi iii e iv, si pensa che si tratti della cavitazione controrotante (backward rotating cavitation)
• Nei filmati registrati nelle condizioni in cui si ha il modo v, si osserva un sistema di cavitazione composto da quella presente nello spazio tra l’estremità delle pale e il condotto trasparente contenente l’induttore (che, praticamente ruota alla stessa velocità di rotazione dell’induttore) e da quella presente nei vortici di backflow che ruota molto più lentamente dell’induttore. Quest’ultima è molto irregolare, quindi è impossibile determinarne il numero di celle e la velocità di rotazione dal filmato. Tuttavia si vede che essa non è inconsistente con i valori di numero di celle e frequenza di rotazione mostrati in Figura 5.5, quindi si pensa che anche questo modo sia dovuto ai vortici di backflow
• Anche nel caso in cui si ha il modo vi viene ricavata la variazione delle dimensioni della cavità su ogni pala in funzione del tempo (Figura 5.7). Dal grafico si vede che l’oscillazione avviene all’unisono per le tre pale e esattamente alla frequenza di 18 Hz. Essa provoca quindi il modo di oscillazione assiale denominato vi
Figura 5.6 – Andamento della lunghezza delle cavità su ogni pala in funzione del numero di
rotazioni dell’induttore in condizioni di cavitazione rotante [9]
Figura 5.7 - Andamento della lunghezza delle cavità su ogni pala in funzione del numero di
rotazioni dell’induttore in condizioni di surge [9]
Il calcolo della lunghezza della cavità su ogni pala per un induttore a quattro pale è stato effettuato, mediante una telecamera ad alta velocità, sempre nei laboratori giapponesi da Yoshida et al. [10]. In Figura 5.8 vengono mostrati i grafici ottenuti in condizioni di cavitazione di pala alternata, in cui si vede che la lunghezza media delle cavità su due pale è inferiore a quella delle altre due.
Figura 5.8 – Andamento della lunghezza della cavità in funzione del numero di giri per un
induttore a quattro pale in condizioni di cavitazione rotante [10]
Altro lavoro importante effettuato nei laboratori giapponesi in tempi recenti (nel 2004), è quello di Fujii et al. [11] in cui, dall’analisi delle fluttuazioni di pressione, si osservo la
presenza della cavitazione rotante di ordine superiore. Grazie alla videocamera ad alta velocità, si osservò in particolare che, a differenza della cavitazione rotante convenzionale, le fluttuazioni delle dimensioni delle cavità hanno un’ampiezza minore e avvengono non solo in direzione circonferenziale, ma anche in direzione normale rispetto alle pale.
si riporta, infine, il lavoro effettuato nei laboratori di ricerca francesi da Joussellin et al. [12] i quali hanno fatto uso di una videocamera per l’analisi delle cavitazione in un induttore. Sebbene la videocamera non fosse ad alta velocità, è importante menzionare tale lavoro sia perché, come già detto nella Sezione 4.2, viene effettuata un’elaborazione di immagini simile a quella effettuata nel presente lavoro, sia perché è uno dei pochi lavori presenti nella letteratura tecnica in cui vengono fatte delle riprese frontali di un induttore cavitante. Nel lavoro (Figura 5.9) vengono anche ricavati gli andamenti della superficie frontale della cavitazione presente attorno all’induttore sia in funzione del numero di cavitazione (per un particolare valore del coefficiente di flusso), sia in funzione del coefficiente di flusso (per un particolare valore del numero di cavitazione). Come si vede in figura, la superficie della cavità rimane praticamente costante al variare del numero di cavitazione, mentre decresce linearmente al variare del coefficiente di flusso.
Figura 5.9 – Principali risultati del lavoro di Joussellin et al. [12]
5.2 Le prove
Nell’ambito del presente lavoro è stata effettuata una lunga serie di prove consistenti nella registrazioni di filmati degli induttori cavitanti mediante la telecamera ad alta velocità. Come già accennato in precedenza, le registrazioni sono state riprese sia attraverso il condotto in plexiglass contenente l’induttore (“filmati laterali”), sia attraverso la specola visiva posta a monte della linea di aspirazione del circuito di prova (“filmati frontali”). I filmati laterali sono stati registrati sia per l’induttore FAST2 che per l’induttore FIP162, mentre i filmati frontali sono stati effettuati solo sull’induttore FIP (per i motivi già esposti nel Capitolo 3).
I filmati laterali sono stati registrati durante la prima fase del lavoro. Essi sono stati effettuati in tutte le condizioni di flusso consentite dal circuito (vedi Appendice C) e alle velocità di rotazione di 3000 rpm e 2000 rpm per gli induttori FAST2 e FIP rispettivamente. A differenza dei precedenti lavori di tesi ([13] e [14]), nei quali le prove per il calcolo dei waterfall plot erano state effettuate in maniera continua, in questo caso sono state effettuate in maniera discreta in quanto, come si è visto nel Capitolo 3, la
telecamera ha un tempo di registrazione limitato che, altrimenti, non avrebbe permesso di effettuare la registrazione dell’intera prova.
I filmati frontali sono stati registrati nella seconda fase del lavoro, in particolare dopo aver dotato la specola visiva del necessario accesso ottico. Diversi problemi di visibilità sono stati riscontrati durante la registrazione di questo tipo di filmati dovuti principalmente al non perfetto grado di pulizia dell’acqua. Questo problema è stato risolto inserendo nel circuito di prova un sistema di pulitura dell’acqua. Tale sistema è stato già descritto nel Capitolo 3 e i risultati del suo utilizzo sono mostrati in Figura 5.10 in cui viene fatto un confronto tra le immagini registrate prima e quelle registrate dopo il filtraggio dell’acqua: nella figura di sinistra l’induttore è, praticamente, invisibile.
Figura 5.10 – Immagini registrate prima (sinistra) e dopo (destra) il filtraggio dell’acqua
Anche nel caso dei filmati frontali le registrazioni sono state effettuate, in maniera discreta, in tutte le condizioni di flusso consentite (vedi Appendice C) dal circuito ad una velocità di rotazione di 1500 rpm. Come si vedrà meglio nella Sezione 5.3.1, non sono state effettuate prove a velocità superiori in quanto livelli di cavitazione troppo elevati comportano diversi tipi di problemi:
• non consentono l’uso dell’algoritmo di elaborazione delle immagini (non si riescono a distinguere le cavità sulle pale)
• portano alla formazione di un numero elevato di bolle d’aria che rimangono nel circuito e che, oltre al peggioramento della qualità dell’acqua, comportano lunghi tempi di degassamento tra una prova e l’altra
• i vortici di backflow che si formano ai bassi coefficienti di flusso e ai bassi numeri di cavitazione nel condotto di aspirazione non permettono di vedere l’induttore in maniera adeguata
Tutte le prove sono state effettuate attenendosi alla procedura seguente:
• filtraggio di circa due giorni dell’acqua del circuito in modo da assicurare un grado di “pulizia” accettabile (misurabile qualitativamente dalla qualità delle immagini registrate)
• degassamento dell’acqua prima di ogni registrazione in maniera tale da migliorare la non perfetta qualità delle immagini dovuta alla presenza di bollicine che si formano alla fine di ogni prova
• impostazione dei parametri della telecamera (messa a fuoco, apertura del diaframma, velocità di registrazione, risoluzione, ecc.)
• avviamento del motore e raggiungimento della velocità di rotazione prefissata • regolazione del valore desiderato di portata tramite l’azionamento manuale della
“silent throttle valve”
• regolazione del valore desiderato di pressione tramite il circuito di pressurizzazione/depressurizzazione: fissata la portata, viene dapprima pressurizzata la camera d’aria presente all’interno del serbatoio in modo tale da effettuare la prima prova alla pressione massima; per le prove successive la pressione viene progressivamente diminuita grazie alla pompa a vuoto
• accensione delle lampade alogene
• azionamento contemporaneo della registrazione del filmato (mediante il software Camlink [15]) e dell’acquisizione dei dati di pressione rilevati dai trasduttori (mediante il software Labview)
• lettura della temperatura di fine prova
Per quanto riguarda i parametri della videocamera, la velocità di registrazione è stata impostata a 1000 fps (40 fotogrammi per ogni giro a 1500 rpm), mentre la risoluzione a 640x480. La messa a fuoco e l’apertura del diaframma vengono, invece, impostate manualmente di volta in volta in funzione della qualità dell’immagine
5.3 Analisi dei filmati laterali per l’induttore FIP162
Dopo la prima serie di registrazioni effettuate sull’induttore FIP162 attraverso il condotto in plexiglas che racchiude l’induttore, i filmati sono stati osservati attentamente, mediante opportuni software che permettono la gestione dei filmati digitali, e si è cercato di trovare possibili oscillazioni delle cavità in maniera visiva.
Inizialmente si è cercato di osservare i filmati nel complesso, cioè fotogramma per fotogramma e si è cercato intuire l’evoluzione delle cavità. Tutto ciò, però, non ha portato a risultati di una certa rilevanza.
Tuttavia, in un secondo momento è stata utilizzata la seguente procedura: in ogni filmato viene individuato il primo fotogramma in cui è presente un’unica cavità sviluppatasi su una determinata pala (prima pala). A partire da questo fotogramma vengono poi estratti tutti i fotogrammi successivi in cui l’induttore occupa di nuovo la stessa posizione. In questo modo l’evoluzione della cavità presente su quella pala può essere compresa più facilmente, anche se si ha solo un fotogramma per ogni giro dell’induttore. Dopo aver fatto ciò, si passa al primo fotogramma in cui viene mostrata la cavità presente sulla pala successiva (seconda pala) e vengono estratti tutti i fotogrammi successivi in cui l’induttore occupa di nuovo tale posizione e così via anche per le altre pale dell’induttore. Tale procedura, noto il primo fotogramma contenente la prima cavità, può essere facilmente automatizzata (per esempio in ambiente Matlab) osservando che il numero di fotogrammi dopo il quale l’induttore occupa di nuovo la stessa posizione (
N
) può esserecalcolato se sono note la frequenza di rotazione dell’induttore stesso (Ω) e la velocità di registrazione della telecamera ( ); si ha infatti r
r N =
Ω
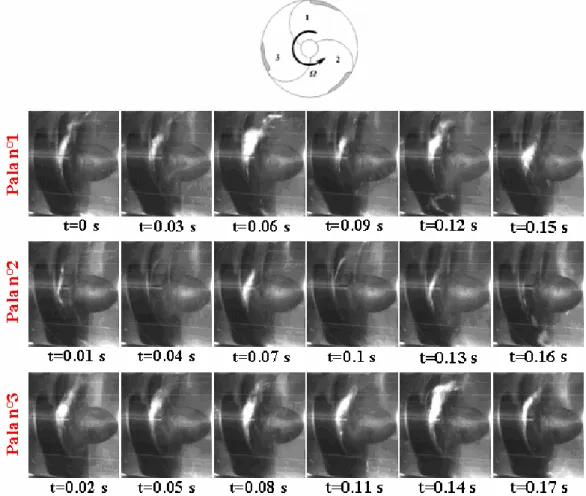
Applicando questa procedura ad un filmato registrato in determinate condizioni di flusso si hanno i risultati mostrati in Figura 5.11.
Figura 5.11 – Evoluzione temporale delle cavità presenti sulle pale dell’induttore
(
φ
=0.051, =0.34, =2000σ
Ω rpm)Se, ad esempio, si osserva l’evoluzione della cavità presente sulla prima pala si nota che questa ha, nel primo fotogramma, una certa dimensione. Nel secondo fotogramma (cioè al giro successivo dell’induttore) la cavità è più piccola mentre assume nuovamente le dimensioni caratteristiche del primo fotogramma al giro successivo. Questo comportamento si ripete anche nei fotogrammi successivi e può essere facilmente osservato anche nei fotogrammi relativi alla seconda pala e, anche se in maniera meno marcata, in quelli relativi alla terza pala.
Le dimensioni caratteristiche della cavità tendono dunque a oscillare nel tempo compiendo un periodo di oscillazione in circa 0.06 secondi (ovvero in due giri dell’induttore). A tale periodo, anche se calcolato in maniera molto approssimativa, corrisponde una frequenza di 16.6 Hz.
Un’altra caratteristica importante che può essere osservata in Figura 5.11 è la seguente: nei fotogrammi relativi alle tre pale presenti all’estrema sinistra in figura, le dimensioni
delle cavità sono, praticamente, quelle massime assunte durante il ciclo di oscillazione. In particolare si vede che questo massimo è presente sulla prima pala al tempo , sulla seconda al tempo e sulla terza al tempo
0 s
t
=
0.01 s
t
=
t
=
0.02 s
. Tutto ciò implica che l’oscillazione ruota in direzione opposta a quella di rotazione dell’induttore proprio alla frequenza di 16.6 Hz.Tale frequenza di rotazione è relativa ad un sistema di riferimento solidale alle pale. In un sistema di riferimento assoluto il suo valore, calcolato grazie al teorema di composizione delle velocità angolare (vedi Sezione 5.5.1), è di 16.7 Hz che corrispondono a circa 0.5Ω. In uno dei lavori di tesi precedenti [13], come si è visto nel Capitolo 2, era stato individuato, mediante l’analisi delle fluttuazioni di pressione, uno stallo rotante con una frequenza di rotazione di circa 0.34Ω. Considerando sia il fatto che la frequenza di 0.5Ω trovata in precedenza potrebbe essere affetta da errori (dovuti al fatto che l’induttore viene fotografato solo una volta in un giro), sia il fatto che le prove effettuate in [13] sono fatte a Ω=2500 rpm e non a Ω=2000 rpm come nel presente lavoro (non è detto che il valore 0.34Ω valga anche a 2000 rpm), si pensa dunque che lo stallo rotante sia dovuto proprio alle fluttuazioni delle dimensioni delle cavità.
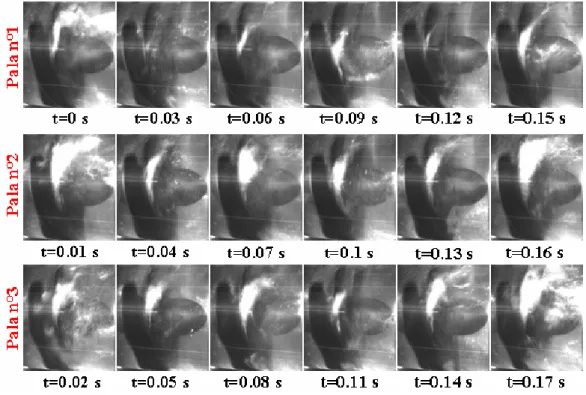
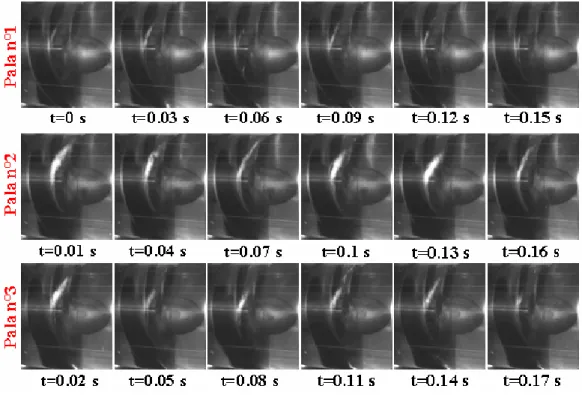
Un altro fatto che fa pensare a ciò è che, come lo stallo rotante in [13], anche le fluttuazioni delle dimensioni delle cavità sono state osservate per tutti i valori del coefficiente di flusso (vedi per esempio Figure 5.12 e 5.13) tranne che, come mostrato in Figura 5.14, per quello più alto (
φ
=0.06).Figura 5.12 - Evoluzione temporale delle cavità presenti sulle pale dell’induttore
Figura 5.13 - Evoluzione temporale delle cavità presenti sulle pale dell’induttore
(
φ
=0.034, =0.51, =2000σ
Ω rpm)Figura 5.14 - Evoluzione temporale delle cavità presenti sulle pale dell’induttore
(
φ
=0.06, =0.52, =2000σ
Ω rpm)5.4 Elaborazione e analisi dei filmati frontali
Come si è visto nel capitolo precedente, l’algoritmo di elaborazione delle immagini prende in ingresso un fotogramma che deve essere estratto dai filmati registrati mediante
la telecamera veloce. L’estrazione dei fotogrammi dai filmati può essere fatta in due modi: manualmente o automaticamente.
Nel primo caso bisogna utilizzare un software che permette la manipolazione dei filmati digitali con cui bisogna salvare manualmente ogni fotogramma che verrà poi elaborato mediante l’algoritmo. Chiaramente tale procedura richiederebbe un tempo molto lungo se il numero di fotogrammi da elaborare fosse elevato.
Fortunatamente alcuni software, quali ad esempio Matlab, sono dotati di codici che permettono, per l’appunto, l’elaborazione dei filmati digitali. Proprio Matlab è stato utilizzato, in questo caso, per lo sviluppo di un codice che permette di applicare in maniera completamente automatica l’algoritmo di elaborazione delle immagini a tutti i fotogrammi di un determinato filmato. Tale codice è presente nell’Appendice C.
Esso, oltre all’applicazione automatica dell’algoritmo, permette anche di ruotare i fotogrammi modificati di un angolo tale da far si che l’induttore occupi sempre la stessa posizione (cioè quella occupata nel primo fotogramma del filmato). Tale angolo può essere facilmente calcolato una volta che sono note la velocità di rotazione dell’induttore in rpm ( ) e la velocità di registrazione (o recording rate) della videocamera in fps ( ). Infatti si può dimostrare che l’angolo
Ω r
n
ϕ
(in gradi) di cui deve essere ruotato l’n-mo fotogramma del filmato è dato da:(
1)
6 con 1,2,3,...,n n n
r
ϕ
= − Ω = Ndove è il numero totale di fotogrammi del filmato. Come si vede dalla formula, il primo fotogramma ( ) non viene ruotato (
N
1
n
=
ϕ
1=
0
), mentre tutti gli altri fotogrammisono ruotati di un angolo pari a un multiplo dell’angolo di cui ruota l’induttore tra due fotogrammi successivi. Quest’ultimo angolo (se misurato in gradi) è dato appunto da
6
Ω
r
.Questa operazione è molto importante sia perché consente di capire meglio l’evoluzione delle cavità mediante la sola analisi ottica del filmato, sia perché ha permesso lo sviluppo delle tecniche utilizzate per il calcolo delle dimensioni delle cavità (principalmente in termini di lunghezza circonferenziale e superficie frontale) presenti sulle singole pale dell’induttore.
5.4.1 Stima e analisi della superficie totale delle cavità
La superficie frontale totale delle cavità presenti sulle pale dell’induttore ( ) viene stimata mediando il numero di pixels bianchi presenti nei vari fotogrammi dei filmati elaborati. Il valore di viene poi normalizzato con la superficie frontale dell’induttore ( cav
S
cavS
flow S ).Questa procedura è stata applicata a tutti i filmati a disposizione e ciò ha consentito di ottenere l’andamento della superficie frontale normalizzata delle cavità in funzione dei parametri caratteristici delle condizioni di flusso.
In Figura 5.15 viene mostrato, infatti, l’andamento di tale parametro in funzione del numero di cavitazione per diversi valori del coefficiente di flusso.
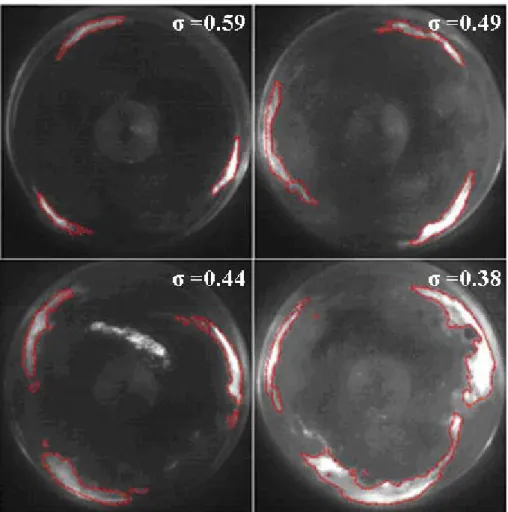
E’ evidente dalla figura che la superficie cavitante decresce all’aumentare del numero di cavitazione. Tutto ciò può essere facilmente spiegato osservando che all’aumentare del numero di cavitazione (si veda la definizione nella Sezione 1.3.3) aumenta la pressione del fluido all’ingresso nell’induttore e quindi sarà minore il livello di cavitazione che si sviluppa sulle pale. A conferma di ciò, in Figura 5.16 vengono mostrati quattro fotogrammi caratteristici dei filmati registrati nelle condizioni di flusso relative ai punti sperimentali presenti sulla curva celeste di Figura 5.15: è evidente il crescente livello di cavitazione al diminuire del numero di cavitazione.
Figura 5.15 – Andamento della superficie cavitante frontale normalizzata in funzione del numero
di cavitazione per diversi valori del coefficiente di flusso
Come si vede in Figura 5.15, le curve relative ai coefficienti di flusso più bassi si estendono solo fino a numeri di cavitazione relativamente alti rispetto alle altre curve. Ciò è dovuto al fatto che in condizioni di basso coefficiente di flusso e basso numero di cavitazione si ha la cosiddetta cavitazione di backflow. Come mostrato in Figura 5.17, tale forma di cavitazione porta alla formazione di vortici sia immediatamente a monte dell’induttore, sia all’interno del condotto di aspirazione che non permettono di vedere in maniera adeguata le cavità presenti sulle pale. In particolare i primi si presentano molto luminosi, i secondi sono invece scuri in quanto si vengono a trovare nella zona non illuminata del circuito. In tali condizioni l’algoritmo di elaborazione delle immagini risulta, pertanto, inutilizzabile.
Figura 5.16 – Sviluppo dell’area cavitante per un particolare coefficiente di flusso (
φ
=0.04)Figura 5.17 – Esempio di fotogramma che non può essere elaborato mediante l’algoritmo
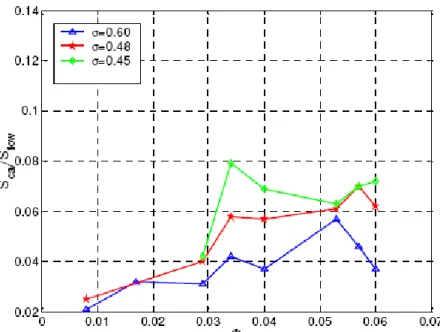
In Figura 5.18 viene, invece, mostrato l’andamento della superficie cavitante normalizzata in funzione del coefficiente di flusso per diversi valori del numero di cavitazione. Si può osservare, in particolare, che la superficie cavitante aumenta all’aumentare del coefficiente di flusso. Tale andamento è in disaccordo con il risultato trovato dai ricercatori francesi [12], secondo i quali, come si vede in Figura 5.9, la superficie cavitante normalizzata decresce linearmente all’aumentare del coefficiente di flusso.
Figura 5.18 - Andamento della superficie cavitante frontale normalizzata in funzione del
coefficiente di flusso per diversi valori del numero di cavitazione
L’andamento mostrato in Figura 5.18 è comunque in accordo con il cosiddetto modello a linea di corrente libera (free streamline method) proposto da Brennen e Acosta [16] che viene documentato anche in [17]. Secondo questo modello, il cosiddetto choked
cavitation number (
σ
c), definito come il minimo numero di cavitazione per cui la cavitàdiventa infinitamente lunga e al di sotto del quale il metodo non ammette soluzioni, è dato dalla seguente relazione:
(5.1)
2 2
1 sin
sec
sin
2 sin
1
2
2
2
2
b b b cd
α
β
β α
β
σ
= +
⎡
⎢
⎛ ⎞
⎜ ⎟
⎛
⎜
⎞
⎟
⎜
⎛
−
⎞
⎟
+
⎜
⎛
⎞⎤
⎟
⎥
⎝ ⎠
⎝
⎠
⎝
⎠
⎝
⎠
⎣
⎦
−
dove è il rapporto tra lo spessore della pala e lo spazio tra le pale dell’induttore,
d
β
b è l’angolo di pala, eα
l’angolo di incidenza.Dalla (5.1) si vede che il valore di
σ
c dipende, tra l’altro, dalle caratteristiche dell’induttore (β
b, ). In particolare se si riporta su un grafico l’andamento did
σ
c al variare del coefficiente di flusso si vede che la curva inizialmente cresce, ha un massimo per un certo valore del coefficiente di flusso e poi decresce ai coefficienti di flusso più alti. Facendo tutto ciò nel caso dell’induttore FIP si ha la curva mostrata in Figura 5.19. Come si vede in figura, l’induttore FIP presenta il massimo di tale curva per un valore del coefficiente di flusso pari a 0.08. Visto che le curve di Figura 5.18 sono ricavate per coefficienti di flusso inferiori a 0.08 e che il parametroσ
c è strettamente legato all’area delle cavità che si sviluppano sulle pale, il risultato di Figura 5.18 è dunque in accordo con il modello di Brennen-Acosta.Figura 5.19 – Andamento di
σ
c in funzione del coefficiente di flusso per l’induttore FIP 5.4.2 Calcolo della lunghezza e dell’area delle cavità su ogni palaCome si è visto nelle Sezioni 5.1 e 5.3, le fluttuazioni delle dimensioni delle cavità presenti sulle pale dell’induttore sono molto importanti, in quanto sono strettamente legate alle instabilità fluidodinamiche di cavitazione. Proprio per questo è stata sviluppata una procedura che permette, mediante l’uso dei filmati elaborati, di calcolare sia la lunghezza che l’area delle cavità presenti sulle tre pale dell’induttore.
Per spiegare tale procedura si può fare riferimento al fotogramma binario mostrato in Figura 5.20 ricavato mediante l’algoritmo di elaborazione delle immagini di cui si è parlato nel capitolo precedente (il confronto tra lo stesso fotogramma modificato e quello originale è mostrato a destra nella stessa figura).
Figura 5.20 – Fotogramma binario e relativo confronto con il fotogramma originale
La procedura consiste nello scansionare il fotogramma binario con un segmento che ha un estremo fisso nel centro dell’immagine (che coincide con il centro dell’induttore ricavato con l’algoritmo di elaborazione) e l’altro mobile lungo una circonferenza il cui raggio è
pari alla metà del lato dell’immagine. Tale segmento viene mostrato in Figura 5.21 nella sua posizione iniziale.
Figura 5.21 – Segmento con cui viene scansionata l’immagina binaria
Il segmento, in particolare, viene fatto ruotare in senso orario intorno all’estremo posto nel centro dell’immagine con un passo angolare di 1°. Andando a controllare, ad ogni passo della scansione, i valori dell’intensità dei pixels presenti sul segmento, si può determinare l’estensione angolare delle tre cavità. Infatti, supponendo di voler calcolare la lunghezza della cavità presente in alto a destra nell’immagine, si può fare la seguente osservazione: quando il segmento passa da una posizione in cui i pixels sono tutti neri (ovvero hanno tutti intensità 0) a una in cui c’è almeno un pixel bianco (ovvero che ha intensità 1), allora (Figura 5.22a) vuol dire che il segmento incontra l’inizio della cavità; se, invece, proseguendo la scansione, il segmento passa da una posizione in cui c’è almeno un pixel bianco a una in cui i pixels sono tutti neri, allora (Figura 5.22b) esso incontra la fine della stessa cavità. Se si calcolano gli angoli
θ
i eθ
f che il segmento spazza passando dalla posizione iniziale alle posizioni di inizio e fine della cavità rispettivamente (Figura 5.22), allora l’estensione angolare della cavità (Δ
θ
) può essere facilmente calcolata dalla relazionef i
θ θ
θ
Δ = −
(a) (b)
Figura 5.22 – Rilevamento degli angoli di inizio (a) e fine (b) della cavità
Proseguendo la scansione, la stessa cosa può essere fatta in corrispondenza delle cavità presenti sulle altre due pale. Il calcolo della lunghezza delle cavità ( ) viene infine
l
ceffettuato moltiplicando l’estensione angolare delle cavità per il raggio di estremità dell’induttore (
R
T). Si ha quindic T
l
=
R
Δ
θ
Non sempre le cavità sono ben definite nell’immagine binaria: in molti casi esse appaiono frammentate a causa del distacco di cavità più piccole da quelle principali. Un’immagine in cui si verifica tale situazione è mostrata in Figura 5.23 in cui viene evidenziata la cavità distaccata. In questi casi si è deciso di tenere conto della zona distaccata solo se è abbastanza vicina alla cavità principale: se la distanza angolare tra le due cavità è inferiore rispetto a un valore prefissato, allora vengono considerate come un’unica cavità, altrimenti la cavità distaccata non viene considerata come facente parte della cavità principale.
Figura 5.23 – Esempio di distacco di una piccola cavità da una principale
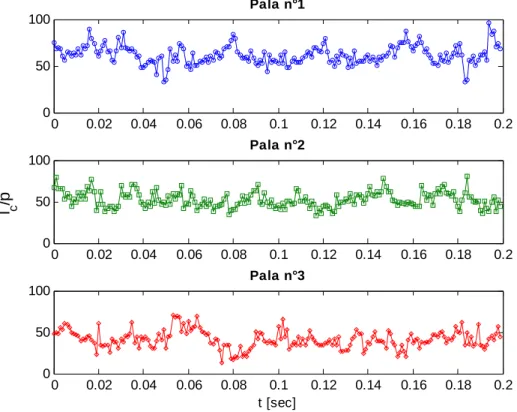
Tutta questa procedura è stata totalmente automatizzata e il codice Matlab che la implementa è stato allegato nell’Appendice C. Inoltre è stato sviluppato, sempre in ambiente Matlab, un codice che permette di applicare automaticamente la procedura a tutti i fotogrammi di un intero filmato. Anche questo codice è presente nell’Appendice C ed è proprio grazie a questo che si può ottenere la variazione della lunghezza delle cavità sulle tre pale in funzione del tempo. Nelle Figure 5.24 e 5.25 sono mostrati due esempi di grafici che riportano la lunghezza delle cavità sulle tre pale dell’induttore (normalizzata con il passo p dell’induttore) in funzione del tempo per determinate condizioni di flusso. Queste figure sono simili a quelle già trovate in passato dai ricercatori giapponesi (vedi Figura 5.8) anche se presentano un numero nettamente maggiore di punti sperimentali: nelle curve di Figura 5.8 è presente un solo punto sperimentale per ogni giro dell’induttore, nelle curve di seguito mostrate sono presenti quaranta punti per ogni giro.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 50 100 Pala n°1 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 50 100 l c /p Pala n°2 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 50 100 t [sec] Pala n°3
Figura 5.24 – Variazione della lunghezza delle cavità sulle tre pale in funzione del tempo
(
σ
=0.61, 0.034φ
= ) 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 50 100 150 Pala n°1 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 100 200 l c /p Pala n°2 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 100 200 t [sec] Pala n°3Figura 5.25 - Variazione della lunghezza delle cavità sulle tre pale in funzione del tempo
(
σ
=0.39, 0.053φ
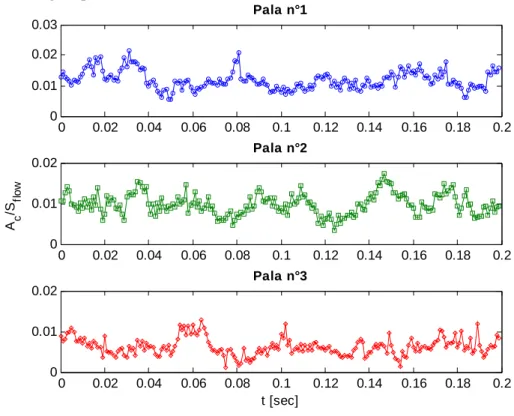
= )Oltre che il calcolo della lunghezza delle cavità, la suddetta procedura ha permesso anche di ricavare l’area delle tre cavità. Essa viene, praticamente, calcolata con lo stesso metodo utilizzato per il calcolo della superficie totale delle cavità. L’unica differenza è che, in questo caso viene contato solo il numero di pixels bianchi presenti tra gli angoli di inizio
e fine cavità calcolati in precedenza. Nelle Figure 5.26 e 5.27 viene mostrata la variazione dell’area delle cavità (anche in questo caso normalizzata con la superficie frontale dell’induttore Sflow) in funzione del tempo calcolata nelle stesse condizioni di flusso delle due figure precedenti.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.01 0.02 0.03 Pala n°1 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.01 0.02 A c /S fl o w Pala n°2 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.01 0.02 t [sec] Pala n°3
Figura 5.26 - Variazione dell’area delle cavità sulle tre pale in funzione del tempo
(
σ
=0.61, 0.034φ
= ) 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.02 0.04 0.06 Pala n°1 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.05 0.1 A c /S flo w Pala n°2 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.02 0.04 t [sec] Pala n°3Figura 5.27 - Variazione dell’area delle cavità sulle tre pale in funzione del tempo
5.5 Analisi spettrale: metodologia
Come dimostrano le ultime quattro figure, sia la lunghezza che l’area delle cavità oscillano, in maniera non molto chiara, attorno ad un certo valor medio. Le funzioni plottate in tali grafici possono essere considerate come dei segnali acquisiti da tre ipotetici trasduttori che misurano le dimensioni delle cavità istante per istante.
Per poter comprendere la natura di tali oscillazioni è dunque necessario analizzarle mediante l’analisi di Fourier. L’analisi effettuata in questo caso è molto simile a quella effettuata nei lavori di tesi precedenti per lo studio delle fluttuazioni di pressione.
In particolare, per la determinazione del contenuto in frequenza dei segnali viene utilizzato il modulo della trasformata di Fourier1 del segnale stesso (che permette di
calcolare il cosiddetto “spettro delle frequenze” del segnale); mentre per la determinazione della fase tra segnali provenienti da due “trasduttori” diversi si utilizza il cross-spettro che fornisce direttamente il valore della fase in funzione della frequenza. La procedura utilizzata per lo studio delle oscillazioni consiste, inizialmente, nell’analisi dei cosiddetti waterfall plot in cui vengono riportati in cascata gli spettri delle frequenze a vari numeri di cavitazione per un determinato valore del coefficiente di flusso. Tali diagrammi permettono di capire se i picchi presenti nello spettro a determinate frequenze siano presenti anche per diversi valori sia di Φ che di σ.
Individuate le frequenze fondamentali, si passa quindi all’analisi della fase della cross-correlazione tra i segnali acquisiti da trasduttori posti in diverse posizioni angolari. Tutto ciò, permette, in particolare di capire se un fenomeno oscillatorio ad una certa frequenza è un fenomeno assiale o un fenomeno rotante: nel primo caso la fase della cross-correlazione è praticamente nulla, mentre nel secondo si ha una fase diversa da zero. Nel caso di fenomeni rotanti è molto importante la presenza di più trasduttori posti in diverse posizioni angolari in quanto permettono di calcolare anche la frequenza di rotazione e il numero di celle. Infatti se, ad esempio, si avesse la presenza di due onde rotanti attorno all’induttore, la prima delle quali ad una cella e la seconda a tre celle, esse non potrebbero essere distinte da un unico sensore posto ad una certa posizione angolare
θ
se la frequenza di rotazione della prima fosse tripla di quella della seconda.Se si dispone di due sensori posti in due diverse posizioni angolari (
θ θ
e +Δθ
) non si ha tale problema. Supponiamo che il primo dei due sensori rilevi un fenomeno oscillante (p t
θ( )
) a frequenza Ω, allora si ha ad esempio( )
cos
( )
p t
θ=
Ω
t
Se il fenomeno è rotante, il secondo sensore rileverà lo stesso fenomeno sfasato rispetto a quello rilevato dal primo. Si avrà pertanto
( )
cos
(
(
)
)
cos
(
)
p
θ+Δθt
=
Ω + Δ
t
t
=
Ω +
t
ϕ
dove:• è la pulsazione con cui l’onda viene individuata nel sistema statorico (analisi spettrale)
Ω
1 Per le definizioni degli strumenti utilizzati per l’analisi dei segnali (quali la trasformata di Fourier
o la funzione di cross-correlazione) si rimanda ai lavori di tesi precedenti ([13] e [14]) o, per un’analisi più approfondita, a testi specialistici quali [18]
•
ϕ
= ΩΔt è la fase tra i due segnali (fase della cross-correlazione)•
è l’
intervallo di tempo che un punto dell’onda impiega a spostarsi da un trasduttore all’altro.t
Δ
t
Δ
può essere ricavato in funzione della velocità dell’onda ; si ha infattic
tc
θ
Δ Δ =
Ricavando
Δ
t
dall’espressione di
ϕ ed eguagliandolo all’ultima espressione
trovata
si ottienec
c
θ
ϕ
θ
ϕ
Δ
Δ
=
⇒
= Ω
Ω
che fornisce quindi la frequenza di rotazione dell’onda.
Il numero di celle coinvolto nell’onda può essere quindi determinato come il rapporto tra la frequenza di oscillazione (Ω
) e la frequenza di rotazione
del fenomeno ( ). Si ha dunquec
celle n cϕ
θ
Ω = = Δ5.6 Analisi di Fourier delle oscillazioni delle dimensioni delle cavità
5.6.1 Analisi delle oscillazioni di lunghezza
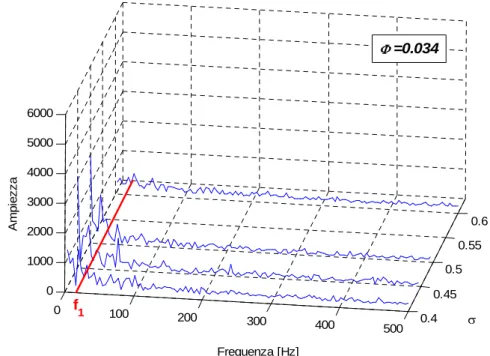
Dall’analisi dei waterfall plot relativi alle oscillazione della lunghezza delle cavità, come si vede ad esempio in quelli mostrati nelle Figure 5.28 e 5.29, è stato individuato, praticamente in tutte le condizioni di flusso analizzate, un picco alla frequenza
. 1
15.7 Hz
f
=
0 100 200 300 400 500 0.4 0.45 0.5 0.55 0.6 0 1000 2000 3000 4000 5000 6000 σ Frequenza [Hz] A m pi ez z a Φ =0.034 f 1Figura 5.28 – Waterfall plot per le oscillazioni della lunghezza delle cavità
0 100 200 300 400 500 0.4 0.5 0.6 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 σ Frequenza [Hz] A m pi ez z a Φ =0.053 f 1
Figura 5.29 - Waterfall plot per le oscillazioni della lunghezza delle cavità
(
φ
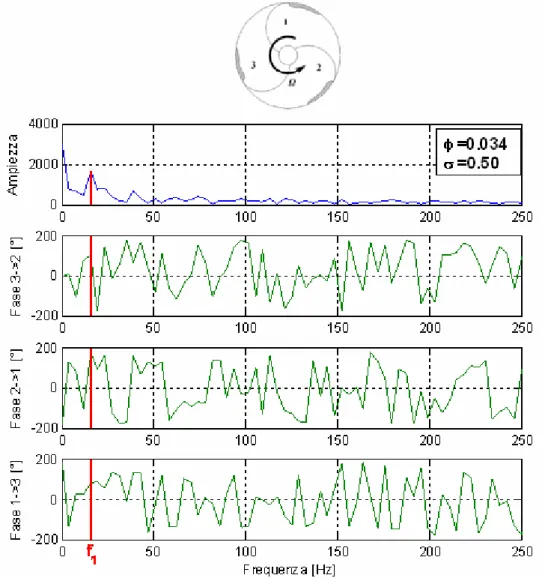
=0.053, 1500 Ω = rpm)Prendendo come riferimento una delle condizioni di flusso relative al waterfall plot di Figura 5.28 e andando ad effettuare un’analisi della fase della cross-correlazione tra i segnali ricavati sulle tre pale dell’induttore, si osserva (vedi Figura 5.30) che essa è diversa da zero. Il che implica che l’oscillazione alla frequenza
f
1 è un fenomeno rotante. Visto, inoltre, che il rapporto tra la fase della cross-correlazione e la separazione angolare tra le cavità sulle pale è, mediamente, all’incirca pari a uno, si osserva anche che il fenomeno ruota con una frequenza di rotazione esattamente uguale af
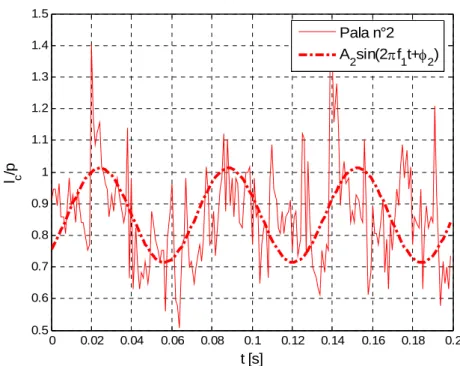
1 e coinvolge una singola cella.Nelle Figure 5.31, 5.32 e 5.33 sono mostrate delle sinusoidi, tutte alla frequenza
f
1, sovrapposte alle curve che rappresentano la variazione temporale della lunghezza delle cavità adimensionalizzata. In particolare la fase della sinusoide relativa alla terza pala (φ
3) è stata ricavata per tentativi, mentre per le altre due sono stati utilizzati i valori di fase ricavati dall’analisi della cross-correlazione (Figura 5.30).Figura 5.30 – Ampiezza della trasformata di Fourier della lunghezza della cavità sulla terza pala
(blu) e fase della cross-correlazione tra i segnali ricavati sulle tre pale(verde) (
φ
=0.034, =0.50, 1500σ
Ω = rpm) 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 t [s] l c /p Pala n°3 A3sin(2πf1t+φ3)0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 t [s] l c /p Pala n°2 A 2sin(2πf1t+φ2)
Figura 5.32 - Sinusoide alla frequenza
f
1 sovrapposta al segnale (l p
c ) ricavato sulla secondapala 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 t [s] l c /p Pala n°1 A1sin(2πf1t+φ1)
Figura 5.33 - Sinusoide alla frequenza
f
1 sovrapposta al segnale (l p
c ) ricavato sulla primapala
Mettendo insieme queste tre sinusoidi in un unico grafico, si ha il risultato mostrato in Figura 5.34. Da questo grafico si possono dedurre tre importanti informazioni:
1. il fenomeno rotante alla frequenza
f
1 ruota in senso orario: si nota infatti che il punto di massimo delle sinusoidi passa, nel tempo, dalla pala n°1 alla pala n°2 e infine alla pala n°32. l’ampiezza dell’oscillazione è maggiore su una delle tre pale (in questo caso per la terza)
3. la lunghezza media di una delle tre cavità (sempre la terza in questo caso) è inferiore rispetto alle altre due: ciò suggerisce la presenza della cavitazione asimmetrica stazionaria. 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 t [s] l c /p Pala n°1 Pala n°2 Pala n°3
Figura 5.34 – Oscillazioni della lunghezza delle cavità alla frequenza
f
1 sulle tre paledell’induttore (
φ
=0.034, =0.50, 1500σ
Ω = rpm)E’ importante osservare che la frequenza di rotazione
f
1 è calcolata in un sistema di riferimento solidale alle pale. Il valore della stessa frequenza di rotazione in un sistema di riferimento assoluto (cioè solidale al laboratorio) può essere calcolato grazie al teorema di composizione delle velocità angolari. Secondo tale teorema si ha infatti:ass rel
ω
G
=
ω
G
+ Ω
G
(5.2)dove
ω
G
ass è la velocità angolare nel sistema di riferimento assoluto,ω
G
rel quella in un sistema di riferimento relativo (nel nostro caso quello solidale alle pale) e Ω è la velocità angolare di trascinamento (nel nostro caso quella di rotazione dell’induttore).G
Lo stesso teorema può essere utilizzato anche nel caso delle frequenze di rotazione: queste ultime sono infatti uguali alle velocità angolari a meno di un fattore
2
π
.Considerando il fatto che la (5.2) è un’equazione vettoriale e considerando positive le rotazioni che avvengono in senso antiorario, il valore di
f
1 nel sistema di riferimento assoluto sarà dunque dato da1ass 1rel
9.3 Hz
f
= Ω −
f
=
Come si è già visto nel Capitolo 2, in uno dei lavori di tesi precedenti [18] è stato effettuato lo studio delle instabilità fluidodinamiche sull’induttore FIP mediante l’analisi
delle fluttuazioni di pressione con delle prove effettuate a una velocità di rotazione di 2500 rpm. Tra le diverse instabilità riscontrate, come si è già detto nella Sezione 5.3, ce n’era una rotante a singola cella con una frequenza di rotazione pari a 0.34Ω classificata come stallo rotante. Supponendo che la dipendenza da Ω della frequenza di rotazione dello stallo rotante sia lineare, a Ω=1500 rpm tale instabilità avverrebbe dunque ad una frequenza di rotazione di 8.5 Hz. Essendo tale valore molto vicino a quello di
f
1 ass si pensa, pertanto, che lo stallo rotante sia dovuto proprio all’oscillazione della lunghezza delle cavità trovata mediante l’analisi dei filmati. Tutto ciò è anche in accordo con la supposizione fatta nella Sezione 5.3 a proposito dell’oscillazione delle dimensioni delle cavità riscontate dall’analisi dei filmati laterali.Nelle figure seguenti sono mostrate l’analisi della fase della cross-correlazione e le sinusoidi per altre due condizioni di flusso. E’ facile verificare che le stesse osservazioni sulle caratteristiche del fenomeno alla frequenza
f
1 si possono fare anche per le altre condizioni di flusso. 0 50 100 150 200 250 0 5000 A m pi ez z a 0 50 100 150 200 250 -200 0 200 F a s e 3 -> 2 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 1 ->3 [° ] Frequenza [Hz] 0 50 100 150 200 250 -200 0 200 F a s e 2 -> 1 [° ] Φ =0.053 σ =0.39 f 1Figura 5.35 - Ampiezza della trasformata di Fourier della lunghezza della cavità sulla terza pala
(blu) e fase della cross-correlazione tra i segnali ricavati sulle tre pale(verde) (
φ
=0.053, =0.39, 1500σ
Ω = rpm)0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 t [s] l c /p Pala n°1 Pala n°2 Pala n°3
Figura 5.36 - Oscillazioni della lunghezza delle cavità alla frequenza
f
1 sulle tre paledell’induttore (
φ
=0.053, =0.39, 1500σ
Ω = rpm) 0 50 100 150 200 250 0 2000 4000 A m pi ez z a 0 50 100 150 200 250 -200 0 200 F a s e 3 ->2 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 2 ->1 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 1 ->3 [° ] Frequenza [Hz] Φ =0.034 σ =0.45 f 1Figura 5.37 - Ampiezza della trasformata di Fourier della lunghezza della cavità sulla terza pala
(blu) e fase della cross-correlazione tra i segnali ricavati sulle tre pale (verde) (
φ
=0.034, =0.45, 1500σ
Ω = rpm)0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 t [s] l c /p Pala n°1 Pala n°2 Pala n°3
Figura 5.38 - Oscillazioni della lunghezza delle cavità alla frequenza
f
1 sulle tre paledell’induttore (
φ
=0.034, =0.45, 1500σ
Ω = rpm)5.6.2 Analisi delle oscillazioni di area frontale
Anche dall’analisi dei waterfall plot relativi alle oscillazioni dell’area delle cavità (vedi per esempio Figure 5.39 e 5.40) è stato individuato il picco alla frequenza
f
1 in tutte le condizioni di flusso analizzate.Come nell’analisi delle fluttuazioni della lunghezza, l’analisi della fase della cross-correlazione tra i segnali ricavati sulle tre pale dell’induttore (Figura 5.41) conferma il fatto che si tratta di un fenomeno rotante a singola cella. Inoltre, con un’analisi analoga a quella effettuata nel paragrafo precedente (Figure 5.42, 5.43, 5.44 e 5.45), si vede che, anche in questo caso, il fenomeno ruota in senso orario.
Le Figure dalla 5.46 fino alla 5.50 mostrano l’analisi della fase della cross-correlazione e le sinusoidi per altre due condizioni di flusso. E’ facile verificare che le stesse osservazioni sulle caratteristiche del fenomeno alla frequenza
f
1 si possono fare anche per le altre condizioni di flusso.0 100 200 300 400 500 0.4 0.45 0.5 0.55 0.6 0 1 2 3 4 5 σ Frequenza [Hz] A m pi ez z a Φ =0.034 f1
Figura 5.39 - Waterfall plot per le oscillazioni dell’area delle cavità
(
φ
=0.034, 1500 Ω = rpm) 0 100 200 300 400 500 0.4 0.5 0.6 0 1 2 3 4 5 σ Frequenza [Hz] A m pi ez z a Φ =0.053 f 1Figura 5.40 - Waterfall plot per le oscillazioni dell’area delle cavità
0 50 100 150 200 250 0 1 2 A m pi ez z a 0 50 100 150 200 250 -200 0 200 F a s e 3 ->2 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 1 ->3 [ °] Frequenza [Hz] 0 50 100 150 200 250 -200 0 200 Fa s e 2 -> 1 [ °] Φ =0.053 σ =0.39 f 1
Figura 5.41 - Ampiezza della trasformata di Fourier dell’area della cavità sulla terza pala (blu) e
fase della cross-correlazione tra i segnali ricavati sulle tre pale (verde) (
φ
=0.053, =0.39, 1500σ
Ω = rpm) 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.5 1 1.5 2 2.5 3x 10 -6 t [s] A c /S fl o w Pala n°2 A3sin(2πf1t+φ3)Figura 5.42 - Sinusoide alla frequenza
f
1 sovrapposta al segnale (A Sc flow) ricavato sulla0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2x 10 -6 t [s] A c /S fl o w Pala n°3 A2sin(2πf1t+φ2)
Figura 5.43 - Sinusoide alla frequenza
f
1 sovrapposta al segnale (A Sc flow) ricavato sulla terzapala 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.5 1 1.5 2 2.5 3 3.5x 10 -6 t [s] A c /S fl o w Pala n°1 A1sin(2πf1t+φ1)
Figura 5.44 - Sinusoide alla frequenza
f
1 sovrapposta al segnale (A Sc flow) ricavato sulla prima pala0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.5 1 1.5 2 2.5x 10 -6 t [s] A c /S fl o w Pala n°1 Pala n°2 Pala n°3
Figura 5.45 - Oscillazioni dell’area delle cavità alla frequenza
f
1 sulle tre pale dell’induttore(
φ
=0.053, =0.39, 1500σ
Ω = rpm) 0 50 100 150 200 250 0 0.5 1 A m p ie zza 0 50 100 150 200 250 -200 0 200 F a s e 3 -> 2 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 2 ->1 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 1 -> 3 [° ] Frequenza [Hz] Φ =0.034 σ =0.50 f1Figura 5.46 - Ampiezza della trasformata di Fourier dell’area della cavità sulla terza pala (blu) e
fase della cross-correlazione tra i segnali ricavati sulle tre pale (verde) (
φ
=0.034, =0.50, 1500σ
Ω = rpm)0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 2 4 6 8 10 12 14x 10 -7 t [s] A c /S fl o w Pala n°1 Pala n°2 Pala n°3
Figura 5.47 - Oscillazioni dell’area delle cavità alla frequenza
f
1 sulle tre pale dell’induttore(
φ
=0.034, =0.50, 1500σ
Ω = rpm) 0 50 100 150 200 250 0 0.5 1 A m p ie zza 0 50 100 150 200 250 -200 0 200 F a s e 3 -> 2 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 2 ->1 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 1 -> 3 [° ] Frequenza [Hz] Φ =0.034 σ =0.45 f1Figura 5.48 - Ampiezza della trasformata di Fourier dell’area della cavità sulla terza pala (blu) e
fase della cross-correlazione tra i segnali ricavati sulle tre pale (verde) (
φ
=0.034, =0.45, 1500σ
Ω = rpm)0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 0.5 1 1.5x 10 -6 t [s] A c /S fl o w Pala n°1 Pala n°2 Pala n°3
Figura 5.49 - Oscillazioni dell’area delle cavità alla frequenza
f
1 sulle tre pale dell’induttore(
φ
=0.034, =0.50, 1500σ
Ω = rpm)5.7 Analisi combinata delle fluttuazioni di pressione e delle
dimensioni delle cavità
Per avere la totale conferma sia della supposizione fatta nella Sezione 5.3, sia dei risultati trovati nel paragrafo precedente, nell’ultima fase del lavoro si è deciso di effettuare un’analisi contemporanea sia delle fluttuazioni di pressione (grazie ai trasduttori piezoelettrici), sia di quelle delle dimensioni delle cavità (mediante i metodi appena descritti).
Figura 5.50 – Condotto in plexiglas contenente i trasduttori (sinistra) e schema di montaggio dei
trasduttori nella stazione d’ingresso (destra)
Per poter far ciò sono stati inseriti sul condotto in plexiglas contenente l’induttore i trasduttori piezoelettrici utilizzati per l’analisi delle instabilità fluidodinamiche nei lavori di tesi precedenti ([13] e [14]). La Figura 5.50 mostra sia i trasduttori così come sono stati
montati sul plexiglass (sinistra), sia le posizioni dei trasduttori installati nella stazione di ingresso (destra). In quest’ultimo schema, in particolare, viene sottolineata la distanza angolare tra i trasduttori che, come si è visto in precedenza, è importante per il calcolo della frequenza di rotazione e del numero di celle di eventuali fenomeni rotanti.
Di seguito sono riportati i risultati ottenuti sulla prova effettuata in una particolare condizione di flusso.
Il modulo dell’autospettro del segnale acquisito da uno dei trasduttori presenti nella stazione d’ingresso e la fase della cross-correlazione tra il segnale acquisito dallo stesso trasduttore e da uno posto ad una distanza angolare di 45° sono mostrati in Figura 5.51.
0 10 20 30 40 50 60 70 80 90 100 0 0.5 1 1.5 2x 10 6 A m pi ez z a S xx 0 1 3Ω 3Ω 3Ω 3Ω 3Ω 2Ω f 2=Ω-f1 Φ = 0.034 σ = 0.52 200 0 20 30 40 50 60 70 80 90 100 -200 -100 0 100 Frequenza [Hz] Fa s e [ °] f 1
Figura 5.51 – Ampiezza dell’autospettro della pressione in ingresso (blu) e fase della
cross-correlazione tra i segnali acquisiti da due trasduttori con separazione angolare di 45° (
φ
=0.034, =0.52, 1500σ
Ω = rpm)Come si vede dal grafico in alto, è ben riconoscibile, tra gli altri, un picco del modulo dell’autospettro alla frequenza denominata
f
1 pari a 10.3 Hz (≈
0.41
Ω
). Dal grafico in basso si vede che la fase della cross-correlazione è diversa da zero. Si tratta dunque di un fenomeno rotante.Come mostrato in Tabella 5.1, il rapporto tra la separazione angolare dei trasduttori e la fase della cross-correlazione, è praticamente pari a uno qualunque sia la coppia di trasduttori scelti. Per le osservazioni fatte nella Sezione 5.5 il fenomeno ha quindi una frequenza di rotazione esattamente pari a
f
1 e coinvolge una singola cella. Infine il fatto che nello spettro compaia anche la frequenzaf
2= Ω −
f
1 implica che il fenomeno ruota nella stessa direzione di rotazione dell’induttore (in quantof
2 rappresenta la frequenza di rotazione che avrebbe il fenomeno in un sistema di riferimento solidale alle pale se fosse corotante). Questo fenomeno può quindi essere classificato come stallo rotante.Frequenza
f
1=
10.3 Hz
Fase 1-2
45°
Fase 1-3
83°
Fase 1-4
126°
Fase 1-5
175°
Fase 1-6
220°
Tabella 5.1 – Fase della cross-correlazione tra il segnale acquisito dal trasduttore n°1 e quello
acquisito dagli altri trasduttori della stazione d’ingresso
La Figure 5.52 e 5.53 mostrano rispettivamente l’analisi di Fourier delle oscillazioni di lunghezza e area delle cavità calcolate dal filmato registrato contemporaneamente all’acquisizione dei segnali di pressione da parte dei trasduttori. In entrambi gli spettri è presente un picco alla frequenza
f
c pari a 14.7 Hz.0 50 100 150 200 250 0 2000 4000 A m pi ez z a 0 50 100 150 200 250 -200 0 200 F a s e 2 ->1 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 3 ->2 [° ] 0 50 100 150 200 250 -200 0 200 F a s e 1 ->3 [° ] Frequenza [Hz] Φ= 0.034 σ =0.52 f 1
Figura 5.52 - Ampiezza della trasformata di Fourier della lunghezza della cavità sulla terza pala
(blu) e fase della cross-correlazione tra i segnali ricavati sulle tre pale (verde) (
φ
=0.034, =0.52, 1500σ
Ω = rpm)0 50 100 150 200 250 0 0.5 1 Am p ie z z a 0 50 100 150 200 250 -200 0 200 F a s e 2 ->1 [° ] 0 50 100 150 200 250 -200 0 200 Fa s e 3 -> 2 [ °] 0 50 100 150 200 250 -200 0 200 F a s e 1 ->3 [° ] Frequenza [Hz] Φ =0.034 σ =0.52 f c
Figura 5.53 - Ampiezza della trasformata di Fourier dell’area della cavità sulla terza pala (blu) e
fase della cross-correlazione tra i segnali ricavati sulle tre pale (verde) (
φ
=0.034, =0.52, 1500σ
Ω = rpm)La fase della cross-correlazione tra i segnali calcolati sulle diverse pale è diversa da zero e, per esempio nel caso delle oscillazioni di lunghezza, è pari a 120°, 155° e 85° per i tre grafici di Figura 5.53 rispettivamente. Ciò significa che il rapporto tra la fase della cross-correlazione e la separazione angolare media tra le cavità (che è approssimativamente di 120°) è mediamente pari a uno, pertanto il fenomeno ruota, in un sistema di riferimento solidale alle pale, alla frequenza di rotazione
f
c ed è a singola cella. Inoltre, da un’analisi simile a quella effettuata nel paragrafo precedente si nota (vedi Figure 5.54 e 5.55) che il fenomeno ruota in senso orario (dalla pala n°1 alla pala n°2 e infine alla pala n°3).Essendo
f
c calcolata in un sistema di riferimento solidale alle pale, il suo valore in un sistema di riferimento assoluto sarà dato da10.3 Hz
c ass c rel
f
= −
f
+ Ω =
Dato che
f
c ass è esattamente uguale af
1 possiamo dunque confermare il fatto che lo stallo rotante è causato proprio dalle oscillazioni delle dimensioni delle cavità sulle pale.0 0.05 0.1 0.15 0.2 0.25 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 t [s] l c /p Pala n°1 Pala n°2 Pala n°3
Figura 5.54 - Oscillazioni della lunghezza delle cavità alla frequenza
f
c sulle tre paledell’induttore (
φ
=0.034, =0.52, 1500σ
Ω = rpm) 0 0.05 0.1 0.15 0.2 0.25 -2 0 2 4 6 8 10 12 14x 10 -7 t [s] A c /S fl o w Pala n°1 Pala n°2 Pala n°3Figura 5.55 - Oscillazioni dell’area delle cavità alla frequenza
f
c sulle tre pale dell’induttore5.8 Note bibliografiche al Capitolo 5
[1] K. Sato, S. Shimojo, J. Watanabe, Observation of chain-reaction behaviour at
bubble collapse using ultra high speed video camera, 4th ASME_JSME Joint
Fluids Engineering Conference, 2003.
[2] N. Berchiche, M. Grekula, G. Bark, Concept of focusing of collapse energy –
application to cavitation observation, 5th International Symposium on Cavitation,
2002.
[3] K. Kato, Y. Matudaira, H. Obara, Flow visualization of cavitation with particle and
bubble image processing, 4th ASME_JSME Joint Fluids Engineering Conference,
2003.
[4] R. Lindken, P. Meyer, W. Merzkirch, Time resolved PIV measurements with systems of bubbles rising in water, ASME Fluids Engineering Division Summer Meeting, 2000.
[5] M.S. Iliescu, G.D. Ciocan, F. Avellan, 2 phase PIV measurements at the runner
outlet in a Francis turbine, 4th ASME_JSME Joint Fluids Engineering Conference,
2003.
[6] G.L. Chahine, K.M. Kalumuck, J-Y Cheng, G.S. Frederick, Validation of bubble distribution measurements of the ABS Acoustic Bubble Spectrometer with high
speed video photography, 4th International Symposium on Cavitation, 2001.
[7] K. Kamijo, T. Shimura, Y. Tsujimoto, Experimental and analytical study of rotating cavitation, Cavitation and gas-liquid flow in fluid machinery and devices, 1994.
[8] T. Hashimoto, M. Yoshida, M. Watanabe, K. Kamijo, Y. Tsujimoto, Experimental study on rotating cavitation of racket propellant pump inducers, Journal of Propulsion and Power, 1997.
[9] Y. Tsujimoto, Y. Yoshida, Y. Maekawa, S. Watanabe, T. Hashimoto, Observation of oscillating cavitation of an inducer, Journal of Fluids Engineering, 1997.
[10] Y. Yoshida, Y. Tsujimoto, D. Kataoka, H. Horiguchi, F. Wahl, Effects of alternate leading edge cutback on unsteady cavitation in 4-bladed inducers, ASME Fluids Engineering Division Summer Meeting, 2000.
[11] Fujii, S.Azuma, Y. Yoshida, Y. Tsujimoto, H. Horiguchi, S. Watanabe, Higher order rotating cavitation in an inducer, International Journal of Rotating Machinery, 2004.
[12] F. Joussellin, Y. Courtot, O. Coutier-Delgosha, J.L. Reboud, Cavitating inducer instabilities: experimental analysis and 2D numerical simulation of unsteady flow
in blade cascade, 4th International Symposium on Cavitation, 2001.
[13] R. Testa, Studio sperimentale delle instabilità fluidodinamiche di cavitazione su un induttore commerciale e sul MK1 della turbopompa LOX di Ariane 5, Tesi di Laurea in Ingegneria Aerospaziale, Università di Pisa, 2003.
[14] L. Torre, Studio sperimentale delle prestazioni e delle instabilità fluidodinamiche su un prototipo dell’induttore della turbopompa LOX del motore VINCI, Tesi di Laurea in Ingegneria Aerospaziale, Università di Pisa, 2004.
[15] Fastec Imaging™, The Ranger Datasheet, 2005.
[16] C.E. Brennen, A.J. Acosta, Theoretical, quasistatic analysis of cavitation compliance in turbopumps, Journal of Spacecraft and Rockets, 1973
[17] C.E. Brennen, Hydrodynamics of pumps, Oxford University Press, 1994.
[18] J.S. Bendat, A.G. Piersol, Random data: analysis and measurement procedures, Wiley-Interscience, New York, 1971.