Capitolo 2
Il jitter e il rumore di fase
L’oscillatore locale dei sistemi di trasmissione e di ricezione è realizzato con un VCO od un sintetizzatore di frequenza PLL il cui “cuore pulsante” è comunque il VCO. E’ perciò importante conoscere i meccanismi che generano il rumore di fase all’uscita del VCO e le soluzioni per minimizzarlo.
Il rumore di fase dell’oscillatore locale (LO) di un transceiver è dannoso per le prestazioni complessive di un sistema di comunicazione seriale dei dati, in quanto fa variare il periodo del segnale di riferimento costruito localmente per la sincronizzazione dei meccanismi di serializzazione e deserializzazione. Tale fenomeno aleatorio è chiamato jitter.
I contributi di rumore in un oscillatore sono dovuti sia ai dispositivi attivi e passivi costituenti il circuito, sia ad accoppiamenti a sorgenti esterne, imprescindibili alle alte frequenze, e danno luogo sia ad un rumore di ampiezza (AM) sia ad un rumore di fase (FM o PM).
Gli oscillatori lineari, infatti, mostrano un’eguale quantità di rumore di ampiezza e di rumore di fase sul segnale prodotto perché semplicemente il rumore si somma al segnale, in quanto non sono presenti i meccanismi non lineari di stabilizzazione dell’ampiezza a regime che sopprimono buona parte delle fluttuazioni AM (come illustrato nel cap.1).
Questo, invece, succede negli oscillatori non lineari : ci riferiremo quindi solo alla caratterizzazione delle perturbazioni della fase nella forma d’onda di uscita dell’oscillatore.
2.1 Il rumore di fase
Se consideriamo l’uscita ideale in tensione di un oscillatore autonomo in funzione del tempo, questa può essere espressa come:
v0(t) =V0 cos(2πf0t) (1)
dove f0 è la frequenza fondamentale e V0 è l’ampiezza nominale in tensione. L’ uscita dello stesso oscillatore ,sotto l’influenza dei processi rumorosi , può essere descritta come segue:
vn(t)=V0cos(2πf0t+ϕ(t)) (2)
dove ϕ(t) è un processo casuale (random) che modella il rumore di fase.
La densità spettrale di potenza di ϕ(t) , Sϕ(fm) , descrive la potenza di rumore di tale processo nel dominio della frequenza .1
E’ molto difficile misurare direttamente Sϕ(fm) con un analizzatore di spettro, per questo si preferisce misurare Sv(fm) , cioè la densità spettrale di potenza del segnale vn(t) . In genere ci si riferisce alla misura della densità spettrale di potenza di rumore SSB (single sideband) normalizzata definita da :
0 0 ,1 ) ( ) ( P Hz f f P f L sideband m m + = (3)
dove Psideband rappresenta la potenza SSB alla frequenza di offset fm in 1 Hz di larghezza di banda e P0 è la potenza media della fondamentale del segnale periodico prodotto dall’oscillatore .
Oscillatore Ideale
Oscillatore Reale Rumoroso
2.2 Il jitter
Il jitter (nel dominio del tempo) quantifica l’incertezza nel periodo d’oscillazione. Idealmente ,infatti , i fronti del segnale si verificano ad intervalli di tempo identici, come rappresentato in figura 2.2.1. In pratica ,invece, tali fronti deviano dalla loro posizione ideale.
Fig.2.2.1 : Andamento temporale di un segnale d’uscita (a) ideale , (b) con jitter.
E’ molto utile analizzare i vari aspetti del jitter e conoscere in che modo sono relazionati fra loro. Dal momento che vengono spesso usate simili terminologie con differenti significati , ci proponiamo di esplicitarli :
¾ Timing jitter : il timing jitter è definito come la deviazione di ogni fronte del segnale ( nel tempo ) dalla propria posizione ideale.
¾ Period jitter : è definito come la variazione del periodo di clock (fig.2.2.2). Questo aspetto sembra essere la maggiore preoccupazione per i progettisti dei sistemi digitali ad alta velocità, come i microprocessori. ♣
Periodo = Tn + ∆tn
Figura 2.2.2 : Period jitter
¾ Long Term jitter (Absolute jitter) : è definito come la variazione dell’intervallo di tempo tra un fronte e l’altro del clock attraverso più cicli del segnale. E’ la naturale estensione del Period jitter: mentre quest’ultimo è definito per un solo ciclo di clock, il long term jitter è definito per molti cicli (fig.2.2.3).
Figura 2.2.3 : Long-term jitter
¾ Cycle-to-cycle jitter : questo parametro misura la variazione tra due periodi consecutivi (fig.2.2.4).
Figura 2.2.4 :cycle-to-cycle jitter.
Il parametro di lungo termine, è solitamente usato per quantificare l’errore di fase complessivo di un circuito PLL rispetto ad un oscillatore ideale, ma non ha senso per descrivere le performance di un circuito oscillatore, perché divergente con il tempo e mancante di informazioni sulla dinamica delle fluttuazioni del singolo periodo dell’oscillazione. Per questo si fa uso del cycle-to-cycle jitter che caratterizza il fenomeno aleatorio di breve termine (variazioni con frequenza maggiore di 10Hz) per cui la temporizzazione della segnalazione di ogni bit differisce leggermente, in eccesso o in difetto, dall’andamento nominale. La differenza qualitativa dei 2 parametri risiede appunto nel fatto che il long-term jitter offre un termine di paragone del periodo dell’oscillazione con il valore medio nominale mentre, nel caso del cycle-to-cycle jitter l’attenzione è posta sulle differenze tra 2 periodi contigui. L’effetto del jitter sul deterioramento della purezza del segnale, nel dominio del tempo, è misurabile considerando i punti di attraversamento dello zero del segnale se, a regime, la forma d’onda è alternativa, oppure gli istanti di transizione, se la forma d’onda è rettangolare unipolare. In presenza di jitter, quindi, l’ennesimo periodo Tn differisce dalla durata nominale T per la quantità aleatoria [2] :
∆Tn =Tn −T (4)
Il long term jitter è allora definito come:
∑
= ∆ = ∆ N n n abs T T 1 (5)La deviazione standard di ∆Tn , che descrive statisticamente l’ampiezza delle fluttuazioni, determina il cycle jitter ∆Tc (che è il jitter del periodo):
(6)
Può essere espresso anche in termini adimensionali:
T T J c c ∆ =
Tale parametro non dà informazioni sulla dinamica di breve termine delle fluttuazioni, cioè delle variazioni rapide della fase che danno i maggiori problemi; tipicamente, infatti, per esprimere il jitter dinamico (cycle-to-cycle) in termini di
rumore di fase, viene trascurato il contributo spettrale 1/f upconverted, in quanto
provoca solo variazioni di fase lente nell’oscillazione .Il Jitter dinamico , quindi, è
dato dalla relazione:
(7)
Genericamente ,quindi , il jitter è definito come la deviazione standard σ∆Tabs dell’ absolute jitter e lo si può definire come :
σ∆Tabs =k ∆t (8)
0 2 2 f D k π ϕ = (9)
con Dϕ inteso come diffusività di fase dipendente dai parametri del circuito. Queste due relazioni sono valide solo in caso di sorgenti indipendenti di rumore bianco ( come vedremo in seguito). Dalla (8) è evidente che il jitter diverge con il tempo. Sapendo inoltre che 2 diversi intervalli di tempo ∆Tn sono statisticamente indipendenti, avremo le seguenti relazioni:
(10)
2.3 Conversione del jitter in rumore di fase
Il rumore di fase è definito nel dominio della frequenza , mentre il jitter è definito nel dominio del tempo .Essi , in pratica, caratterizzano lo stesso fenomeno ed è importante conoscere la relazione che li lega .
Se le sorgenti di rumore sono bianche , la densità spettrale di potenza Sφ(fm ) si scrive come [6] [7] :
(12)
Dalle equazioni (8) , (9) , (12) si ricava :
(13)
Da quest’ultima relazione si osserva come , per convertire il jitter nella densità spettrale di potenza , sia necessario calcolare la deviazione standard σ∆Tabs, peraltro molto difficoltoso nella pratica, in quanto si necessitano di molte misure e simulazioni. Si preferisce quindi sviluppare una relazione fra ∆Tc, ∆Tcc e Sφ(fm ) combinando le (9), (10) e (11), per ottenere il seguente risultato:
(14)
Combinando la (12) con la (14) si ottiene:
E , finalmente , dalla (13) e dalla (15) si ha l’importante relazione fra σ∆Tabs , ∆Tc, e ∆Tcc :
2.4 Le sorgenti di rumore e le diverse analisi del jitter e
del rumore di fase da esse dipendenti.
Le problematiche del jitter sono molteplici e sono state oggetto di numerose indagini, come possiamo ben riscontrare in letteratura.
Differenti aspetti del jitter possono coesistere all’interno dello studio di tale problematica e questo ne rende assai difficoltosa l’analisi.
Questo lavoro si propone di analizzare i diversi aspetti e le diverse sorgenti di rumore che contribuiscono al verificarsi di questo fenomeno.
Le sorgenti di rumore che causano il jitter possono essere raggruppate in due importanti categorie:
¾ Sorgenti di rumore random ( Random Noise Sources )
¾ Sorgenti di rumore deterministico (Deterministic Noise Sources)
Fra le sorgenti di rumore random possiamo catalogare i seguenti tipi di rumore: • rumore termico ( Thermal Noise)
• rumore 1/f (Upconverted Noise) • rumore shot
Fra le sorgenti di rumore deterministico possiamo invece inserire:
• rumore dovuto al substrato e alla tensione di alimentazione ( Supply and Substrate Noise )
• crosstalk
• impedence mismatch • interferenza intersimbolica
Le sorgenti di rumore possono essere classificate ulteriormente come [4] • sorgenti di rumore bianco ( White Noise Sources )
I metodi di analisi variano naturalmente secondo i vari tipi di sorgenti. Recentemente [4] è stata presentata una teoria per la caratterizzazione del rumore di fase e del timing jitter negli oscillatori dovuti alle colored noise sources , da contrapporre a quelli dovuti alle white noise sources.
Il rumore termico e il rumore shot possono essere considerati come sorgenti di rumore bianco mentre altri tipi di rumore, come 1/f , il rumore burst ,quello di substrato e il supply noise ,sono considerati sorgenti “colorate”.
Tale teoria è basata su una nuova analisi per le perturbazioni non lineari, valida per gli oscillatori , riassunta brevemente di seguito.
2.4.1 Analisi di perturbazioni non lineari
Le caratteristiche dinamiche di un oscillatore possono essere descritte da un sistema di equazioni differenziali del tipo
x& = f(x) (1)
un sistema perturbato ,quindi, può essere descritto dalla seguente:
x&= f(x)+B(x)b(t) (2)
dove b(t) può essere o random o deterministico. In quest’ultimo caso ,dopo un’accurata analisi, si giunge ad osservare che la risposta periodica imperturbata dell’oscillatore è modificata dal rumore secondo la seguente relazione:
xs(t+α(t)+y(t)) (3)
dove α(t) è la deviazione di fase che cresce col tempo anche per piccoli valori di b(t), e y(t) è un componente additivo , chiamato deviazione orbitale, che tiene conto dello
shift di fase nell’onda sinusoidale ed è sempre caratterizzato da piccoli valori.
Se si deriva l’equazione per α(t) e y(t) ,si ottiene un’equazione differenziale non lineare per la deviazione di fase , data da
( ) v1 (t (t))B(x (t (t)))b(t) dt t d s T α α α = + + α(0)=0 (4)
Dove v1T è un vettore a tempo-variante chiamato Floquet Vector [5] . Tale vettore è di fondamentale importanza per questa teoria. Dalla (4) si può vedere come α(t) aumenti notevolmente come integrale della perturbazione. Questo mostra come la
frequenza dell’oscillazione possa cambiare a causa dei disturbi, nel senso che un errore di fase che aumenta linearmente si traduce in un errore di frequenza.
Tale osservazione viene concretizzata sia per le perturbazioni “bianche”, sia per quelle “colorate” in [4] ed è valida genericamente per un oscillatore free-running .
1o CASO:
Considerando il caso in cui b(t) sia un vettore di un processo rumoroso Gaussiano bianco e stazionario ( come il rumore termico e shot ) , la varianza del jitter è espressa da:
dove
La varianza di α(t) cresce linearmente col tempo ed è proporzionale alla costante scalare c che in questo caso è sufficiente per descrivere il jitter e la distribuzione spettrale.Tale costante rappresenta la modulazione dell’intensità delle sorgenti di rumore . Inoltre l’uscita dell’oscillatore affetta da rumore bianco ( xs(t+α(t)) è un processo stocastico stazionario. Definendo Xi i coefficienti di Fourier del segnale xs(t) si ha:
dove f0 =1/T è la frequenza fondamentale. La deviazione di fase α(t) non altera la potenza totale del segnale periodico xs(t), ma modifica la densità spettrale di potenza . Per un segnale periodico ideale la densità spettrale di potenza dovrebbe avere delle δ di Dirac a frequenze discrete , mentre α(t) altera la loro posizione secondo la (6).
2o CASO :
Consideriamo ora b(t) come un processo stazionario, stocastico gaussiano “colorato”. Definiamo RN(τ) come la funzione di autocovarianza e SN(f) la sua densità spettrale di potenza date da:
Poniamo inoltre
Periodico in t con periodo T.
La (4) diventa allora:
Si può dimostrare che la deviazione di fase α(t) diventa un processo gaussiano stocastico . La sua funzione densità di probabilità è completamente caratterizzata
dal valore medio e dalla varianza e (per “larghi” tempi) α(t) diventa variabile random Gaussiana con un valor medio costante e una varianza data da
dove β è una costante data da |V02| 2 .
La varianza può essere anche espressa in termini di densità spettrale di potenza del processo b(t) tramite la seguente relazione:
Una volta ottenuta la caratterizzazione stocastica di α(t) , si è ulteriormente dimostrato che la funzione di autocovarianza di xs(t+ α(t)) è indipendente dal tempo (per “larghi” tempi) .
3o CASO :
Se consideriamo ,invece, che siano presenti entrambi i tipi di sorgenti ( bianche e colorate) , la deviazione di fase α(t) diventa una variabile Gaussiana random con valor medio costante .
Dall’analisi dell’intero spettro dell’oscillazione d’uscita si può vedere come siano presenti contributi di termini(di rumore bianco) dipendenti dalla frequenza secondo 1/f2 e termini (dovuti alle sorgenti di rumore colorato) dipendenti dalla frequenza 1/f2 moltiplicato alla densità spettrale del rumore stesso. [4]
Il Rumore di fase e il Timing jitter possono essere ottenuti dalla caratterizzazione stocastica che è stata appena descritta.
In pratica siamo solitamente interessati alla densità spettrale di potenza attorno alla prima armonica ( vedere Appendice 1 ) , e la L(fm) è definita come:
) 2 ) ( ( log 10 ) ( 2 1 0 10 X f f S f L m m + = (13)
Per piccoli valori di c (definito a pag. 21 ) la (13) prende la seguente forma :
+ ≈ 4 2 2 0 2 2 0 10 log 10 ) ( m m f c f c f f L π (14)
Un oscillatore ,come già illustrato precedentemente, genera una forma d’onda sinusoidale utilizzata come clock. Gli effetti della deviazione di fase hanno come conseguenza la presenza del jitter sugli attraversamenti dello zero (zero-crossing) dell’andamento temporale dell’onda .Se il clock fosse ideale e quindi perfettamente periodico, si avrebbero transizioni esattamente a tk=kT , con k=1, 2, …N e T periodo ; se ,invece, il clock è affetto da α(t) , il timing jitter della kth transizione tk ha varianza :
(
)
[
t kT]
ckT2.4.2 Modello generico per la caratterizzazione del rumore
di fase negli oscillatori free-running.
Questo lavoro si propone adesso di presentare un più generico modello per la caratterizzazione del rumore di fase , che sarà in seguito utilizzato per uno studio più specifico di questa problematica nelle diverse tipologie di oscillatori presentati nel capitolo 1 .
Esistono differenti modelli , oggetto di studio da parte di vari ricercatori ♣, che assumono ipotesi troppo restrittive e per questo applicabili solo a determinate classi di oscillatori. .Molti di questi si basano sul fatto di assumere gli oscillatori come sistemi lineari a tempo invariante (LTI) e non considerano i completi meccanismi per cui anche le sorgenti di rumore ‘elettrico’ contribuiscono al rumore di fase.
Dal momento che gli oscillatori sono sistemi periodici a tempo variante (LTV) , come tali devono essere considerati. Inoltre ,così facendo, si ha la possibilità di dare una stima degli effetti del rumore di fase dovuti sia a processi stazionari sia a quelli ciclostazionari.
Questo modello fornisce esplicite predizioni sulla relazione fra la forma d’onda e il rumore 1/f (upconversion noise ) .Contrariamente a radicate convinzioni, si dimostra che l’angolo 1/f3 nello spettro del rumore di fase è più piccolo di quello del rumore 1/f per un fattore determinato dalla simmetria della forma d’onda.
Questo risultato è molto importante per le applicazioni CMOS a RF in quanto l’effetto del rumore 1/f può essere ridotto tramite opportune metodologie di progetto. Un oscillatore può essere modellato come un sistema con n ingressi ( ognuno associato ad una sorgente di rumore ) e due uscite : l’ampiezza istantanea A(t) e la fase addizionale (ϕ(t)), definiti dalla seguente relazione:
Vout(t)=A(t) f[ω0t + ϕ(t)] (1)
fluttuazioni possono essere studiate nel dominio del tempo e della frequenza attraverso il comportamento dei due sistemi equivalenti rappresentati in figura 2.4.1 :
Figura 2.4.1 : Sistemi equivalenti per ampiezza e fase.
Entrambi i modelli sono a tempo variante.
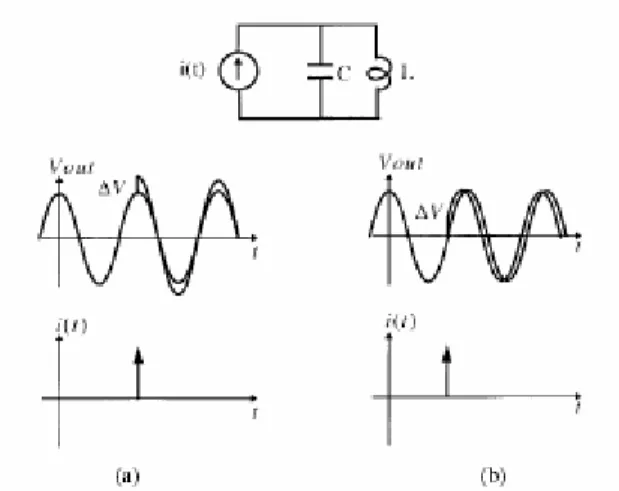
Prendiamo in considerazione un esempio specifico ,come un oscillatore ideale LC (fig.2.4.2):
Figura 2.4.2: Effetti di i(t) applicato sul picco di tensione(a) e sullo zero-crossing (b)
Se iniettiamo un impulso di corrente i(t) in prossimità del picco dell’onda (a) o in prossimità dell’attraversamento dello zero (zero-crossing) (b), la fase e l’ampiezza dell’oscillatore avranno una risposta simile a quella di figura. La variazione istantanea di tensione ∆V è data da:
tot
C q V = ∆ ∆
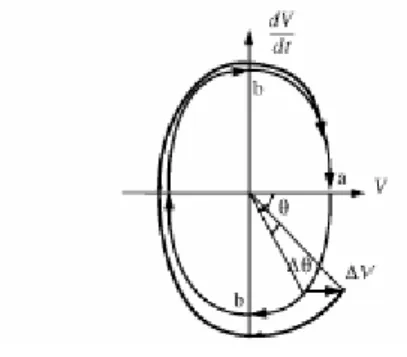
dove ∆q è la carica totale dovuta all’impulso di corrente e Ctot è la capacità totale presente in quel nodo. E’ importante notare come nel caso (a) risulti solo una variazione d’ampiezza e nessuno shift di fase, mentre nel caso (b) sia massimo l’effetto su ϕ(t) e minimo sull’ampiezza. Tutto ciò si può spiegare tramite il cosiddetto Ciclo Limite rappresentato in figura 2.4.3:
Figura 2.4.3 : Ciclo Limite
Il caso (a) è equivalente ad un improvviso salto di tensione nel punto a , mentre il caso (b) corrisponde alla sola variazione di fase e non d’ampiezza. Naturalmente inserire l’impulso di corrente fra a e b corrisponde ad avere entrambe le distorsioni. Avendo stabilito l’essenziale natura a tempo variante dell’ oscillatore , assumiamone anche una trattazione lineare (peraltro facilmente dimostrabile [8] ) , per cui le funzioni di trasferimento hϕ(t,τ) e hA(t,τ) (vd. fig. 2.4.1) li caratterizzeranno
completamente.
Come già detto precedentemente analizzeremo solo il la distorsione di fase . La hϕ(t,τ) è data dalla seguente relazione :
( , ) ( ) ( ) max 0τ τ ω τ ϕ − Γ = u t q t h (2)
dove qmax è la massima carica dislocata sul condensatore e u(t) è un gradino unitario. Γ(x) ,invece, è una funzione dimensionale , periodica di 2π e indipendente dalla
frequenza , comunemente chiamata impulse sensitivity function (ISF). In pratica dà
un’idea di quanto è lo shift di fase dopo l’applicazione di un impulso unitario a t=τ. Per dare un’idea di cosa sia Γ(x) basta osservare la figura 2.4.4, in cui viene mostrato l’andamento di uscita di un tipico oscillatore LC con la sua relativa ISF.
Figura 2.4.4 : Forma d’onda e ISF per un oscillatore LC
Per una Γ(x) data , la funzione φ(t) è espressa da :
∫
∫
∞ − +∞ ∞ − = Γ = t i d q d i t h t τ τ τ ω τ τ τ ϕ( ) ϕ( , ) ( ) 1 ( 0 )( ) max (3)Dal momento che la ISF è periodica , si può esprimere per mezzo della serie di Fourier: cos( ) 2 ) ( 0 1 0 0 n n n n c c ω τ θ τ ω = + + Γ
∑
∞ = (4)dove i cn sono coefficienti di Fourier reali e θn è la fase dell’armonica ennesima ( per le sorgenti di rumore random può essere trascurata). Sostituendo la (4) nella (3) otterremo:
+ =
∫
∑ ∫
∞ − ∞ = −∞ t n t n i n d c d i c q t 1 0 0 max ) cos( ) ( ) ( 2 1 ) ( τ τ τ ω τ τ ϕ (5)Questa equazione permette di trovare la φ(t) dati i coefficienti di Fourier della ISF. Se consideriamo una corrente iniettata nel nodo di interesse ad una frequenza vicina a quella dei portatori ( carrier frequency) , data da
i(t)=I1cos[(ω0+ ∆ω)t]
lo spettro di i(t) è dato da due impulsi a ±(ω0 +∆ω) (fig. 2.4.5). Alle basse frequenze la φ(t) è data da :
(6) il cui spettro è ancora costituito da due δ di Dirac a ±∆ω (fig. 2.4.5 ).
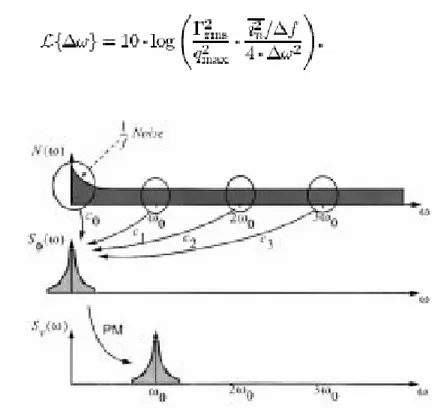
Fig. 2.4.5: Conversione del rumore alle frequenze multiple della fondamentale nel rumore
Per ottenere la densità spettrale di potenza di tensione d’uscita dell’oscillatore (Sv(ω)) dobbiamo conoscere la relazione fra l’uscita in tensione e la fase addizionale φ(t) .
Sostituendo la (6) nella (1) si ottiene una modulazione di fase single-tone per l’uscita in tensione; lo spettro di un impulso di corrente alla frequenza nω0+∆ω risulta avere una potenza della banda laterale data da:
2 max 4 log 10 ) ( ∆ = ∆ ω ω q c I P n n SBC (7)
Dalla (7) si evince che le componenti di rumore allocate a frequenze multiple di quella dell’oscillazione vengono portate a bassa frequenza per Sφ(ω) e si trasformano in rumore di fase nello spettro di Sv(ω) (fig. 2.4.6).
Per quantificare la potenza di banda laterale del rumore di fase consideriamo una corrente di rumore con una densità spettrale pari a in2/∆f ,la sua L(∆ω) è:
(8) Dato che
(9)
(10)
Figura 2.4.6 : Conversione del rumore in fluttuazioni di fase e in rumore di fase nelle
bande laterali
Andando inoltre ad analizzare la relazione fra l’angolo 1/f e l’angolo 1/f 3 nello spettro del rumore di fase ( fig. 2.4.7) , si nota come non sia così ovvio che queste due frequenze coincidano, il loro comportamento , infatti , dipende dallo specifico valore dei vari coefficienti cn . Il rumore nella zona dominata dal flicker (∆ω<ω1/f) è descritta dalla seguente relazione:
ω ω ∆ = f n f n i i2 2 1/ / 1 , (11) Combinando la (7) e la (11) otteniamo : (12)
Il legame fra ω1/f 3 e ω1/f è data da : 2 1 2 0 / 1 2 2 0 / 1 / 1 3 2 ≈ Γ = c c c f rms f f ω ω ω (13) Figura 2.4.7 : (a) PSD di φ(t) ;
(b) spettro della potenza SSB del rumore di fase
Come si può vedere dalla (13) la frequenza ω1/f 3 è più piccola di ω1/f di un fattore
rms c Γ 2 2 0 dove c
0 dipende ( come detto precedentemente) dalla forma d’onda e può essere significativamente ridotto se tale onda è simmetrica.
Oltre alla natura LTV del sistema, esiste un’ulteriore complicazione : la proprietà statistica di alcune sorgenti di rumore random dell’oscillatore per cui queste possono cambiare nel tempo in maniera periodica. In questo senso vengono considerate come processi ciclostazionari. In particolare , il rumore di canale di un dispositivo MOS in un oscillatore è ciclostazionario, mentre il rumore termico di un resistore è stazionario in quanto non cambia col tempo.
Se sostituiamo la corrente di rumore bianca ciclostazionaria data da in(t)=in0(t)α(ω0t) nella (3) si ottiene:
(14)
Il rumore ciclostazionario ,quindi, può essere trattato come rumore stazionario applicato ad un sistema che ha un’effetiva ISF data da
Γeff(x)= Γ(x)α(x) (15)
dove α(x) può essere facilmente ricavata dalle caratteristiche di rumore del dispositivo e dal punto di riposo.
Il metodo d’analisi appena presentato può essere utilizzato per dare un’idea di quanto ciascuna sorgente di rumore contribuisce al rumore di fase; inoltre può essere esteso a sorgenti di rumore multiple e a diversi nodi del sistema considerato.
Dalle relazioni presentate emergono importanti considerazioni per la riduzione del rumore di fase negli oscillatori .
In primo luogo, l’incremento della carica qmax dislocata sulla capacità porta ad una riduzione del rumore di fase , come ampiamente analizzato in [9] e [10].
In secondo luogo , la potenza di rumore alle frequenze multiple della fondamentale dà un contributo maggiore rispetto a quello delle altre frequenze dato che le sue componenti si trovano vicino alla frequenza d’oscillazione ( come descritto dalla (7)). Dal momento che tali contributi dipendono dai coefficienti serie di Fourier cn di ISF , il progettista deve provvedere a minimizzare le interferenze in prossimità delle
nω0 per valori di n che rendono grande cn .
Inoltre , come suggerito dalla (13) , è desiderabile minimizzare il valore in continua della ISF . Come già accennato , tale valore dipende molto dalla simmetria della
differenziali , dato che hanno certamente proprietà simmetriche più accentuate. D’altra parte , però , questa simmetria differenziale soffre per l’indipendenza delle varie sorgenti di rumore .
2.5 I meccanismi del rumore di fase nei VCO
Come già ampiamente spiegato in precedenza , gli oscillatori sono sistemi lineari a tempo variante . Nonostante ciò, in letteratura spesso si utilizzano approssimazioni che permettono di considerare tali circuiti a tempo invariante : questa ipotesi è tanto più avvalorata quanto più è forte l’automatic level control (ALC) , che riduce l’ampiezza dell’oscillazione. I parametri del circuito , dunque, possono essere considerati a tempo invariante per un largo numero di cicli finchè l’ALC rimane relativamente lento [3] .
In questo senso possiamo considerare l’oscillatore come un sistema lineare (fig. 2.5.1):
Fig. 2.5.1 : Sistema di oscillatore lineare
Sono 3 i principali meccanismi che contribuiscono, in modo distinto al rumore di fase: il rumore additivo iniettato nell’anello di reazione (signal path), il rumore all’ingresso di controllo (control path), detto anche rumore moltiplicativo a bassa frequenza, ed il rumore moltiplicativo delle non linearità [3].
Il contributo di una sorgente di rumore additivo al rumore di fase dell’uscita è studiabile nel modello linearizzato del circuito reazionato costituente il core dell’oscillatore e dà luogo ad una accurata predizione se il circuito effettivamente lavora linearmente per la maggior parte del periodo, come tipicamente accade negli oscillatori ad anello a carico resistivo. Tipicamente, in tali topologie, all’aumentare del numero degli stadi l’errore dell’approssimazione lineare cresce [3].
H(s)
+
VCONT Noise n(t) y(t) H(s) y(t)+
Noise n(t) VCONT (a) (b)Fig. 2.5.2 : Contributi al rumore di fase nel (a) signal
path e (b) nel control path
I transistor sono la fonte maggiore di rumore, perciò le configurazioni del core dell’oscillatore devono contenere il minor numero di elementi attivi nel signal path dell’anello di reazione. Il rumore iniettato nel signal path viene modellato dal guadagno di potenza del circuito reazionato, attorno alla frequenza della fondamentale, con andamento
(1)
dove ∆ω è lo scostamento da ω0 [3]. Questa è la ben nota equazione di Leeson [14]. E’ evidente come siano esaltati dal circuito reazionato i contributi di rumore ad alta frequenza nei dintorni della fondamentale (fig. 2.5.3).
Fig. 2.5.3 : Noise shaping del rumore additivo ad alta frequenza
Il rumore presente all’ingresso di controllo del VCO modula la frequenza dell’oscillazione d’uscita, con l’effetto di traslare le componenti a bassa frequenza del rumore nella regione dello spettro attorno alla fondamentale. Per quantificare l’effetto della modulazione FM sull’uscita, il rumore viene rappresentato per unità di banda con una sinusoide con uguale potenza media ottenendo che, nelle condizioni tipiche di modulazione a banda stretta, il rumore di fase in uscita è proporzionale al guadagno KVCO del VCO ed è inversamente proporzionale alla frequenza del contributo di rumore, rendendo il rumore 1/f particolarmente nocivo nel control path. Le tecniche che consentono di realizzare un VCO a bassa sensitività, rendono tale circuito più immune al rumore presente sull’ingresso di controllo.
Il modello reazionato lineare non tiene conto degli effetti di modulazione e mixing dovuti alle non linearità, inoltre va considerata la ciclostazionarietà delle sorgenti di rumore nel signal path, cioè i parametri statistici che le caratterizzano hanno un andamento temporale periodico, perché le condizioni di polarizzazione del circuito reale sono funzioni periodiche del tempo ( come già visto nel paragrafo 2.4.2).
Uno stadio di amplificazione non lineare pilotato da una sinusoide dà in uscita una tensione il cui andamento nel tempo può essere sviluppato in serie di Taylor come Vout=α1Vin+α2Vin2+α3Vin3. Quindi rappresentando il contributo di rumore in ingresso per unità di banda con una sinusoide, come già detto, si ottengono i seguenti contributi all’uscita: out1 2 0 0 2 0 0 out2 3 0 0 2 out3 3 0 V ( ) cos[( ) ]
( ) cos cos V ( ) cos[( 2 ) ]
V ( ) cos[(2 ) ] n n in n n n n o n n t A A t V t A t A t t A A t t A A t α ω ω ω ω α ω ω α ω ω ∝ ± = + ⇒ ∝ − ∝ − ,
dove An<<A0. Analoghi contributi costituiscono il rumore all’uscita dell’oscillatore, generato dalle non-linearità.
Vout1(t) appare nella banda dell’oscillatore solo se il contributo del rumore è significativo alle basse frequenze ma α2 si annulla nelle topologie completamente differenziali. L’unico prodotto di intermodulazione significativo in tale caso è Vout3. In pratica le non-linearità copiano tutti i contributi di rumore additivo sotto ω0 simmetricamente sopra tale frequenza e viceversa (fig. 2.5.4). I livelli di potenza
sono poi modellati dal sistema reazionato come predetto dalla (6), ma il contributo di potenza di rumore di fase risulta almeno raddoppiato nel sistema non lineare.
Fig 2.5.4 : Meccanismo non lineare del rumore moltiplicativo ad alta frequenza
In questo caso sono significative le componenti di rumore nei pressi della frequenza fondamentale perciò il meccanismo che dà luogo al rumore di fase prende il nome di rumore moltiplicativo ad alta frequenza [3].
Le formule che descrivono i meccanismi qui introdotte perdono di validità per offset grandi di frequenza dalla fondamentale, perché il rumore di fase non decresce indefinitamente ma raggiunge un livello di base, abbastanza piatto, detto noise floor. Tra le sorgenti di rumore il contributo più significativo nel sistema non-lineare è dato dal rumore di eccesso 1/f degli elementi attivi nel signal path, traslato in alto (upconverted) attorno alla frequenza fondamentale (carrier) per intermodulazione con il segnale periodico di regime dell’anello di reazione (fig. 2.5.5).
Fig. 2.5.5 : Upconversion per intermodulazione del rumore LF attorno alla fondamentale
I transistor utilizzati negli oscillatori devono essere caratterizzati da un basso livello del rumore a bassa frequenza (LF), cioè il rumore 1/f, ed una frequenza di corner fc
molto bassa.
Il rumore termico della resistenza di base ed il rumore shot di conduzione, entrambi con il livello della densità spettrale di potenza indipendente dalla frequenza (rumore bianco), contribuiscono, assieme al rumore termico legato alle perdite dissipative di potenza di tutti gli elementi passivi, a formare il noise floor, cioè il livello minimo della densità spettrale di potenza del segnale d’uscita. Tale livello viene fortemente attenuato utilizzando un risonatore passivo molto selettivo, mentre il rumore LF
upconverted viene trattato dal sistema come rumore additivo ma passa quasi
inalterato perché troppo vicino alla fondamentale.
Quattro regole generali per la progettazione degli oscillatori a basso rumore hanno origine dall’equazione di Leeson (1), che descrive come il circuito reazionato esalti il rumore additivo iniettato nell’anello anello di reazione sia di tipo bianco, sia di tipo LF upconverted, permettendo una buona predizione dei dati sperimentali sul rumore di fase: 0 2 2 L 1 ( ) ( ) 4Q noise carrier P P w w w D = D L ,
dove ∆ω è la frequenza di offset, ω0 è la frequenza centrale dell’oscillazione prodotta e Pnoise è la potenza per unità di banda calcolata in ∆ω di ciascuna sorgente di rumore additivo, proporzionale alla cifra di rumore del dispositivo a cui la sorgente è associata .
Le regole di progettazione sono:
(a) uso di risonatori passivi a Q elevato;
(b) minimizzazione del numero degli elementi attivi e passivi con perdite nell’anello di reazione ;
(c) utilizzo dei dispositivi attivi con la più bassa NFmin; (d) massimizzazione della dinamica picco-picco (swing) dell’oscillazione (Pcarrier).
Le regole (a) e (b) rendono le topologie ad anello ed a rilassamento poco attraenti per applicazioni di comunicazione dati ad alta velocità, in quanto caratterizzati dal QL quasi unitario e costituiti da numerosi dispositivi rumorosi nell’anello di reazione.
![Figura 2.1.1 : Rumore di fase negli oscillatori [3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/5674956.72279/3.892.390.550.168.421/figura-rumore-fase-oscillatori.webp)